艦船主動(dòng)力裝置故障隔離與參數(shù)估計(jì)方法*
2019-04-26 05:20:24朱國情陳于濤
國防科技大學(xué)學(xué)報(bào) 2019年2期
黃 林,程 剛,朱國情,陳于濤
(海軍工程大學(xué) 艦艇裝備仿真技術(shù)研究所, 湖北 武漢 430033)
艦船主動(dòng)力裝置是艦船至關(guān)重要的組成部分,包含了主機(jī)、傳動(dòng)裝置、推進(jìn)軸系和推進(jìn)器等。由于結(jié)構(gòu)復(fù)雜且工作環(huán)境惡劣,因此故障率較高,但艦船機(jī)艙空間狹窄,管路系統(tǒng)復(fù)雜,發(fā)生故障后很難通過肉眼觀察進(jìn)行排查[1]。基于上述特點(diǎn),針對艦船主動(dòng)力裝置的故障診斷與隔離問題一直是重要的研究課題。
基于數(shù)學(xué)模型的故障診斷技術(shù)是近年來發(fā)展較快的一種方法。通過建立一個(gè)能夠準(zhǔn)確描述系統(tǒng)動(dòng)態(tài)變化過程的數(shù)學(xué)模型,在其基礎(chǔ)上,推導(dǎo)系統(tǒng)的解析冗余關(guān)系(Analytical Redundancy Relations, ARRs),建立系統(tǒng)的故障特征矩陣(Fault Signature Matrix, FSM),再通過在線對系統(tǒng)故障特征向量進(jìn)行觀測,可以實(shí)時(shí)地對系統(tǒng)進(jìn)行故障診斷與隔離。基于解析模型故障診斷的準(zhǔn)確性與實(shí)時(shí)性很大程度上取決于系統(tǒng)模型的質(zhì)量。針對復(fù)雜系統(tǒng)建模與故障診斷問題,鍵合圖理論以其規(guī)范化、系統(tǒng)化和支持多能域耦合建模的特點(diǎn),為復(fù)雜系統(tǒng)的故障診斷提供了一個(gè)便捷、有效的方法。參數(shù)估計(jì)是在系統(tǒng)故障隔離基礎(chǔ)之上,采用一定的數(shù)學(xué)算法對系統(tǒng)中的不確定性參數(shù)進(jìn)行估計(jì),掌握和分析系統(tǒng)的故障程度,這對于緩慢性故障的診斷具有非常重要的意義,可以應(yīng)用于系統(tǒng)的健康狀態(tài)評估,將事后維修隨后逐漸發(fā)展到基于運(yùn)行狀態(tài)的狀態(tài)維修,從而對主動(dòng)力裝置進(jìn)行快速和準(zhǔn)確的評估[2]。
在國外,Samantaray等[3]、Bouamama等[4]、Merzouki等[5]和Loureiro等[6]針對基于鍵合圖理論的建模與故障診斷問題進(jìn)行了大量深入的研究,其中最具代表性的為Samantaray等[7-8]針對鍋爐蒸汽系統(tǒng)進(jìn)行的鍵合圖建模,以及基于該模型的故障診斷方法研究,充分證明了即使是對于蒸汽系統(tǒng)這樣復(fù)雜、強(qiáng)非線性的系統(tǒng),基于鍵合圖理論的建模與故障診斷方法同樣是適用的。