履帶車輛試驗臺架負載模擬技術標定方法研究*
2019-05-07 09:03:26呂浩亮吳鵬輝周曉軍楊辰龍
汽車工程 2019年4期
呂浩亮,王 喆,吳鵬輝,周曉軍,楊辰龍
(1.浙江大學機械工程學院,流體動力與機電系統(tǒng)國家重點實驗室,杭州 310027;2.浙江大學機械工程學院,浙江省先進制造技術重點實驗室,杭州 310027)
前言
履帶車輛因其復雜條件下的優(yōu)越性能,被越來越廣泛地運用于兵器、農(nóng)業(yè)和工程建設領域。而履帶車輛的負載模擬試驗臺架技術因其可以提供方便、有效、逼真的試驗環(huán)境而受到越來越廣泛的運用。在試驗臺架中,通過修改不同參數(shù),即可檢驗車輛在不同溫度、濕度和地面條件下的動力輸出、排放性能、制動性能等試驗[1]。但只有在加載系統(tǒng)所模擬的車體慣量和地面負載與真實情況一致的條件下,負載模擬研究試驗才有意義[2]。目前,為克服傳統(tǒng)慣性質(zhì)量飛輪模擬區(qū)間窄且無法做到無級模擬的問題[3],大多研究者采用機械慣量電模擬(下文簡稱電慣量)的方法,利用電機負載代替機械慣量。
電機系統(tǒng)及相應附件作為慣量模擬設備時,由于受到環(huán)境(包括溫度、濕度、潤滑油清潔度)、裝配誤差、結(jié)構(gòu)損傷和機械熱變形等的影響,設備的附加阻力總是不斷變化。由于電機控制的滯后性,這種變化引起的誤差很難被消除[4-5]。因此無論采用什么控制方式,慣量模擬的誤差總是難以避免的[6]。
目前雖然有較多研究者對電慣量模擬開展了諸多研究工作,但對其模擬精度的研究均缺乏一個統(tǒng)一的標準[7-9]。本文中根據(jù)機械慣量電模擬理論,建立了一套實際路面工況下的履帶車輛動力學模型,利用速度跟蹤法建立了臺架試驗臺控制模型。利用高精度機械慣量飛輪組標定電慣量的方法,建立了一套適用于多種模擬工況的電慣量模擬精度標定方法,對該控制策略下的模擬精度和響應時間進行了標定。
1 系統(tǒng)結(jié)構(gòu)與原理
履帶車輛負載模擬試驗臺架系統(tǒng)結(jié)構(gòu)如圖1所示,系統(tǒng)主要由負載系統(tǒng)和驅(qū)動系統(tǒng)兩部分組成。負載系統(tǒng)通過變速器和傳動軸連接至被試車輛,傳動軸末端經(jīng)過轉(zhuǎn)矩儀和編碼器連接至履帶車輛主動輪。這種結(jié)構(gòu)下,起動被試車輛踩下油門,編碼器收到主動輪輸出的轉(zhuǎn)速信號,轉(zhuǎn)矩儀得到的負載信號包含整個負載系統(tǒng)的機械慣量和電模擬慣量在主動輪加速度下?lián)Q算獲得的轉(zhuǎn)矩信號。通過結(jié)合轉(zhuǎn)矩信號與實車動力學模型,可推算主動輪的目標轉(zhuǎn)速,利用電機跟蹤該轉(zhuǎn)速,從而達到使被試車輛主動輪受到與實際路面駕駛相同負載的目的。
