雙旋翼無人機(jī)串級線性自抗擾控制
2019-04-15 11:25:22張勇陳增強(qiáng)張興會孫青林孫明瑋
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
張勇,陳增強(qiáng),張興會,孫青林,孫明瑋
?
雙旋翼無人機(jī)串級線性自抗擾控制
張勇1,陳增強(qiáng)1,張興會2,孫青林1,孫明瑋1
(1. 南開大學(xué) 計(jì)算機(jī)與控制工程學(xué)院,天津,300350;2. 天津中德應(yīng)用技術(shù)大學(xué),天津,300350)
介紹線性自抗擾控制器(LADRC)和串級線性自抗擾控制器的組成結(jié)構(gòu),包括線性跟蹤微分器、線性擴(kuò)張狀態(tài)觀測器以及線性誤差控制律,并給出各部分的典型算法。為了解決縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)中欠驅(qū)動(dòng)、多變量、強(qiáng)耦合的控制問題,設(shè)計(jì)串級線性自抗擾控制器。研究結(jié)果表明:所設(shè)計(jì)的串級線性自抗擾控制器參數(shù)少,便于參數(shù)整定,能夠滿足控制精度及快速性的要求,并且具有較強(qiáng)的魯棒性、抗干擾性能力以及對非線性強(qiáng)耦合系統(tǒng)的解耦能力。
線性自抗擾控制器;串級控制;線性擴(kuò)張狀態(tài)觀測器;雙旋翼無人機(jī);姿態(tài)控制
PID控制就是靠目的與實(shí)際輸出之間的誤差來決定消除此誤差的控制策略,并不是靠對象的輸入輸出模型來決定控制策略。因此,只要選擇的PID參數(shù)使閉環(huán)穩(wěn)定,就能使一類對象達(dá)到靜態(tài)指標(biāo)。目前,PID控制器在航天控制、運(yùn)動(dòng)控制以及其他過程控制應(yīng)用中,仍然占據(jù)著主導(dǎo)地位。然而,科學(xué)技術(shù)的發(fā)展對控制精度和速度的要求,以及對環(huán)境變化的適應(yīng)能力的要求越來越高,經(jīng)典PID慢慢顯露出它的缺點(diǎn)。