異光譜卡氏非共軸攝遠光學系統畸變的校正
2019-04-25 07:35:10劉健白東陽王曉曼景文博
長春理工大學學報(自然科學版) 2019年2期
劉健,白東陽,王曉曼,景文博
(1.長春理工大學 電子信息工程學院,長春 130022;2.長春理工大學 光電工程學院,長春 130022)
攝遠光學系統[1]具有長焦距,小視場等特點,但是會導致體積變大。本文中的攝遠光學系統基于卡塞格林系統設計的,滿足以上要求,并且可見光相機和近紅外相機共用一部分光學系統,具有小體積,靈活性強等優點。但是卡塞格林系統應用在攝遠光學系統中會引入較大的像差,使可見光圖像、近紅外圖像產生畸變,為了減小本攝遠光學系統的測量誤差,首要是去除圖像畸變,從根本上去除攝遠光學系統的像差。
隨著攝像機畸變校正技術的發展,在生產中張正友相機標定法[2]被廣泛應用于單個大視場短焦距攝像機畸變校正。在單視點折反射相機標定領域,傳統方法有:理想情況下的直接線性變換(DLT)法;考慮了徑向崎變的Tsai兩步標定法[3];考慮了切向畸變的 Weng 等人的迭代法;Martins[4]提出的雙平面模型法等;中國科學院的孟曉橋、胡占義[5-6]教授在相機自標定方法中提出更具穩定性的基于曲線擬合的圓形標定法;吳毅紅教授提出的應用更廣泛的平行圓平面標定法等都對攝像機的標定技術做出了巨大貢獻。