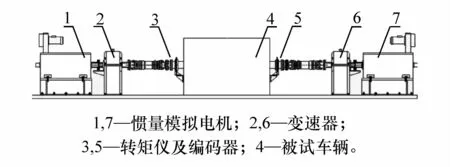
圖1 履帶車輛負載模擬試驗臺架
為研究電慣量模擬的準確性,移開中間被試車輛,利用傳動軸和變速器連接兩端被試電機如圖2所示。此時,右側(cè)模擬端采用速度跟蹤法模擬慣量負載,左側(cè)驅(qū)動電機施加一個預設載荷,根據(jù)公式

在已知系統(tǒng)轉(zhuǎn)矩的條件下,對系統(tǒng)轉(zhuǎn)速求導獲得系統(tǒng)瞬時加速度,即可求出瞬時電機模擬的慣量。以實測慣量比較標準慣量,達到標定電慣量的目的。
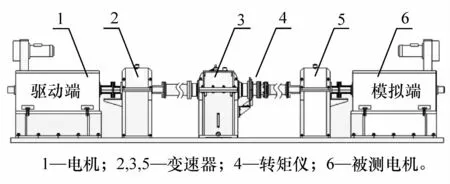
圖2 電慣量標定試驗臺架結(jié)構(gòu)
2 系統(tǒng)建模與控制
2.1 履帶車輛行駛動力學模型
履帶車輛行駛過程中受到驅(qū)動力、慣性力和行駛阻力的相互作用,其受力方式如圖3所示。車身所受力在主動輪處達到了力矩平衡[10]。
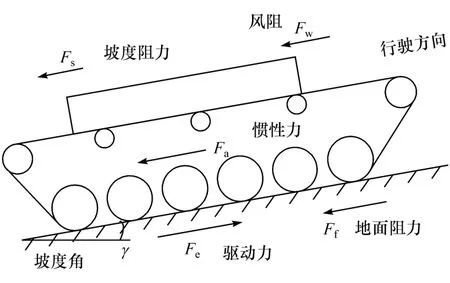
圖3 履帶車輛受力分析
將車身所受的力等效到主動輪,可得主動輪受力公式為

式中:Te為車輛驅(qū)動力矩;Ta為車輛慣性力矩;Ts為坡度阻力矩;Tw為風阻力矩;Tf為地面阻力矩;Je為整車慣量集中至車輛主動輪上的等效慣量;αd為車輛輸出軸的角加速度。
對式(2)做拉氏變換得到車輛動力學方程:

式中:ωem(s)為主動輪轉(zhuǎn)速;Gem(s)為履帶車輛以受力為輸入、主動輪轉(zhuǎn)速為輸出的傳遞函數(shù)。
2.2 履帶車輛等效慣量建模
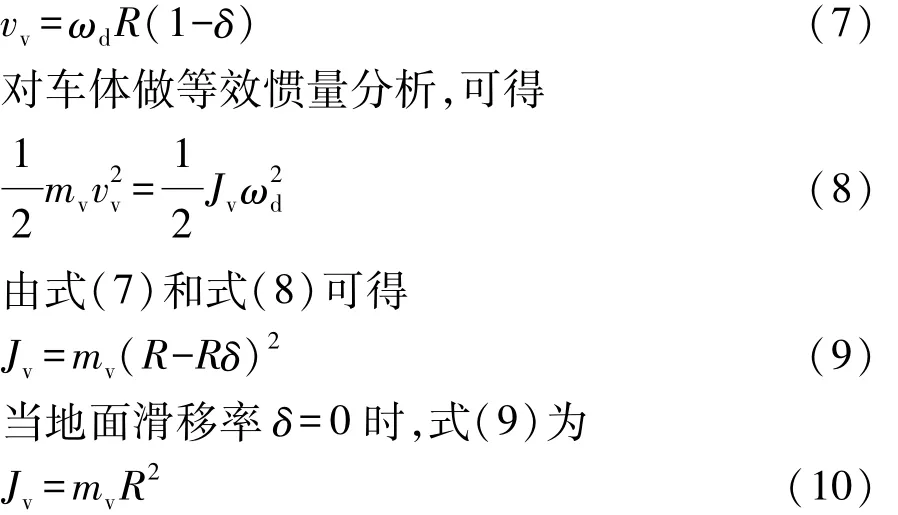
由式(4)可知,為求 ωem(s)須將整車慣量等效至主動輪。對履帶車輛整車慣量做等效分析可得[11]
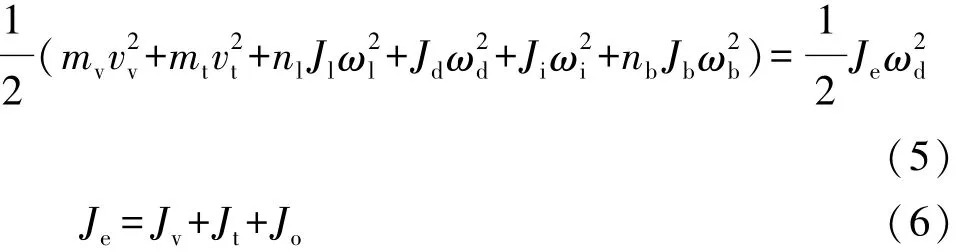
