基于UG運動仿真的門鎖和手柄行程匹配方法
2019-04-22 07:29:34李火德隆彩云
裝備制造技術 2019年1期
關鍵詞:測量
李火德,隆彩云,李 佳
(柳州五菱汽車工業有限公司,廣西 柳州545007)
0 引言
車門開閉系統主要包括外開手柄、內開手柄和門鎖,是車門附件中極其重要的一部分。它對車門的正常關閉、防盜和安全性等都有極為重要的作用。如果手柄行程設計不合理將會影響車門的開閉性能,造成客戶報怨,影響品牌美譽。本文簡述了利用UG運動仿真功能進行門鎖和手柄行程匹配的方法。
1 車門鎖系統
車門鎖系統主要由車門鎖體、外開手柄、內開手柄、內鎖止和鎖扣等模塊組成(圖1)。車門鎖各模塊的連接大多采用拉桿或拉線形式。門鎖和手柄的行程匹配是設計的關鍵。
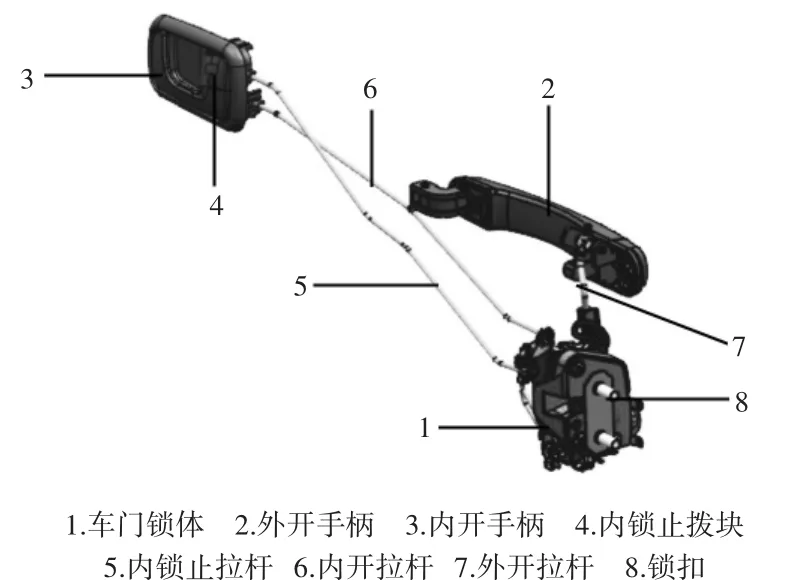
圖1 車門鎖系統
因為內開手柄驅動門鎖的運動仿真與外開手柄驅動門鎖的運動仿真原理一樣,本文僅以外開手柄與門鎖的運動仿真為例。
外開手柄解鎖運動過程為:拉動手柄—手柄撥桿轉動—外開拉桿下移—解鎖撥塊轉動—拉板下移—聯軸板轉動—棘爪解鎖,如圖2所示。
