PID神經元網絡在水稻秧棚控制系統中的應用研究
2019-05-24 09:48:18黃金俠宋國義王俊發
農機化研究 2019年7期
黃金俠,侯 艷,宋國義,王俊發,李 晶
(佳木斯大學 a.信息電子技術學院;b.機械工程學院,黑龍江 佳木斯 154007)
0 引言
俗語說“十成稻,九成秧”,可見,秧苗的質量對水稻生產起著非常重要的作用。水稻生產主要包括稻種催芽、秧棚育秧和稻田種植3個階段,為秧苗生長創造適宜的環境是提高秧苗質量的關鍵所在[1]。黑龍江省是我國重要的水稻生產地,水稻種植面積正逐年擴大,為了減少人力、優化育秧環境、降低生產成本,建立大規模群體水稻育秧棚實施水稻智能化育秧已經成為水稻秧苗生產的必然趨勢。但是,目前我國群體水稻育秧棚的控制大部分采取人工控制或半自動控制,造成勞動強度大、育秧成本高,無法實現信息化與自動化生產。為此,本課題組設計了基于PID神經元網絡的水稻秧棚自動控制系統。經仿真和農場實驗,達到了很好的控制效果。
水稻育秧棚是一個非線性、多變量、強時變、交叉耦合及參數變化大的復雜對象,傳統PID控制器是線性的,依賴于被控對象精確的數學模型,在用于控制具有不確定性、時變性和非線性等復雜系統時,不容易獲得滿意的控制效果。PID具有結構簡單、魯棒性強的特點,BP神經網絡控制不需精確的數學模型,具有非線性逼近能力,具有自組織、自學習和自適應能力,使其可以適應多變量耦合系統的非線性、復雜等問題,但神經網絡控制也存在收斂速度慢等問題。本文將PID控制與神經網絡控制相融合,揚長避短、發揮他們各自的優勢[1],建立了一種新型的多變量耦合的PID神經元網絡控制器。此控制器不需要測量或辨識對象的內部結構和參數,通過在線測量系統給定值和輸出值,自主學習,調整網絡權值,并同時完成系統解耦控制工作,使強耦合、時延和多變量復雜系統具有良好的動態和靜態性能[2-3]。
1 育秧棚結構及控制系統原理
水稻秧棚智能控制系統突破了傳統控制理念,采用無人操作,在傳統控制基礎上,結合計算機技術、傳感器技術、神經網絡技術等高科技手段,實現對秧棚系統各環境參數實時控制。本設計采用上位機(PC機)與下位機(單片機)聯合控制,上位機與下位機之間通過無線通信模塊實現數據傳輸。下位機通過傳感器實時采集育秧棚內環境參數(如溫度、濕度、光照、二氧化碳氣體濃度等)等物理量,并傳送給上位機;上位機經過處理、預測判斷和分析比較后將控制命令發回給下位機,下位機再依照命令對秧棚內環境控制系統的各個執行機構(軸流風機、噴灌閥、加熱閥和卷簾門)發出控制指令,完成秧棚環境系統的調控。水稻育秧棚系統結構如圖1所示。