式中:mv為整車車身質(zhì)量(不包括履帶);vv為車身速度;mt為履帶質(zhì)量;vt為履帶速度;nl為負重輪數(shù)量;Jl為負重輪繞軸心轉(zhuǎn)動的慣量;ωl為負重輪的角速度;Jd為驅(qū)動輪繞軸心轉(zhuǎn)動的慣量;ωd為驅(qū)動輪的角速度;Ji為誘導輪繞軸心轉(zhuǎn)動的慣量;ωi為誘導輪的角速度;nb為托帶輪的數(shù)量;Jb為拖帶輪繞軸心轉(zhuǎn)動的慣量;ωb為拖帶輪的角速度;Je為整車當量慣量;Jv為車身當量慣量(不包括履帶,輪體轉(zhuǎn)動慣量);Jt為履帶當量慣量;Jo為其它當量慣量。
對驅(qū)動輪做等效慣量分析,可得
由于履帶是不規(guī)則體,并且各部分速度不一樣,所以把履帶拆成上、下、前、后4部分來計算。假設履帶接地部分與地面無相對滑動,即地面滑移率為0,則可以不考慮接地部分履帶的慣量。而正常行駛過程中由于惡劣地面條件(如泥沼、雪地等),特殊工況(如轉(zhuǎn)彎),履帶與地面滑移率通常不為0,因此需要考慮全部履帶慣量。
假設,定義 vtup,vtb,vtf,vtr分別為上、下、前、后部分履帶的絕對速度;vtupe,vtbe,vtfe,vtre分別為上、下、前、后部分履帶的牽連速度;vtupr,vtbr,vtfr,vtrr分別為上、下、前、后部分履帶的相對主動輪的相對速度,則可獲得各段履帶速度分析圖,如圖4所示。
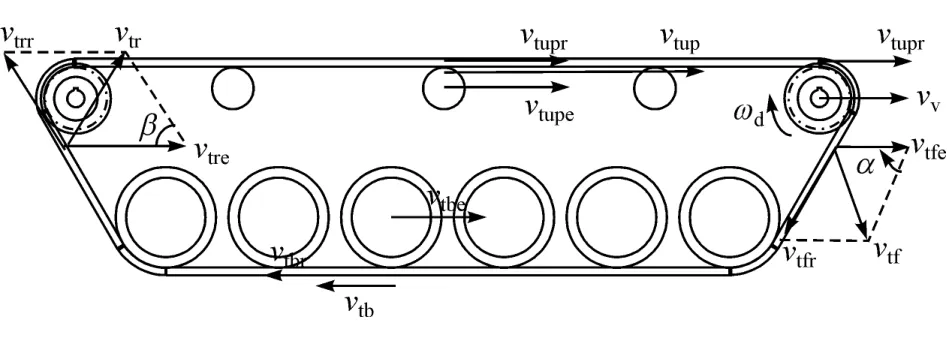
圖4 各段履帶速度分析
根據(jù)圖4可知:
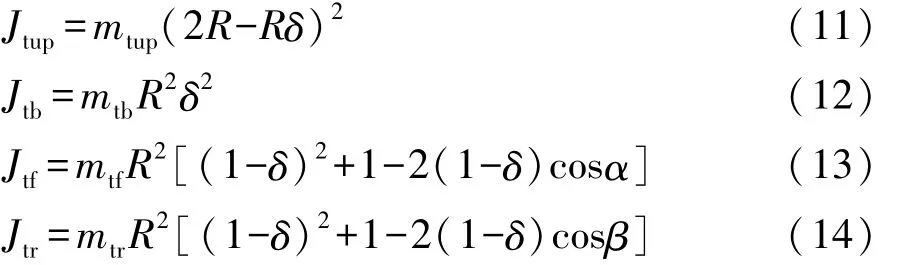
式中:mtup,mtb,mtf,mtr分別為上、下、前、后部分履帶的質(zhì)量;Jtup,Jtb,Jtf,Jtr分別為上、下、前、后部分履帶的當量慣量。
從而可知履帶部分在驅(qū)動輪上的等效慣量為

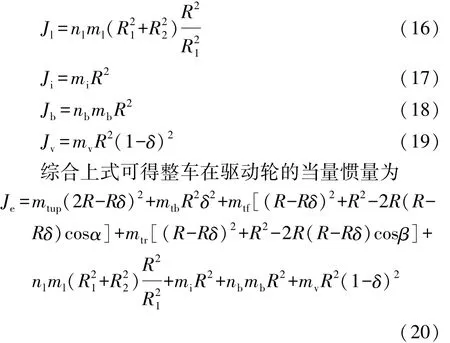
負重輪、誘導輪、托帶輪和車身在驅(qū)動輪上的當量慣量分別為
2.3 加載系統(tǒng)控制策略
根據(jù)測得的被試系統(tǒng)輸出轉(zhuǎn)矩Te,通過計算獲得的動力學模型 Gem(s)得到實際工況運行轉(zhuǎn)速ωem,通過控制器C(s)使臺架試驗的被試系統(tǒng)在試驗臺加載轉(zhuǎn)矩Tl的作用下跟蹤ωem,則臺架以Te為輸入,臺架運行轉(zhuǎn)速ω為輸出[12-13],速度跟蹤原理和系統(tǒng)控制框圖分別如圖5和圖6所示。
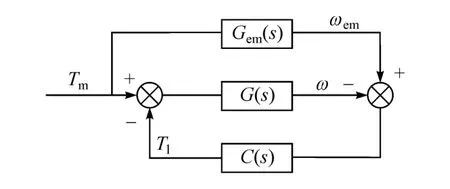
圖5 速度跟蹤法原理圖
3 電慣量模擬精度標定
3.1 標準慣量的校準