為了保留PID控制的優(yōu)點(diǎn),克服它的缺點(diǎn),HAN等[1]在20世紀(jì)80年代研究出了一種控制策略“自抗擾控制技術(shù)”(active disturbance rejection control technique)。自抗擾控制器最突出的特點(diǎn)就是把作用于被控對象的所有不確定因素以及外部擾動(dòng)都?xì)w結(jié)為未知擾動(dòng),然后,用對象的輸入、輸出對它進(jìn)行估計(jì)并給予補(bǔ)償。自抗擾控制器具有響應(yīng)速度快、控制精度高、抗干擾能力強(qiáng)的特點(diǎn),因此,在許多理論研究、試驗(yàn)和工程實(shí)際中得到了廣泛應(yīng)用。但是HAN等[1]的自抗擾控制器是非線性的,導(dǎo)致控制器的參數(shù)眾多,使算法實(shí)現(xiàn)和參數(shù)調(diào)節(jié)變得復(fù)雜。GAO等[2]提出一種線性自抗擾控制器,這種控制器參數(shù)少,便于參數(shù)調(diào)節(jié)和算法實(shí)現(xiàn)。縱列式雙旋翼無人機(jī)的特點(diǎn)是具有前、后2副旋翼,與單旋翼無人機(jī)相比,具有運(yùn)載能力強(qiáng)、運(yùn)輸效率高的優(yōu)點(diǎn),更加適合重型直升機(jī)的構(gòu)造[3]。但是,由于縱列式雙旋翼無人機(jī)的旋翼是前、后布置的,這引起了一系列的空氣動(dòng)力學(xué)、飛行動(dòng)力學(xué)和結(jié)構(gòu)動(dòng)力學(xué)問題,這些問題遠(yuǎn)比單旋翼無人機(jī)的復(fù)雜,相應(yīng)的分析和設(shè)計(jì)技術(shù)難度也比單旋翼無人機(jī)的大。縱列式雙旋翼無人機(jī)是一個(gè)具有6個(gè)自由度和2個(gè)控制輸入的欠驅(qū)動(dòng)系統(tǒng),具有多變量、強(qiáng)耦合、非線性和對擾動(dòng)敏感的特性,而整個(gè)飛行控制的關(guān)鍵就是姿態(tài)控制,目前,相關(guān)的控制方法有模糊自整定PID控制[4]、魯 棒控制[5]、粒子群優(yōu)化神經(jīng)網(wǎng)絡(luò)控制[6]、無靜差跟蹤控制[7]、自適應(yīng)神經(jīng)模糊控制[8]、滑模控制[9]、輸出反饋控制[10?11]等。