基于衍射重構技術的作物真菌病害孢子微型檢測裝置
2019-04-29 02:20:38陳馳原李國曉王愛英張榮標
農業機械學報 2019年4期
關鍵詞:檢測
楊 寧 陳馳原 李國曉 王愛英 張榮標 唐 健
(1.江蘇大學電氣信息工程學院, 鎮江 212013; 2.中國水稻研究所稻作技術研究與發展中心, 杭州 311401)
0 引言
作物真菌病害因其傳播速度快、危害大等特點給病害檢測預警帶來了巨大的挑戰[1-2]。真菌病害是由散布在空氣中的真菌孢子浸染水稻引起的[3-6]。因此,對空氣中孢子濃度的測定是病害流行分析和預警中不可或缺的部分[7]。
作物真菌病害的檢測方法歸結起來主要有免疫檢測法、核酸檢測法、微懸臂梁檢測法、分子生物學檢測法、形態學鑒定法等。免疫檢測法利用抗原和抗體特異性結合的原理,實現特定微生物濃度的快速檢測,精度較高[8]。核酸檢測法利用分子擴增技術,大大減少了檢測時間,且靈敏度較高。上述方法需要特異性抗體或引物以及專業的人員及設備,實現野外即時檢測的難度較大[9]。微懸臂梁檢測法是一種將敏感材料或受體分子修飾在微懸臂梁表面,對待檢目標氣體或液體分子進行吸附,造成微懸臂梁運動狀態改變來標定待檢物濃度的方法[10]。如NUGAEVA等[11]使用鍍金和未涂覆硅的微機械懸臂陣列,快速定量檢測了黑曲霉和釀酒酵母濃度。該方法具有高精度與高靈敏度的特點,但是微懸臂梁檢測法對檢測環境要求嚴格,當環境中的雜質污染物被吸附時,將影響最終的檢測結果,難以適應復雜的野外環境條件[12]。顯微圖像計數法由人工觀察顯微圖像并計算孢子數量,檢出限更低,檢測精度較高,克服了上述檢測方法的弊端,但檢測時間長、人力消耗大、數字化程度低[13]。而目前利用圖像形態學鑒定進行自動識別真菌孢子個數的相關技術也逐步出現,李小龍等[14]、齊龍等[15]利用形態學鑒定方法對捕捉的孢子實現準確計數,但該檢測法主要依賴野外采樣和實驗室觀測兩個步驟,滯后性較大,不能實現對作物真菌病害的早期預警。
