一種改進的加速度阻尼半主動控制策略研究*
2019-06-01 08:35:18郭孔輝
汽車工程 2019年5期
郭孔輝,王 楊
(吉林大學,汽車仿真與控制國家重點實驗室,長春 130022)
前言
獨立懸架可分為麥弗遜、雙橫臂、多連桿等多種形式。彈性元件起承載作用,主要分為鋼板彈簧、扭桿彈簧、螺旋彈簧和空氣彈簧等。阻尼元件起減振作用,包括被動減振器和阻尼可調減振器,其中阻尼可調減振器包括電磁閥控阻尼可調減振器和電/磁流變液阻尼可調減振器等。根據阻尼或剛度調整范圍和功耗的考慮,懸架也可分為阻尼自適應懸架、半主動懸架、慢主動懸架和全主動懸架等[1]。
綜合考慮能耗、控制帶寬和系統的穩定性等因素,半主動懸架能夠在性能和成本等方面達到最好的折中。針對半主動懸架控制算法的研究受到國內外學者的廣泛關注[2],也提出了諸多控制算法,諸如基于參考模型的滑模控制[3-5],魯棒控制[6-7]和最優控制[8-10]等。在算法實時性、簡便性和工程實現等方面,其中以Karnopp等最早提出天棚控制策略(skyhook control,SH)最為著名[11]。目前天棚控制是研究和工程應用最廣泛的半主動控制策略之一。Sammier等提出了改進的線性天棚控制,能夠根據車身振動速度線性調節阻尼范圍[12]。