本文作者針對縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)中欠驅(qū)動(dòng)、多變量、強(qiáng)耦合的控制問題,設(shè)計(jì)串級線性自抗擾控制器,有效地解決了以上控制問題,并經(jīng)過參數(shù)整定,得到良好的控制效果。
1 線性自抗擾控制器的基本原理

1.1 線性跟蹤微分器(LTD)
設(shè)計(jì)跟蹤微分器的目的是給系統(tǒng)輸入安排過渡過程,得到光滑的輸入信號,降低系統(tǒng)初始誤差。
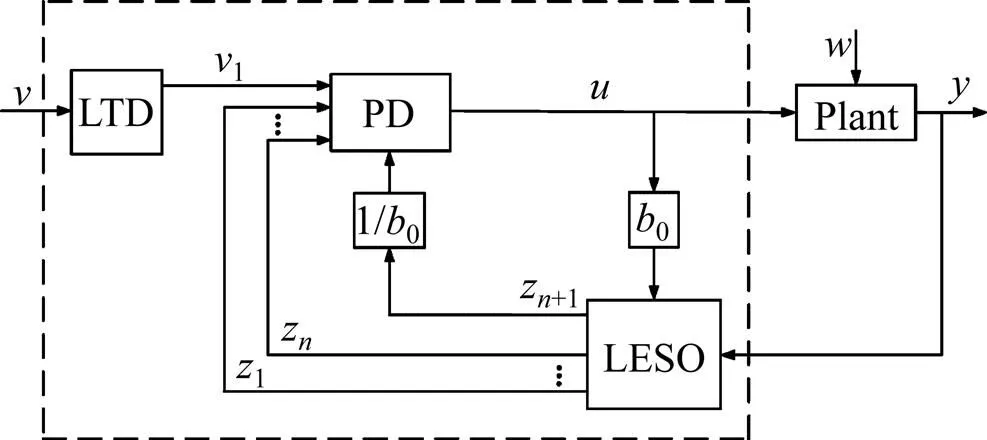
圖1 線性自抗擾控制器
以二階系統(tǒng)為例,連續(xù)形式的線性跟蹤微分器算法為
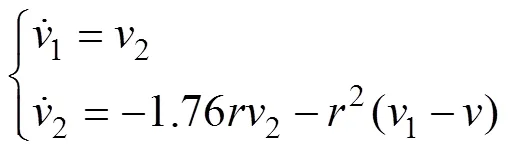
式中:為跟蹤微分器的輸入信號變量;1為的跟蹤信號變量;2為輸入的微分信號變量;為決定跟蹤速度的參數(shù)。
1.2 線性擴(kuò)張狀態(tài)觀測器(LESO)
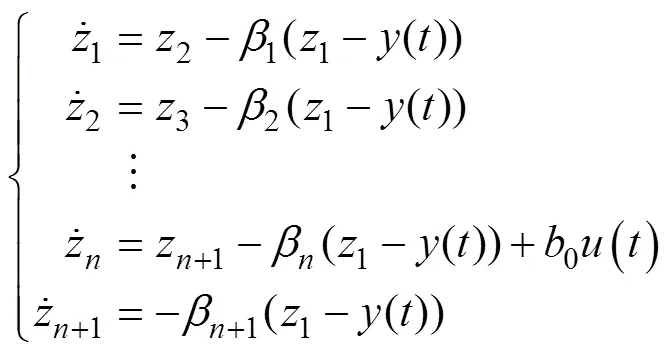
擴(kuò)張狀態(tài)觀測器除系統(tǒng)自身的狀態(tài)外,還將系統(tǒng)模型自身的不確定性和系統(tǒng)外部擾動(dòng)作為總擾動(dòng),擴(kuò)張出另一個(gè)狀態(tài)。通過觀測器估算總擾動(dòng),并加到控制器中進(jìn)行補(bǔ)償,這樣就能使原來的非線性控制系統(tǒng)變成線性的積分器串聯(lián)控制系統(tǒng)。上述動(dòng)態(tài)估計(jì)補(bǔ)償總擾動(dòng)的技術(shù),便是自抗擾控制技術(shù)的最核心技術(shù)。
連續(xù)形式的線性擴(kuò)張狀態(tài)觀測器算法為

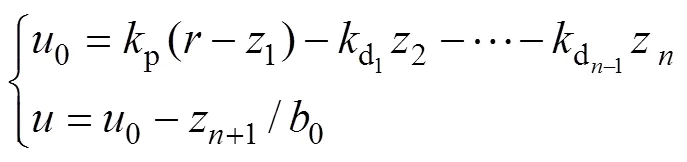
1.3 線性誤差控制律
用LESO進(jìn)行動(dòng)態(tài)補(bǔ)償之后,系統(tǒng)變成積分器串聯(lián)控制系統(tǒng),因此,只需采用較為簡單的線性PD控制律就可以達(dá)到控制目的,線性誤差控制律算法為