攝遠光學系統存在的系統畸變,關鍵在于不共軸的兩個相機,光譜范圍不同,實現攝遠光學系統的校正是依據空間環境中物體的幾何信息與圖像信息之間的關系得到的成像模型,并且通過成像模型得到理想無畸變圖像,攝遠光學系統校正要涉及畸變校正模型的構建和攝像機校正方法的選擇。畸變校正模型一般可以分為兩大類:線性模型和非線性模型,線性模型不考慮光學系統畸變,簡單快速,但精度低;非線性模型引入畸變參數從而使校正精度提高,但是對于本攝遠光學系統適用性較低,計算繁瑣,速度慢。考慮到在應用領域中基于卡塞格林系統設計的不共軸的兩種波長范圍攝遠光學系統的高精度的測量要求,本文提出了一種異光譜卡氏非共軸攝遠光學系統的校正方法。全面地考慮了攝遠光學系統的各個參數。
1 雙色卡氏非共軸攝遠光學系統校正
1.1 構建校正模型
在構建攝遠光學系統校正模型前,這里對該系統結構做簡單說明。光學系統結構簡圖如圖1,由卡塞格林[7]反射結構、光學透鏡、直角分光棱鏡、濾光片及圖像傳感器組成。卡塞格林反射結構滿足了光學結構長焦距體積小的需求,直角分光棱鏡將入射光分成兩束,分別至可見光相機、近紅外相機成像,如圖1所示。鑒于光學系統[8]的設計,從機械裝調或者成像器件的物理特性方面很難減小光學畸變,本文所述的光學系統,能夠縮短成像時間,降低背景噪聲,提高光斑圖像信噪比,從而降低光學系統的測量誤差,提高光學系統的測量精度,但同時引入卡塞格林系統的像差。因此,本文通過構建攝遠光學系統校正模型,實現對本攝遠光學系統的校正。本文攝遠光學系統校正模型選用的是擴展的針孔模型,即在小孔成像的過程中考慮畸變因素,模型建立的是完成世界坐標系到圖像二維點的映射關系[9],所以,為了定量描述光學成像過程,分別建立世界坐標系,入射光坐標系(O-XCYCZC),可見光相機坐標系(O-XC1YC1ZC1),