基于藍牙技術的城市軌道交通室內定位導航及應用
2019-06-01 03:22:08張立東萬明俊
城市軌道交通研究 2019年5期
張立東 孫 煜 萬明俊
(1. 上海申通地鐵集團有限公司技術中心,201103,上海; 2. 上海詢諾通信科技發展有限公司,200063,上海//第一作者,高級工程師)
目前,城市軌道交通乘客對地下空間的導航需求日益增長。然而,地下空間環境復雜,傳統的室外定位技術如GPS(全球定位系統)、北斗定位、GPRS/CDMA(通用分組無線服務/碼分多址通信)定位等在地下車站難以適用,導致地下空間的定位導航成為城市定位導航服務的盲區。
為推動上海城市公共交通現代化進程,滿足人們對城市軌道交通地下空間的定位導航服務,本文以信息技術為支撐,借助物聯網,選擇室內環境復雜的城市軌道交通車站作為試點,部署藍牙設備,建設基于物聯網的城市軌道交通室內定位系統[1],從而為乘客出行提供便利的乘坐體驗,提升運營服務質量。
1 城市軌道交通室內定位方案
1.1 室內定位技術
目前,成熟的室內定位導航技術有Wi-Fi定位、藍牙定位、地磁定位和超寬帶定位等。本文從定位精度、使用場景、工程量等方面對這四種定位技術予以分析。
(1) Wi-Fi定位技術的覆蓋范圍較大,但對于城市軌道交通環境而言,Wi-Fi定位的每一個AP(無線接入點)都需要獨立供電,工程量較大,且在類似車站的狹小空間里定位精度不夠理想。
(2) 藍牙定位技術目前較為廣泛地應用于移動終端,采用無源的低功耗藍牙信標,部署成本較低,效率高,適用于各類地下環境。其在商用領域較為成熟,應用于大型商場、停車場等室內場景[2]。
(3) 地磁定位技術是一種新興技術,通過捕捉“室內地磁場”的規律來實現定位。通過手機端普遍集成的地磁傳感器收集室內的磁場數據,辨認室內環境里不同位置的磁場信號強度差異,從而匹配自己在空間中的相對位置。然而,該技術僅適用于相對電磁環境固定的室內環境。對于城市軌道交通車站,列車的不斷進出會造成室內地磁場數據的變化。
