基于最大橫截面積的馬鈴薯分級及切割策略研究
2019-05-24 09:48:14林澤鴻
農機化研究 2019年7期
林澤鴻
(1.哈爾濱學院 工學院,哈爾濱 150086;2.哈爾濱工程大學 機電學院,哈爾濱 150001)
0 引言
近幾年,中國的馬鈴薯種植面積一直居于世界領先地位。據農業部相關數據,“十三五”期間,馬鈴薯種植面積擴大到0.07億hm2以上,平均產量提高到19 500kg/hm2,總產達到1.3億t左右;優質脫毒種薯普及率達到45%,適宜主食加工的品種種植比例達到30%。中國食品工業協會馬鈴薯食品專業委員會組織編制的《馬鈴薯加工業“十三五”發展規劃(2016-2020)》中指出:我國馬鈴薯種植業相對落后,廣泛采用效率低、成本高的人力種薯切種方法,需加強裝備制造創新,同時重點發展與馬鈴薯加工業相關的育、耕、種等主要生產過程使用的先進裝備,提高信息收集、智能決策和精準農田作業及精深加工能力。可見,對馬鈴薯自動化切割策略研究將為馬鈴薯自動化種植打下良好的基礎。
1 研究現狀
機器視覺因其無損、快速等特點在農產品檢測中得到了廣泛應用[1-2]。在馬鈴薯分級與切種方面,田海韜等[3]提出一種基于機器視覺技術的芽眼識別方法,分別從彩色空間和灰度空間進行閾值分割,結合兩個空間的分割結果后利用數學形態學處理方法標記出芽眼,獲得了較高識別準確率。李錦衛等[4]提出了快速亮度截留與快速G截留兩種圖像分割方法,可以用馬鈴薯表面特征將馬鈴薯表面疑似缺陷一次性分離出來。鄭冠楠等[5]根據馬鈴薯大小、外形、顏色和邊界等特性進行馬鈴薯在線綜合檢測分級。郁志宏等[6]提出一種基于歐氏距離的算法對發芽馬鈴薯進行檢測,結合形態學中的孔洞填充和移除小目標實現對發芽區域的準確分割,得到較高的發芽馬鈴薯識別率。許偉棟等[7]提出了一種基于高通濾波的馬鈴薯機械損傷檢測方法,能夠準確識別馬鈴薯的機械損傷缺陷。