近紅外相機坐標系(O-XC2YC2ZC2),可見光圖像物理坐標系1),近紅外圖像物理坐標系(o2-x2y2),可見光圖像像素坐標系(o1-u1v1),近紅外圖像像素坐標系(o2-u2v2),如圖2所示。
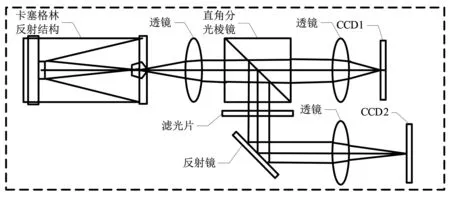
圖1 異光譜卡氏非共軸攝遠光學系統簡圖
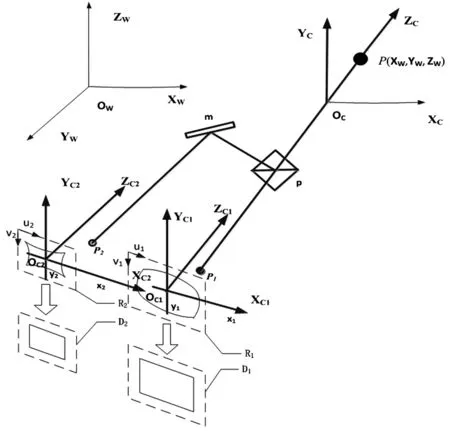
圖2 坐標系關系圖
世界坐標系(O-XWYWZW);以入射光的光軸為Z軸,垂直于光軸的平面為XOY面,建立入射光坐標系(O-XCYCZC),入射光坐標系旨在說明兩相機存在共軸部分;世界坐標系與入射光坐標系之間關系如下:
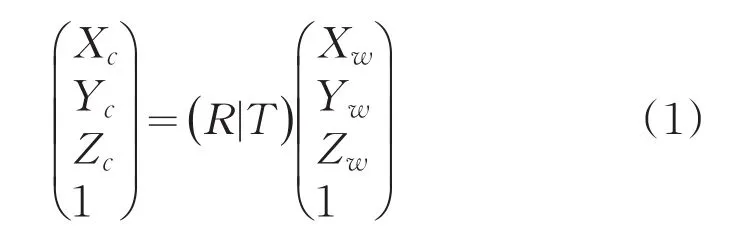
式中,(R|T)為剛體變換矩陣,實現世界坐標系到入射光坐標系轉換。
以可見光相機的光軸為Z軸,垂直于可見光入射光軸為XOY面,建立可見光相機坐標系(O-XC1YC1ZC1);進而得到世界坐標系與可見光相機坐標系之間的關系:
式中,(R1|T1)為剛體變換矩陣,實現世界坐標系到可見光相機坐標系轉換。
以近紅外相機的光軸為Z軸,垂直于近紅外入射光軸為XOY面,建立近紅外相機坐標系(O-XC2YC2ZC2);進而得到世界坐標系與近紅外相機坐標系之間的關系:
式中,(R2|T2)為剛體變換矩陣,實現世界坐標系到近紅外相機坐標系轉換。
以圖像中心點為原點,橫軸為x軸,縱軸為y軸建立圖像物理坐標系;以二維圖像左上角為坐標原點,橫軸為u軸,縱軸為v軸,建立圖像像素坐標系。