在電慣量模擬試驗中,影響試驗結(jié)果準確性的主要因素為慣量模擬精度和系統(tǒng)的響應時間。本文中運用一組已標定的高精度標準慣量箱對電慣量進行標定。已知飛輪組某一級標準慣量為Js,假設待標定的傳動部件慣量為Jb,電機模擬慣量為Ja。使Jb±Ja=Js,利用相同的電機以相同轉(zhuǎn)矩分別驅(qū)動標準慣量箱和慣量模擬電機獲得速度上升曲線,兩組驅(qū)動的試驗結(jié)果完成對電慣量模擬的標定。
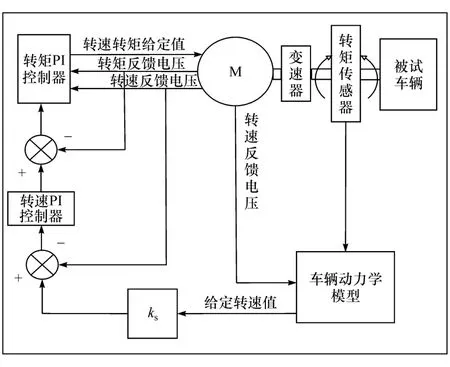
圖6 電慣量模擬系統(tǒng)控制框圖
標準慣量(飛輪箱)試驗的機械結(jié)構(gòu)如圖7所示,該裝置用于校準左側(cè)系統(tǒng)的標準慣量值。根據(jù)公式T=Jα,當輸入的轉(zhuǎn)矩值為恒定轉(zhuǎn)矩時,系統(tǒng)的轉(zhuǎn)速應該按照恒定的角加速度α勻速上升,因此可以通過輸入的轉(zhuǎn)矩和測量得到的速度曲線計算得到系統(tǒng)的標準慣量。在實際試驗中,由于被測系統(tǒng)存在阻力矩,所以公式修改為Tt-Td=Jα。已知阻力矩的大小主要與轉(zhuǎn)速有關[14-15],當系統(tǒng)轉(zhuǎn)速較高時,系統(tǒng)的阻力矩基本相等。所以可采取改變不同的驅(qū)動轉(zhuǎn)矩測量對應的角加速度,通過兩組方程來得到被測系統(tǒng)的標準慣量。
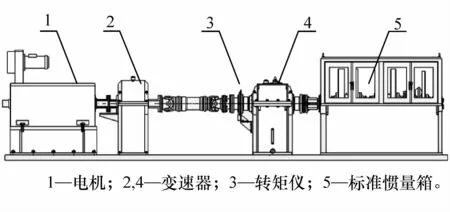
圖7 標準慣量校準試驗結(jié)構(gòu)
如圖8所示,在同一組試驗中分別設置兩個加速階段,其驅(qū)動力矩分別為Tt1和Tt2。在兩段加速曲線中同時取轉(zhuǎn)速穩(wěn)定上升的階段r1~r2這兩個階段的加速值分別為α1和α2。由于兩段曲線的速度區(qū)間相同,則認為其阻力矩Tdi相等,取兩段數(shù)據(jù)例如Tt1與 Tt2做差(式(21)-式(22))可計算出標準慣量盤自身慣量值Js,以驗證標準慣量模擬的準確性。
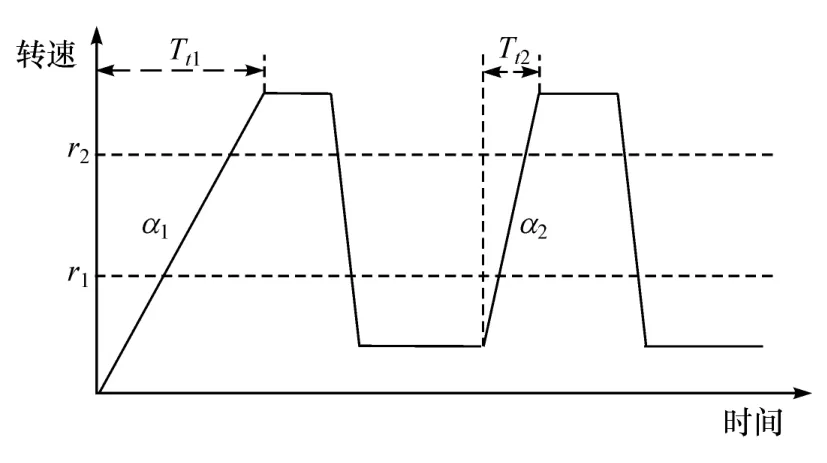
圖8 慣量校準示意圖

標準慣量箱的實際結(jié)構(gòu)為大慣量飛輪組,其慣量模擬區(qū)間為50~1 000 kg·m2。為提高慣量模擬上限,為電慣量模擬標定提供更多數(shù)據(jù)參考,為慣量箱配備速比為1∶2.36和1∶6.48升速比的變速器提高被標設備的等效慣量。即代表通過飛輪箱不同的慣量組合可以模擬到的慣量范圍為255~42 000kg·m2。這種模擬方法雖然為有級模擬,但是通過數(shù)據(jù)處理可完全反映該區(qū)間內(nèi)的數(shù)據(jù)曲線,達到比對的要求。以這種方法,對1∶2.36傳動比下的400 kg·m2慣量箱(等效慣量為2 227.84 kg·m2)進行慣量校準試驗,得到試驗結(jié)果如圖9和表1所示。