2 串級線性自抗擾控制器的設(shè)計(jì)
2.1 二階n級串級線性自抗擾控制器的設(shè)計(jì)
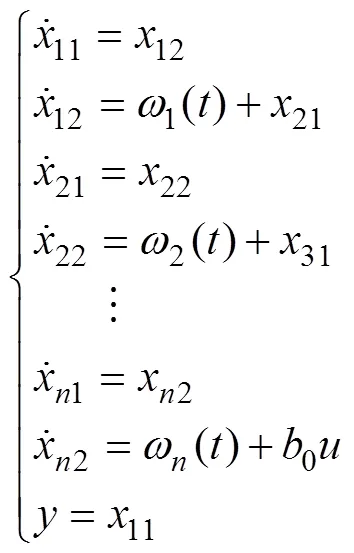
設(shè)有個(gè)串聯(lián)的二階被控對象,即

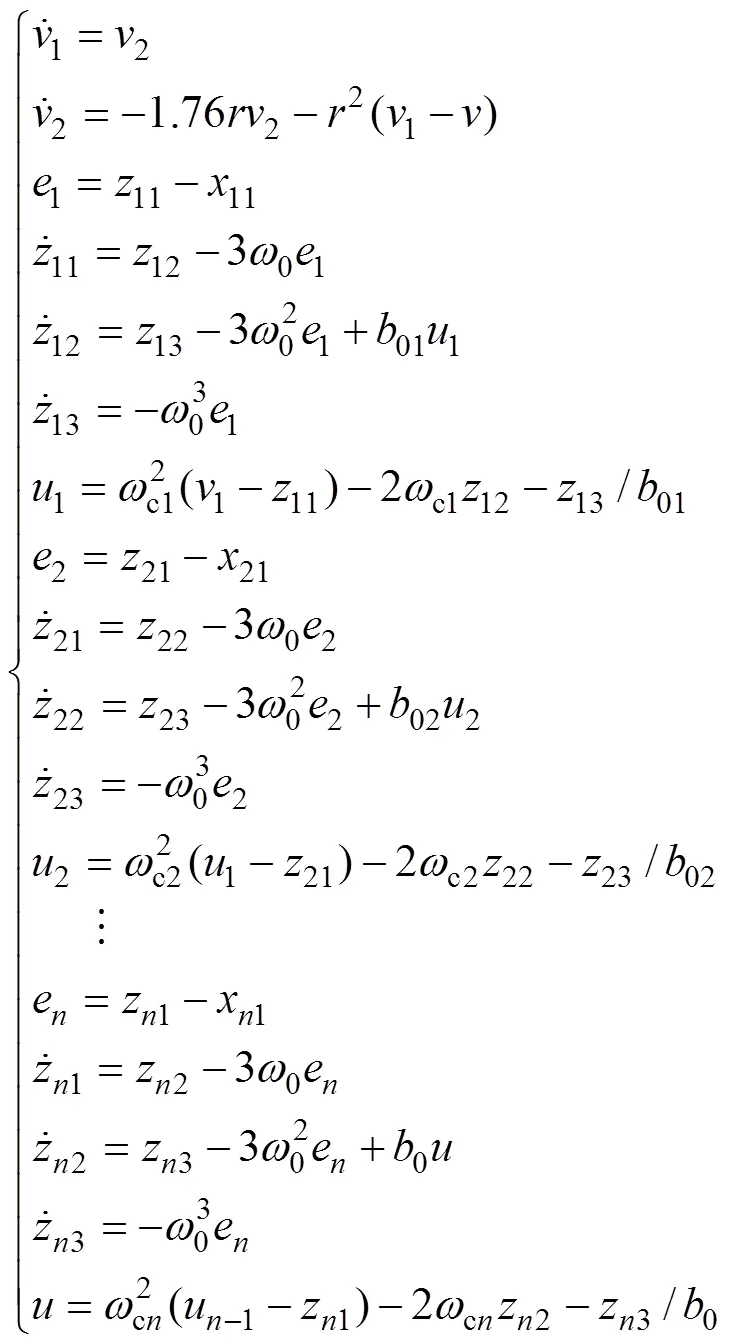
式中:,,…,為系統(tǒng)中的未知擾動(dòng),控制目的是讓x1跟蹤事先設(shè)定好的期望軌跡,讓真實(shí)控制量u驅(qū)動(dòng)xn,xn驅(qū)動(dòng)xn?1,直到x2驅(qū)動(dòng)x1達(dá)到控制目標(biāo)為止。設(shè)x2為虛擬控制量u1,x3為虛擬控制量u2,以此類推,xn為虛擬控制量un?1,用自抗擾控制器來確定讓x1跟蹤目標(biāo)v(t)的控制量u1,然后以u1為期望軌跡,對式(6)中第2式用自抗擾控制器來確定讓狀態(tài)x2跟蹤u1的控制量u2,直到確定出真實(shí)控制量u為止。按照這個(gè)設(shè)計(jì)思想,二階n級串級線性自抗擾控制器結(jié)構(gòu)圖如圖2所示。
將式(6)展開,即
2.2 二階2級串級線性自抗擾控制器的設(shè)計(jì)與仿真
設(shè)有2個(gè)串聯(lián)的二階被控對象如下式所示:

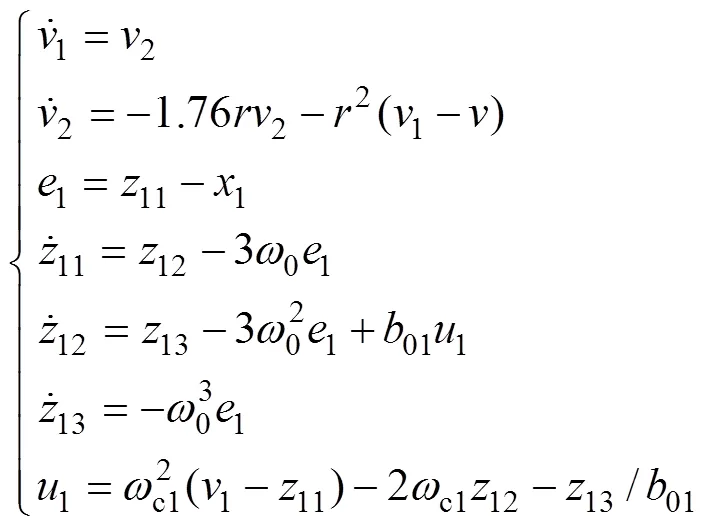
得到虛擬控制量1,以此作為3的期望軌跡。二階LADRC2的控制算法為

將二階LADRC1和二階LADRC2串聯(lián)起來就是2個(gè)串聯(lián)的二階被控對象的串級自抗擾控制器,其結(jié)構(gòu)圖如圖3所示。
3 串級LADRC在雙旋翼無人機(jī)飛行姿態(tài)控制中的應(yīng)用
3.1 縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)的模型
縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)[12?14]的結(jié)構(gòu)示意圖如圖6所示。