姜玉英等[16]、雷雨等[17]將自動對焦顯微鏡集成到孢子捕捉儀上實現捕捉數量的大概計數,MELO等[18]利用神經網絡深度學習檢測方法對孢子進行分類計數,這些方法依舊需要借助高倍顯微鏡等昂貴的儀器進行輔助檢測,相較于顯微圖像計數法,提升了數字化水平,但是技術復雜,成本仍然較高,無法推廣實施。國內托普云農研制的孢子捕捉儀處于國際領先地位,但它仍然是基于傳統顯微圖像檢測方法,使用氣泵直接抽取空氣到捕捉儀內的顯微鏡下,搭載圖像采集卡的顯微鏡采集孢子圖像,然后傳輸到上位機對孢子進行識別,整個系統體積巨大、成本高昂,不適合大面積農業推廣與野外布置。
衍射技術多應用于血液檢測[19]、藻類檢測[20]和精子檢測[21]等生物醫學相關領域。LI等[22]根據惠更斯-菲涅爾衍射原理設計了基于衍射指紋的癌細胞活性檢測系統,該系統體積較大,使用不便。因為細胞培養環境純凈,所以每個衍射環均表示細胞,而病害孢子在野外傳播時,空氣環境復雜,有的衍射環可能表示其他雜質,所以不宜直接分析衍射環,需要重構后再分析,以便于專家直接標記孢子和評判裝置檢測結果準確性。拍攝細胞衍射圖像時,只需將細胞培養皿放置在系統內即可,而病害孢子在空氣中傳播,無法直接采樣放置到系統內檢測,所以需要富集裝置。針對孢子檢測的特點,本文將孢子的富集與衍射重構檢測相結合,減小裝置體積與質量,設計一種定時完成富集、進樣、拍攝、重構和檢測等系列功能于一體的裝置。
1 材料與方法
1.1 實驗材料
選用稻瘟病孢子作為研究對象,實驗樣本于2018年10月在中國水稻研究所采集。為了模擬稻瘟病孢子在空氣中的傳播狀態,利用氣溶膠發生器將稻瘟病孢子制成氣溶膠粒子,均勻釋放在體積為1 L的容器中。將氣泵分別與容器和檢測裝置相連,這樣容器中混有稻瘟病孢子的氣體可被抽集至涂有凡士林的PDMS薄片上用于圖像采集,空氣中病害真菌孢子實際濃度C的計算公式為
