上汽-西門子機組DEH系統優化研究
2019-05-29 07:01:20房小滿
儀器儀表用戶 2019年6期
關鍵詞:指令
房小滿
(浙江省能源集團有限公司,杭州 310007)
目前,各發電集團內已有越來越多的汽輪機組開始采用上汽-西門子技術,而汽輪機電液控制系統(DEH)作為汽輪機控制的核心系統[1],其油管路設計和控制策略也基本采用西門子提供的技術路線。經過近幾年的應用,上汽-西門子機組的DEH系統暴露出一些問題,影響了機組運行的安全性與經濟性。本文在DEH油系統和控制原理分析的基礎上,對實際運行中出現的一些問題提出了相應的解決方法,以提高機組運行的安全性與經濟性。
1 邏輯優化
上汽-西門子機組的DEH邏輯一般采用制造廠提供的控制策略實施。由于DEH的邏輯設計與汽輪機的構造,特別是油系統的結構關系緊密,因而采用同一技術的汽輪機組的DEH邏輯大同小異,DEH的參數設置也基本一致。一般在基建期或大修完成調試之后,很少對DEH邏輯再做修改。但西門子在設計DEH時采用了“大DEH”的概念,DEH不是一個單純從DCS側接受流量指令完成閥位控制的閥位執行機構,而是集合了轉速控制、應力控制、主汽壓力控制、一次調頻,以及負荷控制于一體的綜合性控制系統。與其他類型機組的DEH相比,其最大的特點是在CCS控制方式下,DEH從DCS接受的是負荷指令而不是流量指令,機組出力的閉環控制實際是在DEH側實現,DEH完成的是其他類型機組中DCS側的汽機主控功能。因此,上汽-西門子類型機組的DEH參數不能保持一成不變,必須像其他類型機組中的汽機主控一樣,根據鍋爐特性和協調控制的要求進行參數的調整和優化,以獲得最佳的控制性能。
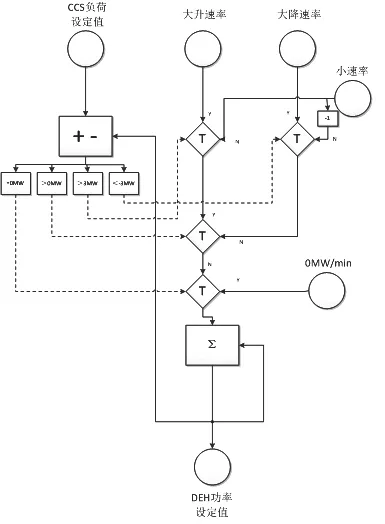
圖1 DEH功率設定值生成原理圖Fig.1 DEH Power setpoint generation schematic
經過近期對幾臺機組的調整工作,發現部分上汽-西門子機組的DEH邏輯參數設置存在不足之處,在實際運行過程中影響了機組的負荷變動和調節功能,具體情況如下。
1.1 負荷變動速率門檻值
圖1為上汽-西門子DEH系統的功率設定值生成邏輯。其原理是在每個掃描周期內,將CCS負荷設定值與DEH功率設定值進行比較,若存在偏差,則在該掃描周期內將DEH功率設定根據預設的升降速率疊加一個值,成為新的DEH功率設定值。在下一掃描周期內,重復該操作,直至CCS負荷設定值和DEH功率設定值相等。在負荷變動過程中,當CCS設定值和DEH設定值偏差大時,采用大的變負荷速率;當兩者相接近時,則采用較小的變負荷速率,使DEH功率設定值平穩地接近CCS設定值。
該回路采用了變速率的方法,實現DEH功率設定值對CCS負荷設定值的跟蹤。通過設置負荷偏差門檻值,實現在小偏差時采用較小的變負荷速率,防止DEH功率設定值過調造成的抖動。但偏差門檻值設置的合理與否,會對機組的負荷變動性能造成較大的影響。以某660MW機組為例,其DEH的變速率偏差門檻為3MW,即當CCS設定值與DEH設定值偏差在±3MW以內時,DEH側設定值僅以1MW/min的速率進行跟蹤,只有當偏差超過3MW時,才以較大的正常變負荷速率進行跟蹤。在實際運行過程中,當機組以10MW/min的速率進行負荷變動時,由于變速率門檻值的存在,在CCS負荷變化3MW以內時,DEH側的負荷指令設定值基本不變化。而在該狀態下,DEH功率設定值變化遲滯時間約為20s。這將造成汽機主控對負荷變化的響應推遲約20s,機組的負荷響應也因此受到影響。
為此,對負荷變動速率門檻值進行調整,適當減小了變負荷的偏差門檻,在提高變負荷響應能力的同時,保證DEH功率設定值的穩定。門檻值的設定需考慮變化速率和設定值的穩定性問題。若門檻值設定過小,可能造成當DEH設定值接近CCS指令時的頻繁波動,對功率的閉環控制不利;若門檻值設定過大,又會影響負荷跟蹤的速率。綜合考慮以上兩方面的因素,將門檻值由3MW改為1MW,DEH指令的響應時間基本維持在6s左右,大大改善了汽機的響應速率。