Savaresi等提出了加速度阻尼控制(acceleration driven damper,ADD)[13],并利用最優控制理論證明了其有效性。Morselli等利用端口哈密頓方法提出了PDD(power driven damper control)控制方法[14]。
Savaresi等對比分析了開關型的SH和ADD的優缺點[15],即SH在低頻段(車身振動偏頻附近)效果明顯,而在高頻段(車身振動偏頻以上)效果不明顯甚至惡化;ADD的控制特性是在低頻段控制效果不明顯,但在高頻段卻能夠很好地抑制振動,控制效果較好。基于此Savaresi等提出了Mixed SH-ADD算法,能夠結合SH和ADD控制優點,實現全頻域內降低車輛振動加速度,雖然Savaresi指出SH和ADD在控制性能中的優缺點,但是并沒有說明其原因,Mixed SH-ADD算法具有較好的控制效果,但是其提出的頻率選擇器由于自身的特性不能夠在分頻點附近實現完全分頻。Liu等提出了Mixed SH-PDD控制算法,同樣也利用一種分頻函數,在低頻時采用SH控制,高頻時采用PDD控制,這樣該算法不僅在整個激勵頻域內降低振動加速度,同時減低振顫,并利用能量流進行算法分析[16]。
針對諸如油氣懸架等剛度和阻尼能夠同時調節的系統,Spelta等提出結合Mix SH-ADD和懸架動行程門限邏輯控制的算法,能夠更進一步提高乘坐舒適性[17-18]。Dande在論文中闡述了SH和ADD控制在相頻特性的差別,提出一種基于規則的控制算法[19]。
