基于混合卡爾曼濾波器組故障傳感器定位方法
2019-05-05 07:19:56靳成學
航空發動機 2019年2期
梁 紅,靳成學
(1.中國核電工程有限公司鄭州分公司,鄭州450052;2.中國船舶重工集團公司第七一三研究所,鄭州450015)
0 引言
對于傳感器故障診斷問題,傳統方法是采用降維卡爾曼濾波器組[1-5]來解決。Kobayashi使用1組卡爾曼濾波器來解決發動機傳感器的故障診斷與隔離問題,每個濾波器用來監視某一特定傳感器,通過濾波器的不同表現完成故障傳感器的定位。在在線故障診斷過程中,為保障其診斷可靠性,系統必須具有對存在于真實環境中的非故障信號的魯棒性,否則可能導致誤報。此外,線性卡爾曼濾波器的基準數據是針對蛻化前的發動機建立的,而發動機在運行過程中會出現性能蛻化的狀況[6-8]。
為了避免基準數據與蛻化后的發動機輸出之間的偏差導致的干擾,設計了混合卡爾曼濾波器(Hybrid Kalman Filter,HKF),包括機載模型(On Board Engine Model,OBEM)和線性卡爾曼濾波器(Linear Kalman Filter,LKF)[9-11]。濾波器的基準值由與真實發動機并行運行的機載模型來提供。