得到可見光圖像像素坐標系與世界坐標系之間關系用齊次方程表示為:
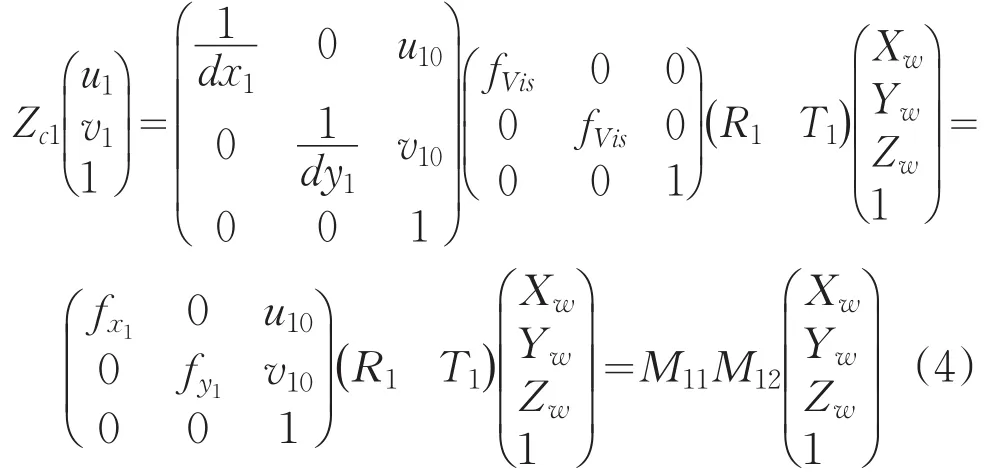
式中,fx1,fy1,u10,v10為相機內參數[10],M11為可見光相機內參矩陣,M12為可見光相機外參數矩陣;經過類似的坐標系變換可得近紅外圖像像素坐標系與世界坐標系之間的關系:
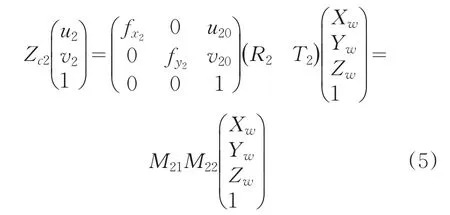
式中,M21為近紅外相機內參矩陣,M22為近紅外相機外參數矩陣。
世界坐標系與可見光相機坐標系和近紅外相機坐標系之間關系用外參數矩陣表示。兩相機坐標系與圖像坐標系用內參數聯系。本文所涉及的光學系統,如圖2所示,共軸部分就是入射光坐標系的ZC軸,計算過程將其合并到兩相機坐標系,為一種等效方法。
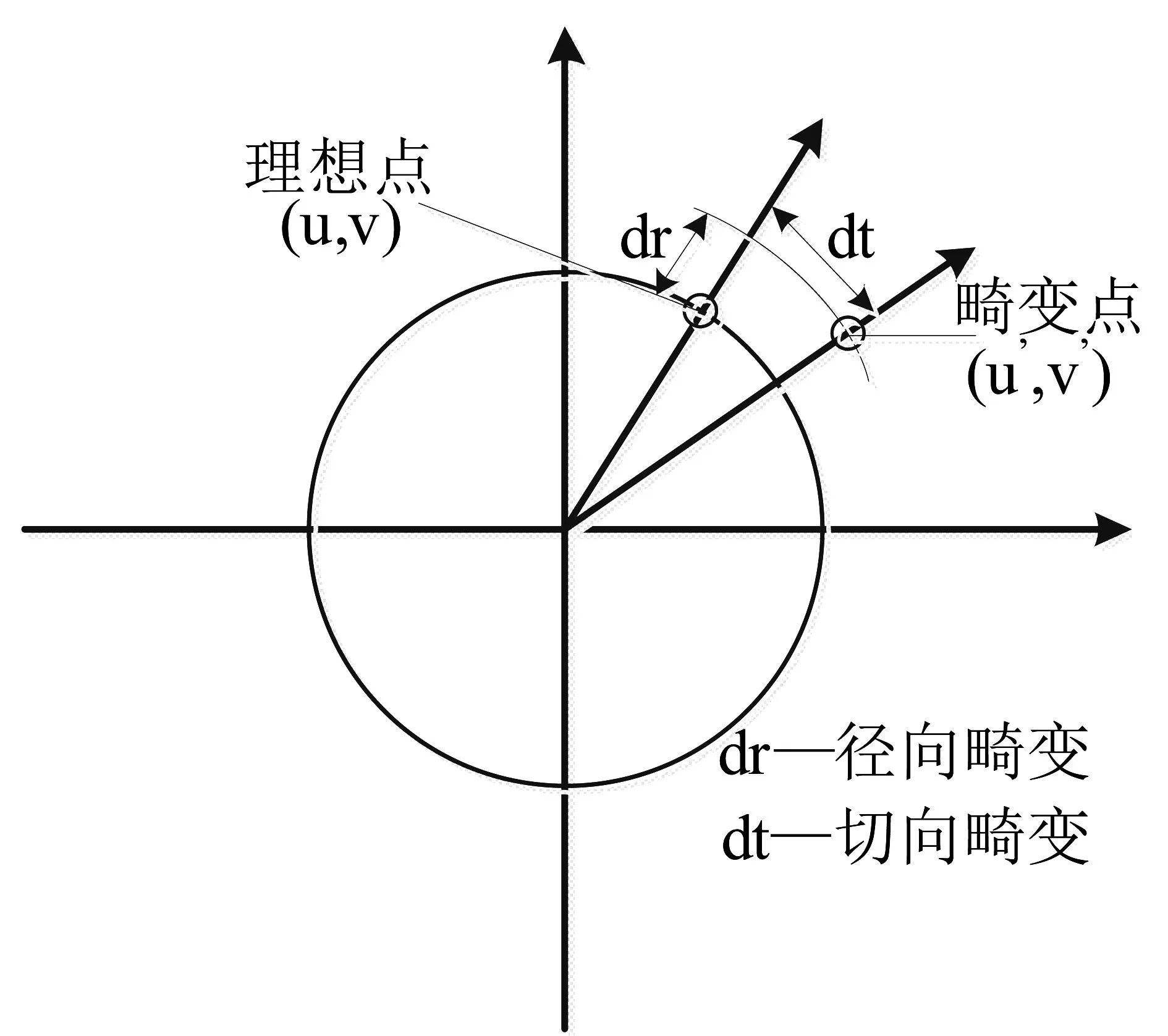
圖3 徑向畸變和切向畸變
攝像機鏡頭存在一些畸變,主要是徑向畸變、切向畸變等,如圖3。由于徑向畸變和切向畸變,理想點和畸變點之間的關系通過畸變系數表示,公式(6)中k1,k2,k3,k4,k5,k6為徑向畸變,p1,p2為切向畸變。式中,定義畸變向量Tdc=[k1,k2,k3,k4,k5,k6,p1,p2],公式(6)通過畸變系數說明畸變點與理想點之間的關系,用畸變向量Tdc表示,所求的畸變向量的維數影響所需圖像的個數。通過解算出相機的內參矩陣、外參矩陣及畸變向量,完成本文攝遠光學系統的校正。
1.2 畸變校正