基于以上原因,本文中首先深入分析SH和ADD的控制特性,并從相頻的角度對其進行理論分析,然后提出了改進的ADD控制策略,能夠實現在全頻域內的降低車輛的振動加速度,該改進的ADD是面向乘坐舒適性的半主動控制策略。
1 SH和ADD分析
圖1為2自由度的車輛振動模型,下面對其進行動力學建模[1]。
建立動力學方程:

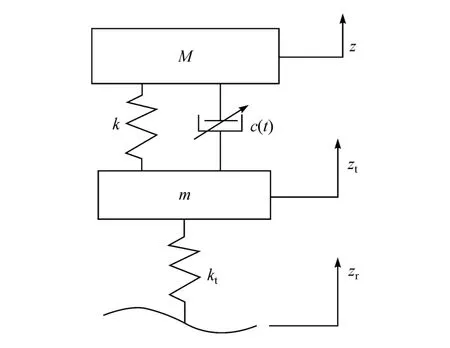
圖1 2自由度車輛振動模型
式中:M為簧上質量;m為簧下質量;z為簧上質量垂向位移;zt為簧下質量垂向位移;zr為路面激勵;k為懸架剛度;c為懸架阻尼系數;kt為輪胎剛度。
1.1 SH控制特性分析
在SH控制中,假設存在一個阻尼器連接在參考位置(天空)和車身上,以抑制由于路面不平度激勵引起的車身振動,對于開關型的SH控制,有

為分析SH的控制邏輯的
相頻特性,車身速度與懸架運動相對速度的傳遞函數關系為

所以相頻特性如圖2所示。通過圖2可知:在低頻時,車身速度與懸架運動相對速度相位相同,沒有相位差;在高頻時,車身速度與懸架相對速度有90°的相位差。這表明:在低頻區,SH控制邏輯能夠按照控制邏輯執行控制算法,并抑制車輛的振動加速度;當路面的激勵為高頻激勵時,則導致SH控制邏輯在執行時,不能完全按照控制邏輯執行。