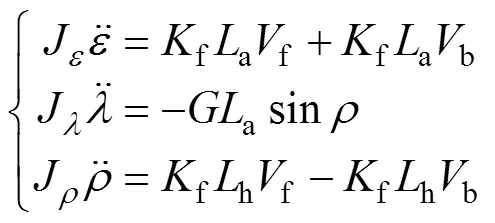
縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)[14?16]的數(shù)學(xué)模型為
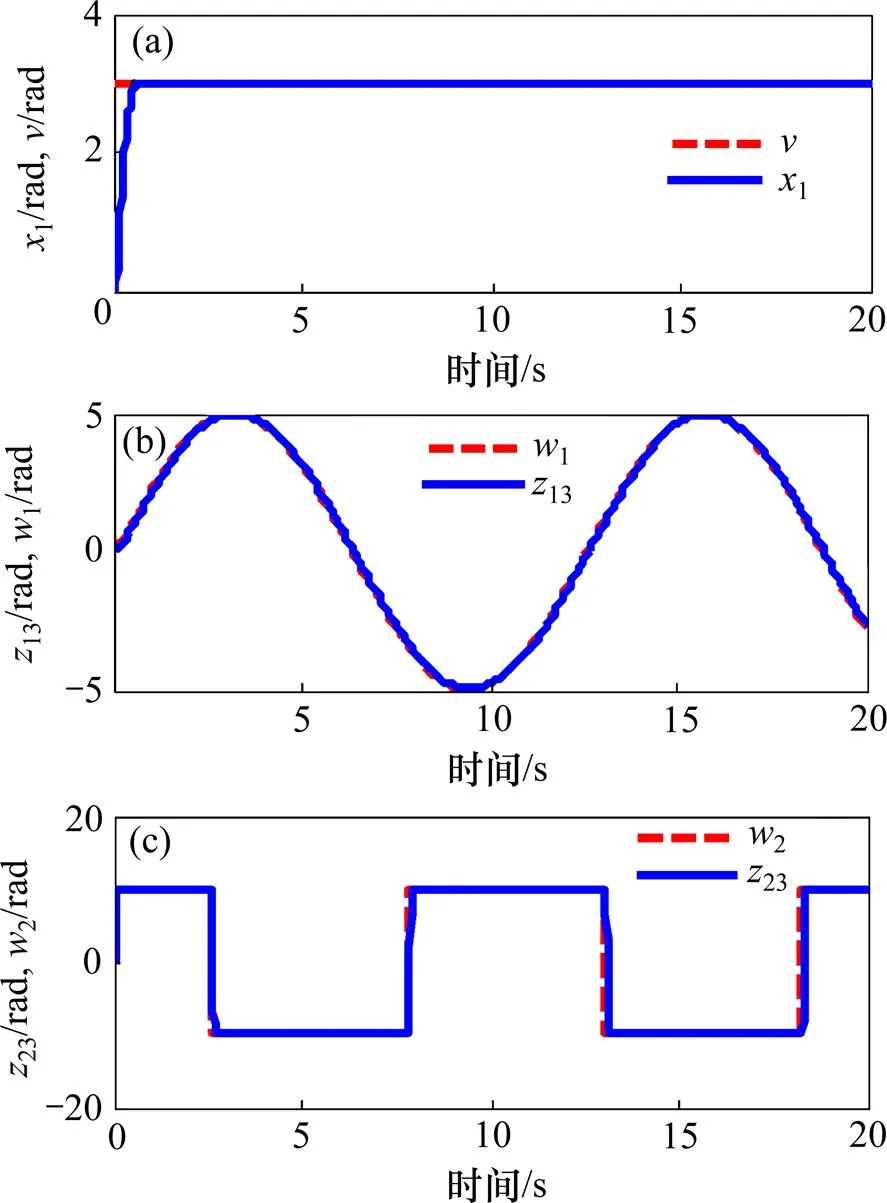
圖4 LADRC仿真結(jié)果
Fig. 4 Simulation results of LADRC
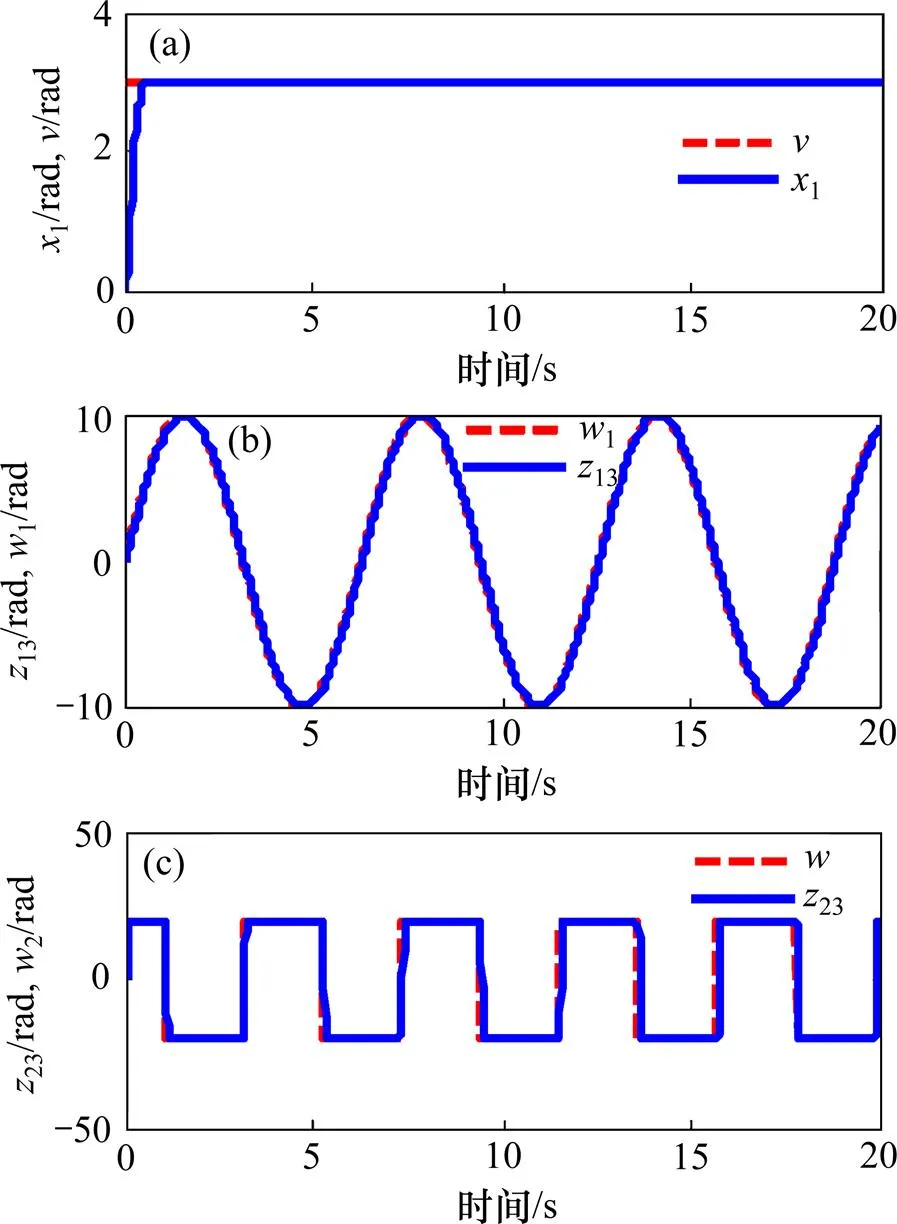
圖5 二階2級串級LADRC仿真結(jié)果
Fig. 5 Simulation results of second order second level cascade LADRC
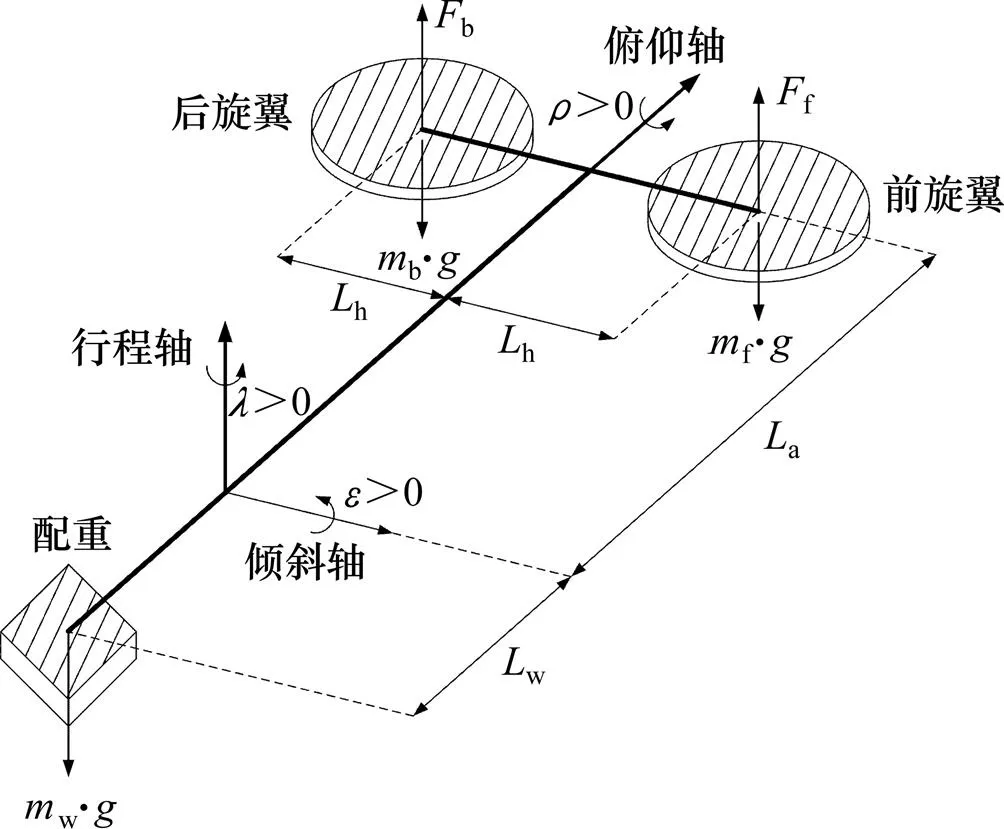
圖6 縱列式雙旋翼無人機(jī)姿態(tài)控制系統(tǒng)結(jié)構(gòu)示意圖
3.2 串級LADRC的設(shè)計(jì)
分析雙旋翼無人機(jī)姿態(tài)控制模型可知,首先,要對模型進(jìn)行解耦,設(shè)虛擬控制量1和2,雙旋翼無人機(jī)模型改寫成

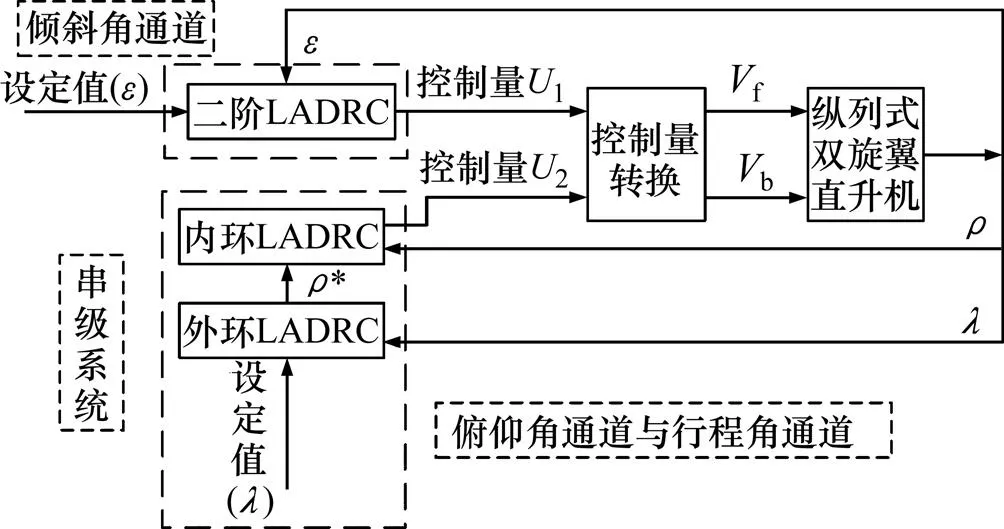
圖7 雙旋翼無人機(jī)姿態(tài)控制框圖
傾斜角通道線性誤差控制律算法如下:

俯仰角通道和行程角通道的串級系統(tǒng)線性誤差控制律算法如下:

通過自抗擾控制器可以得到虛擬控制量1和2,然后通過控制量轉(zhuǎn)換可以獲得電機(jī)的真實(shí)控制輸入量f和b,控制量轉(zhuǎn)換如下:
4 縱列式雙旋翼無人機(jī)飛行姿態(tài)控制仿真
根據(jù)前面所述的設(shè)計(jì)方法設(shè)計(jì)串級線性自抗擾控制器,并在MATLAB環(huán)境下進(jìn)行無人機(jī)飛行姿態(tài) 仿真。
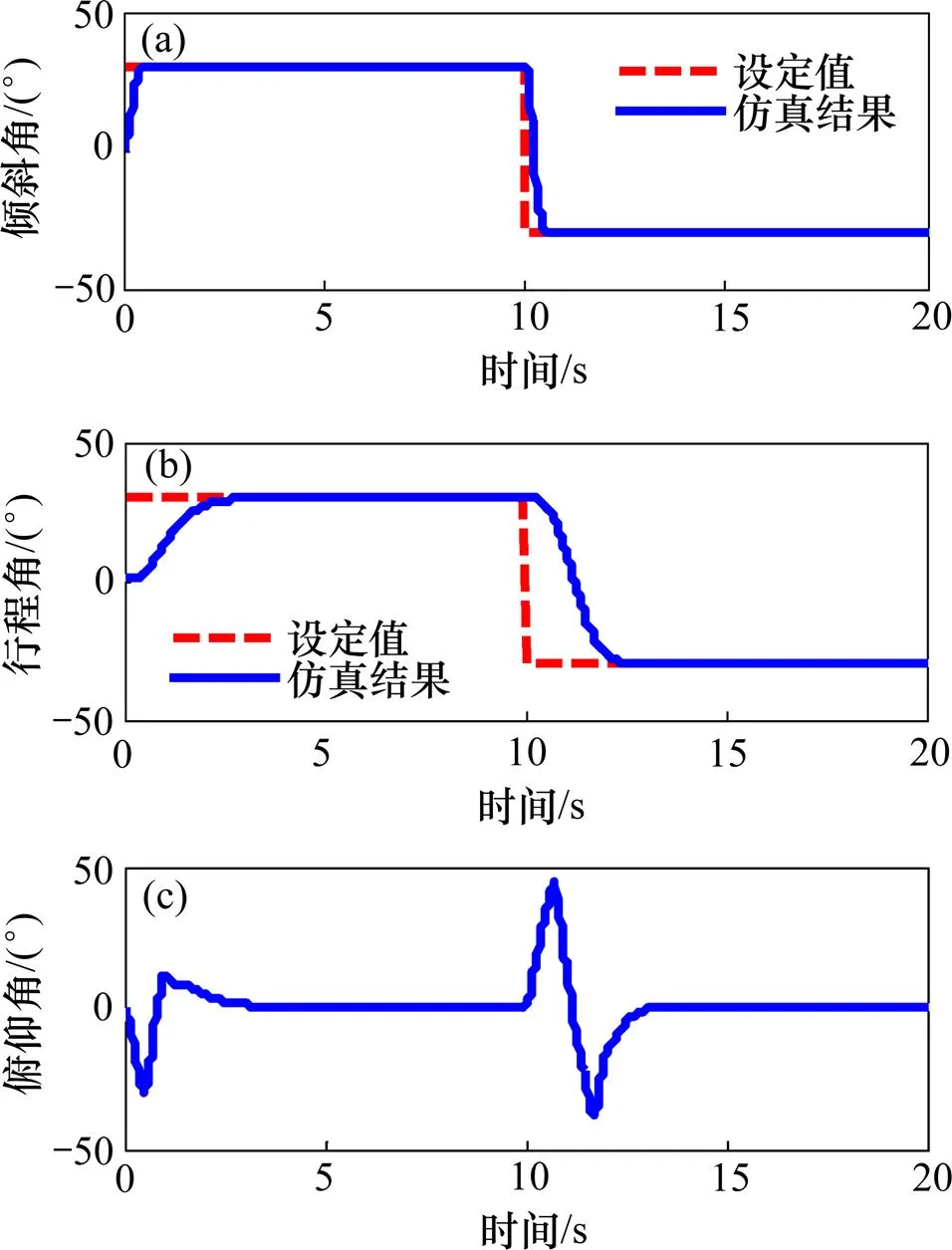
(a) 傾斜角;(b) 行程角;(c) 俯仰角
Fig, 8 Results of simulation (no disturbances)
