基于協同攻擊區的航空集群最優空間構型研究
2019-05-08 06:17:32史振慶梁曉龍張佳強劉流范翔宇
兵工學報 2019年4期
史振慶, 梁曉龍, 張佳強, 劉流, 范翔宇
(空軍工程大學 國家空管防相撞技術重點實驗室, 陜西 西安 710051)
0 引言
航空集群是由一定數量的單功能和多功能有人或無人航空飛行器共同組成,以交感網絡為基礎,整體具有能力涌現特點的空中移動系統[1]。隨著信息化作戰水平的不斷提高和“云技術”等關鍵技術的發展,以航空集群為核心的空中作戰體系將不斷發展和完善[1-2]。通過有人機/無人機數量的調整、構型的優化,可以獲得針對不同作戰任務、不同作戰規模的航空集群空空導彈最佳協同攻擊區,達到提升集群作戰能力和抗毀傷能力的目的。
航空集群需要執行偵查、干擾、攻擊等多種任務,面對不同的任務,由于集群功能的需要,其空間構型也不同[1]。在航空集群協同反隱身構型、協同探測構型、集群構型控制等方面已有較為深入的研究[3-5],在空空導彈協同攻擊區方面,對航空集群攻擊構型研究較少,其研究的難點為空間構型尋優指標的明確、優化函數的數學化表達、空間構型尋優方法的選擇等。在單機空空導彈攻擊區的研究中,學者們作了大量的工作,取得了豐碩的成果。文獻[6-7]采用多項式擬合和變步長積分法,獲得了攻擊區的快速求解方法。文獻[8-9]將神經網絡應用到攻擊區的求解中,通過離線訓練,在線使用,極大地提高了攻擊區的實時解算速度。然而此類方案對于數據的依賴度較強,訓練數據量的大小和準確性直接決定著訓練網絡的性能。文獻[10-12]對攻擊區進行了建模與仿真,獲得了較好的攻擊區求解方法,對后續研究具有良好的借鑒作用。在協同攻擊區的研究中,艦空導彈在此領域已取得了一定的研究成果[13-14]。空空導彈在協同制導律方面的研究成果豐碩[15-18],然而關于協同攻擊區的研究相對較少,僅有文獻[10]對雙機編隊協同攻擊區進行了相關研究,分析了影響協同攻擊區的因素。
針對當前熱點研究的航空集群智能/自主空戰對集群體系殺傷能力度量的迫切需求,本文首先建立了有人/無人集群協同攻擊區數學模型,得到了一般構型下的協同攻擊區解算方法。由于協同攻擊區影響因素較多,為得到使協同攻擊區域最大、我方損失最小的航空集群空間構型,本文采用智能優化算法對空間構型進行尋優。利用Tent混沌序列[19-21],將自適應Tent混沌搜索(SATC)方法用于灰狼優化(GWO)算法[22],提出了STAC-GWO算法。最后,以所求協同攻擊區的大小作為目標函數,利用改進后的算法對航空集群空間構型進行尋優,并通過仿真進行了算法有效性驗證。
1 航空集群空間協同攻擊區概念
傳統的單平臺空空導彈攻擊區是指,以發射導彈的攻擊機為中心,攻擊機發射導彈能夠以一定概率命中目標的目標起始點范圍所組成的區域[10]。
航空集群協同攻擊區指,航空集群內的有人/無人機,為提高導彈命中概率、增大攻擊區域或達成某種戰術目的,通過協同,發射空空導彈能夠命中目標的目標起始點所組成的區域。
1.1 多機協同攻擊方式
單機發射、單機制導的導彈攻擊模式,作戰能力較為低下,不適應于航空集群背景下的作戰模式。隨著彈載數據鏈的發展,載機與載機、載機與導彈,甚至導彈與導彈之間可以通過數據鏈實現高速通信,共享戰場態勢信息,從而為協同攻擊提供條件。協同攻擊的方式主要有:
1)本機發射、友機傳遞制導。受導彈天線接收角度的限制,在導彈發射后的飛行過程中本機可能無法對導彈進行制導。友機可以通過空間位置的調整,對導彈進行指令傳輸,而控制權仍在本機。
2)本機發射、友機制導。本機發射導彈后,在面臨威脅或者需執行其他任務時,需進行機動,從而無法對導彈進行指令傳輸。友機可以接替載機對導彈進行中制導。
3)戰術協同。為達成某種戰術目的,如增大攻擊區域、提高導彈的命中概率、減少我機傷亡等,載機會基于某種戰術指標進行空間位置的組合,從而形成協同。
在協同條件下,單機作戰能力得以提高,攻擊范圍得到拓展,能夠完成之前所不能完成的任務。本文主要研究第1種協同攻擊方式,通過飛機間空間協同位置的改變,有制導能力的飛機為無制導能力的飛機或者在空間中某處無制導能力的飛機提供初始制導條件,從而增大協同攻擊區域。
1.2 航空集群空間構型設計基本原則