可見,現階段機器視覺技術在馬鈴薯品質檢測方面已經取得了較為豐碩的研究成果,但針對馬鈴薯自動切種的相關研究不多。已有研究主要由芽眼識別研究、三維重建研究和品質分級研究組成,其中芽眼識別主要基于機器視覺技術在灰度空間或彩色空間進行識別,需要進行擺拍且馬鈴薯完全清洗干凈;三維重建技術主要應用于農作物生物學特性和機器人的研究,對于切割種薯重建意義不大;品質分級研究針對馬鈴薯的大小、形狀、出芽、綠皮、損傷和腐爛等情況,主要應用于品質鑒別,而種薯相當一部分在播種時已薯芽萌出且表皮皺縮,現有的分級策略并不適用。為此,本文提出的分級方法和切割策略主要基于ZMP理論進行馬鈴薯穩定姿態研究,適用于自主達到穩定姿態的馬鈴薯分析;并通過頂部和側面攝像的方法,在二維層面上解決了最大橫截面積確定問題,進而進行分級和切割策略分析與研究。
2 基于ZMP的馬鈴薯分級切割算法
2.1 基于ZMP理論的馬鈴薯穩態研究
零力矩點 ZMP(Zero Moment Point)主要應用于判定機器人在運動過程中運動姿態及穩定性等問題[8-9],本文將改進的ZMP理論應用于馬鈴薯姿態分析。馬鈴薯隨意扔放在地面上會受到地面向上的作用力F,作用點為P,對應的零力矩點ZMP的定義為合力F的作用點P,具體如圖1所示。
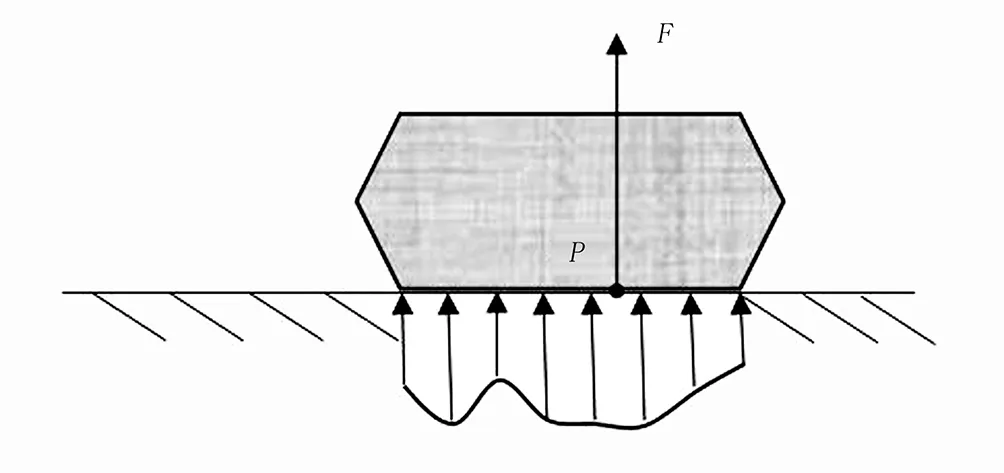
圖1 零力矩點(ZMP)定義Fig.1 Zero moment point definition
在二維平面內,除了F以外,接觸面還受水平摩擦力,該力的方向與扔置方向或運動方向相反。其中,垂直和水平方向單位長度的作用力大小分別用p(x)和q(x)表示,如圖2和圖3所示。垂直和水平的受力可以通過等效力和等效力矩代替,進而簡化結果如圖4所示。
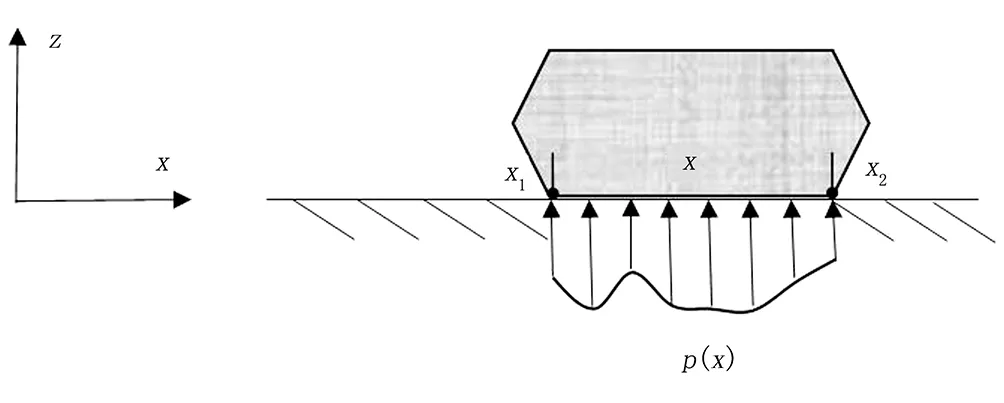
圖2 垂直方向力分布Fig.2 The vertical force distribution