在國內(nèi),樊久銘等[9]建立了液體火箭發(fā)動(dòng)機(jī)的故障診斷鍵合圖模型并進(jìn)行了故障診斷的仿真驗(yàn)證。牛剛等[10]針對機(jī)車制動(dòng)系統(tǒng)故障檢測與隔離的問題,建立了系統(tǒng)鍵合圖模型,提出了采用序貫概率比方法對系統(tǒng)殘差進(jìn)行跟蹤判斷,實(shí)現(xiàn)了部件的故障診斷與隔離。黃志武等[11]采用同樣的方法,針對法維萊制動(dòng)機(jī)系統(tǒng),推導(dǎo)計(jì)算了系統(tǒng)解析冗余關(guān)系,得到了系統(tǒng)故障特征矩陣,并將該方法進(jìn)行了實(shí)際應(yīng)用。彭小輝等[12]針對航天器推進(jìn)系統(tǒng)的時(shí)變特性,在系統(tǒng)鍵合圖模型的基礎(chǔ)上,采用了Z檢驗(yàn)分析與解析冗余關(guān)系相結(jié)合的半定性故障隔離方法,實(shí)現(xiàn)了對部件的故障檢測與隔離。
基于雙因果鍵合圖模型的故障診斷是在上述研究方法上的進(jìn)一步創(chuàng)新,相比于文獻(xiàn)[9-12]所采用的因果關(guān)系倒置診斷鍵合圖模型(Diagnostic Bond Graph, DBG),雙因果鍵合圖可以幫助建模者以更靈活的方式進(jìn)行系統(tǒng)因果關(guān)系的指定。一方面,通過對因果路徑的分析,在推導(dǎo)系統(tǒng)ARRs時(shí)不需要形成具體的數(shù)學(xué)表達(dá)式,減少了大量的工作。另一方面,相比于傳統(tǒng)的鍵合圖模型,雙因果鍵合圖模型中的故障部件同時(shí)接收了系統(tǒng)流變量和勢變量的信息,因此,根據(jù)部件的構(gòu)造方程,可以實(shí)現(xiàn)部件的參數(shù)估計(jì),實(shí)時(shí)地跟蹤故障狀態(tài)參數(shù),具有非常重要的現(xiàn)實(shí)意義。
文獻(xiàn)[13]以兩水箱系統(tǒng)為例,研究了基于雙因果鍵合圖模型的故障診斷與隔離問題,文獻(xiàn)[14]提出了基于雙因果鍵合圖模型的參數(shù)估計(jì)方法,并以一小型的移動(dòng)機(jī)器人為對象進(jìn)行了方法的驗(yàn)證。
針對艦船主動(dòng)力裝置的故障隔離與參數(shù)估計(jì)的問題,提出采用基于雙因果鍵合圖模型的定量故障隔離與參數(shù)估計(jì)方法。
1 系統(tǒng)分析與建模
鍵合圖理論最早由Paynter教授在20世紀(jì)60年代初提出,后經(jīng)推廣,逐漸成為一種系統(tǒng)動(dòng)力學(xué)圖示建模方法[15]。
1.1 艦船主動(dòng)力裝置鍵合圖建模