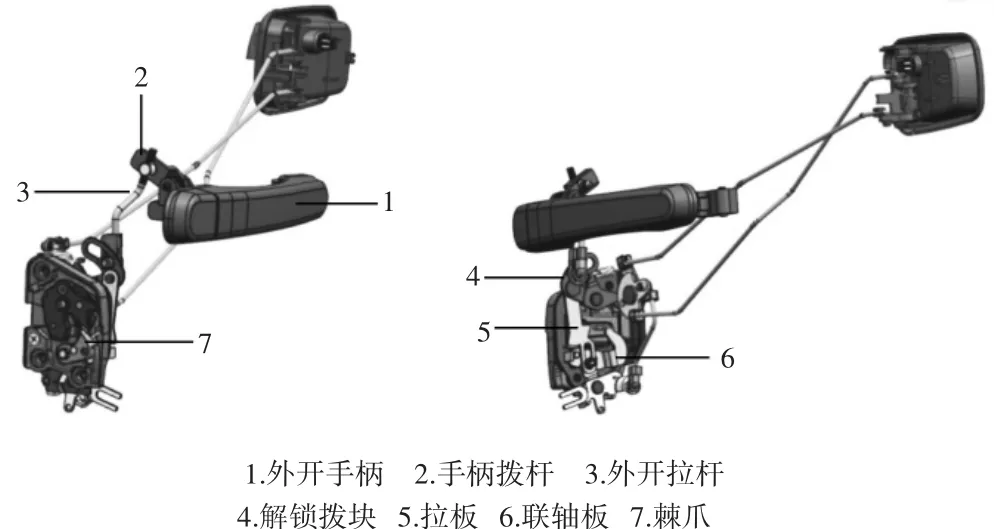
圖2 整理后的車門鎖系統數模
2 UG運動仿真門鎖和手柄行程模擬方法
2.1 創建連桿
(1)將外開手柄的支座部分設為固定連桿L001,拉手部分設為連桿L002,撥桿部分設為連桿L003,拉桿、連接頭部分設為連桿L004,見圖3。
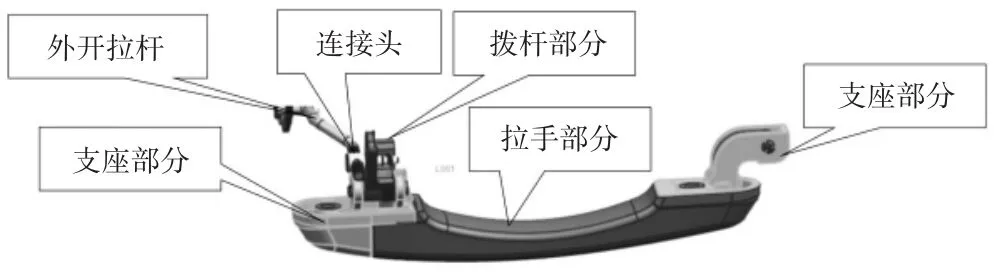
圖3 外開手柄
(2)將鎖體的解鎖撥塊部分設為連桿L005,拉板、連接軸部分設為連桿L006,座體、面板部分設為固定連桿L007,聯軸板、軸、棘爪部分設為連桿L008,見圖 4。
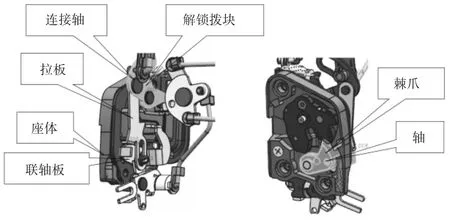
圖4 鎖體
2.2 創建運動副
分別對連桿 L002、L003、L005、L008 創建旋轉副;對連桿L004創建嚙合連桿為L003的旋轉副,對連桿L006創建嚙合連桿為L005的旋轉副。
2.3 創建3D接觸或彈簧
(1)把手柄撥桿和拉手、連接頭和解鎖撥塊、拉板和鎖定板接頭、棘爪和限位塊、聯軸板和拉板分別設置為3D接觸。