同時,性能蛻化因子由地面狀態監視系統估計,根據飛行數據離線更新,從而實現機載模型的輸出修正,使其追蹤真實發動機的可測輸出[12],使得機載模型能夠為后續的故障診斷提供更為貼近真實發動機的基準數據。
1 混合卡爾曼濾波器組的搭建
基于降維卡爾曼濾波器組的故障傳感器定位,本質上是1種基于模型的故障診斷方法,具體的實現過程有殘差產生和殘差決策2個階段。殘差產生是指基于系統模型構造1個或1組函數來反映故障量的大小;殘差決策是基于已生成的殘差值,制定恰當的閾值和決策規則來尋找故障源的過程[13]。混合卡爾曼濾波器結構如圖1所示。混合卡爾曼濾波器輸出的殘差包括2部分:卡爾曼濾波器估計輸出與機載模型健康基準輸出之間的殘差加權平方和;發動機實際輸出與機載模型健康基準輸出之間的殘差加權平方和。混合卡爾曼濾波器中殘差WSSR的計算方式如圖2所示。
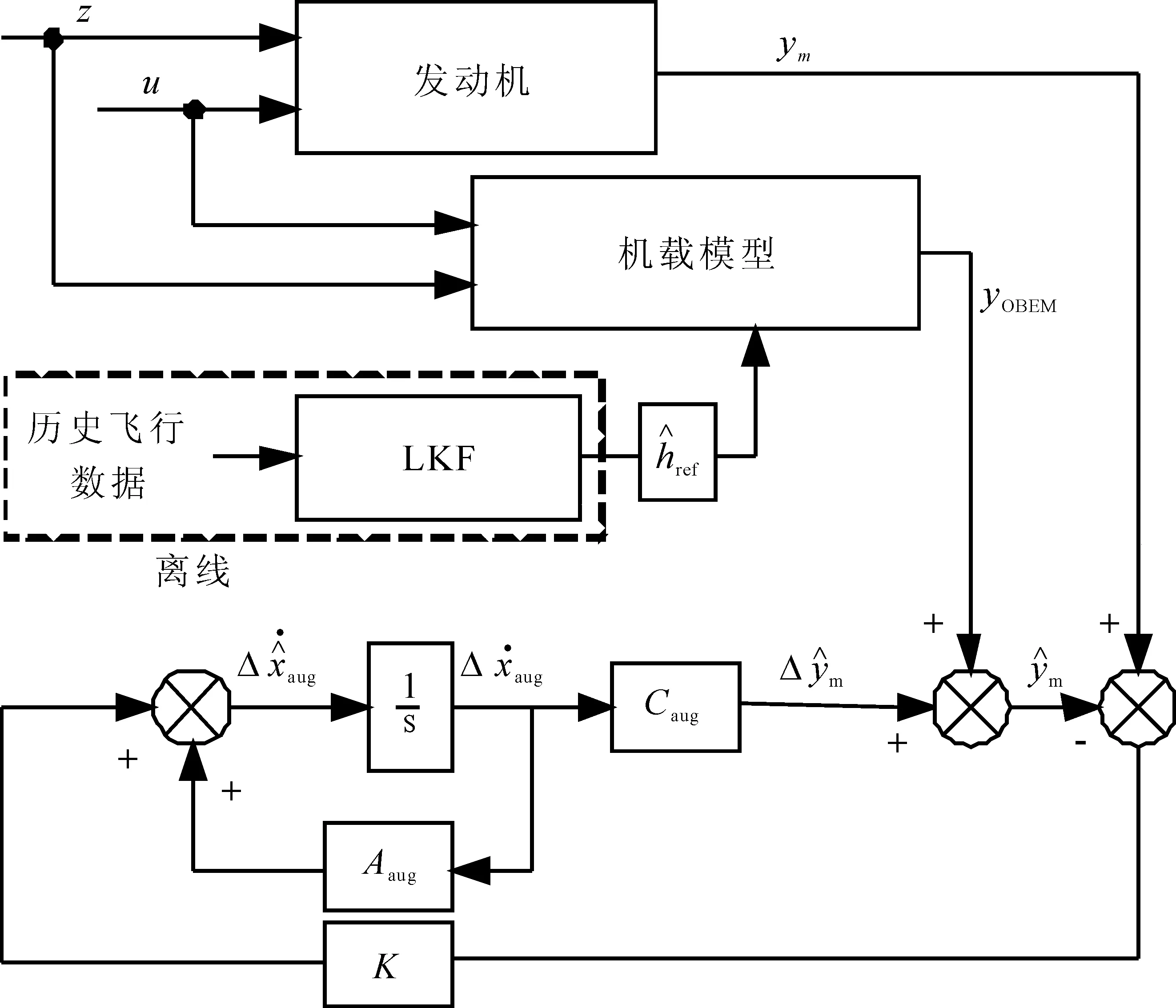
圖1 混合卡爾曼濾波器結構
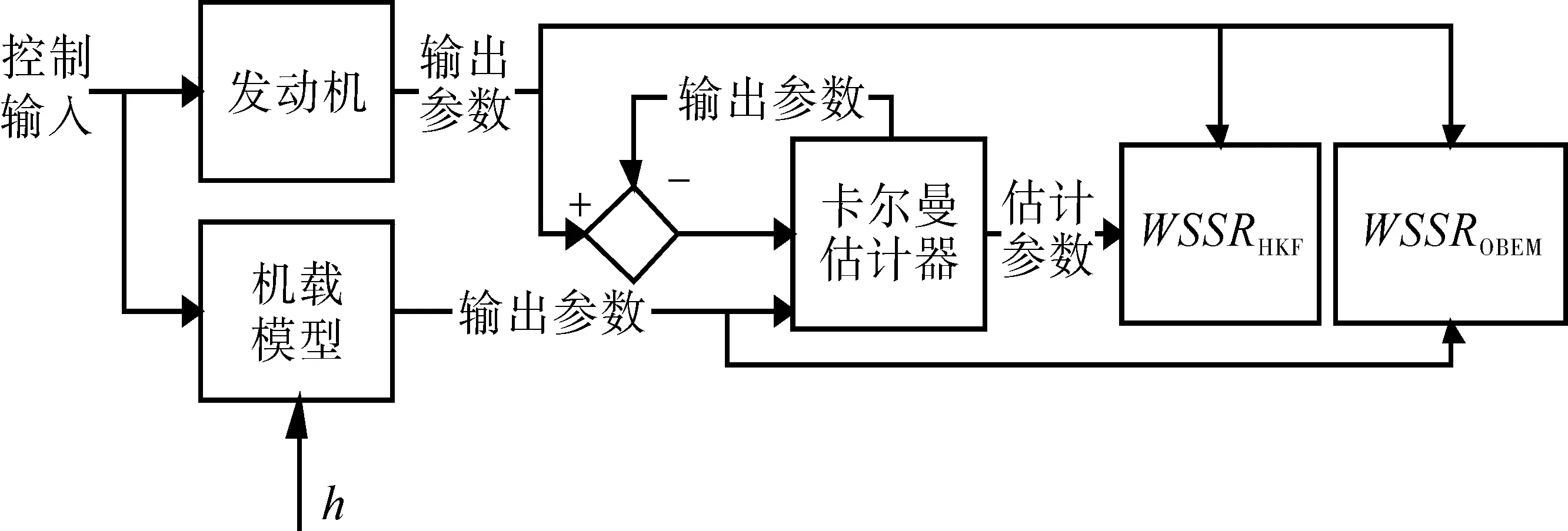
圖2 濾波誤差加權平方和WSSR指示故障原理