圖1所示為某型艦主動(dòng)力裝置的鍵合圖模型,該型艦采用的主機(jī)為16PA6-280STC渦輪增壓柴油機(jī),文獻(xiàn)[16]建立了該型柴油機(jī)的鍵合圖模型并進(jìn)行了詳細(xì)的試驗(yàn)驗(yàn)證,柴油機(jī)模型即采用該模型。飛輪是保證柴油機(jī)連續(xù)運(yùn)轉(zhuǎn)的非常重要的部件,采用慣性元件Ifly對其進(jìn)行建模。主機(jī)通過離合器與齒輪箱接合,在不考慮接合和脫開操作的情況下,離合器可以采用Ccul和Rcul進(jìn)行表示(文獻(xiàn)[17]建立了更為詳細(xì)的離合器鍵合圖模型),分別為其扭轉(zhuǎn)剛度和阻尼。變換器TF表示齒輪箱傳動(dòng);Ipinion,Igear,Rpinion,Rgear和Cgear分別表示齒輪箱小齒輪轉(zhuǎn)動(dòng)慣量、大齒輪轉(zhuǎn)動(dòng)慣量、小齒輪摩擦阻力、大齒輪摩擦阻力和扭轉(zhuǎn)剛度[18];Ccoup和Rcoup分別表示萬向聯(lián)軸器的扭轉(zhuǎn)剛度和阻尼;Ishaft和Rshaft分別表示軸系的轉(zhuǎn)動(dòng)慣量和摩擦阻力;Rcpp為螺旋槳,Ivessel表示船體的質(zhì)量。推力軸承連接萬向聯(lián)軸器,固定在船體上,用于傳遞柴油機(jī)功率和承受螺旋槳推力,其簡化成了以航速為輸入變量的阻力模塊Rthrust。模型中略去了部分對模型整體動(dòng)態(tài)特性沒有影響并且故障率非常低的部件,例如用于連接主機(jī)與齒輪箱的高彈聯(lián)軸器、水潤滑軸承等。
根據(jù)造船廠提供的“主推進(jìn)裝置控制監(jiān)測系統(tǒng)測點(diǎn)表”,除去部分輔助系統(tǒng)以及溫度或開關(guān)量測點(diǎn),與本研究對象相關(guān)的傳感器測點(diǎn)有(在圖1所示的模型中進(jìn)行了標(biāo)明):柴油機(jī)轉(zhuǎn)速傳感器Df ∶N,軸扭矩傳感器De ∶τshaft,大齒輪和小齒輪轉(zhuǎn)速傳感器Df ∶Npinion和D ∶Ngear,軸轉(zhuǎn)速傳感器Df ∶Nshaft,槳扭矩傳感器De ∶τcpp,航速Df ∶vs,油門齒桿位置傳感器和柴油機(jī)功率傳感器。
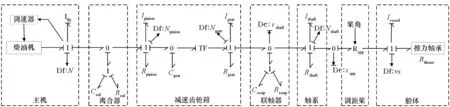
圖1 艦船主動(dòng)力裝置鍵合圖模型Fig.1 Bond graph model of the marine main power plant
1.2 BG-LFT故障建模
BG-LFT故障建模[19]是在系統(tǒng)鍵合圖模型的基礎(chǔ)上,提供一種簡潔明了的基于故障機(jī)理的圖示化故障建模方法,采用該方法可以非常方便地進(jìn)行系統(tǒng)設(shè)備、執(zhí)行器和傳感器等的故障模擬。
假設(shè)阻性元件Rn上作用有一個(gè)乘性故障,如圖2所示,則其發(fā)生故障后輸出的故障勢變量大小為:
eF=Rn(1+FR)fR
(1)
式中,Rn為阻性元件在正常狀態(tài)下的阻性值,F(xiàn)R為該乘性故障的故障因子。
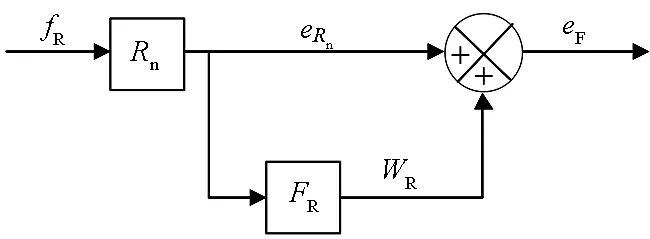