(2)在連桿L005和固定連桿L007之間(即原彈簧位置)創建彈簧S001,在連桿L008和固定連桿L007之間(即原彈簧位置)創建彈簧S002。
2.4 建立運動測量點
(1)選擇手柄撥桿、手柄支座之間的可能接觸面,建立測量Me001(見圖5),測量其最小距離,當測量值為0時,表示手柄撥桿與手柄支座開始干涉,外開手柄不能再往外運動,該位置的為手柄最大行程位置。
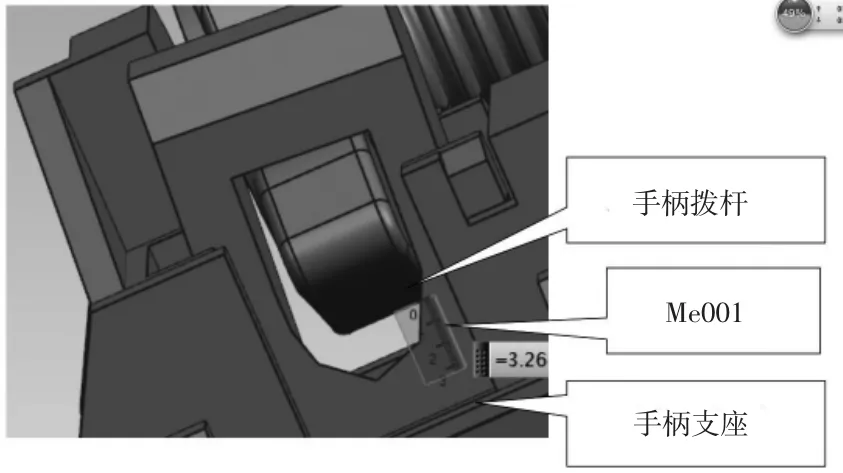
圖5 測量Me001
(2)選擇棘爪、門鎖座體之間的可能接觸面,建立測量Me002(見圖6),測量其最小距離,當測量值為0時,表示棘爪與門鎖座體開始干涉,棘爪不能再轉動,表示鎖體最大行程位置。
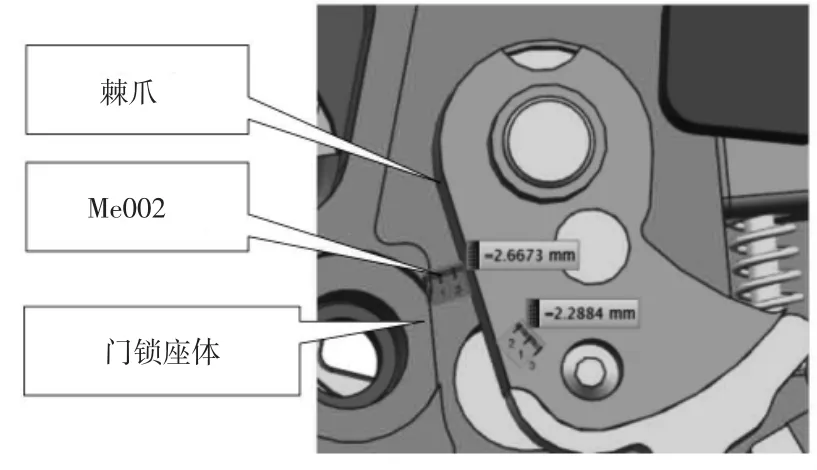
圖6 測量Me002
(3)選擇聯軸板軸、門鎖座體之間的可能接觸面,建立測量Me003(見圖7),測量其最小距離,當測量值為0時,表示聯軸板軸與門鎖座體開始干涉,門鎖聯軸板不能再轉動,表示鎖體最大行程位置。
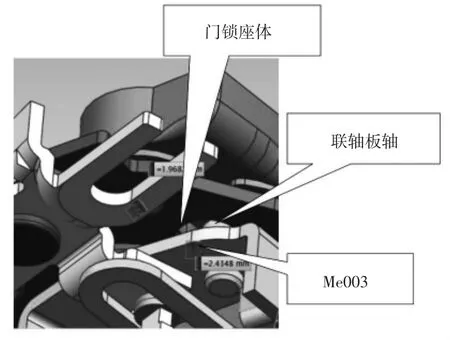
圖7 測量Me003