(1)
式中N——一次實驗中采集到的孢子個數
t——氣泵工作時間,s
V——氣泵流量,L/s
使用的微型氣泵流量為0.02 L/s,開展10組采樣實驗,并在顯微鏡下觀察每組采樣的孢子數,最后由式(1)得出樣本的平均濃度為100個/L,將此濃度視為標準單位濃度。為保證裝置中用于采樣的PDMS薄片可長期使用,只需將本次檢測到的孢子數減去前一次檢測到的孢子數即為本次實驗采集到的孢子數,無需每次更換。
1.2 衍射重構技術理論
1.2.1衍射成像裝置工作原理
傳統光學顯微鏡成像技術是基于光穿過透明物質時發生波長(顏色)和振幅(亮度)變化來實現的,肉眼通過顯微鏡直接觀察微生物等的形態。LED發出的光通過微孔轉換成相干光,從而實現相干照明。如圖1所示,LED光源發出的光經過其正下方的微孔后,產生部分相干光,部分相干光傳播l1距離后照射到樣本平面(PDMS薄片)上。樣本平面上樣本的支透光與樣本的散射光互相干涉并被其正下方相距l2的CMOS成像芯片拍攝下來,圖2為樣本的衍射全息圖。首先利用角譜理論對全息圖進行相位信息恢復,并基于恢復后的孢子圖像研究其形態學特征。
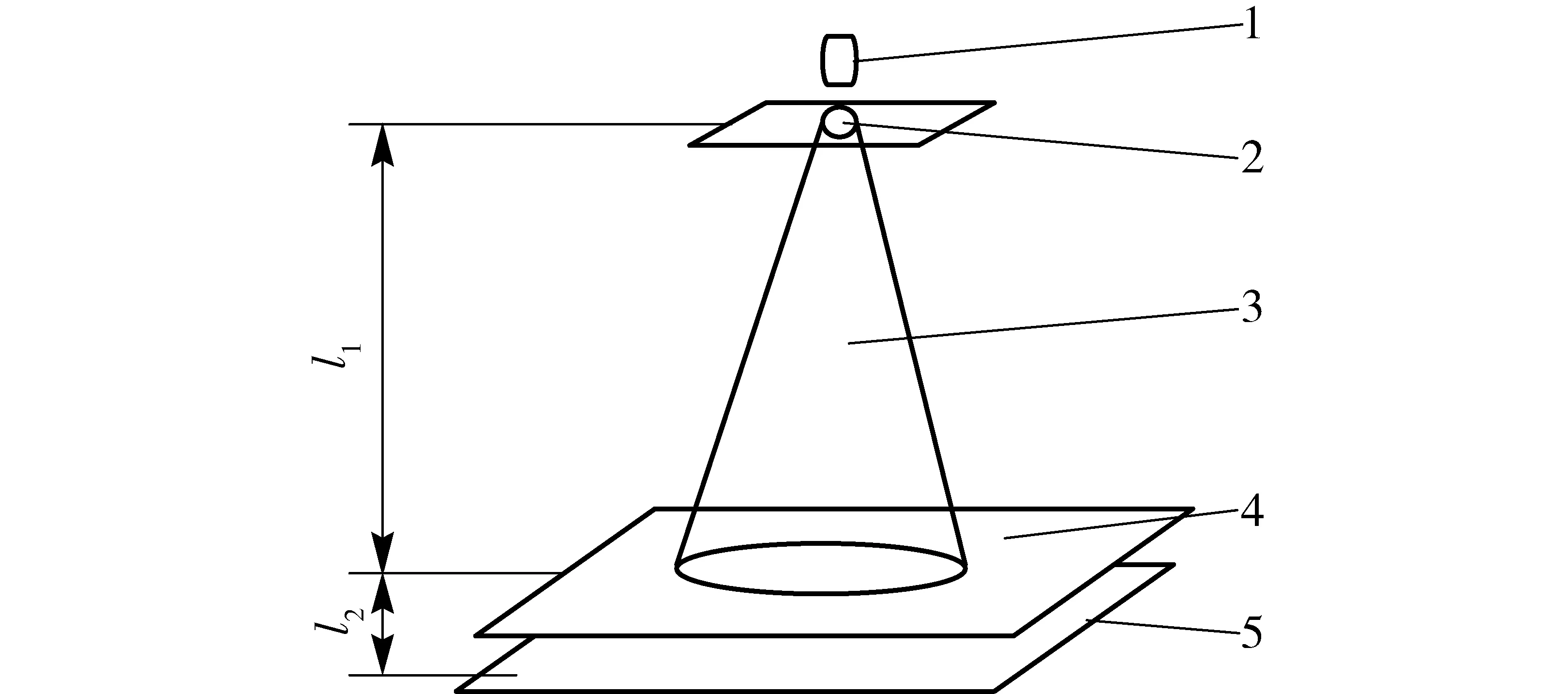
圖1 裝置成像原理示意圖Fig.1 Diagram of equipment imaging principle 1.光源 2.微孔 3.部分相干光 4.樣本平面 5.CMOS成像芯片
圖2 衍射全息圖像Fig.2 Hologram image
1.2.2角譜重構理論
在標量衍射的亥姆霍茲方程理論中,角譜理論從頻域的角度準確描述了光的衍射過程,將部分相干光場看作不同方向傳播的平面波分量,光傳播方向上任意一點的復振幅均被表示出來[23]。