圖2 阻性元件乘性故障方塊Fig.2 Block diagram of an R-element with a multiplicative fault
圖3所示為圖2對應(yīng)的BG-LFT模型。其中,故障因子Fn前的負(fù)號“-”,是由0節(jié)點(diǎn)和1節(jié)點(diǎn)的計(jì)算規(guī)則所確定;De*∶zFR表示該傳感器為虛擬傳感器,并不真實(shí)存在,其作用是解釋模型的運(yùn)算邏輯,使模型更容易被理解;可調(diào)勢源MSe ∶WR表示由于故障WR的引入,而使得模型所產(chǎn)生的額外勢變量的影響。
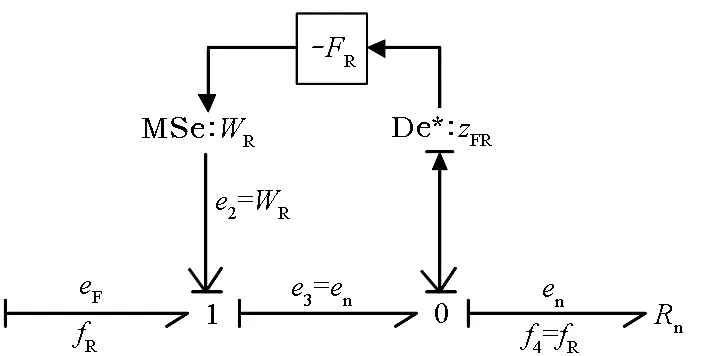
圖3 阻抗型R元件乘性故障的鍵合圖LFT模型Fig.3 BG model LFT of an R-element in resistive causality with a multiplicative fault
1.3 系統(tǒng)雙因果鍵合圖模型
雙因果鍵合圖的概念最早由Gawthrop教授提出[20],用于研究基于鍵合圖模型的系統(tǒng)逆向動(dòng)力學(xué)以及系統(tǒng)參數(shù)及狀態(tài)估計(jì)等問題。雙因果鍵合圖的功率鍵和其對應(yīng)的因果關(guān)系如圖4所示,并引入了幾個(gè)新的元件,分別為源-傳感器(Source-Sensor, SS)、勢放大器(Amplifier of Effort, AE)、流放大器(Amplifier of Flow, AF)。雙因果關(guān)系鍵的因果關(guān)系指定規(guī)則與傳統(tǒng)鍵合圖模型的因果關(guān)系指定規(guī)則的對比如圖4(a)和圖4(b)所示。

(a) 傳統(tǒng)鍵合圖因果關(guān)系 (a) Causality of traditional bond graph
(b) 雙鍵合圖因果關(guān)系 (b) Causality of bicausal bond graph
圖4 雙因果鍵因果關(guān)系規(guī)則
Fig.4 Information exchange in bicausal bonds
圖4(b)為雙因果鍵因果關(guān)系的兩種表示方法,功率鍵的兩端各有半截因果劃,半箭頭表明了系統(tǒng)內(nèi)能量流動(dòng)的方向。在雙因果鍵中,由于勢變量和流變量的指定方向一致,因此,根據(jù)鍵合圖理論中0節(jié)點(diǎn)和1節(jié)點(diǎn)的特性方程和計(jì)算法則,對于連接有雙因果鍵的節(jié)點(diǎn)來說,雙因果鍵必須是成對出現(xiàn),而且只能有兩條,普通功率鍵的數(shù)量則沒有限制。
圖5所示為艦船動(dòng)力裝置的雙因果鍵合圖模型,該模型等同于文獻(xiàn)[9-12]的診斷鍵合圖模型,SSf和SSe作為信號源接收傳感器的信號輸入系統(tǒng)并進(jìn)行系統(tǒng)殘差的分析和診斷。ARR3至ARR9在其對應(yīng)的結(jié)點(diǎn)元件處已標(biāo)明。文獻(xiàn)[13]證明了不管選擇哪一個(gè)元件作為因果關(guān)系的結(jié)點(diǎn),盡管其生成的FSM不同,但其部件的故障診斷特性都是相同的。