(4)選擇棘爪、鎖舌轉軸,建立測量Me004(見圖8),測量其最小距離;測量值減去鎖舌遠端到鎖舌轉軸的距離值,當差值為0時,表示棘爪與鎖舌分離,鎖體解鎖。
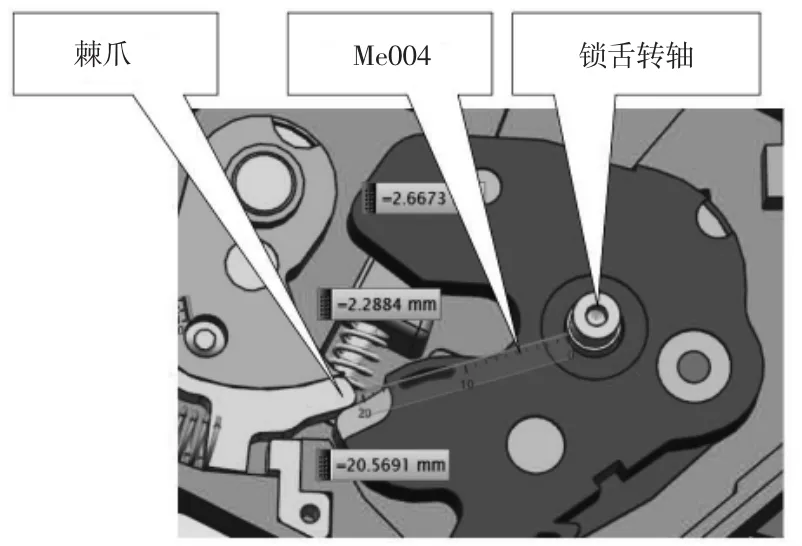
圖8 測量Me004
(5)選擇手柄、手柄支座上的曲面,建立測量Me005(見圖9),測量其最小距離;測量值減去初始位置的距離,即為外開手柄拉出行程。
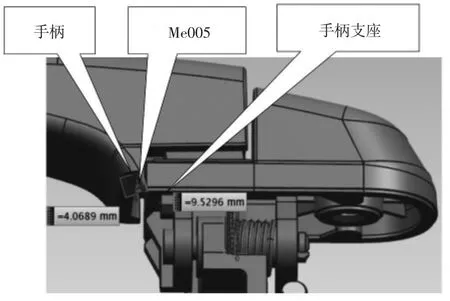
圖9 測量Me005
(6)選擇拉板、聯軸板之間的可能接觸面,建立測量Me006(見圖10),測量其最小距離,當測量值為0時,該位置的對應的拉手行程為空行程。
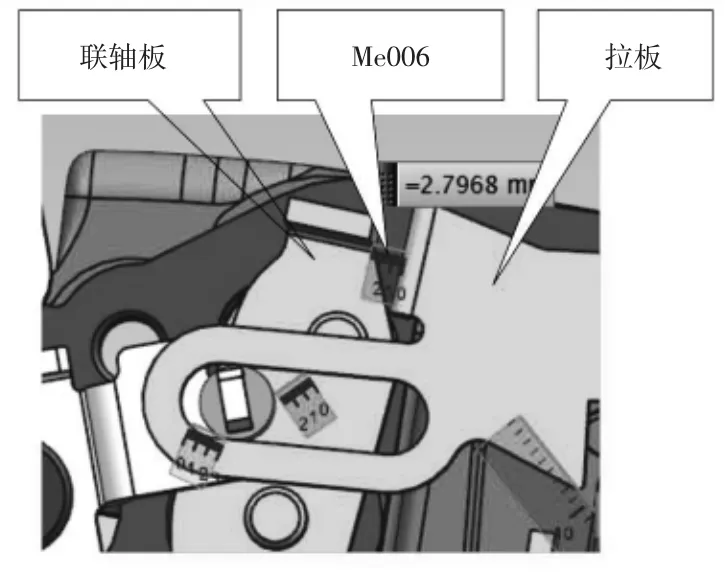
圖10 測量Me006
(7)在手柄撥桿中心建兩個智能點,將其中一個智能點加入連桿L003,建立測量Me007(見圖11),測量這兩個智能點的最小距離,即為外開拉桿手柄端連接頭處行程。
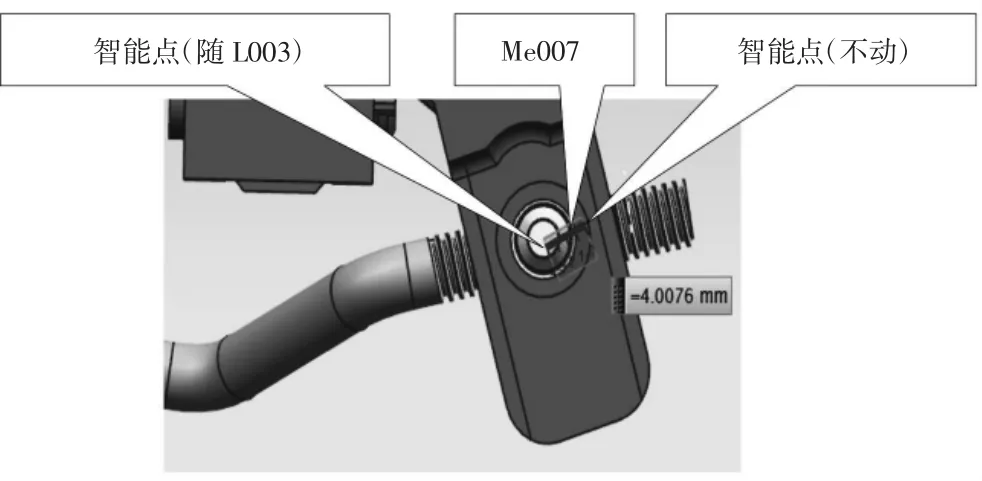
圖11 測量Me007
2.5 仿真數據整理
(1)將J002旋轉副設為“驅動對象”,將運動類型設為“恒定”,將初速度設為0.1。