在秧棚內環境參數(如溫度、濕度、光照、二氧化碳氣體濃度等)控制中,二氧化碳濃度和光照強度兩參數控制方法簡單、易于實現,時滯性與非線性較小,因此采用傳統的比例-積分-微分控制算法可實行有效控制[3]。溫度和濕度是影響水稻生成最重要的兩個決定性因素,且溫度和濕度之間有較強的耦合性,因此本設計只對環境溫度和濕度參數采用PID神經元網絡解耦控制方法,以溫、濕度作為控制器的輸入,調控溫、濕度的裝置作為輸出量。控制系統結構如圖2所示。

圖1 系統結構圖Fig.1 System structure

圖2 控制系統基本結構Fig.2 Basic structure of control system
2 秧棚PID神經元網絡解耦控制系統設計
2.1 秧棚PID神經元網絡解耦控制器的結構
PID神經網絡是一種動態前向的神經元網絡控制系統,主要由輸入層、隱含層和輸出層構成。PID神經元網絡如果有n個控制量輸入,就包含n個相同的并列子網絡,各子網絡的輸入層至隱含層之間是相互獨立的。輸入層的每個子網絡(有兩個神經元)分別接受控制量的給定值和實際值;每個子網絡的隱含層由3個神經元(比例元、積分元和微分元)構成,它們的輸出分別與PID控制器中的比例控制、積分控制和微分控制相對應,隱含層至輸出層的連接權則是相互交叉連接的;網絡的輸出層只有一個神經元,完成PID控制規律的綜合,實現多變量系統的解耦輸出。根據輸入控制量的個數,PID神經元網絡控制器可以分為單變量、兩變量和多變量[4]。由于本設計只對溫度和濕度實現PID神經元網絡解耦控制,所以采用兩變量3層前向結構(4×6×2)的PID神經元網絡控制系統,其輸入層有4個神經元,r1、r2是控制量(溫度、濕度)的給定值,y1、y2是控制量(溫度、濕度)的實際值。隱含層包括兩個比例元、兩個積分元和兩個微分元6個處理元,輸出層有2個輸出神經元。v1、v2是神經元網絡計算得到的控制律,ωij、ωjk是PID神經網絡權值。輸入層與隱含層之間是按子網獨立的,隱含層與輸出層之間是互相交叉[4]耦合的。兩個輸入變量的PID神經元網絡控制器結構如圖3所示。
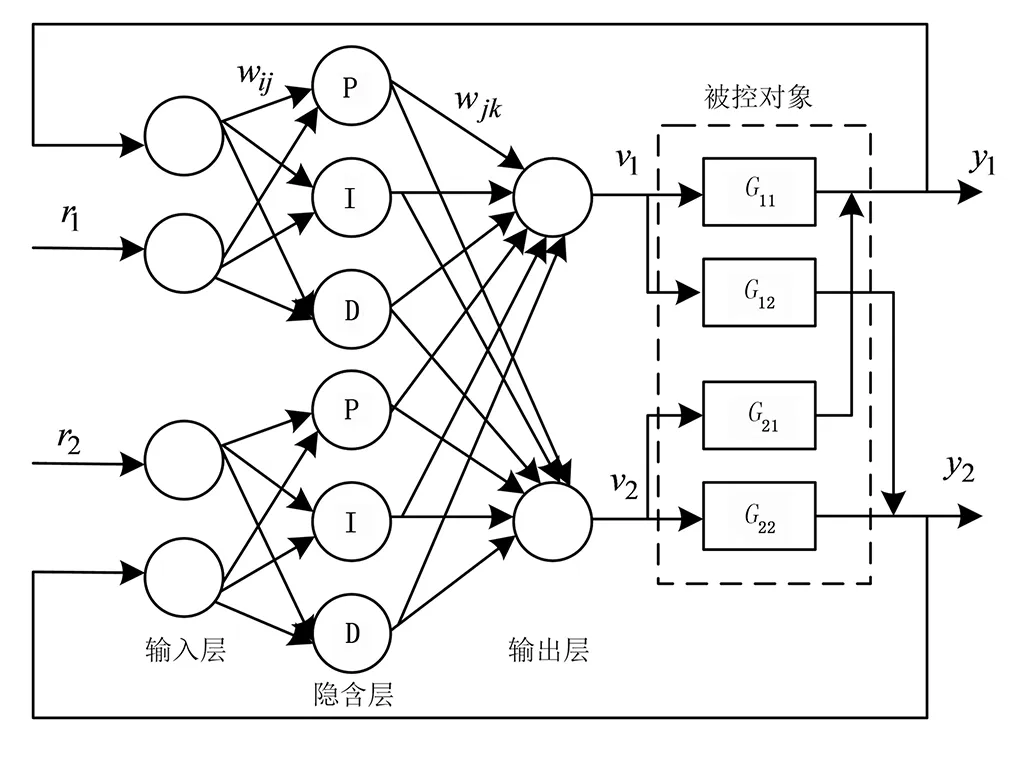
圖3 PID神經元網絡控制系統結構Fig.3 PID neural network control system structure