未來很長一段時間內,無人機智能水平遠不及人的智能,航空集群中的無人機更多地將擔負“忠誠僚機”的角色。針對不同的作戰任務,航空集群構型設計應當滿足以下基本原則:
1)相對于有人機,無人機的毀傷代價較小,故集群中應將至少一架無人機部署在構型的前方;
2)有人機相對于無人機,具有指揮控制能力,發揮著集群“大腦”的作用,因而集群中至少應部署一架有人機作為集群的指揮控制核心;
3)在飛機架數相同、攻擊區域大小相等的情況下,為降低有人機的損失,認為最優空間構型中包含的無人機數量應為最多。
2 空間協同攻擊區數學模型
2.1 空空導彈運動模型
在慣性坐標系下,導彈運動學模型為
(1)
式中:下標i表示第i架載機所發射的導彈;xmi、ymi、zmi分別為導彈在慣性坐標系下x軸、y軸、z軸3個方向上的坐標;vmi、θmi、φmi分別為導彈的速度、彈道傾角和彈道偏角。
在彈道坐標系下,導彈三自由度動力學方程模型為
(2)
式中:mmi為導彈質量;Pix、Piy、Piz分別為推力Pi在彈道坐標系各軸上的分量;Fix、Fiy、Fiz分別為導彈所受除推力外的所有外力分別在彈道坐標系各軸上分量的代數和。由于導彈主要受推力、空氣阻力和重力的作用,(2)式可表示為
(3)
式中:Bi為導彈所受空氣阻力;nmiy、nmiz分別為導彈在俯仰、偏航方向的轉彎控制過載。mmi、Pi和Bi的變化規律分別為
(4)
(5)
(6)

2.2 導彈導引律模型

(7)
式中:K為比例導引系數。將(7)式所得的導彈控制加速度用于(3)式,得
(8)
3 協同攻擊區解算方法
3.1 協同攻擊區約束條件
影響協同攻擊區的約束條件主要來自導彈約束條件和攻擊機約束條件。
3.1.1 導彈約束條件
導彈攻擊目標的過程中,導彈所受約束條件主要有:
1)飛行時間限制。當導彈飛行時間超過導彈可控飛行時間tmax時,導彈失控。故導彈飛行時間應滿足:
t≤tmax.
(9)
2)飛行高度限制。導彈飛行高度h一般應滿足約束條件:
200 m≤h≤20 000 m.
(10)
3)最小飛行速度限制。當導彈飛行速度小于一定值時,無法提供升力,故導彈飛行速度應滿足:
|vm|≥vmin.
(11)
4)動態視場角限制。導彈縱軸與視線的夾角為導引頭視場角φ,當視場角超過最大視場角φmax時,導彈易丟失目標,故應有
|φ|≤φmax.
(12)
5)引信解鎖時間限制。當彈目距離Rmt小于一定的距離Rap時,導彈剩余飛行時間tl應大于引信解鎖時間tu,即
(13)
3.1.2 攻擊機約束條件
1)本機發射、他機制導的協同模式下,攻擊機發射導彈時,兩機距離Rff應小于最大通信距離Rcmax,即
Rff≤Rcmax.
(14)
2)負責制導的飛機與導彈之間的距離Rfm不能大于最大數據傳輸距離Rtmax,即
Rfm≤Rtmax.
(15)
3)為保證導彈能接收到制導機的指令,制導機應處于導彈天線接收角度范圍之內。
3.2 協同攻擊區邊界搜索方法
為得到協同攻擊區的邊界,需要對載機發射導彈能夠命中目標的目標初始位置點進行搜索。為快速有效地求得協同攻擊區的邊界,本文采用黃金分割搜索方法,對已確定方位角和俯仰角的目標位置進行一維搜索。以搜索協同攻擊區遠界為例,具體搜索步驟如下:
1) 確定參與協同的載機數量m,初始化載機、導彈和目標的參數,令j=1.
2) 以第j架載機的導彈為中心建立彈道坐標系,開始確定第j架載機的攻擊區遠界,初始化最大搜索范圍[Rn,Rf],Rn為最大搜索范圍近界,Rf為最大搜索范圍遠界。
3) 確定目標相對于導彈的方位角和俯仰角,利用黃金分割搜索方法,更新黃金分割搜索點Rg,Rg的值為Rg=Rn+0.618(Rf-Rn),判斷是否滿足發射條件。若滿足,則轉向步驟4,否則繼續利用黃金分割搜索法更新黃金分割搜索點,直到該點滿足發射條件。
4) 對導彈和目標進行運動仿真,根據3.1節中的約束條件,以導彈與目標是否小于規定距離來判斷導彈是否命中目標且|Rf-Rn|<φ,φ為最大誤差值。若滿足,記錄該方位角、俯仰角下的攻擊區遠界,否則,更新黃金分割搜索點,轉向步驟3.
5) 根據角度搜索范圍判斷角度搜索是否完畢,若完畢,則轉向步驟6,否則更新目標方位角、俯仰角,轉向步驟3.