振幅為U,波長為λ,方向余弦為cosα、cosβ、cosγ的波矢傳播的平面波復振幅為
(2)

U(x,y,z)=Uexp(2πi(xfx+yfy+zfz))
(3)
式中x、y——全息圖像素坐標
z——再現距離
α、β、γ——平面參考光波與空間的yoz平面、xoz平面、xoy平面的夾角
根據角譜理論,由角譜重構法得到的原像光場U(xi,yi,zi)的復振幅分布為
U(xi,yi,zi)=F-1(F(R(x,y)I(x,y))GAS(fx,fy))
(4)
其中

(5)
其中
式中F、F-1——傅里葉變換和逆傅里葉變換
I(x,y)——全息圖的強度分布
R(x,y)——參考光波振幅分布
GAS(fx,fy)——衍射在頻域的傳遞函數
角譜重構過程如圖3所示,其中圖3a是裝置采集的衍射全息圖,圖3b是計算機利用角譜法計算重構后得到的原像,可以看出孢子的輪廓被清晰地重構出來。
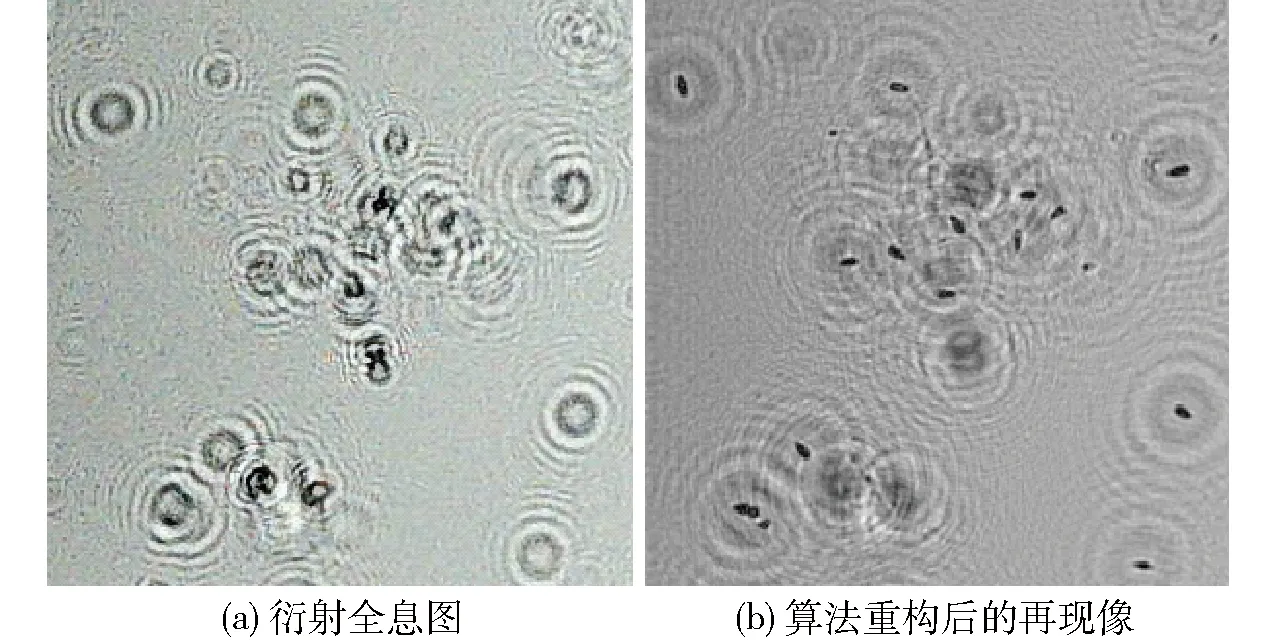
圖3 孢子重構圖像Fig.3 Spore reconstruction images
1.3 稻瘟病孢子再現像的目標識別
為了準確地識別出再現像中稻瘟病孢子,使用數字圖像處理技術對圖像進行濾波、閾值分割和特征提取等操作。
1.3.1中值濾波
圖4a為角譜重構之后得到的再現像,其中椒鹽噪聲和脈沖噪聲較多,針對該類圖像,選擇中值濾波進行降噪[24]。圖4b是中值濾波后圖像,選取3×3的窗口對重構圖像進行濾波,在降低噪聲的同時盡可能地減少了細節丟失。
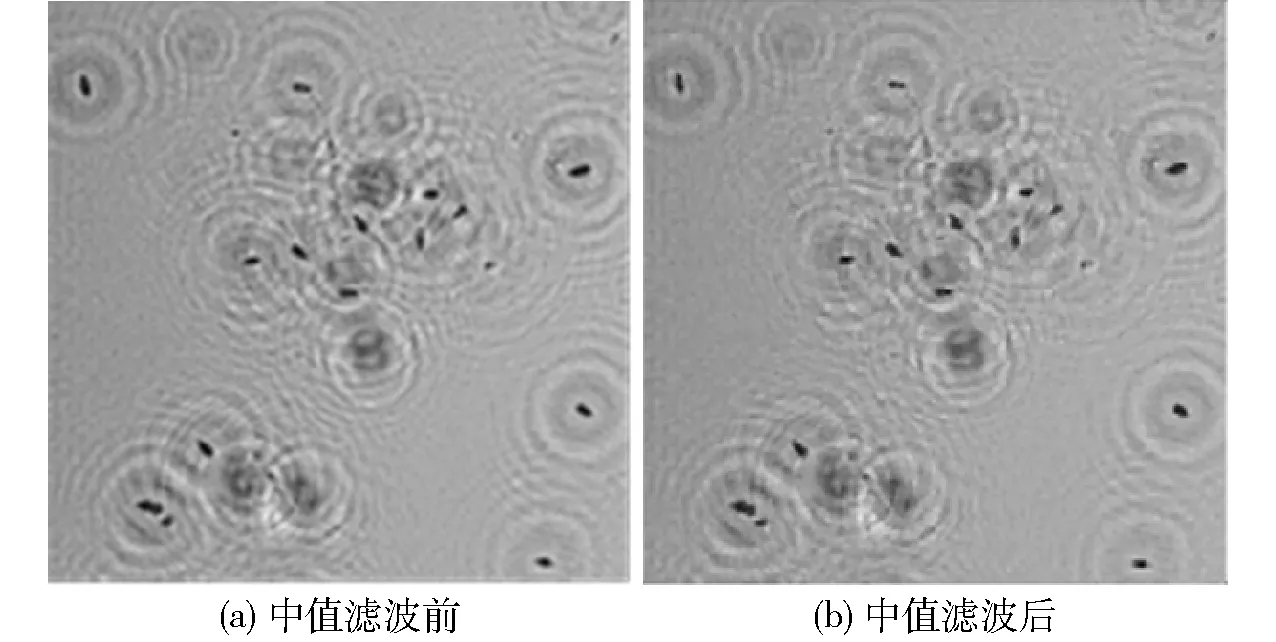
圖4 中值濾波Fig.4 Median filtering
1.3.2閾值分割