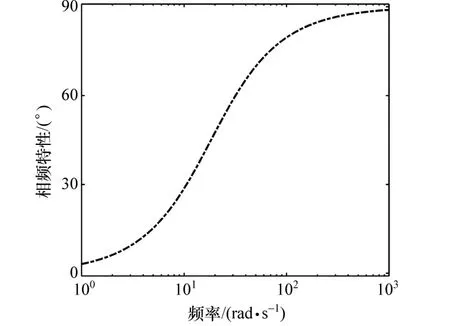
圖2 SH控制邏輯相頻特性
1.2 ADD控制特性分析
在汽車振動中,ADD控制以抑制車身加速度z··為目標,對于開關型的ADD控制,則有

為分析ADD控制邏輯的相頻特性,車身加速度與懸架運動相對速度的傳遞函數關系為

所以相頻特性如圖3所示。通過圖3可知:在低頻時,車身加速度與懸架運動相對速度存在90°的相位差;在高頻時,車身加速度與懸架運動相對速度有180°的相位差。這表明:在低頻區,ADD控制不能完全按照控制邏輯執行;當路面的激勵為高頻激勵時,在執行ADD控制邏輯時,恰好是以抑制慣性力為目標的控制邏輯,能夠很好地抑制此頻段的振動加速度。
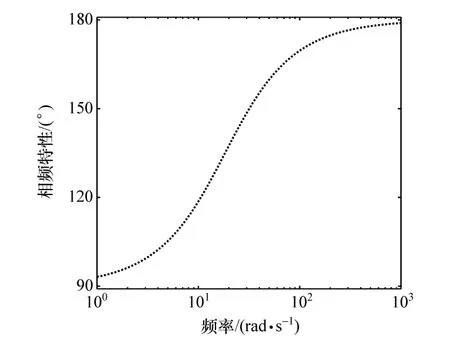
圖3 ADD控制邏輯相頻特性
通過對SH和ADD控制的相頻特性分析,根據SH和ADD在不同頻率段的控制特性,提出一種能夠結合SH和ADD優點的改進ADD控制,實現全頻域內的降低車輛振動加速度的目的。
2 改進 ADD控制[20]