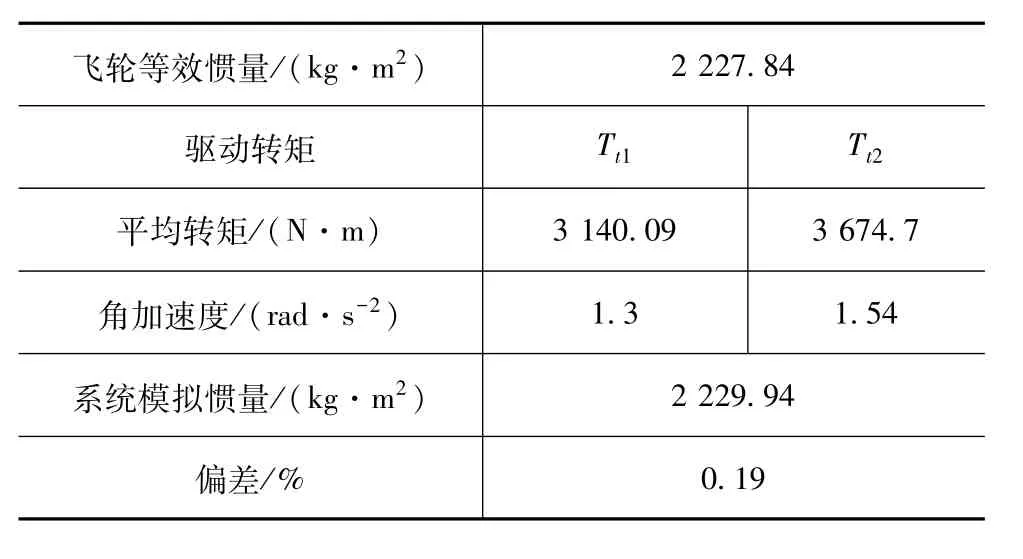
表1 等效慣量2 227.84 kg·m2校準試驗結(jié)果
觀察兩次減速過程可發(fā)現(xiàn),系統(tǒng)減速過程中速度下降曲線平穩(wěn),轉(zhuǎn)矩曲線段Td1和Td2無明顯波動。取1,2,3段區(qū)間做系統(tǒng)減速度分析,得到系統(tǒng)減速度分別為0.24,0.23和0.23 rad/s2。因此可忽略系統(tǒng)阻力矩在高轉(zhuǎn)速區(qū)間內(nèi)對試驗臺慣量標定的影響。
以相同方式對1∶2.36傳動比下750 kg·m2的標準慣量(等效慣量為4 177.2kg·m2)及1∶6.48傳動比下的250 kg·m2標準慣量(等效慣量為10 497.6 kg·m2)進行校準,得到的結(jié)果如圖10和表2所示。
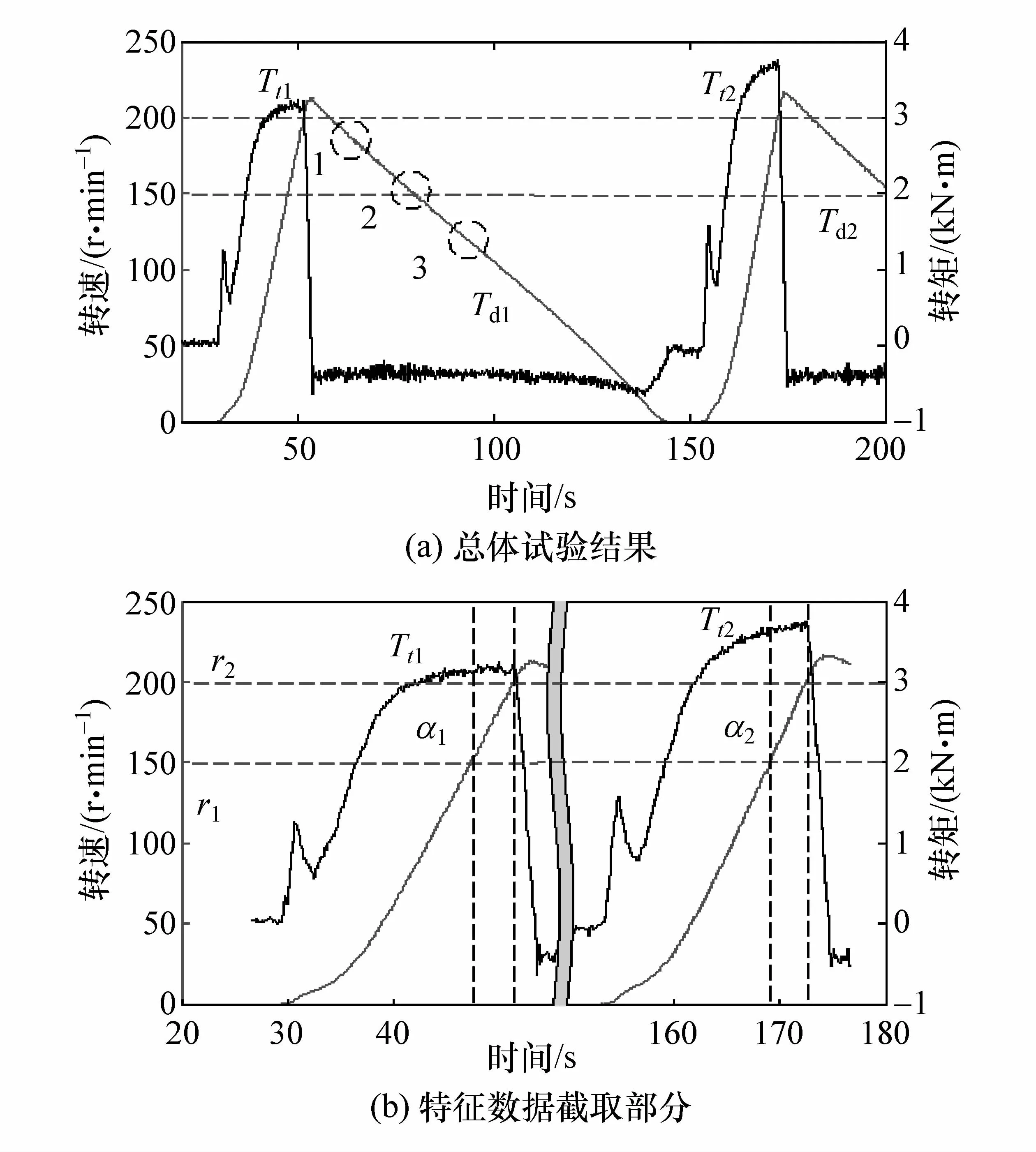
圖9 等效慣量2 227.84 kg·m2校準試驗結(jié)果
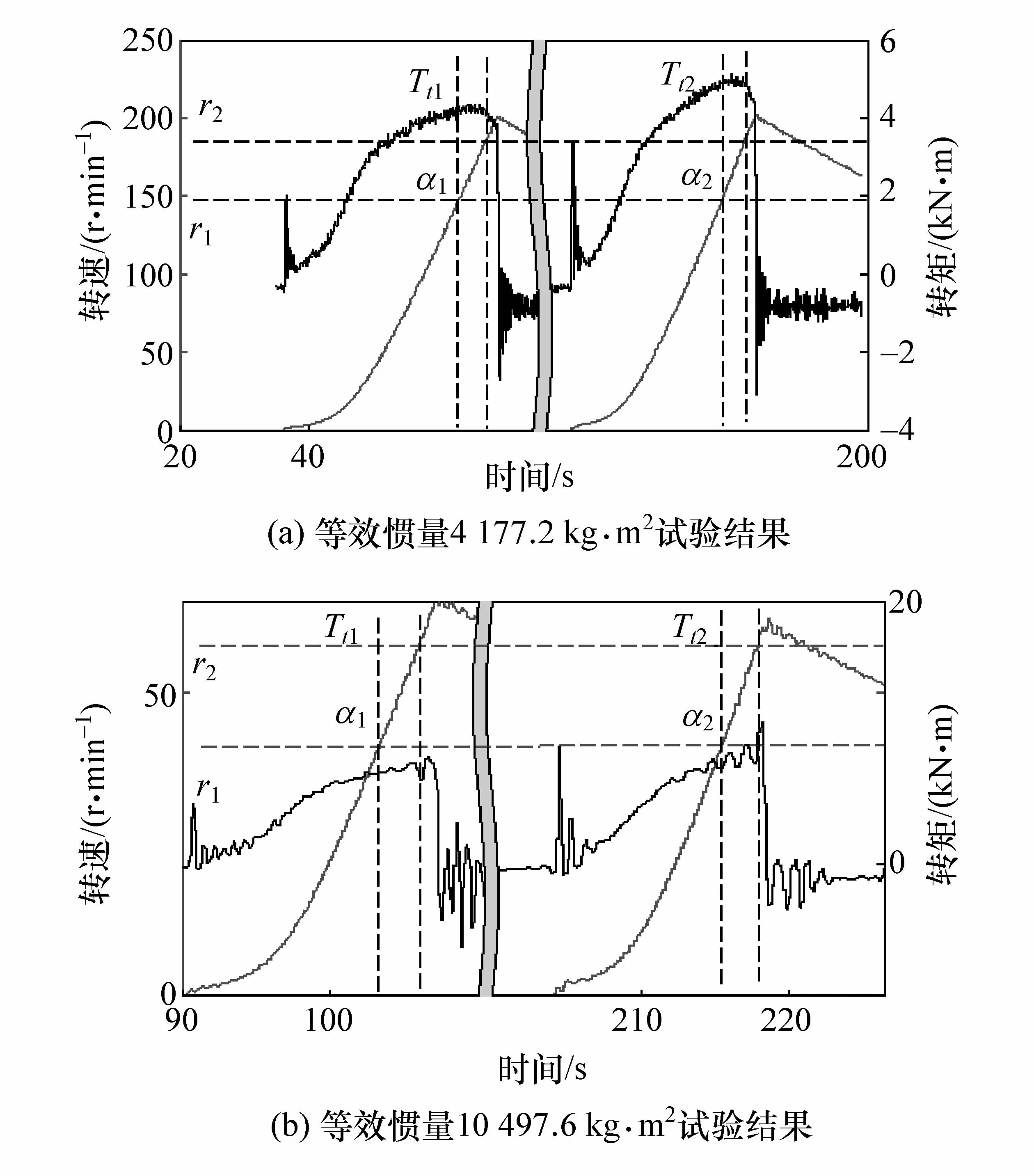
圖10 不同等效慣量條件下試驗結(jié)果
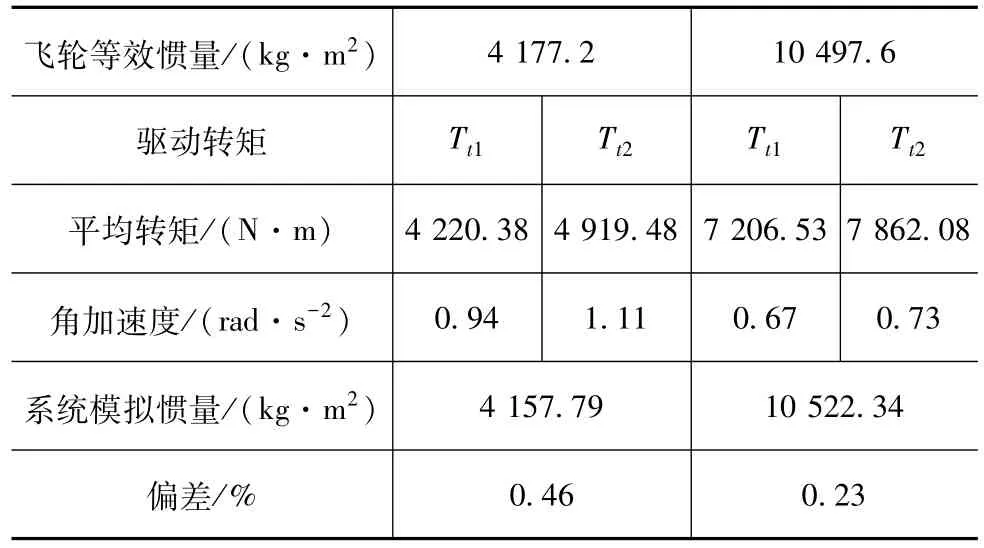
表2 等效慣量4 177.2和10 497.6 kg·m2試驗結(jié)果
系統(tǒng)標準慣量偏差隨等效慣量增加的變化關系見圖11。通過圖中曲線可以發(fā)現(xiàn),除在慣量較小情況下,由于傳感器的信噪比較低導致慣量校準偏差偏大以外,大慣量下的機械慣量均小于0.5%。
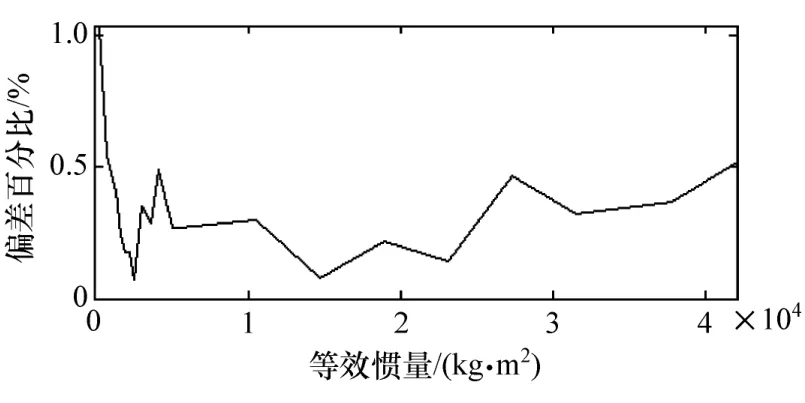
圖11 標準慣量偏差
3.2 基本慣量的標定
通過標準慣量試驗可以明確電慣量模擬試驗中每次試驗系統(tǒng)需模擬的慣量J=Js。由于慣量模擬設備自身具有慣量Jb(為方便表達,稱Jb為系統(tǒng)的基本慣量),因此須在電慣量模擬試驗前明確設備基本慣量Jb,才可明確電機需模擬慣量Jα,即