6) 令j=j+1,判斷j≤m是否成立,若成立,則轉向步驟2,否則協同攻擊區遠邊界搜索結束。
圖1為協同攻擊區遠界搜索流程圖。

圖1 協同攻擊區邊界搜索流程Fig.1 Searching process of boundary of cooperative attack zone
3.3 協同攻擊區體積求解方法
攻擊區的遠邊界和近邊界分別是由3.2節所求遠邊界點和近邊界點所連成的面,側邊界是由相同方位角和俯仰角的遠邊界和近邊界邊緣點的連線所構成的面,攻擊區域是由以上邊界包圍所形成的封閉區域,攻擊區域大小就是該區域的體積大小。
由于該區域不能用明確的解析式來表達,無法用積分的方式對其進行求解,且該區域呈不規則狀,因此可以用蒙特卡洛方法求解協同攻擊區體積,具體過程為:
1)求得攻擊區的邊界,并將攻擊區置于一個可以將其包圍住的體積可求的規則幾何體中,記該規則幾何體體積為Vr;
2)在該幾何體中產生足夠多的P個隨機點,記錄在協同攻擊區邊界內點的總個數p;
3)攻擊區體積V可表示為
(16)
4 基于SATC-GWO的航空集群空間構型尋優方法
在第2節和第3節中,本文提出了協同攻擊區的求解方法,得到了一般空間構型下的多機協同攻擊區。在對使協同攻擊區最大的航空集群空間構型進行尋優時,涉及到集群中飛機之間的方位、距離等諸多因素,尋優復雜度高。現有集群空間構型優化方法有遍歷法和群體智能優化方法等,文獻[4]在對航空集群協同探測構型的優化中將二者作了比較,結果表明群體智能優化方法的尋優速度和效率要遠大于遍歷法,因此本文選擇使用群體智能優化算法對航空集群空間構型進行尋優。
GWO算法在尋優問題中得到了廣泛應用,獲得了較好的效果,可以將其應用集群空間構型尋優中。然而GWO算法在接近全局最優時,搜索速度會變慢,種群多樣性會降低,甚至會陷入局部最優。Tent混沌序列具有遍歷性、隨機性、均勻性等特點,可將其運用到GWO算法中以提高種群的多樣性,從而提高算法的速度和精度。
4.1 GWO算法
GWO算法是由Mirialili等于2014年提出的,通過模擬灰狼群的社會等級制度和捕食策略,不斷尋找最優值。GWO算法具有全局搜索能力強、參數設置少、原理簡單等特點。
灰狼群體內具有嚴格的等級制度,其等級金字塔如圖2所示。金字塔第1層的狼稱首領狼,表示為α,負責領導狼群,組織狼群的捕獵等行為;第2層的狼稱下屬狼,表示為β,協助首領狼做出決策;第3層的狼由偵察兵、哨兵、獵手等組成,表示為δ,負責偵察、放哨、捕獵等事務;第4層的狼稱為ω,它們服從于其他3個高等級的狼,在群體中的主要作用是平衡內部關系。
圖2 灰狼社會等級示意圖Fig.2 Hierarchy of grey wolves
狼群捕食獵物的過程為:首先,狼群對獵物進行追蹤,并逐漸接近獵物;然后,狼群對已接近的獵物形成包圍;最后,包圍圈逐漸縮小,狼群對獵物發起攻擊。下面對灰狼逐漸接近并包圍獵物的行為進行描述。

F(x1,y1,z1,…,xq,yq,zq)=1/Vs,
(17)
該優化問題可以表示為
(18)
式中:φU、θU、dU分別為無人機相對某一制導有人機的方位角、俯仰角和距離;[φmin,φmax]、[θmin,θmax]和[dmin,dmax]分別為有人機雷達在方位角、俯仰角和距離上的探測范圍。該約束條件主要考慮無人機僅有載彈能力而不具備制導能力,因此在對飛機進行部署時,需要將無人機放置在有人機的制導范圍內。
當函數F(x1,y1,z1,…,xq,yq,zq)最小時,協同攻擊區域Vs最大。
灰狼群體包圍獵物的公式可表示為
(19)
式中:Xp(ε)為第ε代獵物的位置,最大迭代次數為εmax;X(ε)為第ε代灰狼個體的位置;r1、r2分別為D維隨機向量,每個維度上的值都是[0,1]之間的隨機數;a為D維隨機向量,維度d上的值ad為隨迭代次數從2到0線性遞減的數,即
ad=2-ε/εmax.
(20)
灰狼在捕食過程中,一般的個體ω會根據歷史前3個最靠近獵物位置的灰狼α、β、δ的位置來判斷獵物的方位,更新自己的位置。第k只灰狼位置更新的數學描述為
(21)
每代更新結束后,計算每個個體的適應度值,重新記錄3個歷史最優灰狼α、β、δ,下一代會根據α、β、δ繼續進行迭代,直到設定的迭代次數結束。從最后一代的結果中,選擇出適應度值最高的灰狼位置,作為最優解。
4.2 Tent混沌序列
Tent混沌序列的映射可表示為
(22)
經過伯努力位移變換后為
xt+1=(2xt)modl.