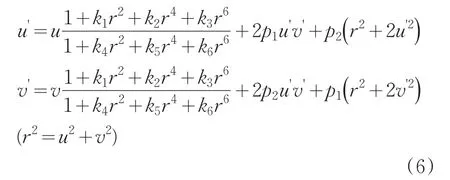
在獲取攝遠光學系統校正模型后,搭建校正系統,圖4為搭建校正系統結構圖,如圖4所示,結構包括:光源;在光源的一側依次設有平行光管以及攝遠光學系統;攝遠光學系統與計算機相連接;平行光管內設有網格板。獲取圖像之前,首先調整各個設備的位置,使得網格板中心點成像于可見光圖像的中心,如圖5所示。
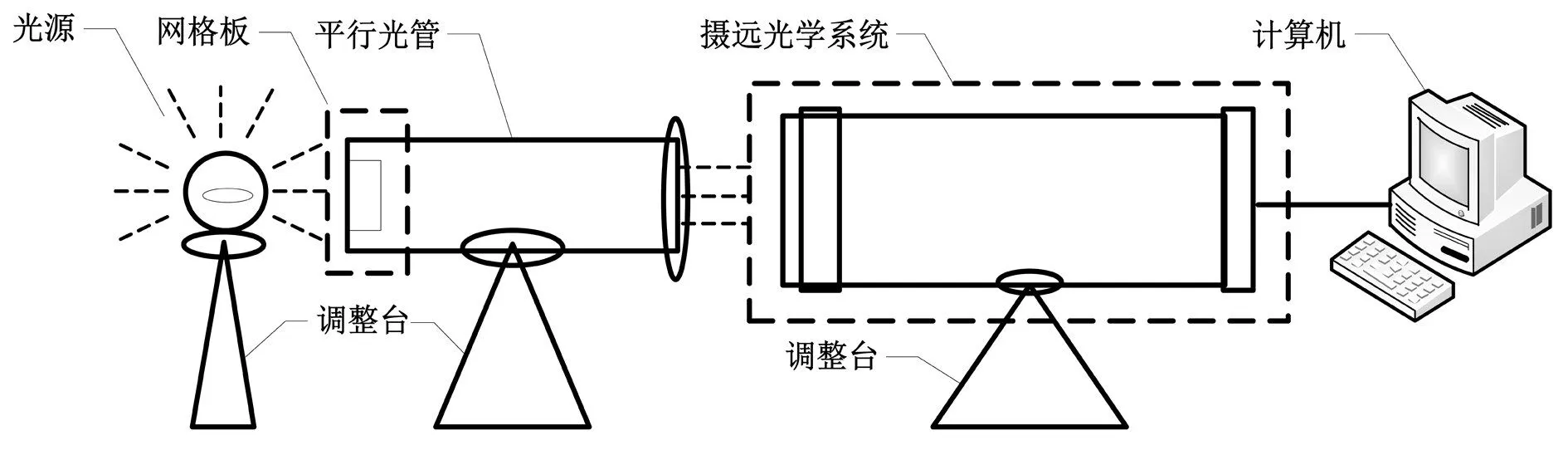
圖4 校正系統結構圖
圖5 網格板
本光學畸變校正方法流程圖如圖6所示。

圖6 光學畸變校正方法流程圖
所用平行光管為可調視度式平行光管[11],產生平行光時焦距為f',平行光管微調標尺刻度為r。獲取平行光管產生可見平行光時的平行光管透鏡焦距,與折射率關系公式為:式中,k為比例常系數,n為空氣中折射率,n'為可見光相機透鏡折射率。

根據平行光管透鏡焦距確定可見光圖像以及近紅外圖像,由以上可得:


由成像公式計算可得可見光時,網格板距離平行光管透鏡的距離;近紅外光時,網格板距離平行光管透鏡的距離。
因此,相對于平行光管焦距調整相對位置為:
可見光時:ΔuVis=uVis-f';
近紅外光時:ΔuIR=uIR-f'。
對應平行光管微調標尺刻度為:
可見光時:rVis=r+ΔuVis;
近紅外光時:rIR=r+ΔuIR。
調整網格板的位置,分別采集可見光與近紅外圖像。循環調節網格板位置,調整攝遠光學系統,使可見光相機和近紅外相機獲得不同拍攝角度的圖像,并重新采集多對不同角度的可見光圖像以及近紅外圖像,且循環次數N大于等于14次。