為標定系統(tǒng)基本慣量,采用如圖12所示結(jié)構(gòu)。被標定端自右向左包含測功機、減速器、轉(zhuǎn)矩儀、聯(lián)軸器。驅(qū)動端采用轉(zhuǎn)矩控制,被標定端不上電。通過與標準慣量相同原理可得到系統(tǒng)基本慣量Jb。其試驗結(jié)果如圖13所示。
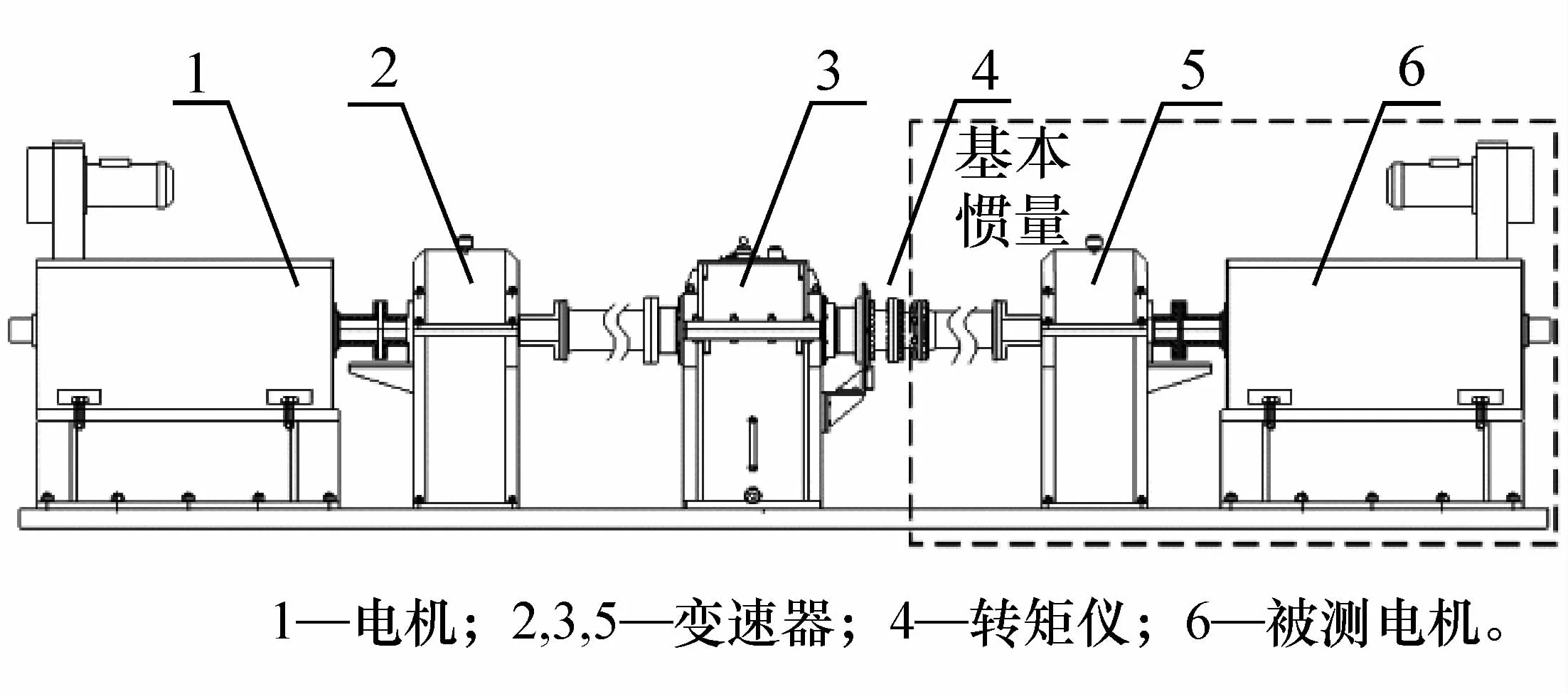
圖12 基本慣量校準試驗結(jié)構(gòu)
圖13 基本慣量校準試驗結(jié)果
當基本慣量為 512 kg·m2,同取150~200 r/min轉(zhuǎn)速區(qū)間,在平均轉(zhuǎn)矩Tt1=1500 N·m的條件下,系統(tǒng)平均角加速度為 1.79 rad/s2,Tt2=1620 N·m轉(zhuǎn)矩下,系統(tǒng)平均角加速度為2.02 rad/s2,經(jīng)標定后得到系統(tǒng)慣量為523.96 kg·m2。
3.3 電慣量的標定
在標準慣量校準試驗中,對400 kg·m2慣量飛輪組在1∶2.36傳動比下試驗得到的結(jié)果為2 232.05 kg·m2。已知傳動系統(tǒng)基本慣量值為523.96 kg·m2,則電機需模擬的慣量值為1 708.09 kg·m2。經(jīng)與標準慣量校準相同方式標定后,得到試驗結(jié)果如圖14所示。經(jīng)計算,系統(tǒng)慣量為2 211.09 kg·m2,系統(tǒng)電慣量模擬的百分偏差為0.95%。
相同方法模擬750和250 kg·m2飛輪組所對應的4 157.69和10 522.34 kg·m2等效慣量,通過圖15曲線得到兩組慣量及百分偏差分別為4 183.43 kg·m2(0.61%)和 10 603.38 kg·m2(0.76%)。
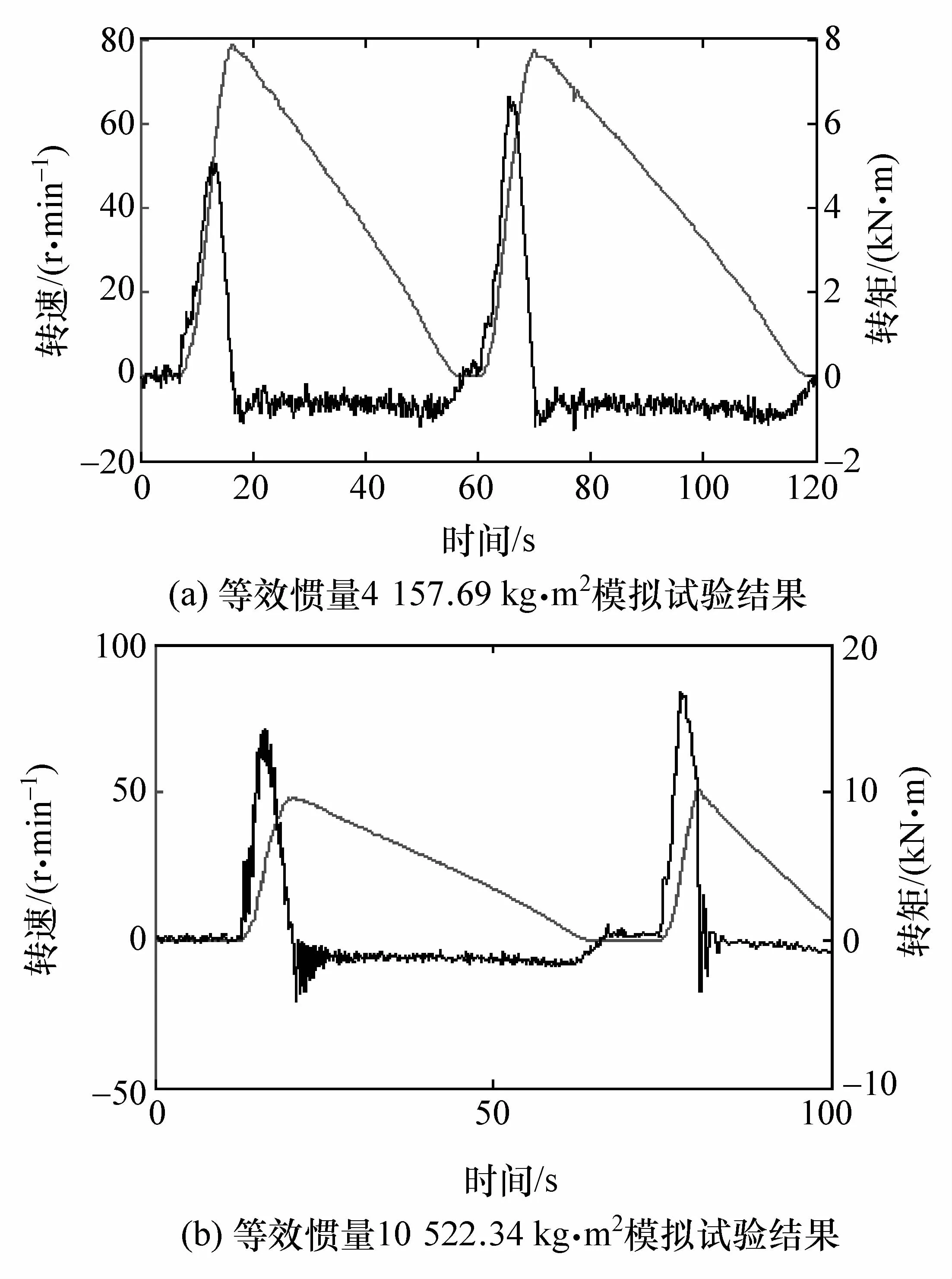
圖15 不同等效慣量模擬試驗結(jié)果
電慣量模擬偏差隨等效慣量增加的變化關系如圖16所示。通過曲線可以發(fā)現(xiàn),在慣量1 000~30 000 kg·m2區(qū)間內(nèi),慣量模擬偏差均小于1%,電慣量模擬偏差的趨勢與標準慣量偏差的趨勢相同。
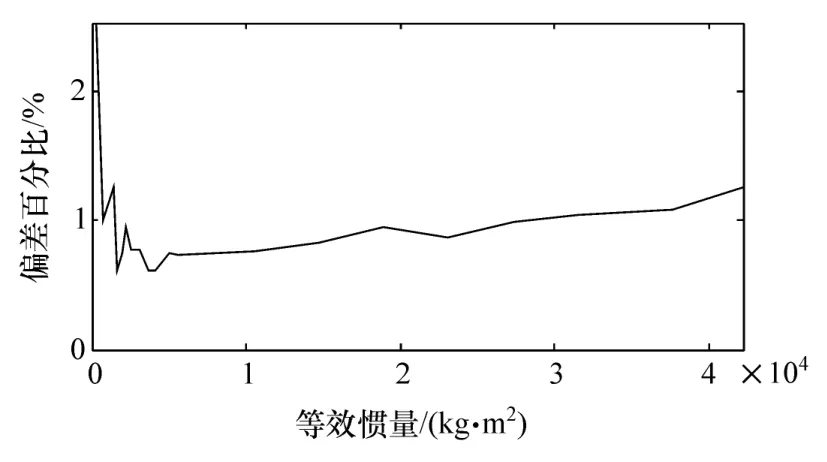
圖16 電慣量模擬偏差
3.4 電慣量響應時間標定