由圖5a知,檢測目標顏色與背景顏色相差較大,故可以采用閾值分割的方式將圖像分為背景區域和目標區域。預備試驗知孢子灰度主要分布在0~100之間,灰度較高部分均為背景。故本文采用枚舉法確定閾值,枚舉區間為0~100,步長為0.5,閾值分割流程如圖6所示,每次閾值加0.5,當閾值為76.5時,輪廓最為明顯,分割結果如圖5b所示。
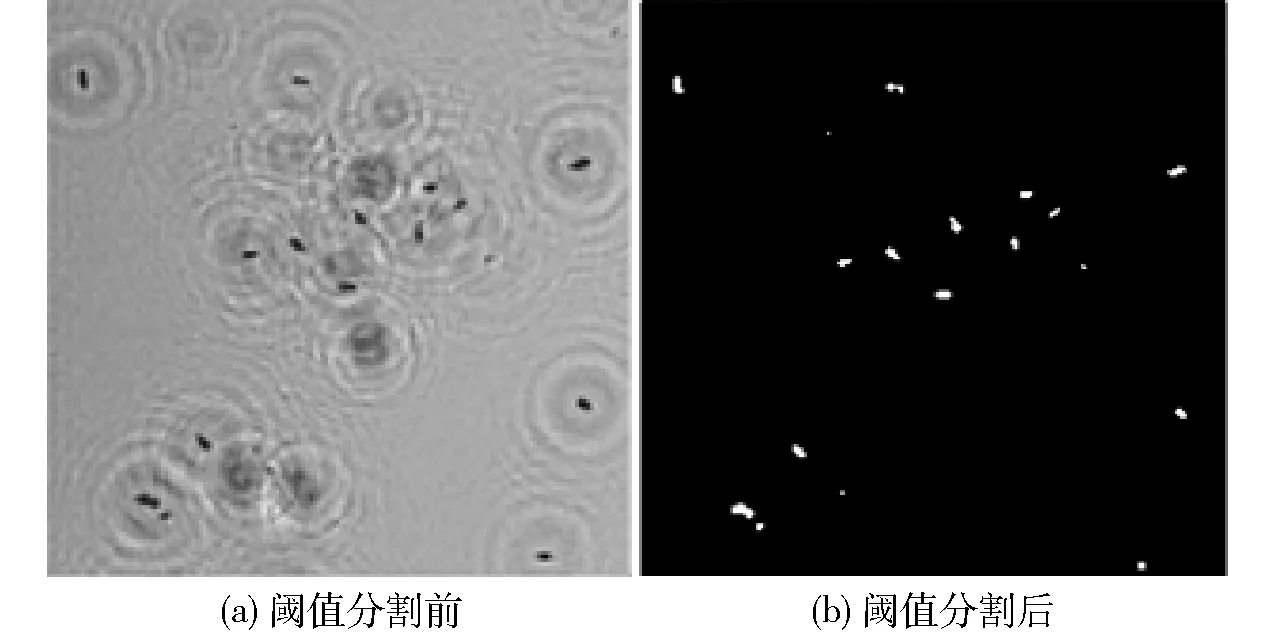
圖5 閾值分割Fig.5 Threshold segmentation
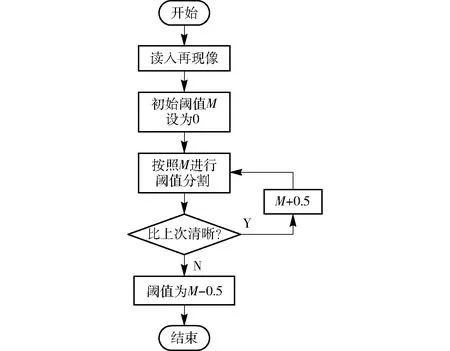
圖6 閾值分割流程圖Fig.6 Flow chart of threshold segmentation
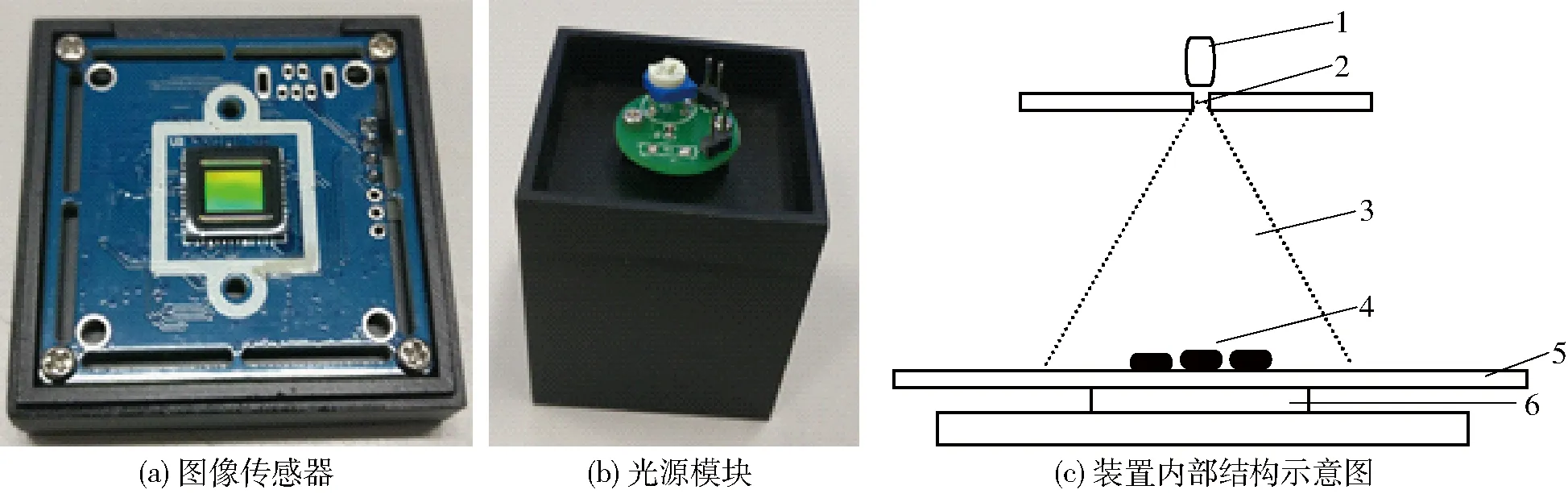
圖8 圖像采集與光源模塊結構Fig.8 Image acquisition and light source module 1.LED光源 2.微孔 3.部分相干光 4.樣本 5.PDMS薄片 6.CMOS模塊
1.3.3基于形狀特征的識別與計數算法
稻瘟病孢子具有獨特的形態特征(細長的梨形)和較為固定的尺寸范圍(長(15±5)μm,寬(7±2)μm)。因此,可以對重構后的稻瘟病孢子選擇面積(Area)、細度(Thinness ratio)兩個形態學參數進行稻瘟病孢子的識別和計數。其中面積A定義為目標區域所包含的像素數量,用于描述區域面積。細度T用于描述目標形狀的纖細程度,定義為
(6)
式中P——稻瘟病孢子的周長
測定50組共500個稻瘟病孢子重建后圖像的面積A和細度T,其中一組數據如圖7所示,矩形方框內為稻瘟病孢子。故將同時滿足A為10~30,且T為0.9~1.4的目標判定為稻瘟病孢子。
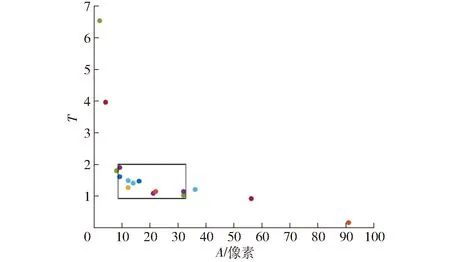