圖5 艦船動(dòng)力裝置雙因果鍵合圖模型Fig.5 Bicausal bond graph model of the marine main power plant
2 艦船主動(dòng)力裝置解析冗余關(guān)系分析
2.1 艦船主動(dòng)力裝置ARRs
對于艦船主動(dòng)力裝置,ARR1和ARR2可以直接從調(diào)速器的控制輸出油門齒桿位置和柴油機(jī)功率輸出獲得,例如,假設(shè)實(shí)際裝備中的調(diào)速器發(fā)生故障,其輸出的油門齒桿位置與模型控制器的輸出將不一致,則通過ARR1可以立即進(jìn)行調(diào)速器故障的判斷。
由于雙因果鍵合圖對于每一個(gè)ARR都定義了明確的結(jié)點(diǎn)元件,因此可以直接通過因果關(guān)系的推導(dǎo)得到ARR路徑上所有的部件,而不需要推導(dǎo)具體的ARR數(shù)學(xué)表達(dá)式,節(jié)省了非常大的工作量。例如,根據(jù)圖5所示的艦船主動(dòng)力裝置的雙因果鍵合圖模型,傳感器SSf ∶N對應(yīng)的結(jié)點(diǎn)元件為Rcul,其對應(yīng)的因果路徑關(guān)系為:
由上述因果路徑可得,ARR3(Rcul為對應(yīng)的結(jié)點(diǎn)元件)包含的系統(tǒng)部件為:
ARR3=ARR3(Ccul,Rcul, Engine, Ifly)
(2)
ARR包含的部件越少,其所能進(jìn)行故障診斷的針對性就越強(qiáng)。同理,根據(jù)模型因果關(guān)系,ARR4至ARR9的表達(dá)式分別為:
ARR4=ARR4(Engine, Ifly,Rpinion,Ipinion, TF,Cgear)
(3)
ARR5=ARR5(TF,Rgear,Igear,Cgear)
(4)
ARR6=ARR6(Ccoup,Rcoup)
(5)
ARR7=ARR7(Rshaft,Ishaft)
(6)
ARR8=ARR8(Rcpp)
(7)
ARR9=ARR9(Rcpp,Ivessel,Rthrust)
(8)
2.2 系統(tǒng)FSM
根據(jù)上述系統(tǒng)ARRs的表達(dá)式,實(shí)際裝備中的9個(gè)傳感器分別對應(yīng)9個(gè)ARRs。因?yàn)椋鏘shaft和Rshaft都為軸系相關(guān)部件,并且系統(tǒng)部件的轉(zhuǎn)動(dòng)慣量一般不會(huì)發(fā)生變化,則其在FSM中可統(tǒng)一表示為軸系。Ifly也不需要在FSM中考慮,TF表示齒輪箱傳動(dòng),因此,可以得到系統(tǒng)的FSM如表1所示。FSM最右側(cè)兩列Mb和Ib分別表示故障可診斷性和可隔離性。從表1中可以看出,在現(xiàn)有的傳感器布置方案下,系統(tǒng)中所有部件的故障都是可診斷并且可隔離的。