圖3 水平方向力分布Fig.3 The horizontal force distribution
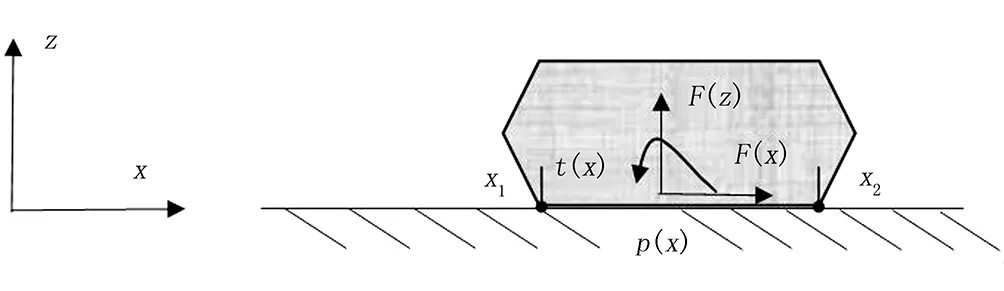
圖4 等效力和等效力矩Fig.4 The equivalent force and equivalent moment
其中,F(x)和F(z)分別為水平方向和垂直方向的合力,t(px)為繞點px的等效力矩,可得

(1)
(2)
(3)
考慮px為合力矩為0的點(ZMP),則有t(px)=0,將其帶入式(3)可得
(4)
由上文可知,p(x)為垂直方向單位長度的受力大小,點px為中心點。在馬鈴薯與地面接觸的過程中,只有當中心點px落在馬鈴薯最大橫截面積內時,馬鈴薯才能相對穩定并最終靜止,否則受力不平衡會繼續翻滾。通俗地講,馬鈴薯不受外力的情況下不可能“立”或“倒立”在地面上,“趴”(姿態1)和“側臥”(姿態2)為穩定姿態。實驗中,姿態1和姿態2以概率87%和13%存在,因此從頂部和側面分別進行拍攝完全能鑒別馬鈴薯整體大小和形狀。
2.2 灰度閾值截留分割
大量實驗表明:馬鈴薯出芽部位的顏色比正常薯皮及泥土的顏色要淺要亮,但在灰度直方圖上僅占有極小的比例,且不呈現凸顯的波峰,即常規的多閾值方法很難直接識別芽體。因此,對于芽體萌出且表皮皺縮的馬鈴薯種薯而言,只保留感興趣的深色區域可以在去除芽體對馬鈴薯整體輪廓識別效果的影響。選取亮度(Intensity,I)作為灰度空間參數,即
(5)
其中,R對應紅色分量,G對應綠色分量,B對應藍色分量,R、G、B及I∈[0,255]。將其等分為黑色部分[0,127),白色部分[127,255],實驗中只保留其中的黑色部分,灰度閾值截留分割將用于芽體剔除以精準識別馬鈴薯輪廓。
2.3 最大橫切面積獲取及分級策略