通過對SH和ADD的控制特性分析,設計一個控制系統W,以車身加速度z··信號為控制系統輸入,在低頻時該控制系統為一個積分環節,能夠將加速度信號z··變成速度信號z·;在高頻時該控制系統近似為比例系數是1的比例環節,輸出為加速度信號z··,最后將控制系統W輸出的信號定義為S,如圖4所示。
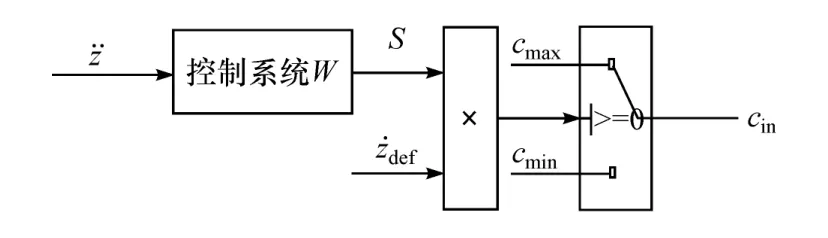
圖4 控制算法簡圖
改進ADD控制可以表示為

式(7)的幅值和相位角分別為
式(8)和式(9)的Bode圖如圖5所示。
通過圖5可知,在低頻時,控制系統W能夠在低頻激勵時給控制策略提供-90°的相角補償,這可以改進原有ADD控制策略在低頻時的控制特性的不足,因此將該方法命名為改進的ADD控制。
改進的ADD控制策略中判斷邏輯的傳遞函數為
利用上式可以繪制相頻特性,見圖6。
通過圖6可見:在低頻時,提出的改進ADD控制策略具有與SH控制相近的相頻特性;在高頻時,改進的ADD控制具有與ADD控制一致的相頻特性。也是基于此原因,提出的改進ADD控制能夠結合SH和ADD控制的優點,具有全頻域內提高乘坐舒適性的特性。
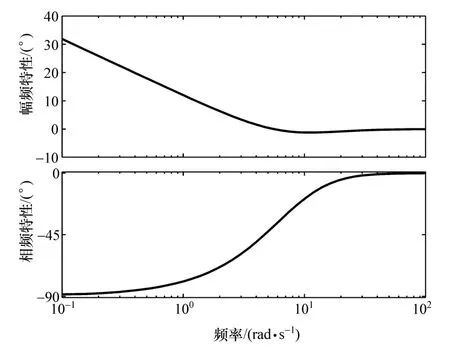
圖5 控制系統W幅頻與相頻特性
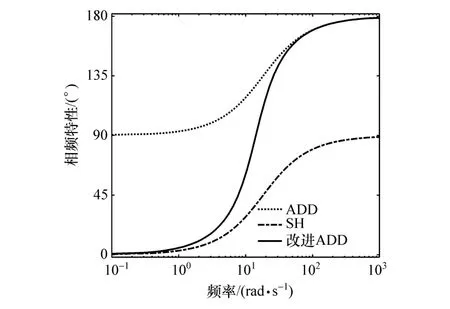
圖6 3種算法控制邏輯的相頻特性
3 仿真分析
3.1 減振器響應時間模型