降維混合卡爾曼濾波器組原理如圖3所示。在濾波器組中,濾波器的數量與傳感器的數量相同,每個濾波器都缺少1個傳感器信號輸入。與傳統的濾波器組相比,混合卡爾曼濾波器增加了對應的機載模型健康基準信號,與傳感器輸出一樣,OBEM的輸出也是將除去被監測的可測參數后剩余可測參數的輸入子集作為濾波器輸入。OBEM輸出和發動機傳感器測量值是一一對應的。
降維卡爾曼濾波器組中第i個卡爾曼濾波器對應的WSSRi為

降維混合卡爾曼濾波器組的故障定位過程與健康蛻化估計過程如圖4所示。第1步是由估計值和傳感器測量值的偏差產生殘差信號,第2步是殘差與閾值的比較。基于Hajiyev等[15]提出的1個假設,如果傳感器有故障,則該傳感器的測量值將會大大偏離正常值。若卡爾曼濾波器在估計過程中受到故障傳感器信息的不利影響,該卡爾曼濾波器產生的殘差值WSSR便會顯著增大;反之殘差值應該小到幾乎為0。因此,在第i個傳感器發生故障的情況下,第i個HKF沒有接收到第i個傳感器的輸入,但其余HKF均受到第i個傳感器的錯誤信息影響,則第i個卡爾曼濾波器計算所得的WSSR會顯著小于其余WSSRHKF的值。以上就是傳感器故障定位的原理。如果第i個卡爾曼濾波器計算的WSSR的值大于其對應的閾值,說明除了傳感器故障外,機載模型健康基準與實際發動機之間還存在由于發動機部件健康蛻化導致的偏差,需要根據該卡