本文算法要得到馬鈴薯的最大橫切面積,需要從馬鈴薯側面和頂部分別拍攝照片。具體而言,圖像獲取采用CCD彩色數碼相機,三基色日光型環形燈管為照明設備,為使圖片擁有相同的漫反射光照條件,在兩個相機對側用白色A4紙為背景。馬鈴薯的形狀大多是球形和橢球形,在實驗中馬鈴薯的姿態是隨意的,這有利于算法向傳送帶等生產實踐應用。獲得馬鈴薯原始圖像為24位真彩色JPG格式,分辨率均為640×480。圖5給出了近球型馬鈴薯和橢球形馬鈴薯的采集和處理過程。算法目標為切割,馬鈴薯為類球形還是橢球形對切塊影響不大。具體按以下幾個步驟完成:
1)將同一馬鈴薯姿態1和姿態2的圖5(a)應用Sobel算子進行邊緣提取得到圖5(b);
2)因圖5(b)突出的頂芽將影響分級的準確性,通過灰度閾值截留分割進行邊緣平滑得到圖5(c);
3)根據邊緣平滑結果得到圖5(d);
4)判斷姿態1和姿態2兩者的有效投影面積較大者,并以此為分級標準;具體而言,分別在有效投影上取最長直徑D1和D2,取D=max(D1,D2)所對應的照片保留;
5)將D與分級大小的閾值相比, 將馬鈴薯分為一級馬鈴薯、二級馬鈴薯、三級馬鈴薯和等級外馬鈴薯等 4 個等級,完成馬鈴薯的大小分級;
6)按照分級結果完成切割,根據分級閾值設定,一級馬鈴薯切成4塊,二級切成3塊,三級切成2塊,等級外馬鈴薯可以不分割。

馬鈴薯A 姿態1(a)原圖 (b)邊緣提取 (c)邊緣平滑 (d)有效投影

馬鈴薯A 姿態2(a)原圖 (b)邊緣提取 (c)邊緣平滑 (d)有效投影

馬鈴薯B姿態1(a)原圖 (b)邊緣提取 (c)邊緣平滑 (d)有效投影
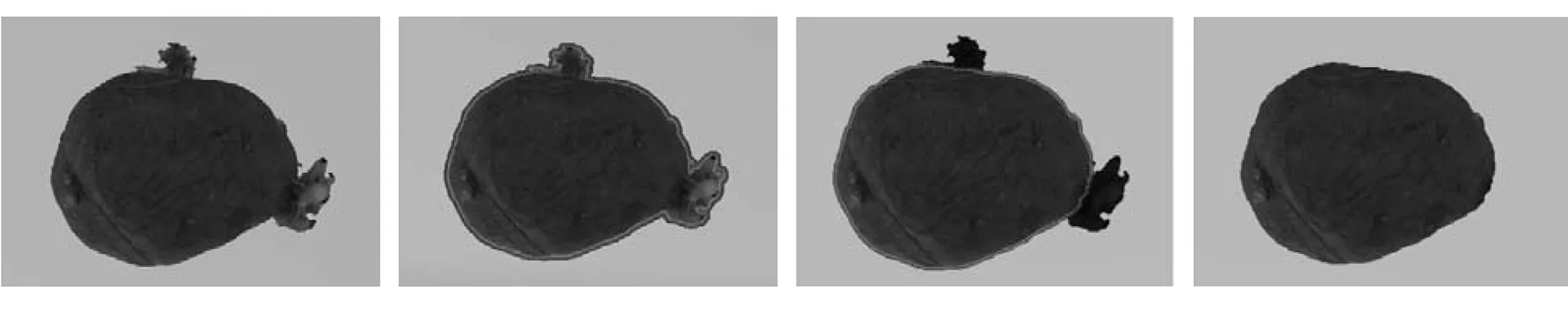
馬鈴薯B姿態2(a)原圖 (b)邊緣提取 (c)邊緣平滑 (d)有效投影圖5 馬鈴薯圖像處理過程Fig.5 The potato image processing
3 測試與分析
3.1 穩定性測試
為了驗證本文提出的分級及切割馬鈴薯策略,對80個馬鈴薯進行了5次分級實驗,并進行人工分級對比,分級測試效果如圖6所示。
