工作高度對撲翼飛行器氣動特性影響分析
2019-05-24 14:11:40胡洪彬余波杜強
電腦知識與技術 2019年4期
胡洪彬 余波 杜強

摘要:為了得到撲翼飛行器在大氣邊界層中不同工作高度的飛行狀態,采用基于標準的k-ε湍流模型,以大氣邊界層梯度風剖面為入口邊界條件,結合Fluent的滑移網格技術,分別對撲翼飛行器在不同工作高度的氣動特性進行數值模擬,得到其升阻力系數。計算結果表明,撲翼飛行器的升阻力系數隨高度的增加而增加,在標準參考高度以下時,升阻力系數增加幅度較大;在標準參考高度以上時,升阻力系數增加幅度較小。
關鍵詞:撲翼飛行器;大氣邊界層;滑移網格;工作高度;氣動特性
中圖分類號:V211.3 文獻標識碼:A 文章編號:1009-3044(2019)04-0233-03
Abstract: In order to obtain the flight state of the flapping-wing air vehicle at different working heights in the atmospheric boundary layer, a standard-based k-ε turbulence model is adopted, and the atmospheric boundary layer gradient wind section is used as the inlet boundary condition, combined with Fluent's sliding mesh technology, respectively. The aerodynamic characteristics of the flapping-wing air vehicle at different working heights are numerically simulated to obtain the coefficient of lift resistance. The calculation results show that the lift resistance coefficient of the flapping-wing air vehicle increases with the increase of the height. When the standard reference height is below, the lift resistance coefficient increases more; when the standard reference height is above, the lift resistance coefficient increases less.
Key words: flapping-wing air vehicle; atmospheric boundary layer; sliding mesh; working height; aerodynamic characteristics
1 引言