2.2 PID神經元網絡解耦控制系統計算
2.2.1 控制律計算
PID神經元網絡的輸入量為溫度和濕度的實際值(y1和y2)和給定值(r1和r2),運用PID神經元網絡的自主學習和調整功能[5],對育秧棚環境參數進行 控制。設k為各層的任意時間。各層的輸入與輸出計算公式如下:
1)輸入層。多輸入PID神經元網絡的輸入層的神經元是相同的,表示為
fsi(k)=usi(k)
(1)
輸入層神經元的輸出函數為
(2)
2)隱含層。PID 神經元網絡系統的隱含層是由6個神經元(2個比例、2個積分和2個微分)構成,它們的輸入值相同,關系式為
(3)
隱含層中比例、積分和微分神經元輸出的計算公式各不相同,如式(4)~式(6)所示,即
(4)
(5)
(6)
隱含層各神經元的輸出函數為[4]
(7)
3)輸出層。育秧棚PID 神經元網絡輸出層有2個神經元。輸出層的2個神經元的輸出為隱含層全部神經元的輸出值加權和,即
(8)
輸出層神經元的輸出函數為[6]
(9)

2.2.2 權值修正
PID神經元網絡控制器在控制過程中根據控制量誤差按照梯度修正法修正網絡權重值,通過在線訓練和學習,使得控制量不斷逼近給定值,網絡權重值修正如下所示。
誤差反向傳播計算公式為
(10)
其中,l為每批采樣點數;rp(k)為實際輸出值;yp(k)為給定值。
1)隱含層至輸出層權值調整。迭代公式為
(11)
2)輸入層至隱含層權值調整。迭代公式為
(12)

3 基于MatLab/SIMULINK仿真研究
為了驗證PID神經元網絡控制器的效果, 本文采用MatLab/Simulink軟件對基于PID神經元網絡控制器的育秧棚溫、濕度控制系統進行了仿真。MatLab軟件中的Simulink軟件包可以對連續、離散或混合的線性和非線性系統進行建模、仿真和結果分析[8],采用模擬育秧棚環境的溫室作為被控對象,因濕度和溫度相互影響,根據多變量的解耦、 園藝經驗及多次的測量結果,可以把被控對象輸入輸出關系描述為[7]
(13)
其中,y1、y2分別為濕度和溫度值;u1、u2為PID神經元網絡的輸出。
仿真模塊如圖4所示。其中,Step為階躍輸入信號,Scope為輸出示波器,控制系統見式(13)。PID Neural Net Controller模塊是調用PID Ctr函數模塊,具有4個輸入、2個輸出,控制模塊的輸出作為被控系統的輸入。調整各仿真控制參數,運行Start控制按鈕,雙擊示波器模塊,即可對系統進行動態仿真。仿真結果如圖5和圖6所示。由圖5、圖6可以看出:經過對PID神經元網絡解耦控制系統訓練后,在初始時刻沒有太大的波動,運行穩定,超調量較小,調節時間短;在平穩期,穩態誤差為零。該控制系統經過現場實際應用達到了很好的在線解耦效果,滿足水稻育秧棚溫、濕度環境的控制要求。提高了系統的控制精度和穩定性。