圖7 面積-細度特征二維圖Fig.7 Two-dimensional chart of area-thinness characteristic
1.4 真菌病害微型檢測裝置設計
1.4.1圖像采集與光源模塊設計
利用CMOS圖像傳感器采集衍射全息圖,結果如圖8a所示。選擇Aptina公司500萬像素的MT9P031型圖像傳感芯片,成像區域尺寸為5.70 mm×4.28 mm。由于LED光源是單色光,故定制了該芯片的黑白版來直接獲得灰度圖像,以提升圖像的信噪比。
光源模塊(圖8b)長度為4 cm(對應圖1的l1),其內部光路和部件位置如圖8c所示,微孔直徑設定為100 μm,選擇OSRAM公司的LA E65B型(LED波長617 nm),兩部件位于光源模塊正上方,從上往下發出部分相干光覆蓋CMOS模塊的感光區域;訂制的PDMS薄片厚度為1 mm(對應圖1的l2),此設計可以簡化光學設計,無需使用其他聚焦或校準透鏡就可以照亮CMOS圖像傳感器的全部視場[25]。
1.4.2真菌病害微型檢測裝置設計
檢測裝置如圖9所示,采用鋰電池供電。實驗時,計算機通過WiFi與圖像采集模塊通訊,并分析處理圖像數據。為了滿足氣傳孢子富集進樣和裝置內部避光的要求,設計了如圖10所示的迂回式氣路結構。氣體從裝置上方入口進入,沿著氣道從裝置兩側排出。
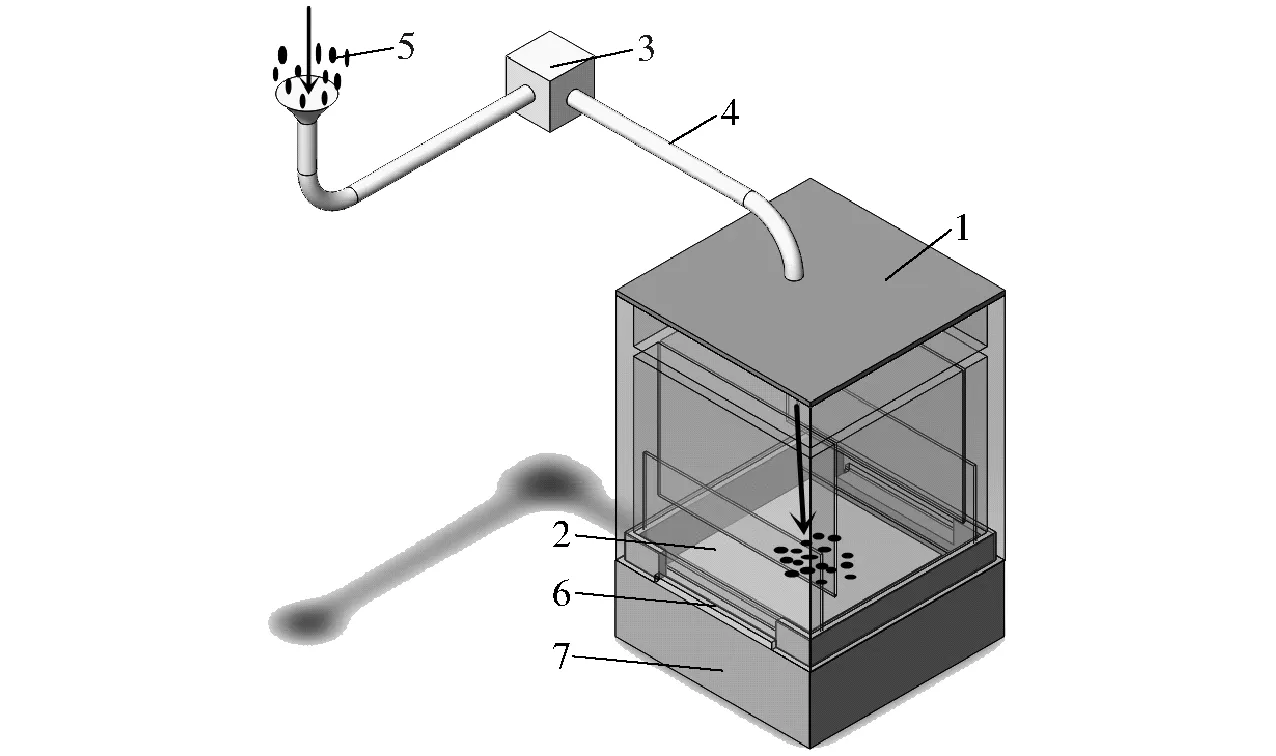
圖9 真菌病害微型檢測裝置示意圖Fig.9 Sketch of micro detection device for fungal disease 1.光源 2.PDMS薄片 3.氣泵 4.導管 5.孢子 6.出氣口 7.CMOS模塊
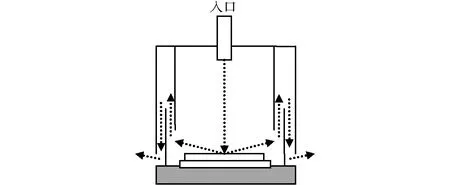