撲翼飛行器是仿照自然界中鳥類和昆蟲飛行方式的一種新型仿生機器人,相比現有的旋翼和固定翼飛行器而言,更具有機動性強、飛行更節能的特點,能夠在戰場偵察、電網線路巡查、森林防護等方面發揮重要作用。在實際飛行中,撲翼飛行器是身處在風速隨高度變化的近地面梯度風流場內,也稱為大氣邊界層。學術界針對撲翼飛行器在大氣邊界層中的研究目前還很缺少,撲翼飛行器的相關研究普遍采用傳統的均一風速的工業風洞,這與撲翼飛行器實際工作中的流場環境明顯不同。而且在實際飛行中,高度隨時變化,流場環境也隨高度變化,因此有必要探究下不同工作高度對撲翼飛行器氣動特性的影響,從而為控制系統提供真實可靠的實時數據,讓智能控制飛行更加穩定。
2 撲翼飛行器翅翼模型及撲動方式
綜合考慮文獻6和文獻11,翅翼采用斷面翼型為S性的2032cjc,翼型的根部弦長為110mm,中部弦長為108mm,翼梢部分弦長為20mm,單邊翅翼長度為280mm,面積為252.36cm2的后緣漸變弧形剛性翅翼。翅翼三維模型如圖1所示。
通過觀察自然界鳥類的飛行不難發現,鳥類翅膀為左右對稱撲動,即左右翅翼上下撲動角度、時間完全一致。為滿足鳥類撲翼原理要求,雙曲柄雙搖桿機構基本能夠還原鳥類撲動方式。雙曲柄雙搖桿機構模型如圖2所示。
為在Fluent中采用動網格模擬翅翼運動,需要編寫UDF程序,這就需要翅翼具體的撲動參數。基于滿足翅翼上下撲動行程比為2:3的撲動方式,計算各個部件的尺寸,通過UG軟件建立各部件的三維模型并組裝,運用Adams View軟件仿真得到翅翼角速度曲線并在MATLAB中進行曲線擬合,最終輸出角速度曲線方程。
由于機構模型的對稱性,因此,只需在Adams View中僅對機構模型的一半進行仿真。當原動件齒輪以360°/s的速度旋轉時,曲柄隨著齒輪一樣做旋轉運動。同時,曲柄又通過連桿帶動搖桿做上下拍動,從而也就實現了翅翼的撲動。借助Adams View中的后處理機可以得到翅翼的角速度曲線如圖3所示。
3 撲翼飛行器的數值計算方法
3.1 網格生成及動網格設置
運用ANSYS ICEM軟件對翅翼表面和三維流場進行非結構網格劃分,流場區域為10m[×]10m[×]10m的正方體計算域。其中,翅翼面向入口,距離入口4m。為了更好捕捉翅翼模型表面,需要對翅翼的面網格進行微細劃分。在ICEM中共生成6094034個控制體,最小控制體體積為7.40571e-06,滿足最小體積為正值的要求。
本文采用Fluent滑移網格技術對翅翼運動進行模擬,通過單獨建立一個包裹翅翼在內的圓柱體的小型區域,該區域壁面為interface類型,起到內外區域數據傳遞的接口。與一般采用彈簧光順加上局部重劃的動網格技術比較,滑移網格具有更快的計算速度和更高的計算精度,而且不用擔心出現負體積網格,是目前運動仿真模擬計算比較先進高效的計算方法之一。指定翅翼的具體運動必須使用Fluent提供的DEFINE宏并運用基本的C語言知識編寫翅翼運動的UDF程序。對于翅翼的剛性運動,其中的DEFINE_CG_MOTION宏通過定義用戶指定的單位時間步長,并賦予指定剛體區域的線速度與角速度來達到剛體區域的運動。
3.2 邊界條件
入口邊界條件如下:來流為湍流,x方向風速剖面滿足指數律為[V(z)=Vb(zzb)α],Vb為標準參考高度處(我國規范取Zb=10m)的平均風速,考慮到本文計算域的大小,標準參考高度Zb取為6m。z為從零高度算起的垂直高度。
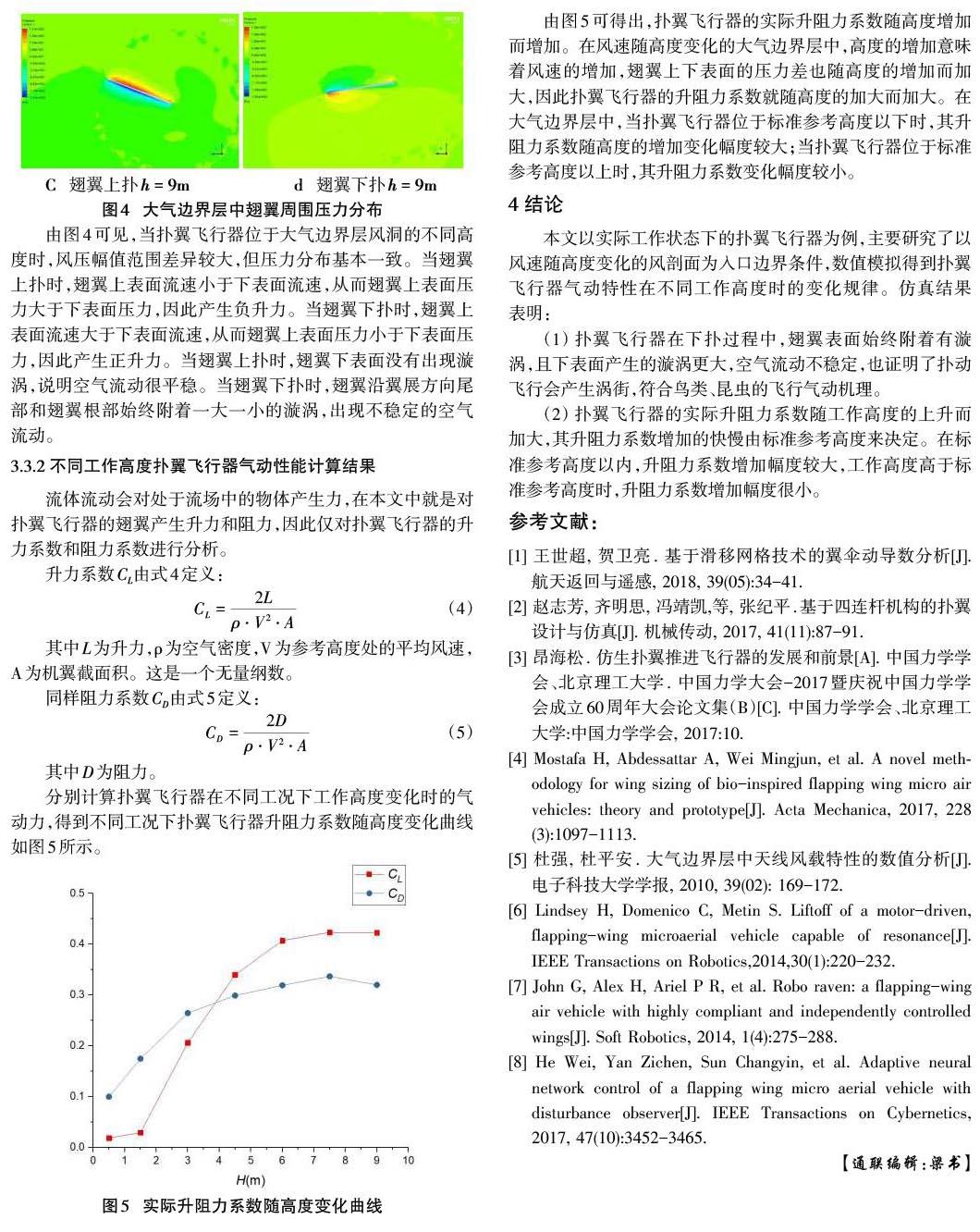