爾曼濾波器估計所得的健康參數定位蛻化部件和確定蛻化量大小,并將估計的健康蛻化信息傳輸給OBEM從而完成在線調節機載模型健康基準的過程,使得機載模型健康基準計算與發動機可測輸出重新匹配。
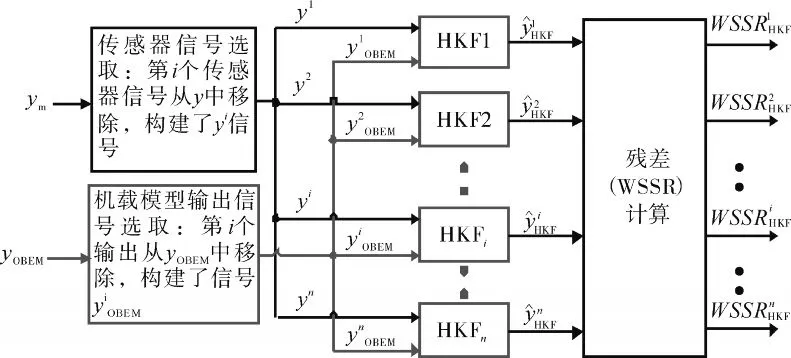
圖3 降維混合卡爾曼濾波器組原理
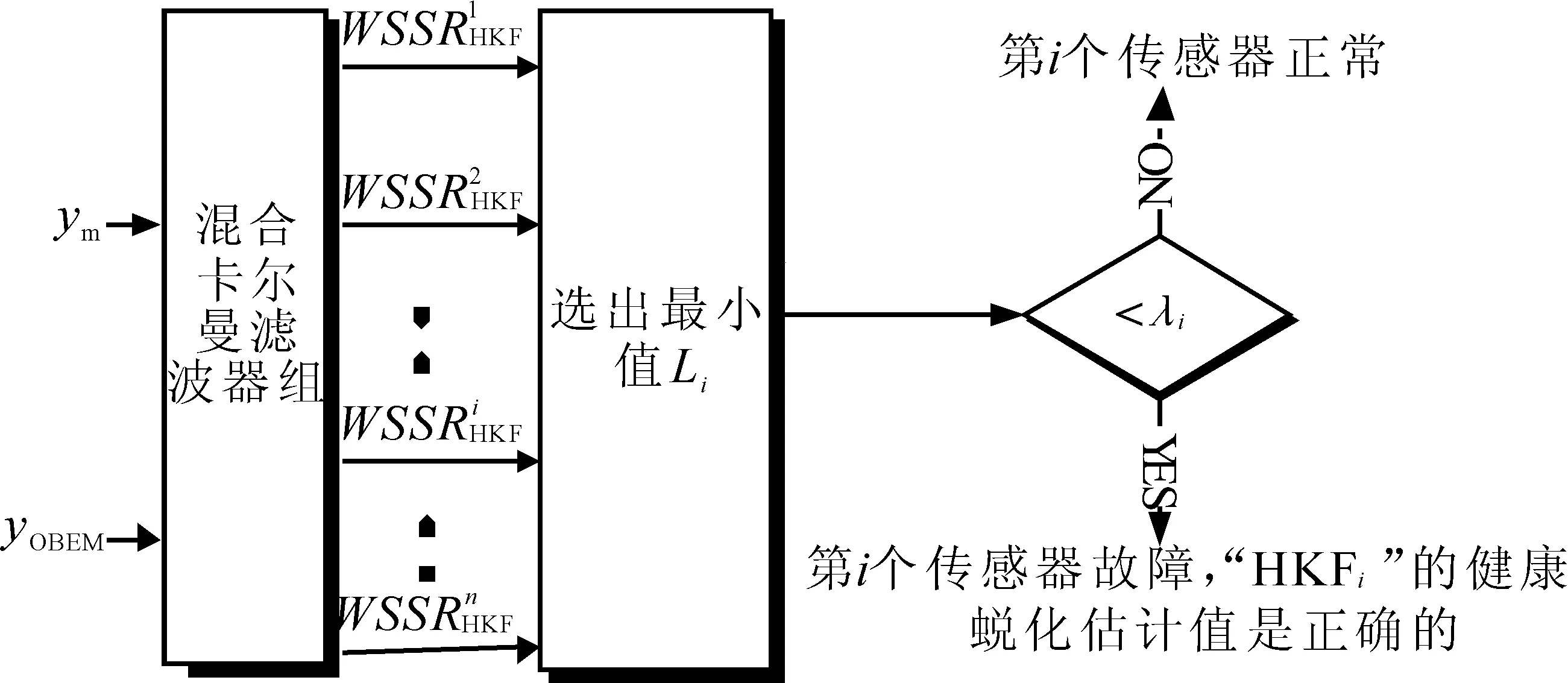
圖4 定位及篩選邏輯
前面多構建的混合卡爾曼濾波器組是針對單一傳感器故障構建的。針對多個傳感器故障的情況,需要引入多重故障監測系統,其診斷原理與單故障診斷系統的相同。
2 混合卡爾曼濾波器組的仿真驗證
第1組仿真將使用過渡態工況作為示例,說明混合卡爾曼濾波器在過渡態下的估計精度優勢。機載模型健康基準采用雙軸渦扇發動機非線性模型,在MATLAB平臺下進行在線故障診斷仿真。在t=1 s時風扇效率階躍下降1%,高壓壓氣機效率同時階躍下降1%,而供油量增加0.2 kg/s。在過渡態下混合卡爾曼濾波器和線性卡爾曼濾波器的估計結果如圖5所示。
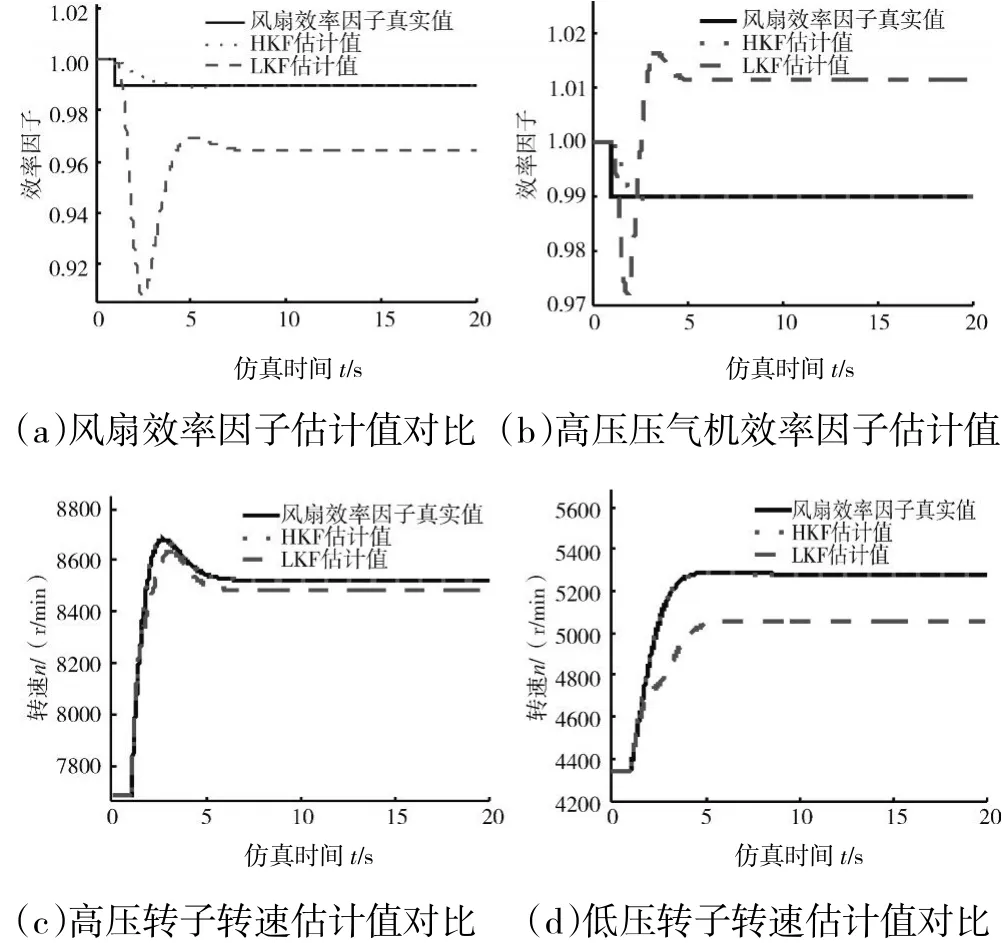
圖5 混合卡爾曼濾波器和線性卡爾曼濾波器在過渡態下的驗證對比