1.2 汽機主控參數調整
上汽-西門子DEH采用“大DEH”設計方式,功率閉環控制功能在DEH側實現。DEH的功率控制器與轉速控制器合二為一,在并網前進行轉速控制,并網后通過切換實現功率控制。在CCS工況下,功率控制器接受DCS送來的功率設定值對汽機進行控制。功率控制器的控制策略采用反饋+前饋的方式實現,前饋信號包含DEH功率設定值和一次調頻信號,以加快負荷的響應。從目前已有的DEH邏輯中看,由于進入控制器的控制量均進行了標幺化處理,功率控制器的PID參數和前饋的參數相對較大,以發揮汽機快速調節負荷的特點,加快負荷的響應速度。機組實際的運行情況表明,部分DEH的功率控制器參數設置過強,在穩態工況時會造成汽壓和負荷的波動。圖2是某660MW機組在穩態時的運行情況。從圖中可以看到,當主汽壓力波動時,汽機調門為控制負荷,進行反向動作,反而使主汽壓力的波動幅度更大,反而加劇了汽壓的波動,使穩態的情況惡化。
出現該情況的原因是調門對負荷偏差的響應速度過快。當汽壓出現波動時,負荷剛有偏離設定值的趨勢,調門就開始動作,試圖將負荷拉回至設定值。在這過程中,調門的動作方向是不利于汽壓穩定的,這也使得壓力的波動幅度進一步加劇,使得穩態過程的汽壓波動加劇。對此,將DEH中的功率控制器PID參數適當放低,同時將功率指令至控制輸出的前饋減小,令整個功率控制器的控制作用適當減弱,避免穩態時主要參數波動的發生。
1.3 順序閥參數調整

圖2 某660MW機組穩態工況運行情況Fig.2 Steady state operating conditions of a 660MW unit
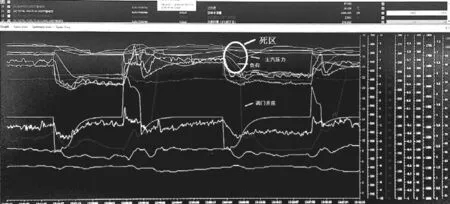
圖4 汽機調門死區Fig.4 Steam machine turnaround dead zone

圖3 順序閥邏輯Fig.3 Sequential valve logic
圖3為西門子DEH的順序閥邏輯。當汽機主控PID計算的流量指令(YRO),經過順序閥函數進行線性變換后,生成閥門流量指令,送至閥門開度回路,控制汽機調門。其中,FD1OB參數設置的是閥門開度的偏置,在順序閥控制中決定了閥門的重疊度。FD1OE參數設置的是閥門的開啟速度。目前,國內的西門子機組一般采用全周進汽方式進行控制,故不存在順序閥的運行方式。因此,FD1OB參數一般設置為0。同時,在設計時考慮高負荷段采用補氣閥控制機組負荷,故FD1OE參數被設為0.8。這意味著當機組的流量指令超過80%時,汽機調門就將全開,采用補氣閥方式進行控制。而在實際應用過程中,由于機組振動等方面的原因,幾乎沒有機組使用補氣閥進行功率調節,補氣閥的閥限也被設為-5%,即補氣閥在收到指令后也不開啟。但DEH側的其他參數卻未隨機組運行方式的改變而進行調整,FD1OE參數依然保持0.8。這使得汽機調門在全開后出現控制死區,調門無法迅速關閉響應負荷需求,具體現象如圖3所示。
圖4為某660MW機組的負荷變動試驗曲線。從圖中可以看到,在負荷變動開始前,由于汽壓偏低,調門為控制負荷處于全開狀態。當負荷變動開始后,隨著負荷指令的下降和煤量的減少,實際負荷雖然也隨之下降,但下降速度慢于指令下降速度,實際負荷高于負荷指令。同時,隨著煤量的減少,主汽壓力迅速下降,且低于壓力設定值。在該工況下,汽機的調門卻始終保持全開,明顯不符合機組的控制要求。造成該情況的原因就是調門順序閥參數的不合理。
對此,建議在不使用補氣閥時將FD1OE參數設置為1,或限制YRO流量指令上限于0.8,以消除調門全開后的調節死區情況。同時,對汽機主控的PID參數進行調整,保證調節過程中的調節的速率滿足要求。
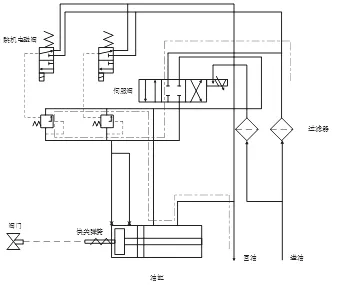
圖5 上汽-西門子機組調門EH調節原理圖[3]Fig.5 SAIC-Siemens Unit Tone EH adjustment schematic diagram[3]