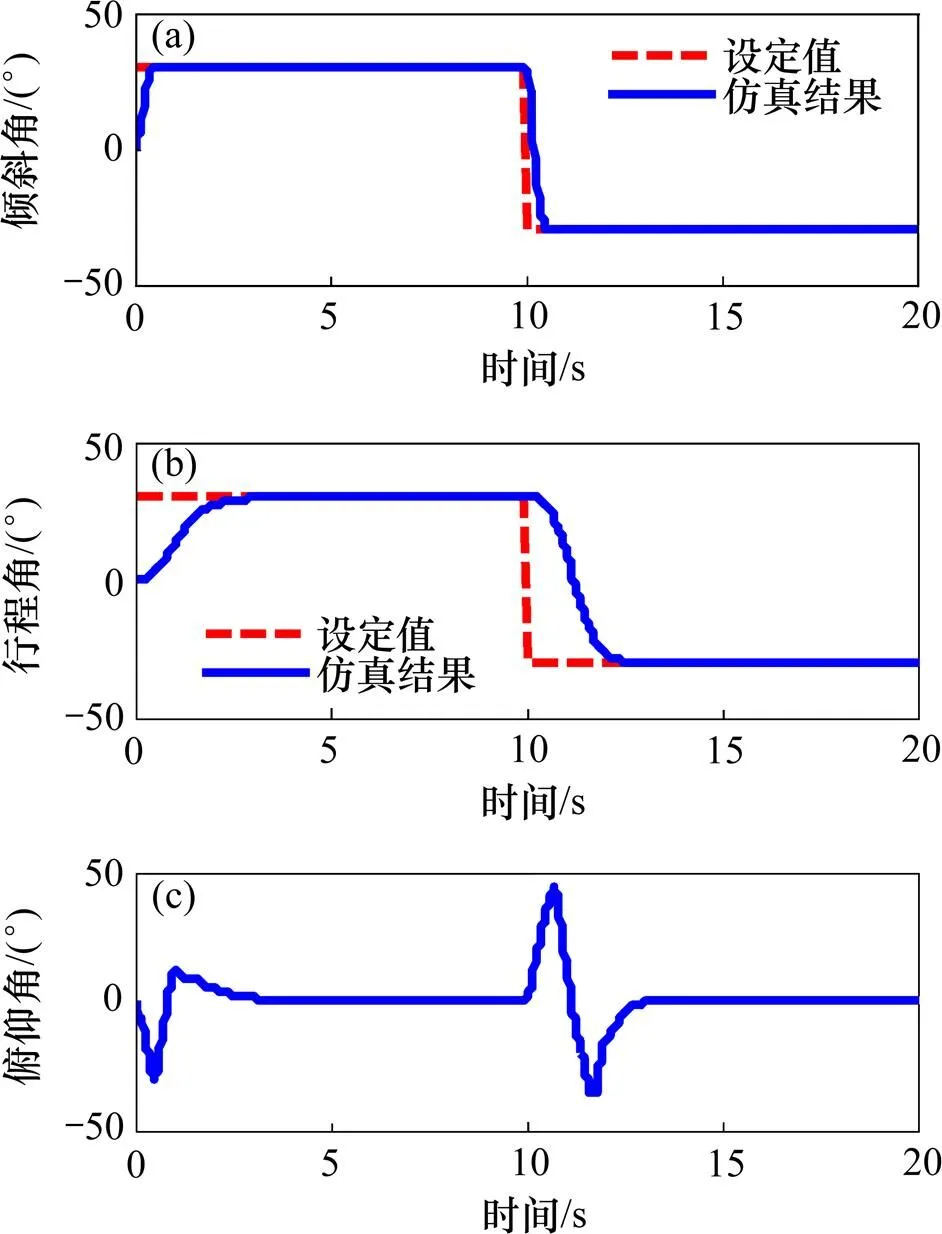
(a) 傾斜角;(b) 行程角;(c) 俯仰角
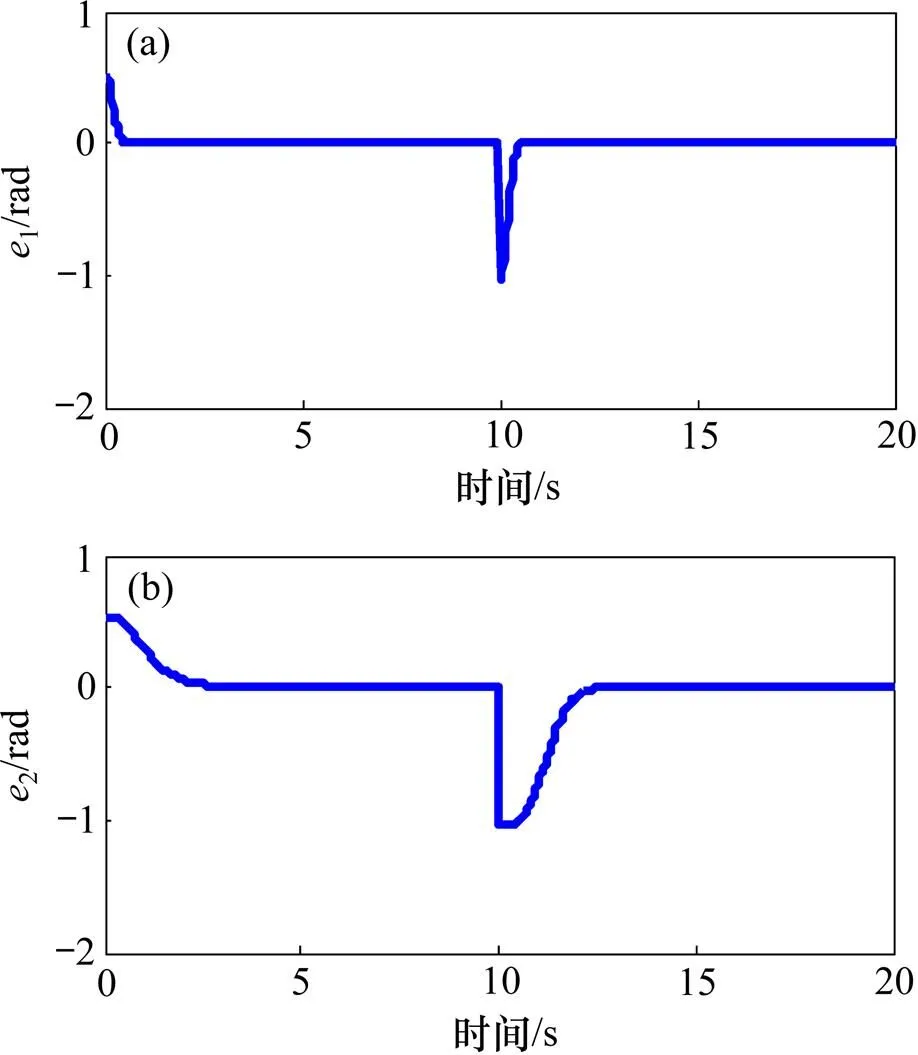
(a) 傾斜角的輸入輸出相對誤差;(b) 行程角的輸入輸出相對誤差
(a) 對擾動(dòng)1的觀測;(b) 對擾動(dòng)2的觀測
5 結(jié)論
1) 采用跟蹤微分器可以得到準(zhǔn)確的設(shè)定值微分信號,并且可以給系統(tǒng)輸入安排過渡過程,得到光滑的輸入信號,降低系統(tǒng)初始誤差。
2) 采用擴(kuò)張狀態(tài)觀測器可以獲得系統(tǒng)總擾動(dòng)的估計(jì)值,并將其補(bǔ)償?shù)娇刂破髦校上龜_動(dòng)對系統(tǒng)的影響,提高系統(tǒng)的魯棒性和抗干擾能力。
3) 采用虛擬控制量將系統(tǒng)改為串級控制,簡化了控制器的設(shè)計(jì)過程。
4) 串級線性自抗擾控制器參數(shù)少、易整定、設(shè)計(jì)簡單,能夠解決雙旋翼無人機(jī)姿態(tài)控制中非線性、強(qiáng)耦合以及對擾動(dòng)敏感等控制問題,滿足工程實(shí)際的需要,是一種非常有效的控制方法。
[1] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900?906.
[2] GAO Zhiqing. Scaling and bandwidth-parameterization based controller tuning[C]// Proceedings of the 2003 American Control Conference. Denver. America: IEEE, 2003: 4989?4996.
[3] 張亞飛. 縱列式直升機(jī)飛行動(dòng)力學(xué)建模及平衡、穩(wěn)定性和操縱性計(jì)算[D]. 