從圖中可見,在過渡態下混合卡爾曼濾波器的估計精度較高,說明混合卡爾曼濾波器能適應更加復雜的情況。
第2組仿真用于驗證混合卡爾曼濾波器組的故障定位能力。在t=1 s時風扇效率階躍下降1%,高壓壓氣機效率同時階躍下降1%。其他輸入和健康參數保持在原來的狀態。同時,監測發動機風扇出口總壓的傳感器發生了故障。降維濾波器計算的對應傳感器的殘差加權平方和的仿真結果如圖6所示。
從圖中可見,監測風扇出口總壓傳感器的濾波器輸出殘差幾乎保持不變,其余殘差變化很大,說明航空發動機風扇出口總壓傳感器發生了故障。成功定位了故障傳感器。

圖6 各降維濾波器計算對應傳感器的殘差加權平方和
3 結論
本文建立了用于故障傳感器定位的混合卡爾曼濾波器組,該濾波器組能夠在過渡態下保證估計精度,而且能有效定位故障傳感器。相關的仿真結果表明,在發動機健康蛻化與傳感器故障并存的情況下,混合卡爾曼濾波器組能夠根據不同卡爾曼濾波器的表現定位故障傳感器,并獲得較為準確的健康蛻化估計結果。證明了混合卡爾曼濾波器組的適用性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
電子設計工程(2014年6期)2014-02-27 11:56:54