2 EH油系統優化
上汽-西門子機組的EH調節系統的油管路設計如圖5所示。每個閥門的調節系統主要由2個跳機電磁閥和1個伺服閥組成。當機組正常運行時,EH油分2路進入調節系統。1路EH油流向跳機電磁閥,此時跳機電磁閥處于常帶電狀態,建立正常EH油壓。另1路EH油進入伺服閥,伺服閥根據DEH發出的指令對進入調門油缸的油路進行控制,通過對油缸進行充油和放油,實現對調門開度的控制。當跳機條件滿足時,任意1個跳機電磁閥失電,將使得進油與回油管路接通,油路中的EH油通過跳機電磁閥和回油管路泄去,調門在彈簧力的作用下關閉,達到遮斷汽輪機的目的[2]。
在近幾年的運行過程中,采用西門子技術的機組曾多次發生在進行閥門松動試驗(ATT)時,由于EH油壓力低,導致機組跳閘的事故。ATT試驗目的是在線檢驗各汽門能否正常關閉、閥門是否卡澀、跳閘電磁閥是否能夠正常動作,以確保機組跳閘或停機工況下能夠安全遮斷。跳機事故一般發生在進行主汽門或調門松動試驗時,由于跳機電磁閥卡澀,導致電磁閥在得電后進油與回油管路沒有正常隔離,伺服閥在試圖開啟閥門時,EH油直接通至回油油路,引起EH油大量內泄,從而造成了EH油壓力快速下降到機組跳閘值,引起機組跳閘。油通路如圖5中紅色虛線所示。
造成該情況的原因主要如下:
1)上汽-西門子機組在控制油路設計上與其他類型的機組不同。其他類型的機組是跳閘電磁閥控制安全油,通過安全油來控制閥門的壓力油;而上汽西門子機組直接由每個門的跳閘電磁閥控制壓力油泄、通,其沒有安全油的說法。
2)目前異常都是發生在調門試驗時。究其原因是調門的進油管內縮通徑大,導致異常時的泄油量大。經與廠家確認調門的進油管內縮通徑近乎是主門的8倍。
3)控制邏輯沒有設計相應的故障判斷和邏輯閉鎖,導致異常情況下,回油路仍然接通壓力油,直接導致EH油泄漏。
由以上分析可知,調門活動性試驗中電磁閥的卡澀異常和油管路設計的不完善是造成機組在試驗過程中跳閘的原因。對此,可從試驗流程和邏輯設計兩方面進行優化。
由于正常工況下調門處于不斷調節過程中,調門的活動性可實時監控,調門活動性試驗的目的主要是驗證跳閘回路的可靠性。因此,建議調門的活動試驗可在機組啟、停過程完成。若需要在線對調門的電磁閥跳閘回路進行驗證,應避免用順控進行試驗,而采用步進方式進行ATT試驗,并且實驗過程中加強現場側的監控,以便在每步操作后對閥門和機組的狀態進行確認,確認機組運行正常后才可進行下一步,以保證試驗過程中機組的安全。
在邏輯中,建議增加ATT試驗過程中,指令大于反饋時將伺服閥指令清0的保護邏輯,防止調門跳閘電磁閥卡澀、回路故障而調閥指令不為0,從而導致控制油壓降低。具體邏輯如下:當ATT試驗時,若①指令和反饋偏差大于6.8%,且閥位反饋小于5%;②兩個跳閘電磁閥指令未動作;③EH油壓小于13MPa。以上3個條件相與,即表征跳閘電磁閥可能發生卡澀故障,EH油發生大量內漏。此時,邏輯須將該閥門的伺服閥指令清為0,防止控制油壓力的進一步下降。
3 結束語
隨著近幾年采用上汽-西門子技術機組數量的增加,其DEH系統也暴露出了一些問題,對機組運行的安全性和經濟性造成了影響。本文在對DEH控制原理和問題成因分析的基礎上,提出了一些具有針對性的改進意見。文中提到的部分問題在上汽-西門子技術的DEH中有一定的共性,通過改進這些不足能夠在一定程度上提高機組運行的經濟性和可靠性。
此外,有許多機組的DEH系統未采用西門子原廠的控制系統,而采用了第三方的系統或DCS一體化的技術,對控制邏輯進行轉換,實現相應的功能。由于控制系統在結構、算法模塊、運算方式和機理上的差異,部分功能的實現與原廠系統還存在差距,甚至可能造成不利于機組的安全運行的隱患。因此,還需要對DEH邏輯進行充分地分析和研究以消除這些隱患。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27