2.3 基于雙因果鍵合圖的參數(shù)估計(jì)方法
參數(shù)估計(jì)指的是對發(fā)生故障部件的故障參數(shù)進(jìn)行估計(jì)和預(yù)測。通過一定的算法,結(jié)合LFT模型以及雙因果鍵合圖,可以實(shí)現(xiàn)系統(tǒng)故障的參數(shù)估計(jì)。根據(jù)故障類型的不同,參數(shù)估計(jì)方法可分為設(shè)備故障、執(zhí)行器故障和傳感器故障,分別對應(yīng)鍵合圖模型中的儲(chǔ)能和耗能元件(C,R,I)、源元件(Se,Sf,MSe,MSf)和傳感器(De,Df),雖然故障種類不同,但實(shí)現(xiàn)方法和原理是一致的,本文以設(shè)備參數(shù)故障為例,進(jìn)行基于雙因果鍵合圖的參數(shù)估計(jì)方法研究。
假設(shè)艦船主動(dòng)力裝置經(jīng)長時(shí)間服役后,軸系磨損加重,則裝置中Rshaft對應(yīng)的摩擦阻力將增大,其BG-LFT模型如圖6(a)所示,其中FR為故障因子。圖6(b)所示為對應(yīng)的以Rshaft為結(jié)點(diǎn)元件的雙因果鍵合圖模型。

表1 艦船主動(dòng)力裝置故障特征矩陣
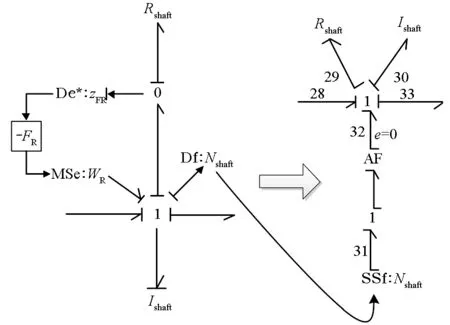
圖6 阻性元件R的參數(shù)估計(jì)模型Fig.6 Fault estimation model of the R-element
在圖6(b)中,假設(shè)系統(tǒng)正常運(yùn)行,則根據(jù)1節(jié)點(diǎn)的系統(tǒng)解析冗余關(guān)系有:
(9)
BG-LFT模型故障注入后,Rshaft元件發(fā)生故障,軸系磨損量增大,系統(tǒng)解析冗余關(guān)系為:

(10)
假設(shè)阻性元件Rshaft的故障是可隔離的,則可以通過雙因果鍵合圖的計(jì)算法則以及系統(tǒng)殘差與故障系統(tǒng)之間的關(guān)系對系統(tǒng)發(fā)生的故障大小進(jìn)行估計(jì)。根據(jù)雙因果鍵合圖因果關(guān)系計(jì)算法則,由BG-LFT模型中的勢源和傳感器的因果關(guān)系推導(dǎo),可以得到發(fā)生在阻性元件Rshaft的故障值為:
(11)
zFR=R·SSf
(12)
(13)
3 仿真驗(yàn)證
3.1 系統(tǒng)模型與雙因果診斷鍵合圖模型的耦合
圖7所示為艦船動(dòng)力裝置系統(tǒng)模型與雙因果診斷鍵合圖模型的耦合模型。為了驗(yàn)證本文理論方法的正確性,將系統(tǒng)的鍵合圖模型與診斷鍵合圖模型連接,用系統(tǒng)的鍵合圖模型模擬實(shí)際系統(tǒng),在系統(tǒng)中注入相應(yīng)故障,通過診斷鍵合圖模型進(jìn)行檢測。為了模擬真實(shí)環(huán)境噪聲工況下傳感器測量的不確定性,所有由傳感器采集的系統(tǒng)模型信號都加入了相應(yīng)的噪聲污染,噪聲信號采用MATLAB/Simulink中白噪音,噪聲的振幅為傳感器輸出的0.1%,平均值為0。