(23)
產生Tent混沌序列的具體方法為:
1)在(0,1)之間產生隨機初始值x0(x0不能為小周期(0.2,0.4,0.6,0.8)中的數),并記錄z1=x0,ξ=λ=1;
2)根據(23)式進行迭代,產生xλ+1,且λ=λ+1;
3)如果xλ={0,0.25,0.50,0.75},或者xλ=x(λ-w),w={0,1,2,3,4},令xλ=zξ+1,其中zξ+1=zξ+γ,γ為隨機數,然后令ξ=ξ+1,否則繼續步驟2;
4)如果達到最大迭代次數,則循環結束,輸出x序列,否則繼續步驟2.
4.3 自適應Tent混沌搜索方法
當GWO算法陷入局部最優時,利用Tent混沌序列遍歷性、隨機性、均勻性等特性,在迭代中以GWO算法所產生的局部最優點為基礎,產生新的Tent混沌序列,從而擴大搜索空間,幫助GWO跳出局部最優。

1)將Xb做歸一化處理得Zb,其中:
(24)
3)利用(25)式將Zb還原到原解空間鄰域中,產生新解Wb(μ),
(25)
4)將新解Wb(μ)代入(17)式求適應度值,并與原來的最佳適應度值做比較,保留當前最優解;
5)判斷是否達到最大混沌迭代次數Tmax,若達到則終止搜索,否則轉向步驟2.
4.4 SATC-GWO算法在航空集群最優構型求解中的應用
SATC-GWO算法求解航空集群最優空間構型整體思路為:為提高種群多樣性與遍歷性,首先利用Tent混沌序列產生初始種群,每個個體代表一種航空集群空間構型,利用協同攻擊區求解方法求得此構型下的攻擊區,并以攻擊區域大小的倒數為適應度函數,計算每個個體的適應度值;然后利用GWO進行迭代,對每個個體的位置進行更新,并不斷選擇更優的個體;當GWO陷入局部最優時,利用自適應Tent混沌搜索方法產生新解,幫助GWO跳出局部最優;最后在滿足迭代次數或者尋優精度時,算法停止,得到最優解,得出集群最優空間構型。該方法的難點為尋優中涉及的要素和維度較多,解決尋優問題的關鍵是提高尋優的精度和速度,這也是該尋優方案的兩個重要評價指標。
SATC-GWO算法充分利用了Tent混沌序列在GWO產生初始種群和搜索產生新解方面的優勢,能夠提高航空集群空間構型尋優的速度和精度。
SATC-GWO算法在求解航空集群最優空間構型中的具體步驟為:
1)確定集群中飛機的總數量U;根據1.2節中的航空集群空間構型設計原則,可以確定集群中無人機數量u為1≤u≤U-1;設無人機初始數量u=1;初始化F(X(0))=∞;設置灰狼初始種群規模為N,最大迭代次數為εmax,搜索空間維度為D,即多機構型中飛機之間的方位、距離等;初始化r1、r2、a;確定被限定的最優解停留次數ηmax和混沌最大迭代次數Tmax.
2)令GWO初始迭代次數ε=1,利用Tent混沌序列,在搜索區域內對狼群進行初始化,生成N個D維向量Xi(1),i=1,2,…,N,其具體步驟為:
(26)
式中:n=1,2,…,N;d=1,2,…,D.

4)更新迭代次數ε=ε+1,并更新r1、r2、a,根據步驟3中所得Xα、Xβ、Xδ和(21)式對第M+1代的灰狼位置進行更新;重新計算新解對應的協同攻擊區,從而計算新解的適應度值F(Xn(M+1))。
5)更新歷史最優解Xα、Xβ、Xδ,若歷史最優解Xα沒變,則η=η+1;否則,若歷史最優解Xα變化,則η=0.
6)如果η達到最大限度,即η=ηmax,也就是算法陷入局部最優時,根據4.3節中自適應Tent混沌搜索方法產生新的最優解代替當前歷史最優解。
7)判斷是否達到最大迭代次數εmax. 若未達到,則返回步驟4,否則記錄歷史最優解Xα為Xα(u),若F(Xα(u))≤F(Xα(u-1)),則令Xα(u)=Xα(u),否則,令Xα(u)=Xα(u-1)。
8)令u=u+1,若u≤U-1,則返回步驟2,否則,輸出最優解Xα(u)。
SATC-GWO算法在求解航空集群最優空間構型中的流程圖如圖3所示。

圖3 基于SATC-GWO的航空集群空間構型尋優流程Fig.3 Optimization process of aircraft swarms patial configuration based on SATC-GWO
5 仿真分析
為驗證本文所提方法的效能,現對多機空間構型尋優進行實驗仿真。
假設目標運動速度為300 m/s,航向為180°,且航向和飛行高度不變;載機飛行速度400 m/s,飛行高度10 km,初始航向為0°;機載雷達的有效截獲角度范圍為±45°,最遠截獲距離為150 km,有人機上裝機載雷達,無人機不裝備機載雷達,只有搭載和發射導彈的能力,導彈通過有人機的制導命中目標。導彈初始速度為400 m/s,發動機工作時間為10 s,可控飛行時間為70 s.