SH,ADD和改進的ADD控制策略為開關型控制,在阻尼力切換時存在“振顫”,而在實際的應用中,減振器的阻尼力響應時間會抑制“振顫”。用1階慣性系統描述阻尼力響應特性:

式中β為減振器的響應帶寬。
3.2 仿真分析
為驗證對SH和ADD控制特性分析的正確性和改進ADD控制算法的有效性,利用1/4車輛模型進行仿真驗證,模型參數如表1所示。
下面分別以不同頻率的正弦波(1.25,4和12 Hz)作為激勵,進行仿真分析。
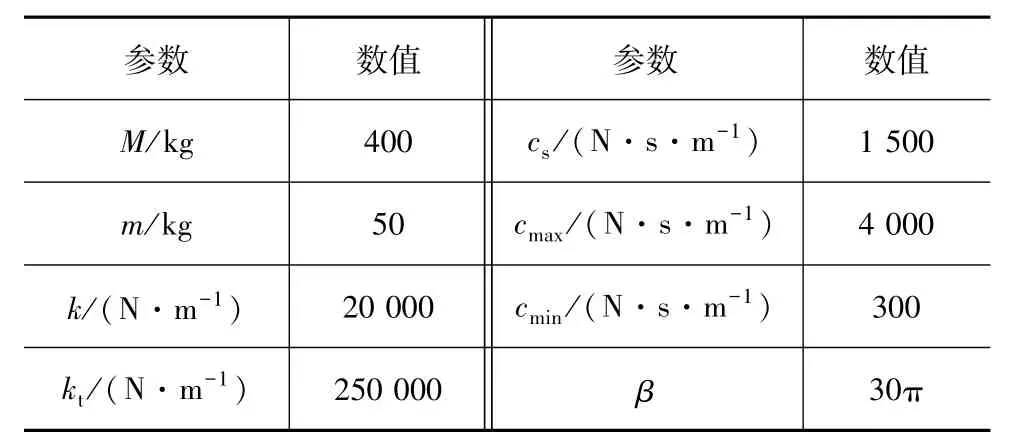
表1 車輛模型參數
圖7為分別以1.25,4和12 Hz的正弦波作為激勵信號,驗證提出的改進ADD算法在不同頻率內的控制效果。圖8為以正弦波掃頻信號作為激勵獲得的幅頻特性。通過圖7和圖8看出,在低頻激勵時,改進的ADD控制與SH控制特性一致,在高頻時,改進的ADD控制與ADD控制的特性一致,所以本文中提出的改進ADD控制能夠結合SH和ADD控制的優點,無論在低頻區還是高頻區控制效果都很好。
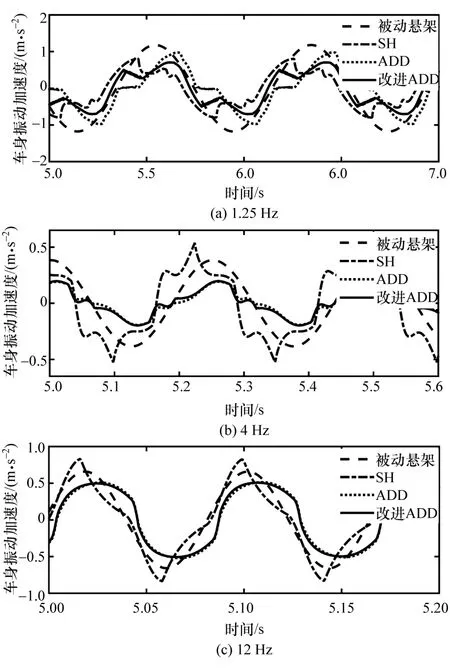
圖7 3種控制策略在正弦波激勵下的時域響應
4 試驗驗證
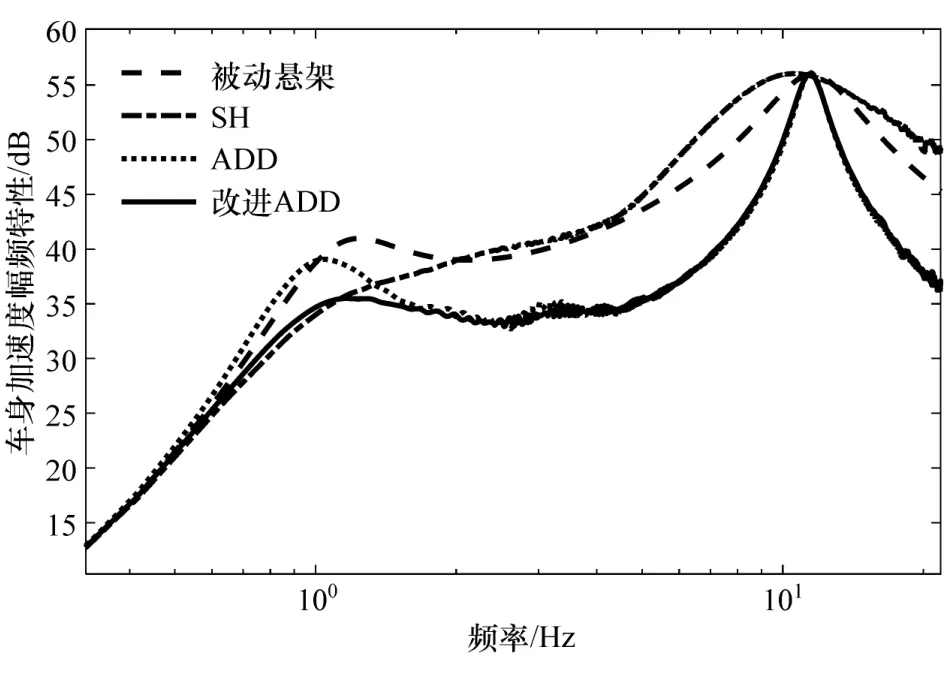
圖8 正弦波掃頻激勵下的頻域特性
4.1 可控減振器實物在環試驗臺搭建