圖7中W1至W9為噪聲信號與傳感器信號的疊加輸出。仿真試驗(yàn)中,由于DBG模型多采用微分計(jì)算,為消除傳感器輸出信號在噪聲干擾下由于微分計(jì)算而產(chǎn)生的異常階躍,采用算術(shù)平均濾波法,對傳感器輸出信號和殘差信號進(jìn)行了五點(diǎn)平滑降噪處理。在實(shí)際故障診斷的應(yīng)用中,只需要將實(shí)際系統(tǒng)代替圖7中的系統(tǒng)行為模型即可。模型中,r1至r9分別對應(yīng)系統(tǒng)的9個(gè)殘差。建立好模型后,建模者可以任意地對動(dòng)力裝置中的任何部件進(jìn)行故障仿真試驗(yàn),從而可以得到大量的離線故障仿真數(shù)據(jù),這對于動(dòng)力裝置的后續(xù)健康狀態(tài)檢測具有非常大的幫助。
3.2 MATLAB仿真試驗(yàn)與結(jié)果分析
以比較典型的艦船長時(shí)間服役后,艦船主動(dòng)力裝置柴油機(jī)效率下降和軸系磨損加重為例,開展故障仿真,并進(jìn)行故障診斷與隔離。
3.2.1 柴油機(jī)效率下降故障
仿真時(shí)間設(shè)置為1000 s,在第500 s的時(shí)候注入柴油機(jī)效率下降故障,使柴油機(jī)輸出功率從100%降低至95%,圖8所示為雙因果鍵合圖DBG模型ARR1至ARR9的動(dòng)態(tài)響應(yīng)。從ARR的響應(yīng)中可以很明顯地看出,ARR2,ARR3和ARR4對該故障是敏感的,其值非常明顯地偏離了0的位置,其余殘差均在0左右波動(dòng)。ARR9在第500 s的時(shí)候有一點(diǎn)小波動(dòng),產(chǎn)生該現(xiàn)象的原因是柴油機(jī)輸出功率的下降導(dǎo)致螺旋槳推力下降,而因?yàn)榇w滿載質(zhì)量比較大,慣性也大,因此航速下降得比較慢,待系統(tǒng)重新穩(wěn)定后,ARR9恢復(fù)至0。通過以上分析可以得到故障特征向量[0 1 1 1 0 0 0 0 0],通過與表1的FSM進(jìn)行對比,其柴油機(jī)所對應(yīng)的故障特征向量是相匹配的并且是唯一的,因此可以知道是主動(dòng)力裝置中的柴油機(jī)發(fā)生了故障,該故障是可隔離的。
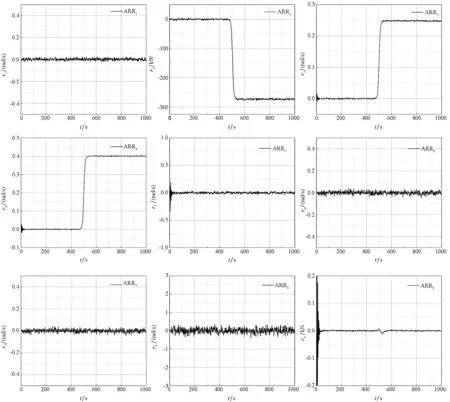
圖8 柴油機(jī)效率下降故障殘差響應(yīng)Fig.8 Residuals response when engine efficiency decline
3.2.2 軸系磨損增加
設(shè)置軸系磨損故障因子為0.172,使磨損值正常的1450 Nms/rad增加至1700 Nms/rad,圖9所示為在故障下系統(tǒng)雙因果鍵合圖DBG模型ARRs的動(dòng)態(tài)響應(yīng)。從ARRs的響應(yīng)中可以很明顯地看出,只有ARR7對該故障是敏感的,其值非常明顯地偏離了0的位置,其余殘差均在0左右波動(dòng)。通過以上分析可以得到故障特征向量[0 0 0 0 0 0 1 0 0],從而檢測出系統(tǒng)中的軸系發(fā)生了故障,實(shí)現(xiàn)了該故障的診斷與隔離,驗(yàn)證了本方法的正確性。