實驗環境:本文仿真基于MATLAB R2014a平臺,物理平臺為Lenovo公司產臺式機,CPU主頻2.6 GHz,4 GB內存,Windows 7系統。
5.1 雙機空間構型尋優
由航空集群構型設計原則可知,雙機構型由一架有人機和一架無人機組成。設有人機為長機,無人機為僚機。設灰狼初始種群規模為N=50,最大迭代次數為Mmax=150,搜索空間維度為D=2,即僚機位于長機的方位和距離,最優解停留最大次數ηmax=5,混沌最大迭代次數Tmax=30,以協同攻擊區域大小的倒數作為適應度值函數。在優化參數的選取上,文章借鑒文獻[19]在用Tent混沌序列對蜂群和粒子群算法的改進中選取的參數量級,并經過了多次仿真實驗,選擇在尋優速度和精度上均取得較好效果的參數。
將蜂群(ABC)算法、粒子群(PSO)算法、GWO算法和SATC-GWO算法分別對雙機最優空間構型進行50次尋優仿真,前3種算法的初始種群規模和最大迭代次數與SATC-GWO算法中的相同。4種優化算法的平均進化曲線如圖4所示,所得最優空間構型下的平均攻擊區域大小和算法平均所需時間結果如表1所示。
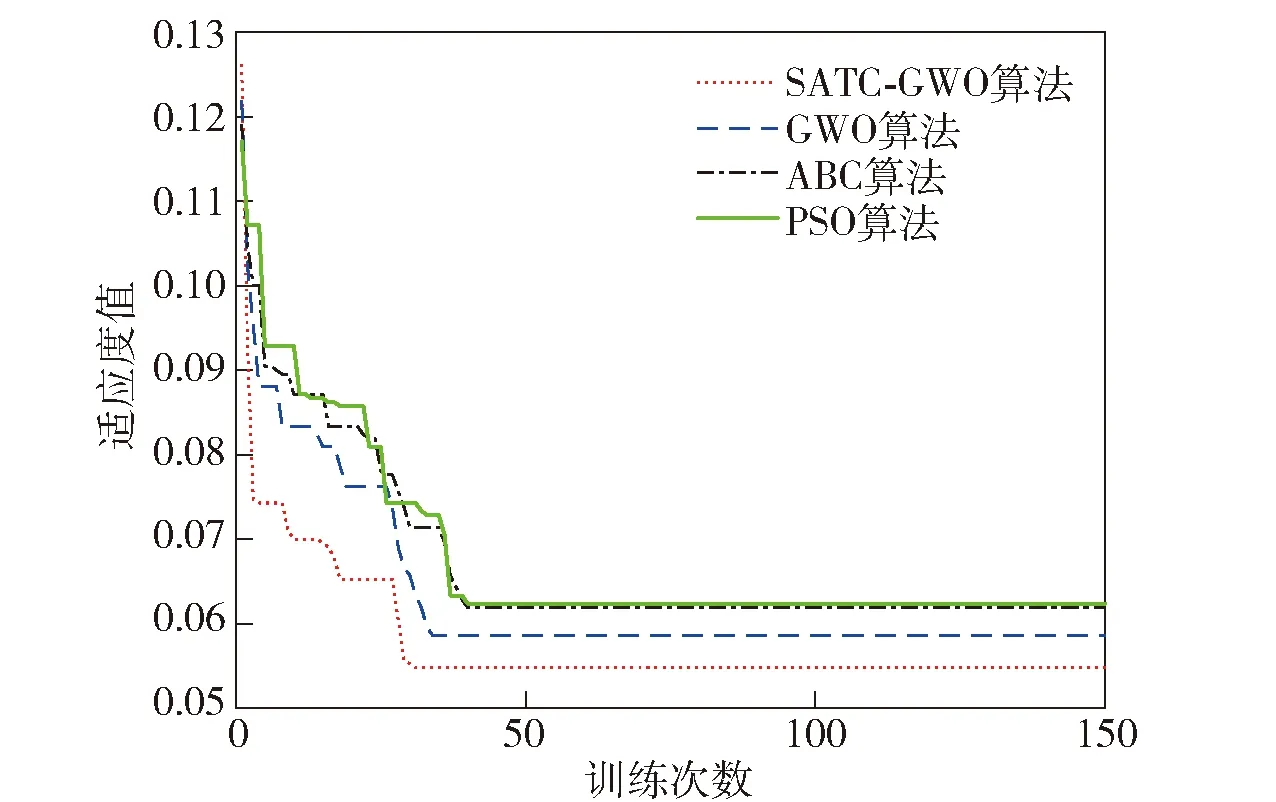
圖4 雙機協同攻擊區尋優過程Fig.4 Optimal curves of cooperative attack zone of two aircrafts
圖4和表1表明,SATC-GWO算法經過迭代30次后,基本可以得到最優解,且所用迭代次數是最少的。在以上仿真條件和適應度值函數確定的情況下,在收斂速度和尋優精度上,SATC-GWO算法所需收斂時間是最短的,且所得結果的攻擊區域最大。GWO算法雖然優于ABC算法和PSO算法,但與SATC-GWO算法相比,GWO算法收斂速度仍然較慢,且在50次試驗中,共出現4次陷入局部最優,即適應度值收斂于較大值的情況,從而影響了GWO算法的性能,而在50次實驗中SATC-GWO算法均未出現陷入局部最優的情況。為進一步驗證SATC-GWO算法在集群空間構型尋優中的可行性,又利用SATC-GWO算法在以上仿真條件下進行了100次仿真實驗,尋優結果均在19.3×104km3左右。