建立坐標系如圖2所示,世界坐標系(O-XWYWZW)與可見光相機坐標系(O-XC1YC1ZC1)和近紅外相機坐標系(O-XC2YC2ZC2)需要求解12個參數,其中,三維坐標系變換為旋轉和平移關系,旋轉和平移分別3個參數,共6個參數,這里將共軸部分合并到兩相機坐標系。可見光相機坐標系(O-XC1YC1ZC1)與可見光圖像像素坐標系(o1-u1v1)之間關系即為相機內參數為4個參數,同理近紅外相機也存在4個內參數。共需要求解20個參數。
對于平面圖像能夠提供8個方差,即映射一個正方形到四邊形可以用4個(x,y)來描述,對于四個視場就有8*4=32=4*6+4+4,即求解所有的參數,至少需要四個視場,即可見光相機與近紅外相機共需要四個視場,因此共需要4幅圖像(可見光兩幅,近紅外兩幅)。為了提高精度,減小隨機誤差,多次試驗,圖像個數N大于等于14,重投影誤差小于0.5像素,表1為重投影誤差統計表,如表1所示,

表1 重投影誤差與圖像個數統計表
由表1可知,獲取圖像個數越大,重投影誤差越小,標定效果越好。
網格板包括多個單位正方形,獲取網格板內的單位正方形的邊長,根據小孔成像模型確定單位正方形對應的像素點。根據像素點以及圖像坐標系確定坐標變換矩陣,坐標變換矩陣用于將畸變圖像變換到無畸變圖像。畸變圖像為可見光圖像以及近紅外圖像,無畸變圖像包括可見光無畸變圖像以及近紅外無畸變圖像。計算重投影誤差,重投影誤差小于0.5像素,滿足要求。如果不滿足要求,則重新進行圖像坐標提取,并且考察坐標變換矩陣參數的正確性。