為對比設計的控制算法的優越性,圖7和圖8是采用傳統PID 控制的仿真圖。由此可見,常規PID控制會有較大的超調量,穩態誤差較大,回復時間較長。

圖4 PID神經元網絡模型解耦控制器系統仿真模型Fig.4 Simulation model PID neural network decoupling controller system
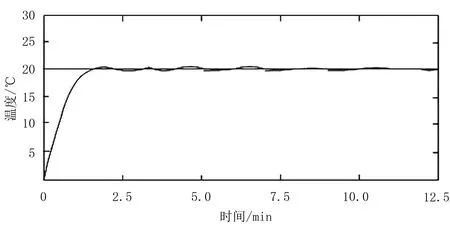
圖5 PID神經元網絡溫度響應曲線Fig.5 Temperature response curve of PID neural network
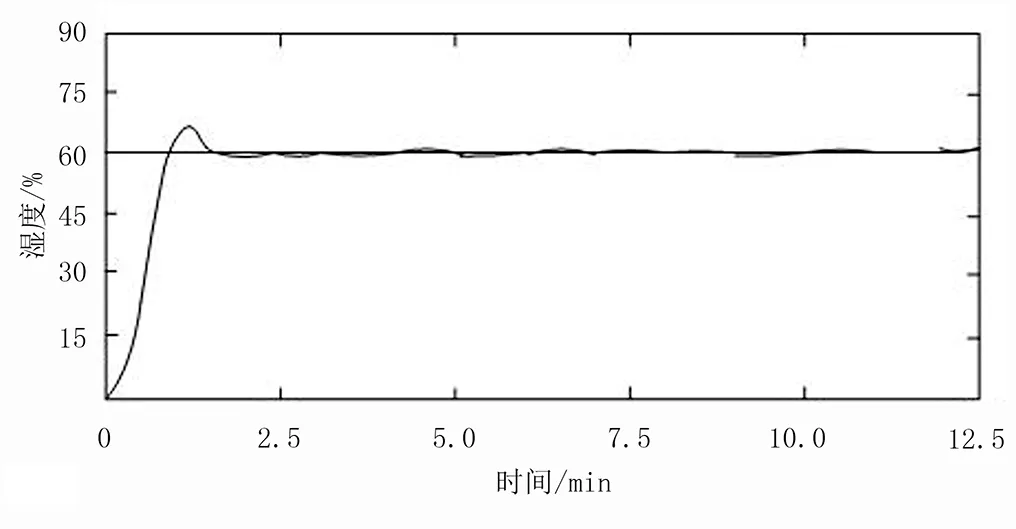
圖6 PID神經元網絡濕度響應曲線Fig.6 Humidity response curve of PID neural network
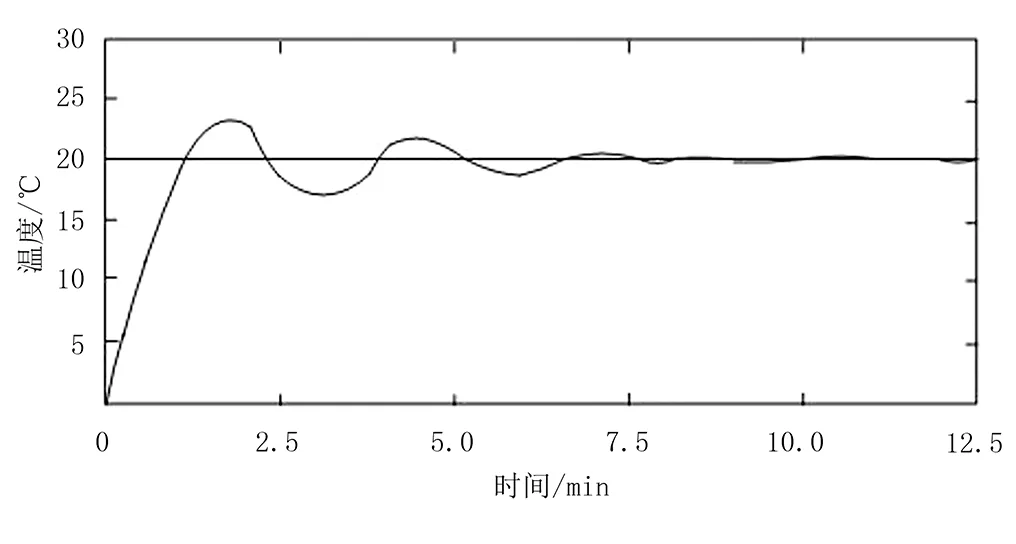
圖7 PID溫度響應曲線Fig.7 PID temperature response curve

圖8 PID濕度響應曲線Fig.8 PID humidity response curve
4 結論
本文所采用的PID神經元網絡育秧棚控制系統,結構簡單、操作方便、自動化程度高。仿真結果表明:PID神經元網絡控制器能夠基本消除育秧棚內變量之間的耦合作用,控制器不依賴被控對象的數學模型,可實現系統的響應速度快、超調小甚至無超調,對參數變化有較強的適應能力和抗干擾能力,從根本上大大提高了系統的動態品質和穩態精度,改善了系統的整體性能。該控制系統經過農場實際應用也達到了很好的控制效果,易于在廣大稻區普及推廣,可為溫室種植提供良好的理論依據和技術支持。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2020年6期)2020-06-22 08:41:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
文苑(2019年22期)2019-12-07 05:29:00