表1 雙機協同攻擊區優化結果比較Tab.1 Optimized results of cooperative attack zone of two aircrafts
以上結果表明,在集群空間構型尋優問題中,SATC-GWO算法在收斂速度和尋優精度上,較GWO算法和大部分智能算法均有明顯提升,降低了傳統的GWO算法易陷入局部最優的問題,且魯棒性較好。
圖5 SATC-GWO算法所得雙機協同攻擊區Fig.5 Cooperative attack zone of two aircrafts by SATC-GWO algorithm
圖5~圖8分別為4種智能優化算法所得雙機空間構型最優時,雙機協同攻擊區的仿真圖。SATC-GWO算法所得構型為無人機在有人機正前方79 km,雙機協同攻擊區可以達到19.3×104km3;GWO算法所得構型為無人機在有人機左前方5.6° 77 km處,協同攻擊區為18×104km3;ABC算法所得構型為無人機在有人機右前方10.3°方向80 km處,協同攻擊區為17.1×104km3;PSO算法所得構型為無人機在有人機左前方13.4°方向68 km處,協同攻擊區為16.9×104km3.
圖6 GWO算法所得雙機協同攻擊區Fig.6 Cooperative attack zone of two aircrafts by GWO algorithm
圖7 ABC算法所得雙機協同攻擊區Fig.7 Cooperative attack zone of two aircrafts by ABC algorithm
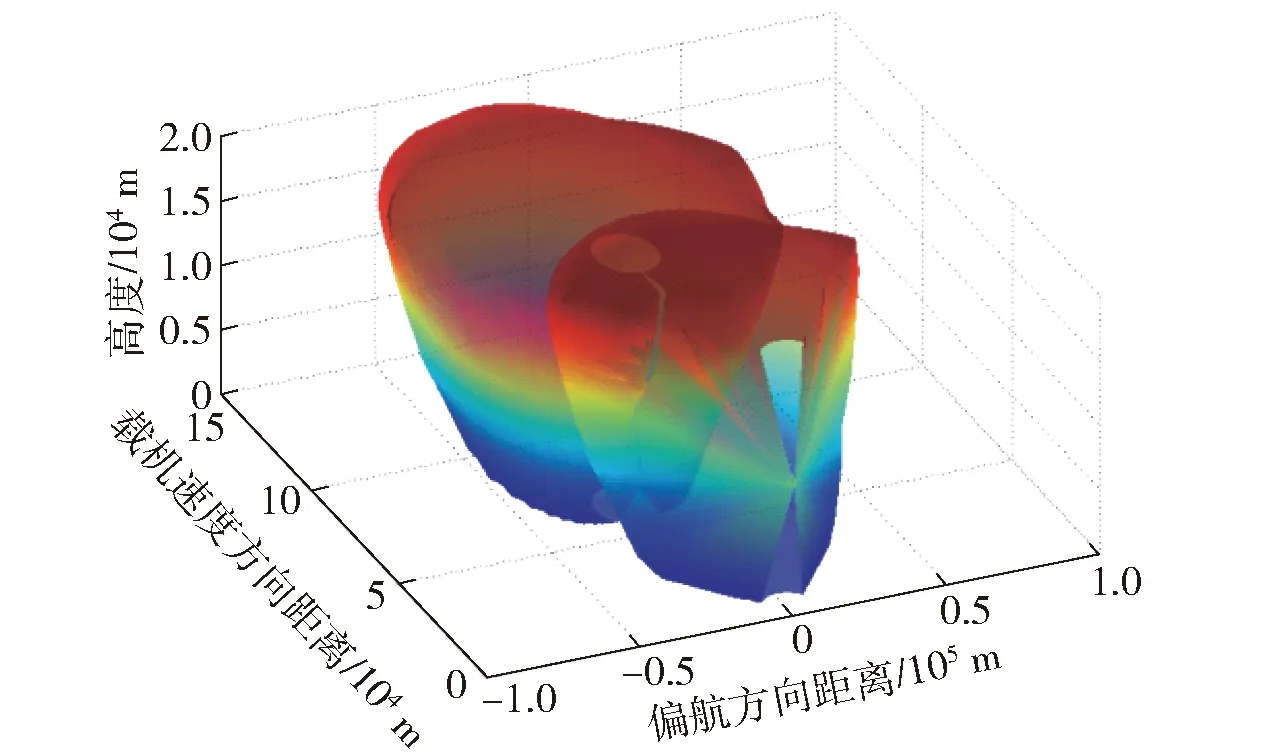
圖8 PSO算法所得雙機協同攻擊區Fig.8 Cooperative attack zone of two aircrafts by PSO algorithm
由仿真結果對比可得,SATC-GWO算法所得雙機構型下協同攻擊區域最大。該構型中有人機在后,無人機在有人機正前方79 km,雙機協同攻擊區達到19.3×104km3. 有制導能力的單架有人機的攻擊區域為7.9×104km3,在有人機與無人機的相互協同下,協同攻擊區域大于單架有人機攻擊區域的兩倍。可見雙機協同攻擊區的攻擊效果要優于兩架單機攻擊區的簡單疊加。