采用電慣量來模擬機械慣量,必然會存在延時問題,故而需要測量系統(tǒng)的響應時間。由Tt-Td=Jα可知,當系統(tǒng)的驅(qū)動轉(zhuǎn)矩Tt設定為恒定值,系統(tǒng)的阻力矩Td基本恒定時,系統(tǒng)的角加速度α為恒定值。通過測量系統(tǒng)的轉(zhuǎn)速可得到相應的角加速度曲線,當系統(tǒng)的角加速度穩(wěn)定時系統(tǒng)所模擬的電慣量也就是穩(wěn)定的,故而測量系統(tǒng)電慣量模擬的響應時間可以通過觀察角加速度(或轉(zhuǎn)矩)曲線得出。
如圖17所示,利用穩(wěn)定加速試驗對電慣量進行標定,系統(tǒng)在穩(wěn)定轉(zhuǎn)矩工況下利用電機跟隨目標轉(zhuǎn)速進行階梯性加速試驗。在圖17(a)的虛線放大區(qū)中(即圖17(b))第 20.95 s,目標轉(zhuǎn)速階躍至 10 r/min,隨后在 20.952 s系統(tǒng)加速度開始響應,在21.022 s回歸穩(wěn)定。通過評價加速度響應,認為電慣量模擬的系統(tǒng)響應時間為72 ms。
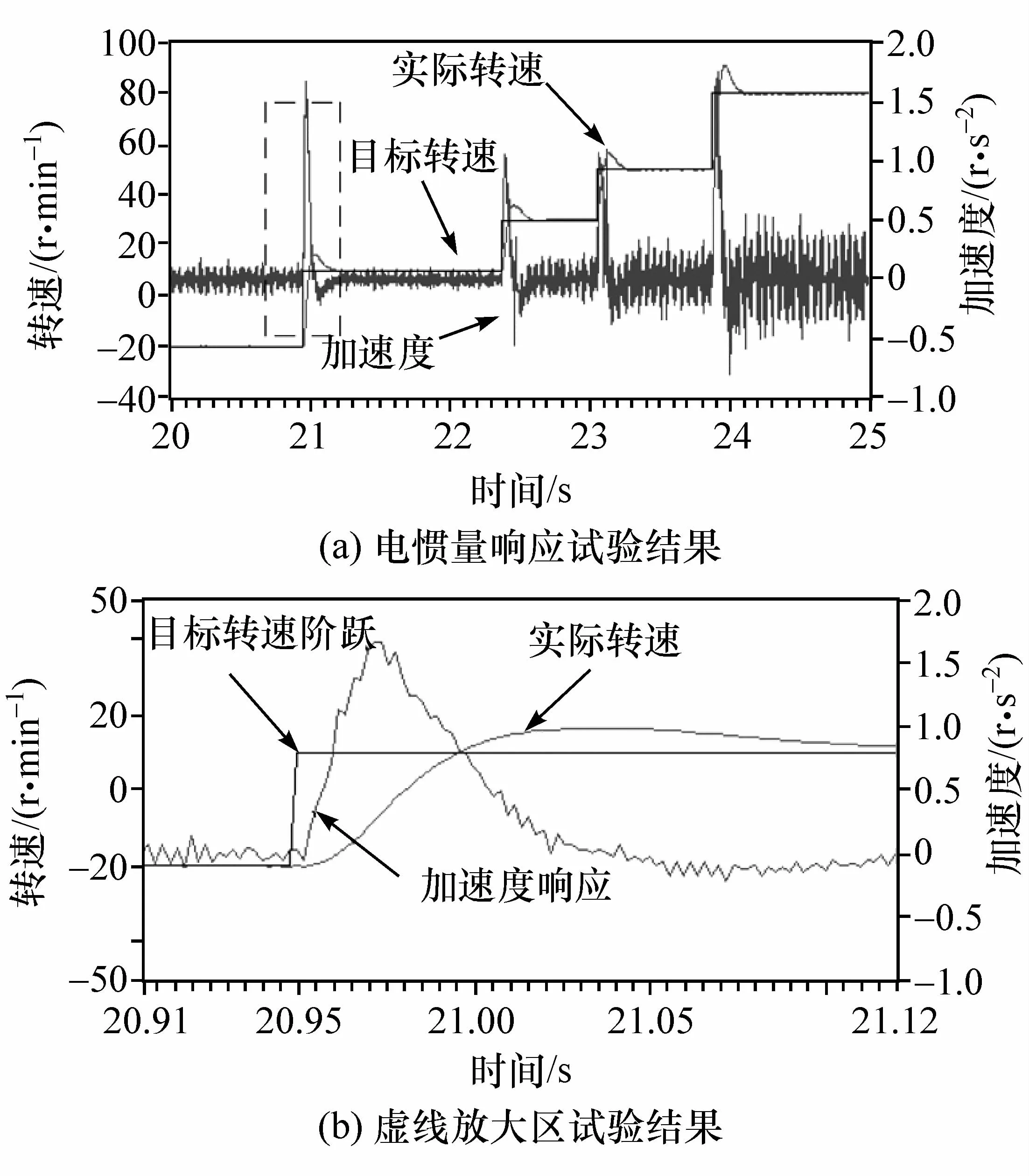
圖17 恒定轉(zhuǎn)矩下的電慣量響應時間
上述標定方式可用于標定穩(wěn)態(tài)條件下電慣量的響應時間,然而在車輛慣量模擬過程中,系統(tǒng)轉(zhuǎn)速和轉(zhuǎn)矩往往是非恒定的,因此上述標定結(jié)果不能表達實車模擬環(huán)境下的電慣量響應速率。
由圖5可知,在實車模擬過程中,系統(tǒng)通過實際系統(tǒng)模型 Gem(s)推導系統(tǒng)目標轉(zhuǎn)速 ωem(s),然后再利用速度閉環(huán)計算出所需的電機轉(zhuǎn)矩Tl(s)。根據(jù)Tt-Td=Jα,通過標準慣量試驗可知一段連續(xù)的轉(zhuǎn)速區(qū)間內(nèi)Td變化幾乎可以忽略,當負載轉(zhuǎn)矩輸出精確時,比較目標加速度αt和實測加速度αr可評價系統(tǒng)響應時間。設在一條連續(xù)轉(zhuǎn)矩波動曲線的t0時刻,系統(tǒng)目標加速度 αt,假設經(jīng)過時間 t后1%,則認為t為該段信號的響應時間。在實際操作過程中,由于系統(tǒng)采樣速率遠高于系統(tǒng)響應時間,因此單次響應時間采用如下邏輯判斷方法,其中Δt為系統(tǒng)采樣頻率。經(jīng)過m次計數(shù)后,系統(tǒng)平均響應時間為