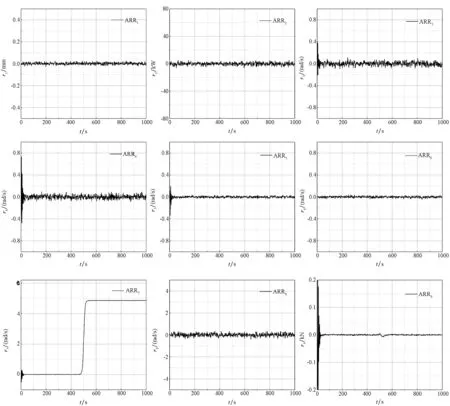
圖9 軸系磨損增加故障殘差響應(yīng)Fig.9 Residuals response of the wear of shaft
3.2.3 參數(shù)估計(jì)仿真分析結(jié)果
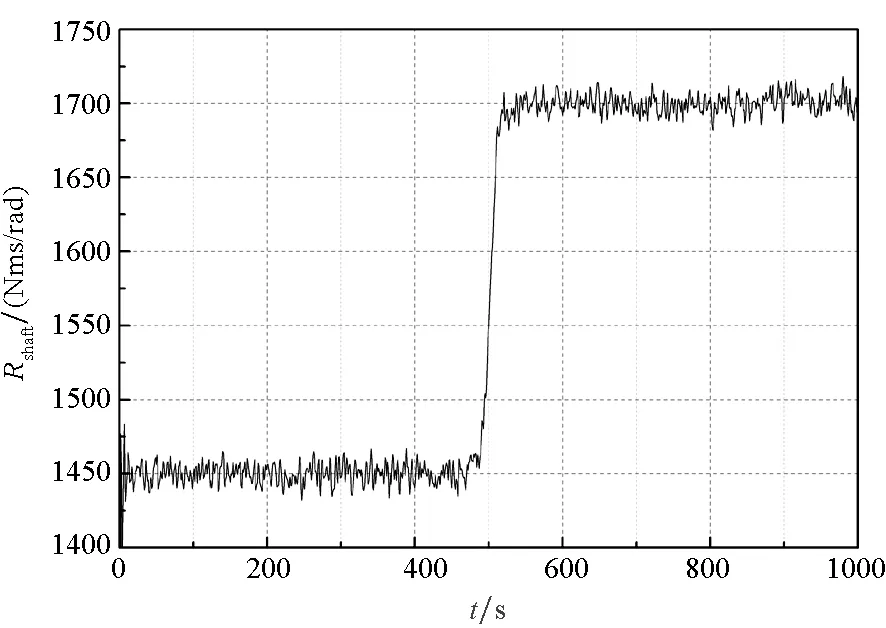
圖10 軸系磨損故障參數(shù)估計(jì)Fig.10 Estimation of the friction of shaft
圖10和圖11所示為柴油機(jī)效率以及軸系磨損故障參數(shù)的估計(jì)值隨時(shí)間變化的動(dòng)態(tài)曲線,從圖中可以看出,通過采用本文的方法,不管是故障前還是故障后,系統(tǒng)都能夠很快地對故障參數(shù)進(jìn)行實(shí)時(shí)估計(jì)。在故障注入后,系統(tǒng)能夠非常迅速地對故障參數(shù)進(jìn)行估計(jì),并且是非常準(zhǔn)確的。
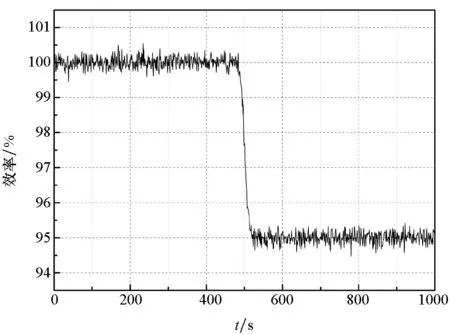
圖11 柴油機(jī)效率下降參數(shù)估計(jì)Fig.11 Estimation of the efficiency of diesel engine
4 結(jié)論
提出了基于雙因果鍵合圖模型的定量故障隔離以及參數(shù)估計(jì)方法,利用該方法對艦船主動(dòng)力裝置進(jìn)行了故障隔離以及參數(shù)估計(jì)仿真試驗(yàn),結(jié)果表明:
1)雙因果鍵合圖模型具有更加明確和靈活的因果路徑關(guān)系,通過對其進(jìn)行分析推導(dǎo)可以直接得到系統(tǒng)ARRs,不需要復(fù)雜的數(shù)學(xué)推導(dǎo)過程。
2)在現(xiàn)有的傳感器布置方案下,通過雙因果鍵合圖模型得到的系統(tǒng)FSM具有很好的故障診斷特性,艦船主動(dòng)力裝置中所有系統(tǒng)部件的故障都是可診斷和可隔離的。
3)鍵合圖LFT模型可以很好地進(jìn)行系統(tǒng)故障建模,將其與雙因果鍵合圖模型結(jié)合,可以方便地實(shí)現(xiàn)系統(tǒng)各種離線故障仿真,得到大量的系統(tǒng)故障數(shù)據(jù)。
4)基于雙因果鍵合圖模型的參數(shù)估計(jì)算法能夠?qū)崿F(xiàn)系統(tǒng)故障參數(shù)的估計(jì)并具有很好的實(shí)時(shí)性,在系統(tǒng)發(fā)生故障后,故障參數(shù)能夠得到及時(shí)的反饋。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測試與診斷(2014年5期)2014-03-01 01:14:21