這種構型適應于敵方來襲方向明確的場景,敵來襲方向的火力縱深得以變大,火力密度得以增強。該構型的優勢在于:無人機相對于有人機價值較低,毀傷代價較小,可以部署在構型前方;有人機在后方既能為無人機提供制導,也能為無人機提供火力掩護,還能保證自身的相對安全。
5.2 3機空間構型尋優
假設有人機為長機,其他兩架飛機為僚機。設搜索空間維度為D=4,即兩架僚機分別相對于長機的方位、距離,算法參數和仿真平臺與雙機空間構型尋優相同。仿真結果顯示,在最優構型中,3機組合為1架有人機、2架無人機。具體仿真結果如圖9和圖10所示。
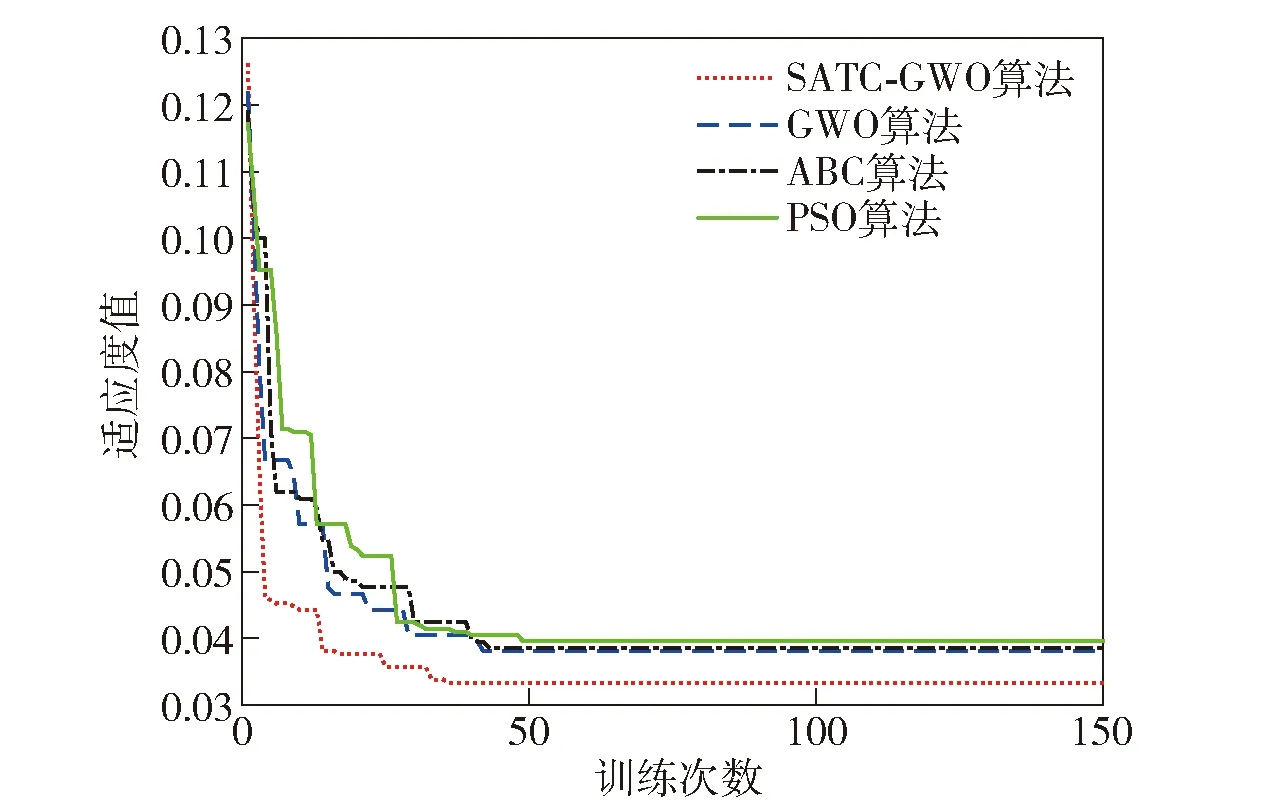
圖9 3機協同攻擊區尋優過程Fig.9 Optimal curves of cooperative attack zone of three aircrafts
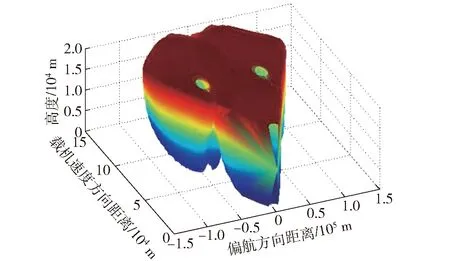
圖10 3機協同攻擊區Fig.10 Cooperative attack zone of three aircrafts
由圖6可知,在SATC-GWO算法中,當迭代次數為35代時,基本可以得到最優解。在最優解中,一架無人機位于有人機的方位為31.0°,距離為85 km,另一架無人機位于有人機的方位為30.5°,距離為85 km,3機協同攻擊區域大小為29×104km3,大于單機攻擊區的3倍。3機空間最優構型如圖10所示,該構型呈倒三角形狀,兩架無人機分別部署在有人機前方兩側,有人機部署在后方。在敵來襲方向上,無人機作為第一梯隊對敵方進行攻擊,有人機在后方進行制導并提供掩護。
5.3 四機空間構型尋優
假設其中一架有人機為長機,其他3架飛機為僚機。設搜索空間維度D=6,即3架僚機分別相對于長機的方位、距離,其他條件和雙機空間構型尋優相同。最優構型下攻擊區仿真結果如圖11所示。
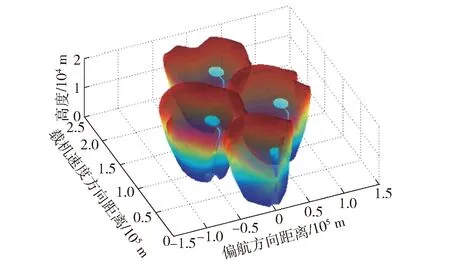
圖11 4機協同攻擊區Fig.11 Cooperative attack zone of four aircrafts