南京: 南京航空航天大學(xué)航空航天學(xué)院, 2009: 1?30. ZHANG Yafei. A mathematical model of tandem helicopter flight dynamics and calculating on the trim, stability and handling quality[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. School of Aerospace Engineering, 2009: 1?30.
[4] 葛金來, 張承慧, 崔納新. 模糊自整定PID控制在三自由度直升機(jī)實(shí)驗(yàn)系統(tǒng)中的應(yīng)用[J]. 信息與控制, 2010, 39(3): 342?347. GENG Jinlai, ZHANG Chenghui, CUI Naxin. Fuzzy self-tuning PID controller in the 3-DOF helicopter experimental system[J]. Information and Control, 2010, 39(3): 342?347.
[5] 胡悅. 基于魯棒控制的三自由度直升機(jī)半實(shí)物仿真實(shí)驗(yàn)[J]. 兵工自動(dòng)化, 2016, 35(1): 72?74. HU Yue. Semi physical simulation experiment of three DOF helicopter based on robust control[J]. Ordnance Industry Automation, 2016, 35(1): 72?74.
[6] 王顯博. 基于三自由度直升機(jī)模型的粒子群優(yōu)化神經(jīng)網(wǎng)絡(luò)控制算法研究[D]. 哈爾濱: 哈爾濱理工大學(xué)自動(dòng)化學(xué)院, 2016: 1?50. WANG Xianbo. Research on the particle swarm optimization neural net control based on three-DOF helicopter model[D]. Harbin: Harbin University of Science and Technology. School of Automation, 2016: 1?50.