根據(jù)上述算法在一段負載連續(xù)變化的預設路譜試驗中測量系統(tǒng)響應時間,得到如圖18所示測試結(jié)果。圖中系統(tǒng)平均響應時間為25.40 ms。系統(tǒng)轉(zhuǎn)矩最慢響應發(fā)生在幾個轉(zhuǎn)矩波動較大時期,此時系統(tǒng)轉(zhuǎn)速反復波動,由于系統(tǒng)滯后原因系統(tǒng)難以及時響應,最大響應時間為68 ms。
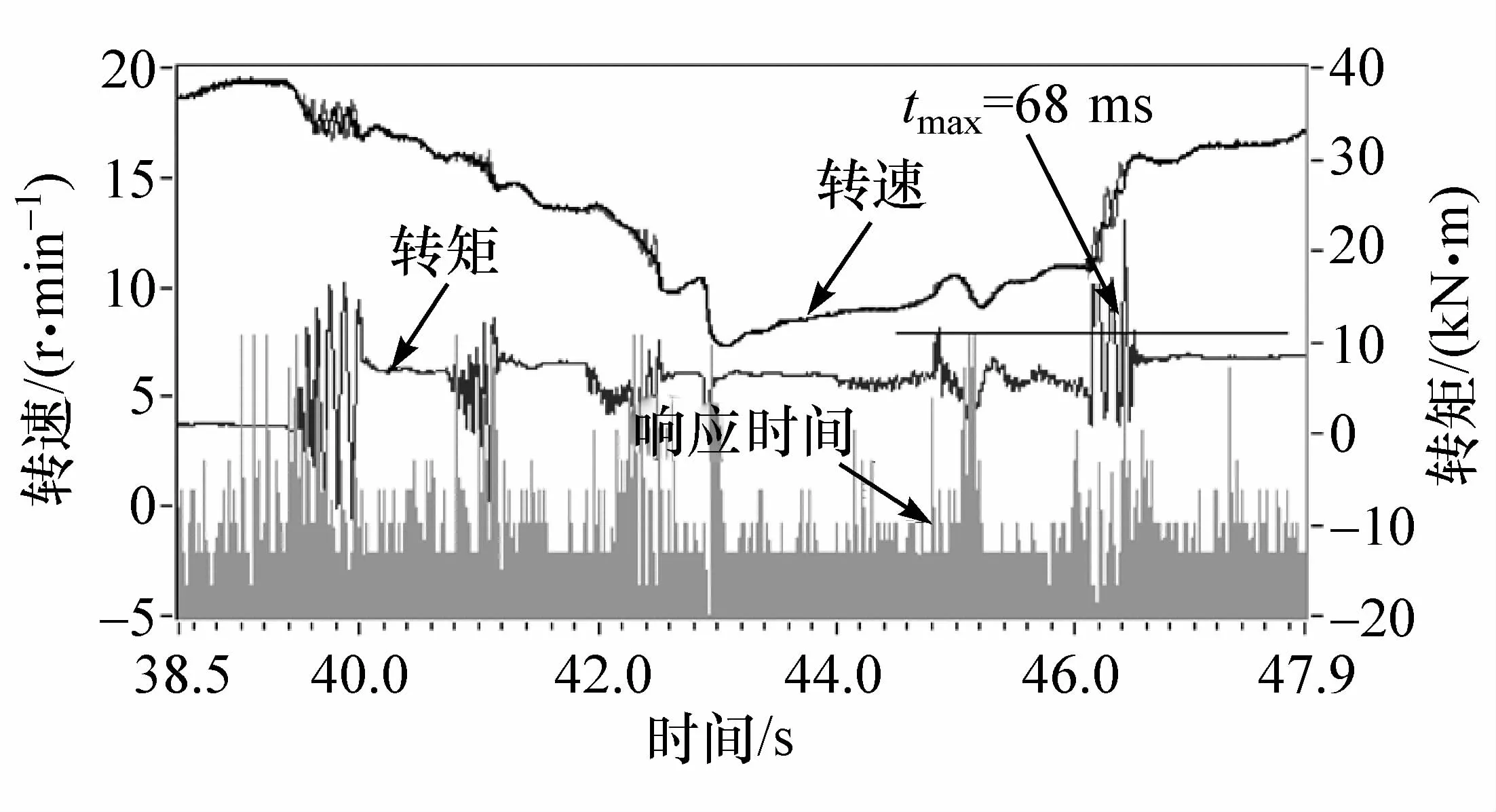
圖18 預設路譜下的系統(tǒng)響應時間
4 整車試驗
利用已標定的試驗臺架對履帶車輛整車進行負載性能試驗,負載試驗即模擬某特定車輛在特定路面阻力系數(shù)下的轉(zhuǎn)矩輸出,通過負載試驗可驗證車輛慣量建模的準確性。對某整車質(zhì)量為30 t的履帶車輛進行路面阻力系數(shù)為0.05條件下的負載試驗,根據(jù)式(20)得到當量慣量為 J=2723.6 kg·m2,根據(jù)圖16數(shù)據(jù)校正后的系統(tǒng)輸入慣量應為2 703.05 kg·m2。分別以校正前后的慣量作為輸入對系統(tǒng)進行模擬,得到如圖19所示試驗曲線,結(jié)果如表3所示。
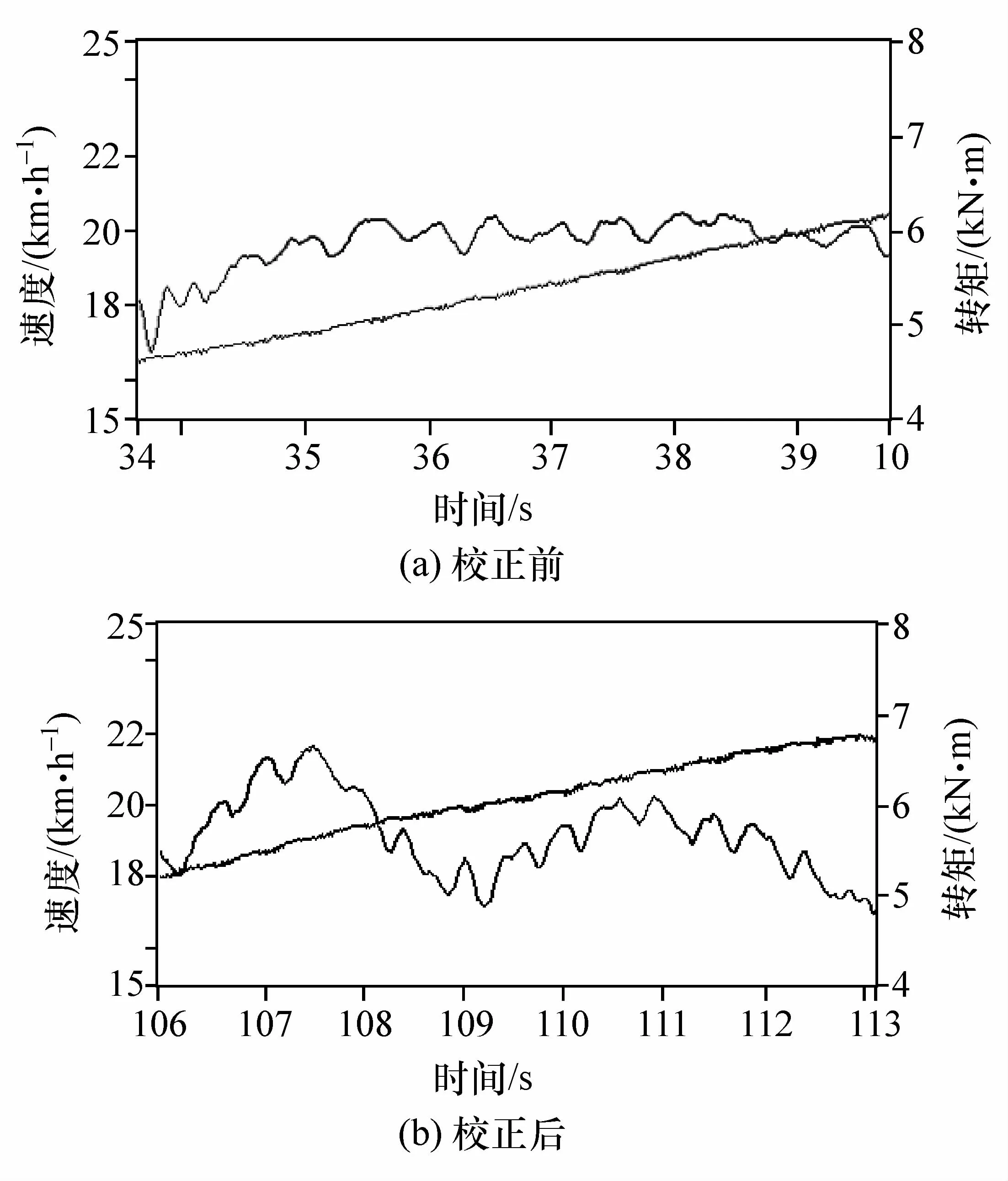
圖19 負載模擬試驗
結(jié)果表明,在同一模擬對象下,經(jīng)過校正的輸入慣量使系統(tǒng)的模擬偏差從0.96%降低至0.27%,有效提高了電慣量模擬的精度。
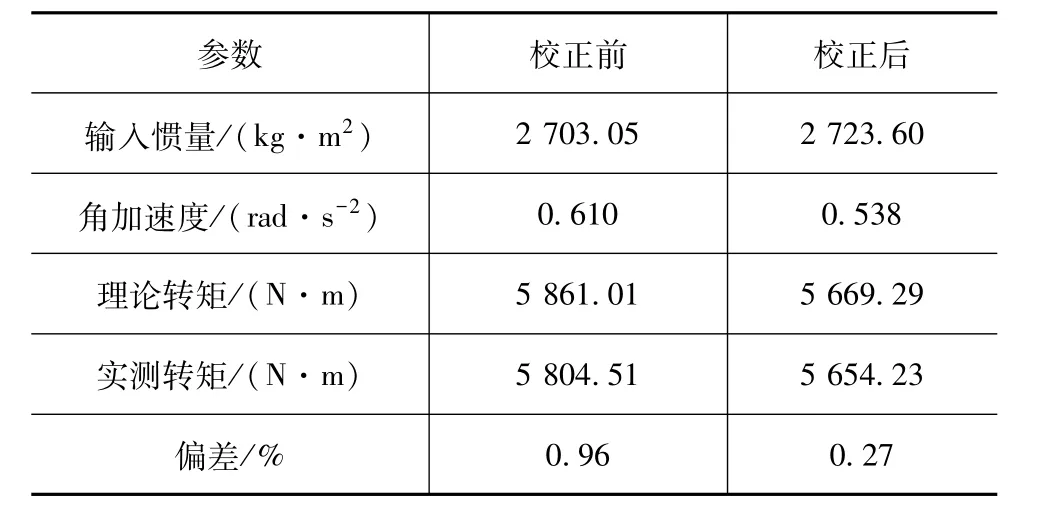
表3 校正前后結(jié)果對比
5 結(jié)論
本文中根據(jù)履帶車輛的試驗需求,對履帶車輛進行了建模,設計根據(jù)速度跟蹤法控制電機負載的控制程序,為討論該控制程序下慣量模擬的準確性,創(chuàng)新性地提出了慣量模擬的標定方法,得到結(jié)論如下。
(1)利用速度跟蹤法設計的履帶車輛慣量模擬控制程序,準確性好,響應速度快。
(2)利用標準慣量比對的電慣量模擬的標定方法,具有良好的可行性,對機械慣量點模擬的準確性有定量的分析,對評價控制系統(tǒng)及機械系統(tǒng)有較高的參考價值。
(3)本文中采用的標定方法同樣適用于其它種類車輛臺架試驗,具有廣泛的工程實用價值。
試驗證明,經(jīng)標定后的履帶車輛慣量模擬系統(tǒng)的慣量模擬精度準確可靠,為履帶車輛的設計、研發(fā)提供了可靠的試驗依據(jù)。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
家庭影院技術(2017年9期)2017-09-26 03:41:45