圖11所示空間構型基本上為菱形,由3架有人機和1架無人機組成。側翼兩架僚機相對于長機的方位角分別為30°、-30°,距離為98 km,無人機位于長機正前方168 km. 由4機協同攻擊區圖可以看到,在4機最優構型下,火力縱深已經達到200 km以上,且火力密度與前兩者最優構型相比變得更大。
為了比較目標航向角發生變化時,最優空間構型下的攻擊區體積變化情況,在我機航向為180°的情況下,對不同目標航向角的最優攻擊區進行仿真,仿真結果如圖12所示。
圖12 最大攻擊區隨目標航向角變化曲線Fig.12 Changing curves of the biggest attack zone
由仿真結果可以發現:當目標航向角為0°,即目標與我機呈正對頭態勢時,最優空間構型下的攻擊區最大;隨著目標航向角絕對值變大,即目標航向向側方偏移,最優構型下攻擊區會逐漸減小。
在最優空間構型的應用上,可以在求得航空集群最優空間構型后,先讓無人機從起飛線起飛飛向截擊線,再讓有人機起飛并飛向截擊線,使航空集群在截擊線附近構成最優空間構型。由于飛機在飛行過程中會存在一定的偏差,在對目標實施攻擊之前,航空集群可以在最優空間構型誤差允許的范圍內在截擊線附近進行小范圍的波動。
6 結論
本文得到了航空集群空空導彈協同攻擊區的求解方法,利用SATC-GWO算法得到了使協同攻擊區最大的航空集群最優空間構型,并通過仿真驗證對航空集群空間構型進行了尋優。主要結論有:
1)建立了航空集群空間協同攻擊區數學模型,結合有人/無人機協同攻擊區解算方法,提出了協同攻擊區邊界搜索方法,得到了一般構型下的航空集群協同攻擊區。
2)針對GWO算法易陷入局部最優的問題,將自適應Tent混沌搜索方法應用到GWO算法中,對算法進行改進,得到SATC-GWO算法。以協同攻擊區域大小作為評價指標,利用SATC-GWO算法對多機空間構型進行尋優。仿真結果表明,改進后的算法在多機空間構型尋優中,提高了尋優速度和精度。
3)對多機空間構型尋優結果表明,雙機最優空間構型為前后構型,3機最優空間構型為倒三角構型,4機最優空間構型為菱形構型。以上最優空間構型可以為提升航空集群的作戰效能提供理論支撐與借鑒。