為驗證提出的改進ADD半主動控制算法,搭建可控減振器硬件在環試驗臺。基本原理為利用xPC Target實時系統,建立1/4車輛動力學模型,將車輛模型的懸架相對位移信息通過xPC Target經過標定處理后轉換成控制信號給直線電機控制器,同時xPC Target的控制板卡采集力傳感器信號,經過標定處理后轉換成減振器阻尼力,返回給實時車輛動力學模型,由此構成硬件在環回路。同時通過xPC Target的控制板卡上的模擬信號輸出引腳輸出實時車輛的車身加速度信號和懸架運動相對速度信號。利用MotoHawk快速原型開發工具,將半主動控制算法(如SH)燒寫到MotoHawk控制器中。其中,控制器輸入是車身加速度信號和懸架相對速度信號,控制器輸出是PWM控制信號,將PWM信號接到可控減振器的接線端子上,具體如圖9所示。實物如圖10所示。
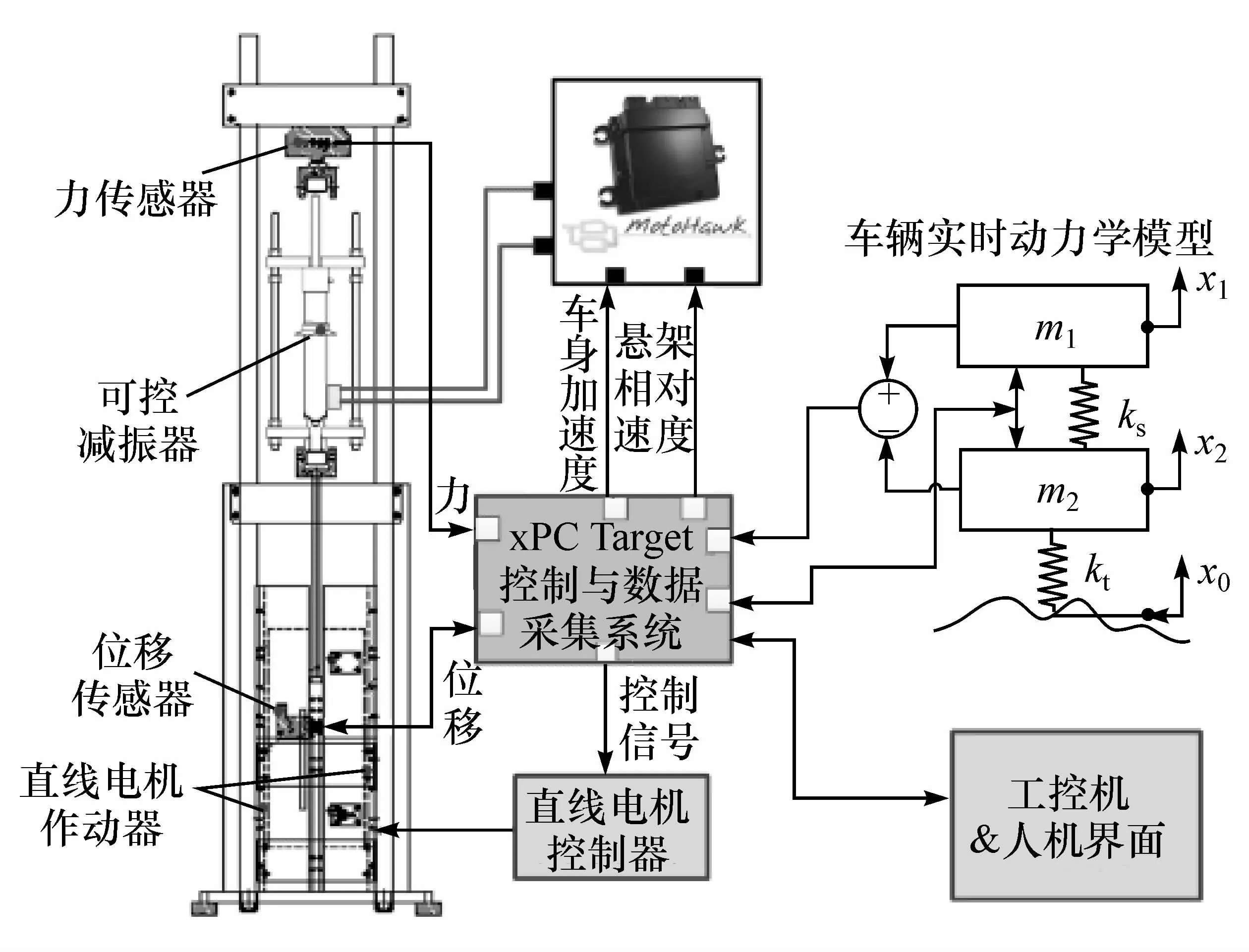
圖9 減振器硬件在環原理圖
4.2 試驗結果分析

圖10 減振器硬件在環實物圖
為驗證半主動控制算法,采用車速為72 km/h的C級隨機路面作為激勵,試驗時間為120 s,由于采用磁流變液減振器,被動懸架分別以最大阻尼和最小阻尼作為參考。圖11和圖12分別為在不同情況下車身振動加速度的時域圖和頻域圖。