[7] 岳新成, 楊瑩, 耿志勇. 三自由度直升機(jī)模型的無靜差跟蹤控制[J]. 系統(tǒng)仿真學(xué)報(bào), 2007, 19(18): 4279?4283. YUE Xincheng, YANG Ying, GENG Zhiyong. No steady-state error tracking control of 3-DOF experimental helicopter system[J]. Journal of System Simulation, 2007, 19(18): 4279?4283.
[8] 武俊峰, 賈婧媛. 三自由度直升機(jī)模型自適應(yīng)神經(jīng)模糊控制[J]. 哈爾濱理工大學(xué)學(xué)報(bào), 2015, 20(2): 35?40. WU Junfeng, JIA Jingyuan. Research on adaptive neural fuzzy control of 3-DOF helicopter model[J]. Journal of Harbin University of Science and Technology, 2015, 20(2): 35?40.
[9] WITT J, BOONTO S, WERNER H. Proximate model predictive control of a 3-DOF helicopter[C]// Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, USA: IEEE, 2007: 4501?4506.
[10] KUTAY A T, CALISE A J, IDAN M. Experimental results on adaptive output feedback control using a laboratory model helicopter[J]. IEEE Transactions on Control Systems Technology, 2005, 13(2): 196?202.
[11] KIEFER T, KUGI A, GRAICHEN K. Feedforward and feedback tracking control of a 3DOF helicopter Experiment under input and output constrains[C]// Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, USA: IEEE, 2006: 1586?1593.
[12] LIU Hao, LU Geng, ZHONG Yisheng. Robust LQR attitude control of a 3-DOF laboratory helicopter for aggressive maneuvers[J]. IEEE Transactions on Industrial Electronics, 2013, 60(10): 4627?4636.
[13] 胡春華, 朱紀(jì)洪, 孫增圻. 縱列式無人直升機(jī)建模及其精確線性化方法研究[J]. 控制與決策, 2004, 19(9): 1074?1077. HU Chunhua, ZHU Jihong, SUN Zenqi. Modeling and exact linearization for an unmanned tandem helicopter[J]. Control and Decision, 2004, 19(9): 1074?1077.
[14] 陳增強(qiáng), 李毅, 袁著祉, 等. 串級自抗擾控制器在縱列式雙旋翼直升機(jī)飛行姿態(tài)控制中的應(yīng)用[J]. 控制理論與應(yīng)用, 2015, 32(9): 1219?1225. CHEN Zengqiang, LI Yi, YUAN Zhuzhi, et al. Attitude control of tandem rotor helicopter based on cascade active disturbance rejection control[J]. Control Theory & Application, 2015, 32(9): 1219?1225.
[15] ZHU Bo, LIU Hongtao, LI Zhan. Robust distributed attitude synchronization of multiple three-DOF experimental helicopter[J]. Control Engineering Practice, 2015, 36(1): 87?99.
[16] 唐光輝, 侍洪波. 三自由度直升機(jī)模型魯棒控制器設(shè)計(jì)[J]. 華東理工大學(xué)學(xué)報(bào)(自然科學(xué)版), 2010, 36(5): 105?111. TANG Guanghui, SHI Hongbo. Robust controller design for 3-DOF helicopter model[J]. Journal of East China University of Science and Technology(Natural Science Edition), 2010, 36(5): 105?111.
[17] WANG Xiuyan, ZHAO Changli, LI Zongshuai. Robust H-infinity tracking control of 3-DOF helicopter model[C]// Proceedings of 2010 International Conference on Measuring Technology and Mechatronics Automation. Changsha, China: IEEE, 2010: 279?282.
[18] GAO Weinan, FANG Zheng. Adaptive integral backstepping control for a 3-DOF helicopter[C]// Proceedings of 2012 IEEE International Conference on Information and Automation. Shenyang, China: IEEE, 2012: 190?195.
[19] 鄭博, 鐘宜生. 一類Quanser直升機(jī)的魯棒姿態(tài)調(diào)節(jié)器設(shè)計(jì)[J]. 清華大學(xué)學(xué)報(bào)(自然科學(xué)版), 2011, 51(3): 323?327. ZHENG Bo, ZHONG Yisheng. Robust attitude regulator design for a class of Quanser helicopter[J]. Journal of Tsinghua University(Natural Science Edition), 2011, 51(3): 323?327.
[20] BORIS A, DIMITRI P, ALEXANDER L. Adaptive control of 3-DOF motion for LAAS helicopter benchmark: design and experiments[C]// Proceedings of the 2007 American Control Conference. New York, USA: IEEE, 2007: 3312?3317.
Attitude control of tandem rotor UAV based on cascade linear active disturbance rejection control
ZHANG Yong1, CHEN Zengqiang1, ZHANG Xinghui2, SUN Qinglin1, SUN Mingwei1
(1. School of Computer and Control Engineering, Nankai University, Tianjin 300350, China;2. Tianjin Sino-German University of Applied Sciences, Tianjin 300350, China)
The structures of the linear active disturbance rejection controller(LADRC) and cascade linear active disturbance rejection controller were described in detail, including linear tracking differentiator, linear extended state observer and linear error control law. And the typical algorithms of the each part were given as well. In order to solve the control problems of under-actuated, multivariable and strong coupling in tandem rotor UAV attitude control system, the cascade linear active disturbance rejection controller was designed. The results show that the cascade LADRC has fewer parameters and is convenient for parameter setting, it can meet the requirement of control accuracy and rapidity, and it also has strong robustness, anti-disturbance ability and decoupling ability.
linear active disturbance rejection controller(LADRC); cascade control; linear extended state observer; tandem rotor UAV; attitude control
TP273
A
1672?7207(2019)03?0564?08
10.11817/j.issn.1672-7207.2019.03.009
2018?04?25;
2018?06?17
國家自然科學(xué)基金資助項(xiàng)目(61573197,61573199) (Projects(61573197, 61573199) supported by the National Natural Science Foundation of China)
陳增強(qiáng),教授,博士生導(dǎo)師,從事智能預(yù)測控制、自抗擾控制研究;E-mail: Chenzq@nankai.edu.cn
(編輯 劉錦偉)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17