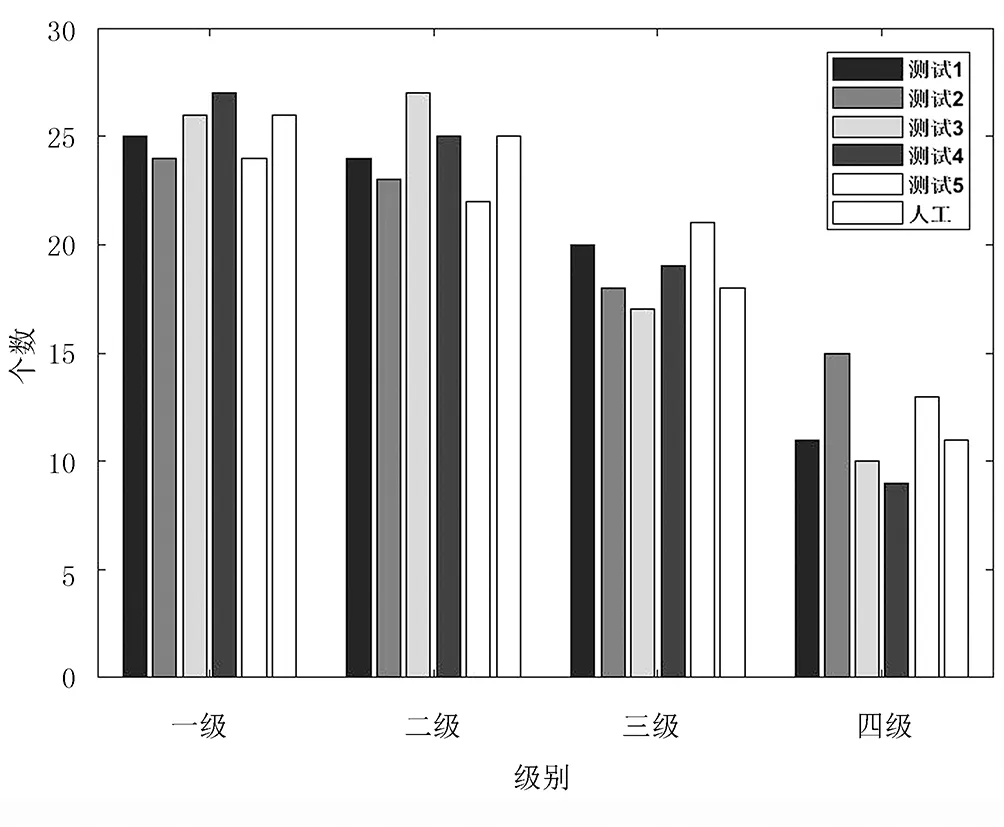
圖6 分級測試效果對比Fig.6 Grading test result contrast
由圖6可知:分級效果相對于人工數據偏差不大,為了系統地對分級效果進行測試,具體誤差分析如表1所示。
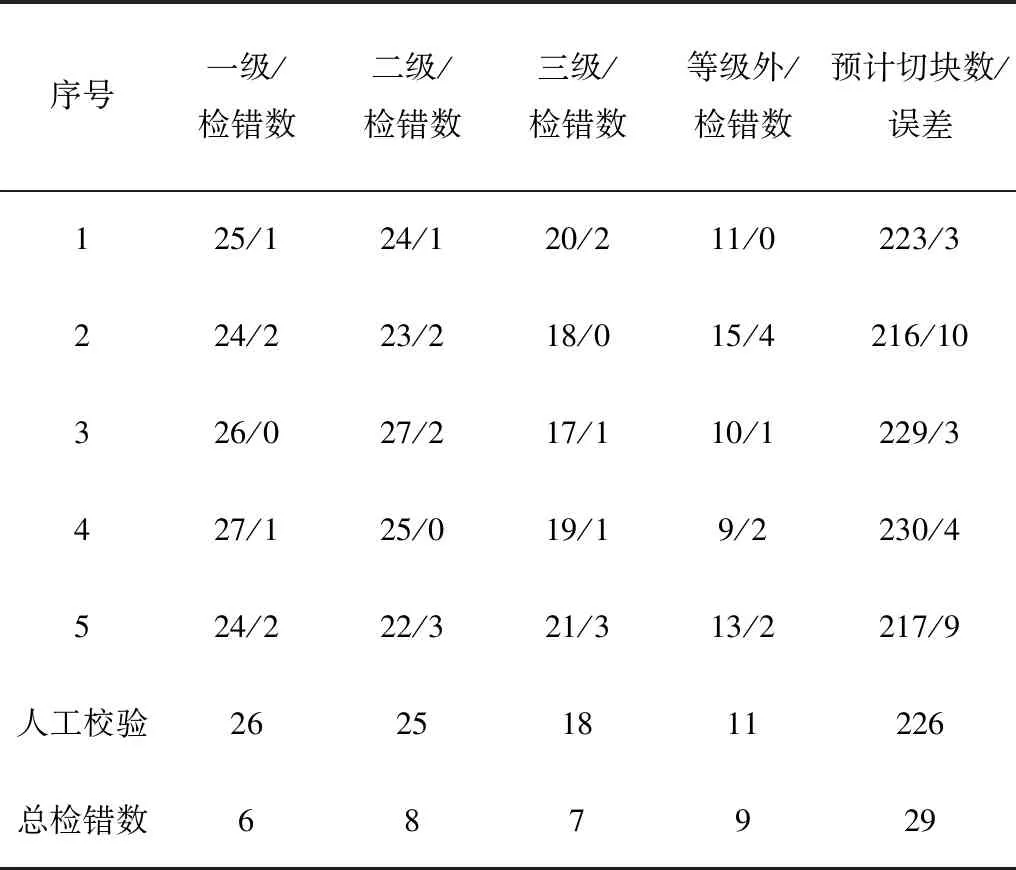
表1 馬鈴薯分級結果分析Table 1 Potato grading result analysis
在實驗中,分錯數為x=30,馬鈴薯總數為y=400,則馬鈴薯分析錯誤率p=x/y為7.5%,可見機器識別的準確率區q=(y-x)/y可以達到92.5%。
3.2 切割效果分析
為了保證種植效果,切割要達到的標準為切塊質量不應小于20~25g,且每個切塊上至少要帶1~2個芽眼。基本方案為一級馬鈴薯可以縱切為4塊,這樣有利于增加帶頂芽的塊數。 對于大薯塊來說,可以從種薯的尾部開始,按芽眼排列順序螺旋形向頂部斜切,最后將頂部一分為二;二級馬鈴薯切成3塊,方法是先從基部切下帶2個芽眼的1塊,剩余部分縱切為2塊;三級馬鈴薯可從頂部到尾部縱切成2塊;等級外馬鈴薯不用切割。
實驗數據集按人工校驗結果可得226個切塊,機器識別并進行切割得到的預計種塊數如表1所示。由表1可知:總偏差為29塊,最大偏差為10塊,均在容錯范圍之內。
4 結論
提出了基于最大橫截面積的馬鈴薯分級及切割策略。研究發現:通過零力矩點分析得出馬鈴薯兩種常見穩定姿態分別占比為87%和13%,因此可以采取頂部和側面攝像機進行采集,并在二維維度進行邊緣提取和邊緣平滑處理,進而得到馬鈴薯的最大有效投影面積,并以此為依據進行分級和切割策略分析。實驗表明:本方法分級準確性達到92.5%,對應的切塊策略誤差較小,對表皮皺縮且薯芽萌出的種薯識別效果良好,可為后續自動化切割及種植提供借鑒。