圖10 真菌病害微型檢測裝置氣路結構示意圖Fig.10 Pneumatic schematic of miniature detection device for fungal diseases
在實驗室中(溫度為(24±2)℃,相對濕度為(55±5)%,微塵數量在1 000個/m3以內)進行驗證實驗。首先打開氣泵將混有孢子的氣體吹集到涂有凡士林的PDMS薄片上。富集完成后,開啟LED光源和CMOS芯片對PDMS薄片上的樣本進行拍照獲取衍射全息圖,并將圖像傳至計算機分析處理。裝置初步實現對病害真菌孢子進行定時富集、進樣、拍攝,以及對圖像進行重構和檢測等操作。
2 結果與分析
為了評價本文裝置的準確性,以及其他環境雜質等干擾物對稻瘟病孢子檢測的影響,用稻瘟病孢子(中國水稻研究所提供)、雜質(主要包括微顆粒、菌絲等物質)進行檢測實驗,將本裝置的計數結果與人工計數結果進行比較。
圖11表明了PDMS薄片重復使用時的孢子檢測準確率變化情況,當孢子累計數量分別在2 500個和3 000個左右時,準確率約為94%和90%,超過3 000個時,孢子重疊率較高,準確率明顯下降。據文獻[26]可知,一季水稻成長期為110 d左右,其中有大約一半的時間孢子濃度為0,剩下的一半時間中,約70%的時間內孢子濃度不到100個/m3,少數幾天孢子濃度超過500個/m3。該裝置每天工作2 h(孢子捕捉儀在凌晨孢子萌發時開啟[27]),通常情況下,在孢子濃度為100個/m3時,裝置使用110 d(一季水稻成長期)時,收集的孢子不到2 000個,故本裝置無需更換PDMS薄片即可滿足一季水稻監控預警需求。圖12是一組實驗結果,其中稻瘟病孢子輪廓用紅色線條和數字標記,圖12b是對圖12a矩形框內圖像的局部放大。稻瘟病孢子顯微人工計數結果和自動計數結果如表1所示,誤差(|N-M|/M×100%)最大不超過10%,平均誤差5.91%,均屬于可接受范圍。