(2)建立解算方案,將時間設為100,將步數設為1000,對解算方案求解。
(3)進行運動演示,演示結束后,把測量數據保存為txt文本格式,再把文本數據導入Excel表格進行處理。
(4)整理后的數據截圖如圖12所示,可以得到外開手柄上對應的各個行程:外開空行程(2.3 mm),解鎖行程(6.7 mm),鎖體全行程(10.7 mm),手柄全行程(18.2 mm)。
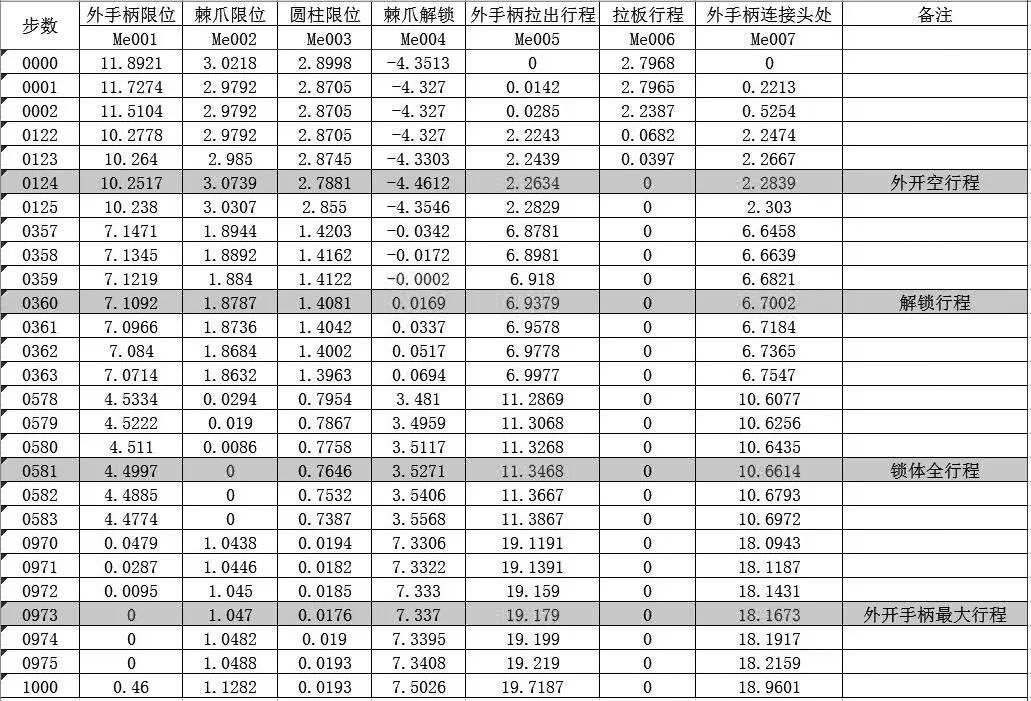
圖12 整理后的數據
3 門鎖和手柄行程匹配方法
門鎖和手柄行程匹配時,首先應滿足的規則是:門鎖解鎖行程<手柄全行程<鎖體全行程,在考慮了制造誤差的基礎上,內、外開手柄在門鎖解鎖后還應有3~5 mm的富余行程(以a代表)。為減少內、外開手柄對門鎖造成碰撞,門鎖在內、外開手柄達到全行程后還應有2~5 mm的富余行程(以b代表)。門鎖和外開手柄的行程匹配關系如圖13[1]。
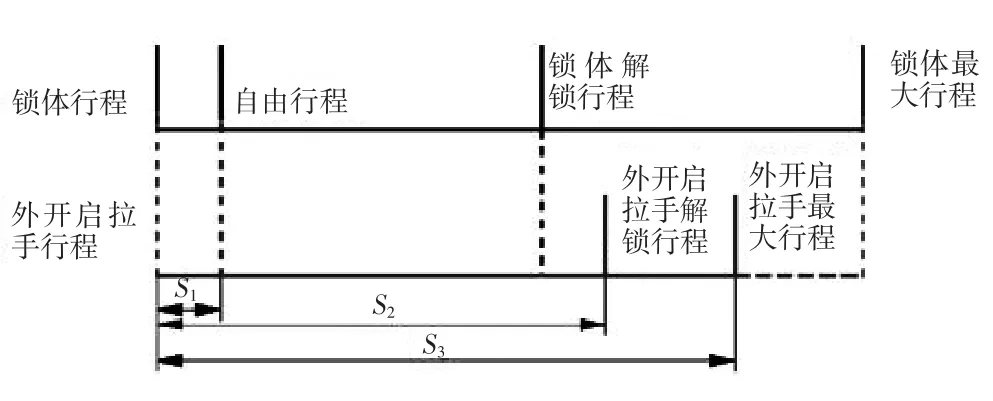
圖13 門鎖和外開手柄行程關系