由圖5可得出,撲翼飛行器的實際升阻力系數隨高度增加而增加。在風速隨高度變化的大氣邊界層中,高度的增加意味著風速的增加,翅翼上下表面的壓力差也隨高度的增加而加大,因此撲翼飛行器的升阻力系數就隨高度的加大而加大。在大氣邊界層中,當撲翼飛行器位于標準參考高度以下時,其升阻力系數隨高度的增加變化幅度較大;當撲翼飛行器位于標準參考高度以上時,其升阻力系數變化幅度較小。
4 結論
本文以實際工作狀態下的撲翼飛行器為例,主要研究了以風速隨高度變化的風剖面為入口邊界條件,數值模擬得到撲翼飛行器氣動特性在不同工作高度時的變化規律。仿真結果表明:
(1) 撲翼飛行器在下撲過程中,翅翼表面始終附著有漩渦,且下表面產生的漩渦更大,空氣流動不穩定,也證明了撲動飛行會產生渦街,符合鳥類、昆蟲的飛行氣動機理。
(2) 撲翼飛行器的實際升阻力系數隨工作高度的上升而加大,其升阻力系數增加的快慢由標準參考高度來決定。在標準參考高度以內,升阻力系數增加幅度較大,工作高度高于標準參考高度時,升阻力系數增加幅度很小。
參考文獻:
[1] 王世超, 賀衛亮. 基于滑移網格技術的翼傘動導數分析[J]. 航天返回與遙感, 2018, 39(05):34-41.
[2] 趙志芳, 齊明思, 馮靖凱,等, 張紀平.基于四連桿機構的撲翼設計與仿真[J]. 機械傳動, 2017, 41(11):87-91.
[3] 昂海松. 仿生撲翼推進飛行器的發展和前景[A]. 中國力學學會、北京理工大學. 中國力學大會-2017暨慶祝中國力學學會成立60周年大會論文集(B)[C]. 中國力學學會、北京理工大學:中國力學學會, 2017:10.
[4] Mostafa H, Abdessattar A, Wei Mingjun, et al. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: theory and prototype[J]. Acta Mechanica, 2017, 228(3):1097-1113.
[5] 杜強, 杜平安. 大氣邊界層中天線風載特性的數值分析[J].電子科技大學學報, 2010, 39(02): 169-172.
[6] Lindsey H, Domenico C, Metin S. Liftoff of a motor-driven, flapping-wing microaerial vehicle capable of resonance[J].IEEE Transactions on Robotics,2014,30(1):220-232.
[7] John G, Alex H, Ariel P R, et al. Robo raven: a flapping-wing air vehicle with highly compliant and independently controlled wings[J]. Soft Robotics, 2014, 1(4):275-288.
[8] He Wei, Yan Zichen, Sun Changyin, et al. Adaptive neural network control of a flapping wing micro aerial vehicle with disturbance observer[J]. IEEE Transactions on Cybernetics, 2017, 47(10):3452-3465.
【通聯編輯:梁書】