2 校正實驗及結果
經過以上攝遠光學系統校正方法,采集圖像如圖7(a),圖8(a)所示,選擇以圖像中心9*9矩陣大小的網格角點,即如圖5中虛線框內9*9的網格點所成的像,提取網格角點坐標。提取坐標如圖7(b),圖8(b)中標記的網格點坐標,其中,圖7(b)是可見光圖像標記的網格點,圖8(b)是近紅外圖像標記的網格點;其中,所標記的網格點坐標是亮色的圓點。
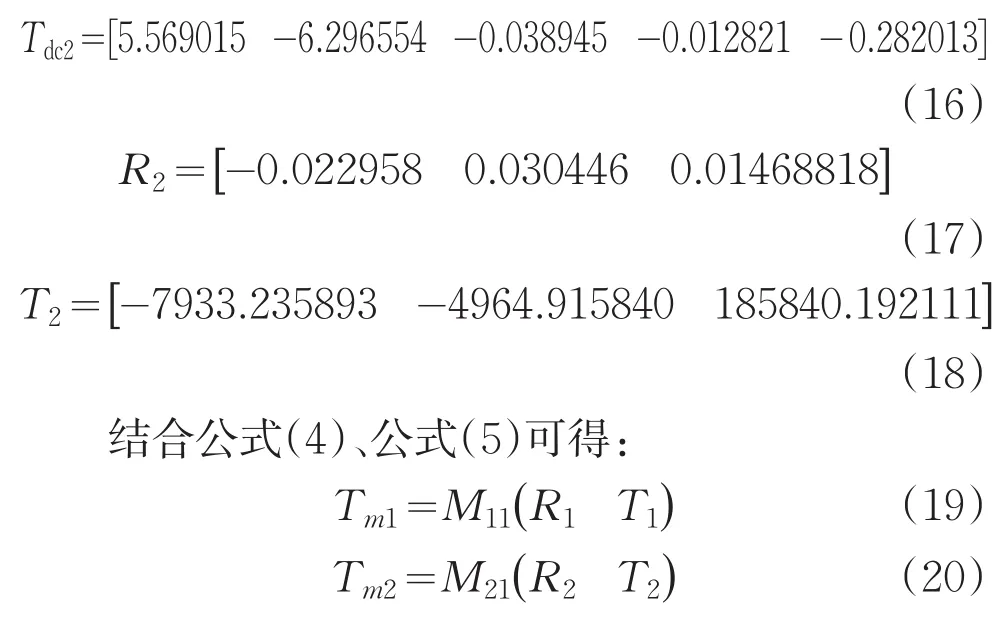
攝遠光學系統校正模型前面已經得出。由世界坐標系到圖像像素坐標系用矩陣Tm表示,可見光與近紅外分別用Tm1,Tm2表示。如圖5中網格板,每一個小格都是邊長為d的正方形,通過成像模型可以計算出邊長d在理想圖像上對應的像素大小,得出畸變向量Tdc,結合矩陣Tm得到理想無畸變圖像坐標Cd,因此,之前所提取的畸變坐標記為C,Cd與C之間關系為:

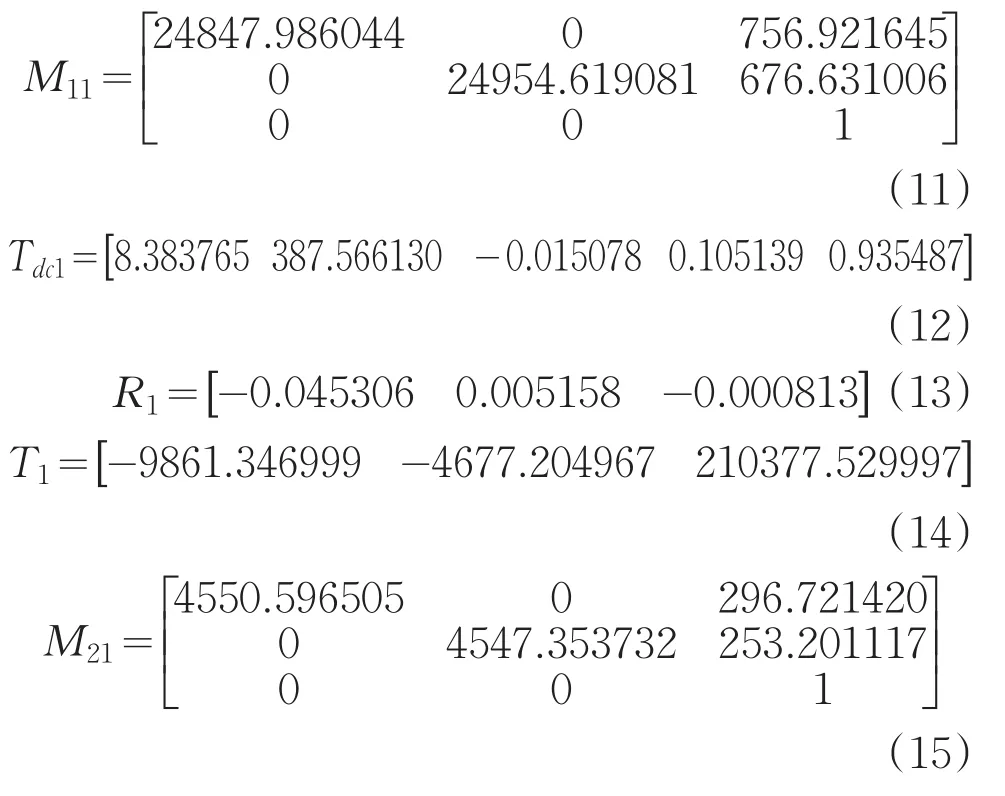
式中,Tdc?Tm表示畸變圖像到無畸變圖像的坐標變換矩陣。由重投影誤差統計數據可知,圖像個數大于14時,滿足一般要求,一次試驗采集20幀圖像,得出可見光相機內參數矩陣M11、旋轉矩陣R1、平移矩陣T1、畸變向量Tdc1和近紅外相機內參數矩陣M21、旋轉矩陣R2、平移矩陣T2、畸變向量Tdc2,這里畸變向量保留5維:
設光學校正后圖像為I',帶有光學畸變的圖像為I,根據矩陣Tm得到三者關系:

同步采集圖像,經過矩陣變換,得到可見光與近紅外無畸變圖像,可見光圖像如圖7(a)、近紅外圖像如圖8(a)所示圖像,進行矩陣變換得到可見光無畸變圖像如圖7(c)、近紅外無畸變圖像如圖8(c)所示的圖像。
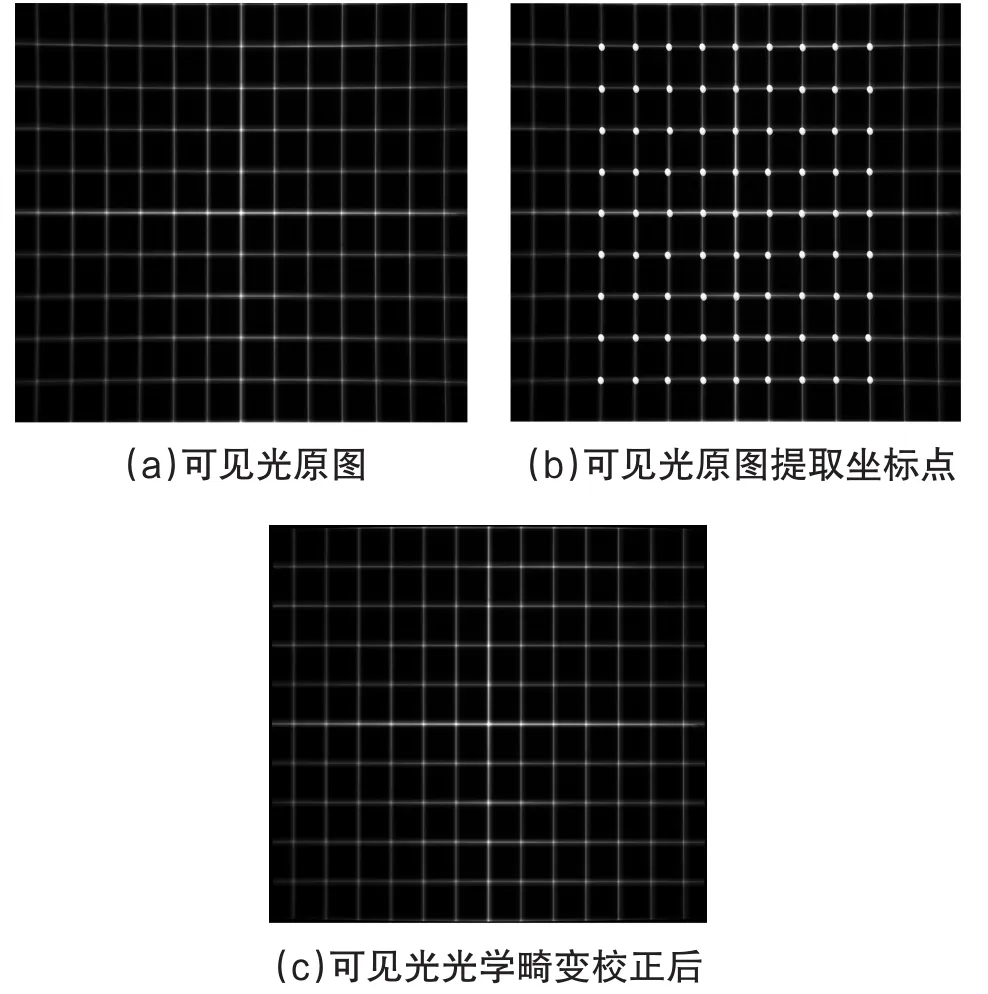
圖7 可見光圖像
提取可見光圖像如圖7(b)中心9*9網格區域坐標和近紅外圖像如圖8(b)中心9*9網格區域坐標,利用坐標變換矩陣計算重投影誤差,統計五組試驗數據如表2。
經過試驗得出的攝遠光學系統中可見光與近紅外相機的光學畸變校正矩陣應用于光學系統校正,得出表2的重投影誤差精度達到0.4像素,可見光重投影誤差的RMS值為0.070433,近紅外重投影誤差的RMS值為0.048049,該試驗結果可以很好地應用于異光譜卡氏非共軸攝遠光學系統畸變的校正。
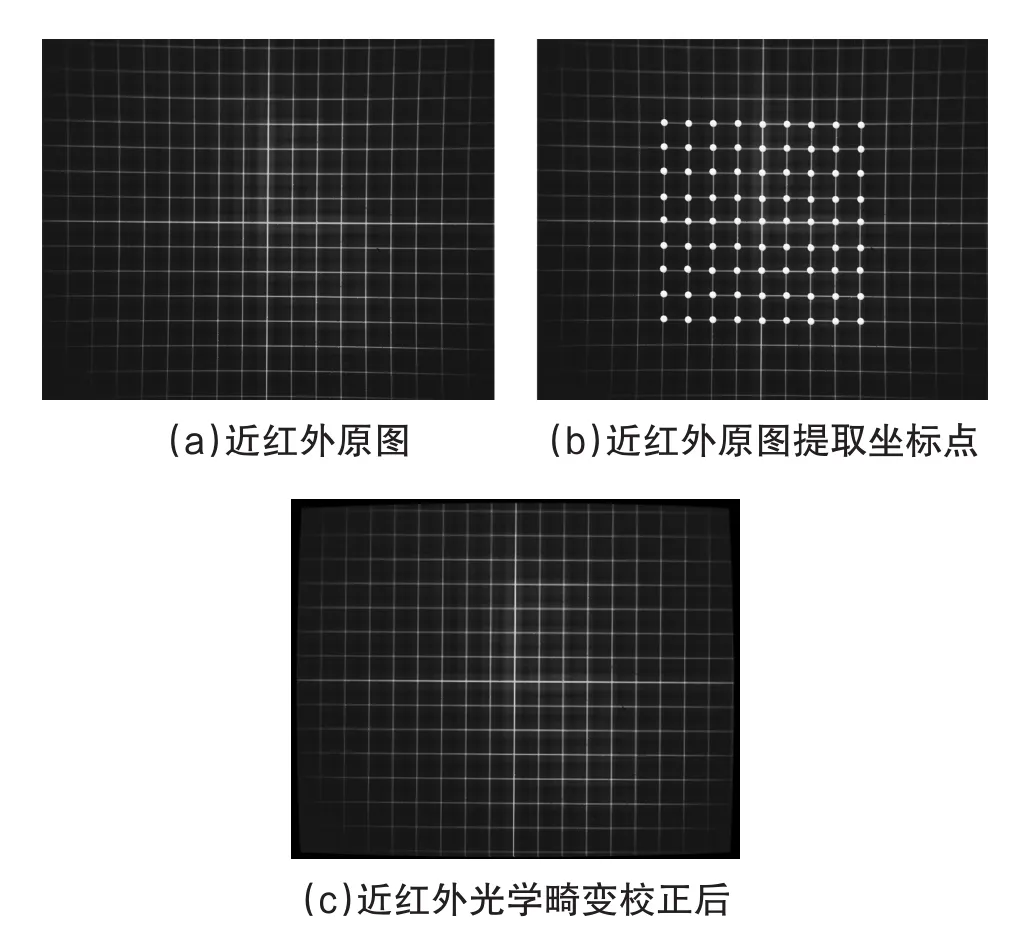
圖8 近紅外圖像
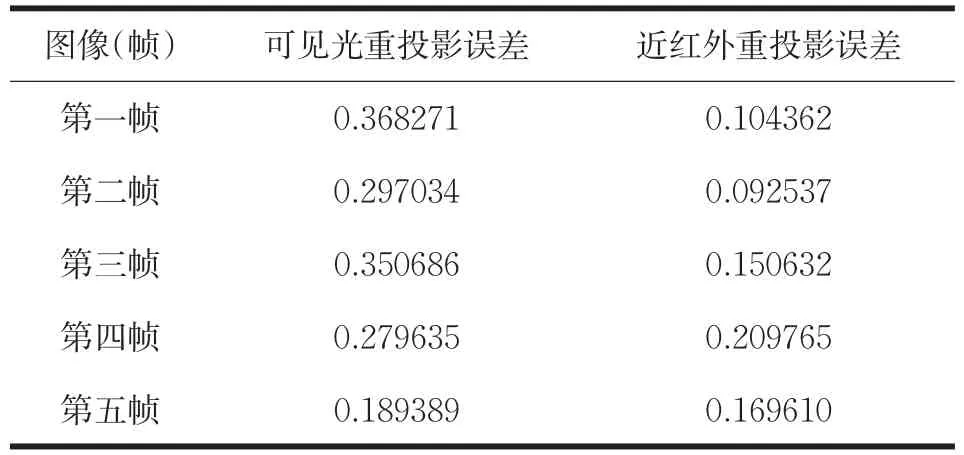
表2 五次實驗重投影誤差統計
3 結論
本文提出了一種對異光譜卡氏非共軸攝遠光學系統的光學畸變校正方法,解決了基于卡塞格林系統的攝遠光學系統存在像差的問題。在求解的過程中,用平行光管提供等效目標光源,實現攝遠光學系統高精度標定,簡化可見光相機與近紅外相機需要求解的多個參數,滿足了快速計算的工程原則,該方法的光學畸變校正結果重投影誤差小于0.4像素,實驗結果表明:該方法在基于卡塞格林系統設計的不同光譜、不同分辨率及非共軸的攝遠光學系統中,一次標定達到在測試過程中自動調優的效果,在外場試驗各項精度測試過程中發揮了重要的作用。