行程匹配方法:通過上述第3章的UG運動仿真分析,得到外開空行程(S1)、解鎖行程(S2)、手柄全行程(S3)、鎖體全行程(S4)。考慮到拉桿公差,取拉桿公差值上偏差為2 mm(如果供應商的制造精度高則可以取1 mm)[2],則理論上外開手柄全行程S3=S2+2+a,a=S3-S2-2;鎖體全行程 S4=S3+b,b=S4-S3。把仿真結果 S3、S2、S4代入公式計算 a、b值,若 a值在3~5 mm范圍內、且b值在2~5 mm范圍內,則表示門鎖和手柄的行程匹配,否則需調整手柄和拉手,以達到與門鎖行程匹配。
同理,可以進行門鎖和內開手柄的行程匹配設計。
把第3章的仿真值代入上述公式計算,得到a=9.5 mm,b=-7.5 mm,門鎖與手柄行程不匹配,需對手柄及拉桿重新匹配設計。
4 結束語
通過UG運動仿真模擬出門鎖解鎖過程,將解鎖過程的各行程轉換到手柄的行程上,再通過數據分析,并考慮制造誤差影響,保證了門鎖和手柄行程匹配,提高車門鎖系統各模塊布置和行程匹配的設計合理性,減少試制階段對車門鎖系統各模塊的更改次數,達到了降低設計風險、節約開發成本的目的。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00