圖13是對兩種方法進行Bland-Altman分析的結果,所有點均在95%一致性區間以內,一致性較好。實驗結果表明,基于衍射重構技術的作物真菌病害微型檢測裝置可以檢測并識別稻瘟病孢子,其自動計數結果與人工計數結果高度線性相關(決定系數R2為0.99),平均誤差為5.91%,在實驗室條件下具有較好的準確性。
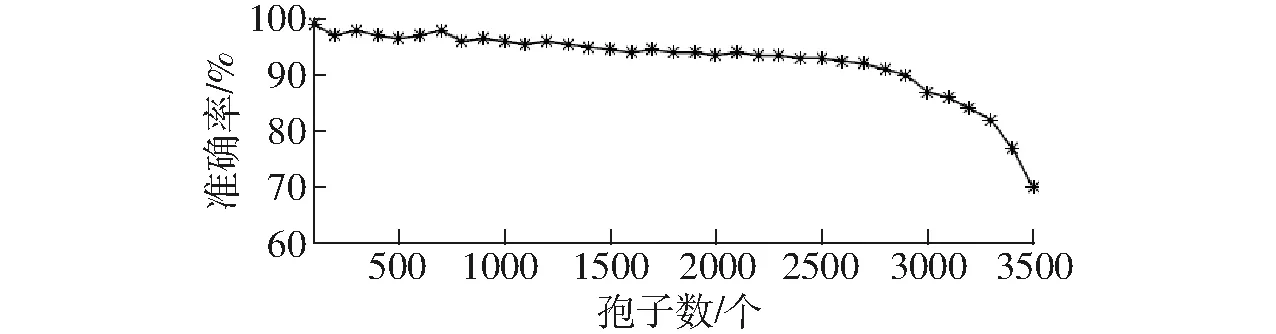
圖11 薄片重復使用時孢子檢測準確率Fig.11 Detection accuracy of repeated PDMS using
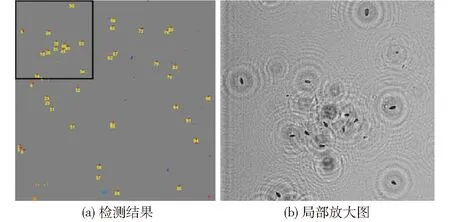
圖12 裝置檢測結果Fig.12 Diagram of equipment test result

表1 人工計數與裝置自動計數結果Tab.1 Manual counting and device automatic counting results
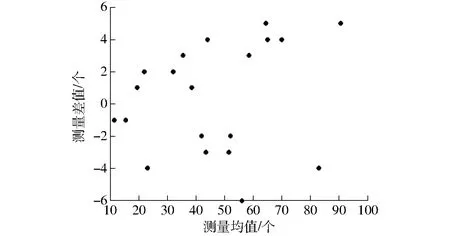
圖13 Bland-Altman方法分析Fig.13 Analysis by Bland-Altman method
3 結束語
提出了一種基于衍射重構技術的作物真菌病害孢子檢測方法,依據惠更斯-菲涅爾原理設計了作物真菌病害孢子微型檢測裝置。實驗結果表明,所設計裝置的檢測結果和人工計數結果高度線性相關,決定系數為0.99,平均誤差為5.91%,具有較好的準確性。裝置體積為4 cm×4 cm×5 cm,且在實驗室條件下測試可實現定時富集、進樣、拍攝、重構和檢測功能,為微型低成本作物真菌病害早期預警系統的研發提供了解決方案。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