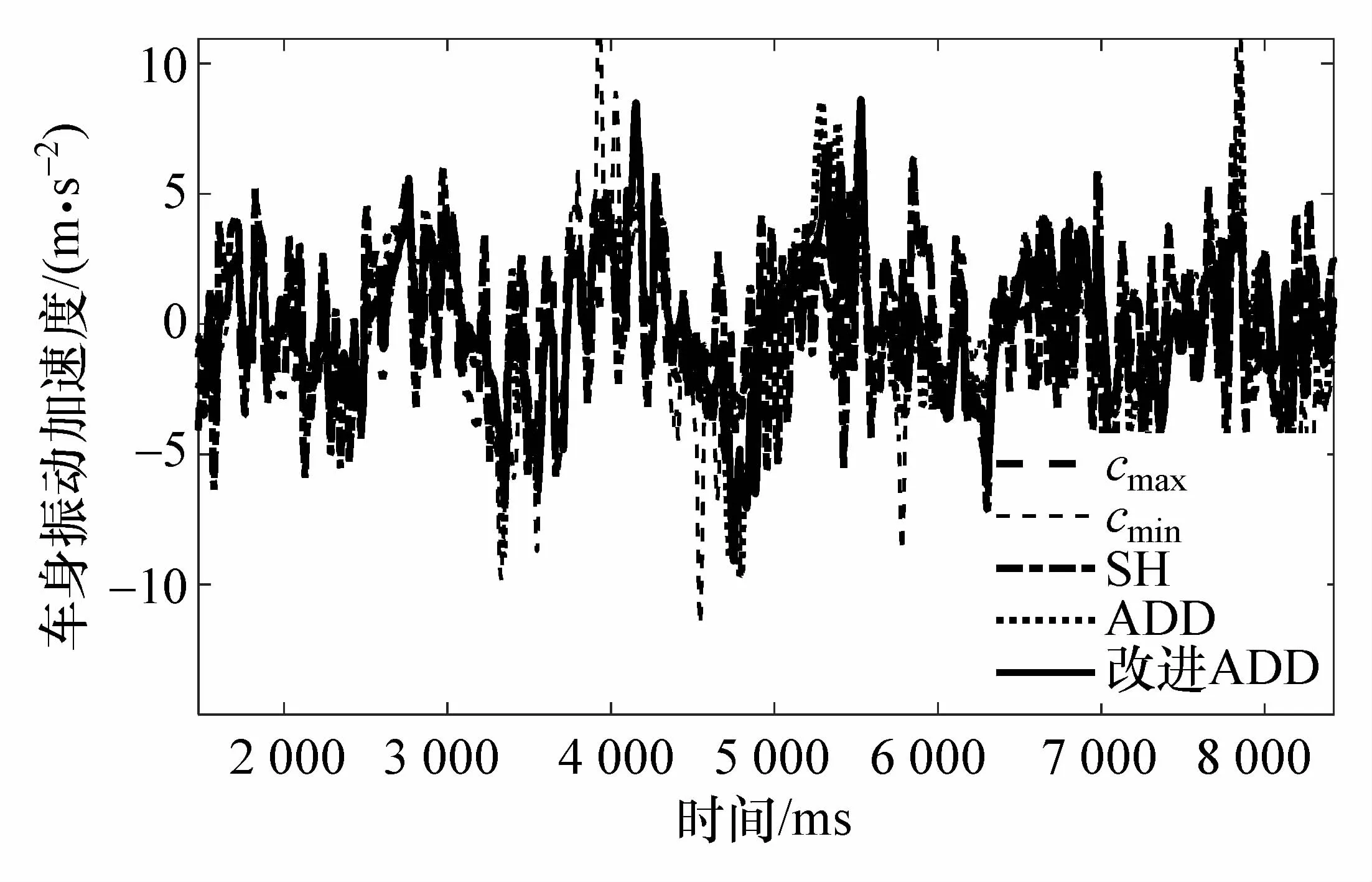
圖11 隨機路面下的時域圖
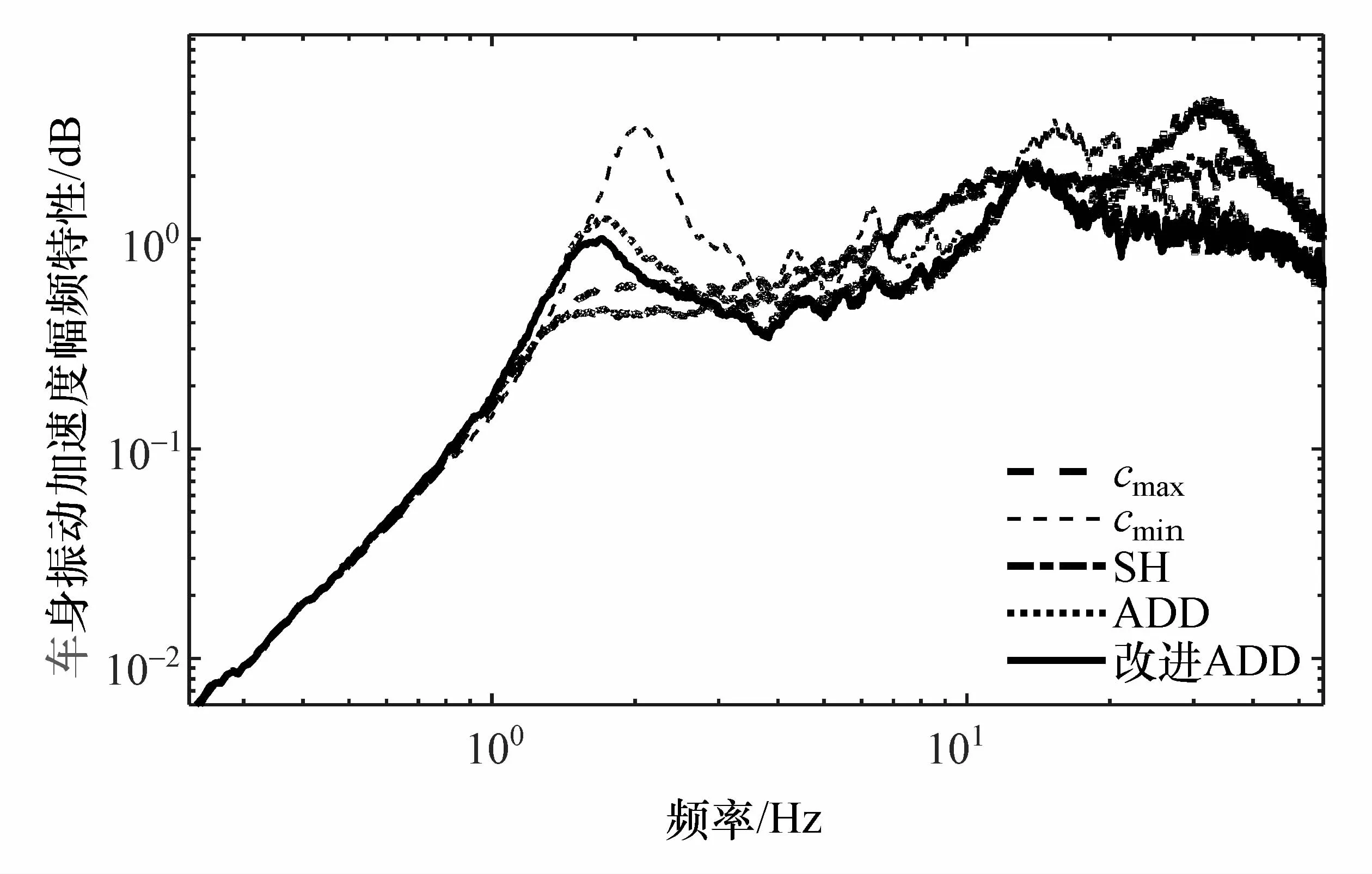
圖12 隨機路面下的頻域圖
表2為不同控制策略下的加速度均方根值對比。可以看出,與最大/最小阻尼系數的被動懸架和SH及ADD控制相比,改進的ADD控制能夠明顯抑制車輛的振動加速度。
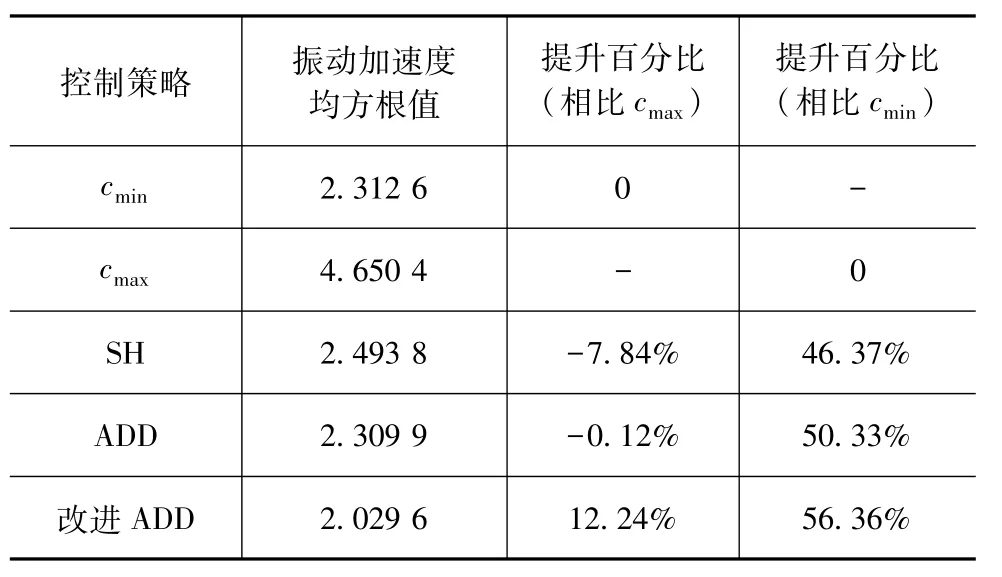
表2 不同控制策略下的加速度均方根值對比
5 結論
針對面向乘坐舒適性的半主動懸架控制策略,首先從相頻的角度分析了開關型的SH控制和ADD控制的不足,從而提出了一種改進的ADD控制策略,能夠在整個激勵頻域內都有較好的控制效果,并從相頻角度給予證明。然后通過仿真,利用3種不同頻率的正弦波信號作為激勵分析不同頻率的控制效果,同時利用正弦波掃頻信號作為輸入,驗證了全頻域內的控制效果。仿真表明所提出改進的ADD控制能夠在整個激勵頻率范圍內降低車輛的振動加速度。最后搭建一個可控減振器的硬件在環試驗臺,驗證了控制算法的有效性,該算法實時性好,易于工程實現。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
通信電源技術(2016年1期)2016-04-16 04:57:26