(4) 超寬帶定位系統包括UWB(超寬帶)接收器、參考UWB標簽及主動UWB標簽。定位過程中,由UWB接收器接收標簽發射的UWB信號,然后過濾電磁波傳輸過程中的各種噪聲干擾,得到有效信息的信號,再通過中央處理單元進行測距定位計算分析。該技術需要極其精確的定位需求,因此應用于工業環境居多。
結合城市軌道交通的空間環境以及所面向的用戶群體,從定位精度的需求、經濟性、工程量等方面分析,采用低功耗藍牙定位的技術更符合城市軌道交通室內定位導航應用的目標。四種定位技術的比選如表1所示。
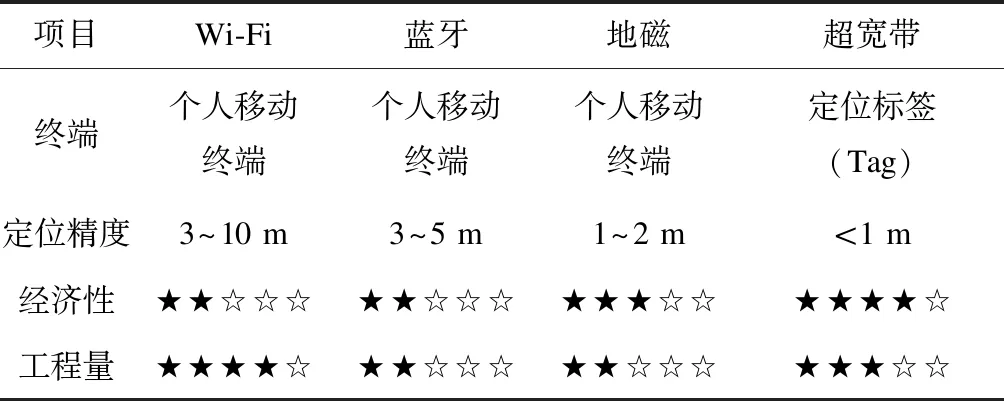
表1 四種定位技術比選
1.2 基于藍牙的室內定位
基于藍牙的室內定位原理是:應用RSSI(接收的信號強度指示)的室內定位技術計算當前所在位置,再通過卡爾曼濾波過濾,利用三點定位計算獲取當前精確位置,在導航過程中通過慣性導航技術確保導航順暢。
1.2.1 基于接近度分類的RSSI指紋定位
基于接近度分類的RSSI指紋定位技術[3]是一種應用范圍廣泛的室內定位方法,是非參數化的。非參數化定位的原理是為環境生成坐標信息。因此,基于RSSI的室內定位技術的定位精度相對較高。
基于RSSI的室內定位技術操作流程一般分為:① 將室內環境劃分為X×Y的網格狀;② 測量節點的信號強度,并做記錄;③ 以接近度作為指紋庫分類特征(如圖1所示),分為接近(1 m以內)、附近(1~5 m)、遠(超過5 m)。
1.2.2 基于藍牙的三點定位算法
由于藍牙的低功耗特性,藍牙iBeacon的理想定位工作距離一般在8 m以內。根據基于藍牙的三點定位算法原理,當目標位置被3個以上iBeacon覆蓋,可以達到最好的定位效果。所以,基本的原則就是利用iBeacon將空間按適當距離分割成小空間,如圖2所示。
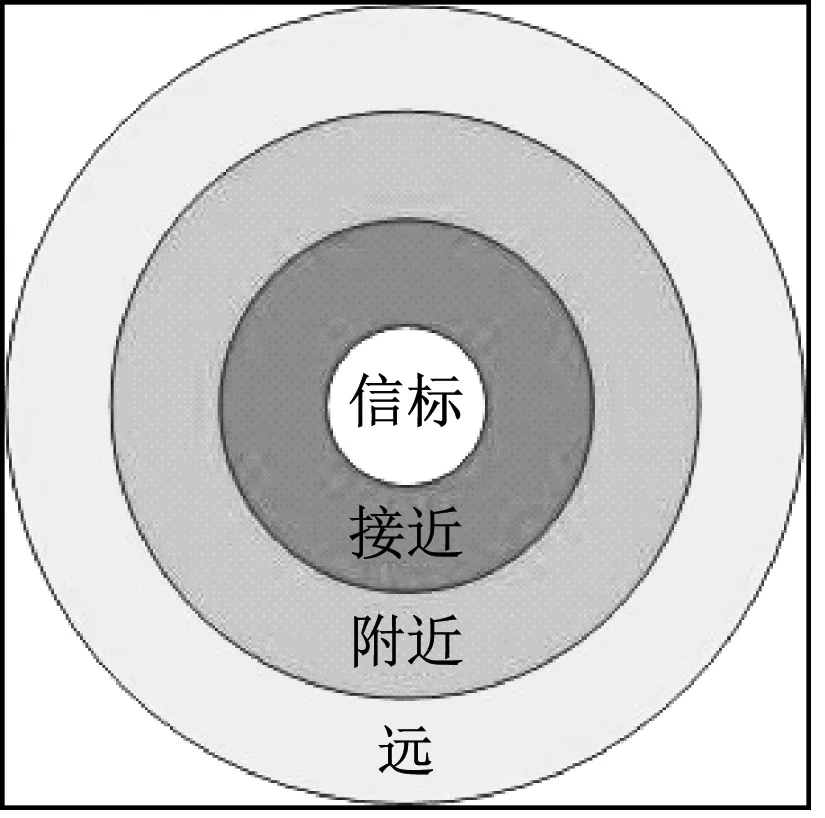
圖1 RSSI指紋定位技術的接近度分類
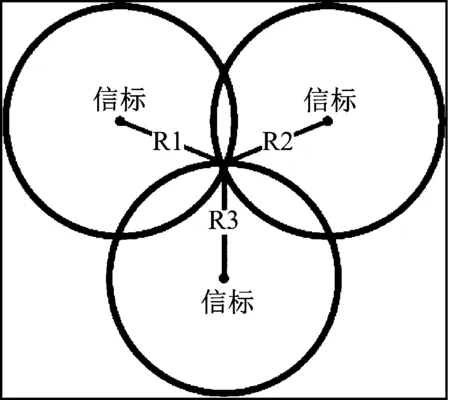
a) 三點定位原理
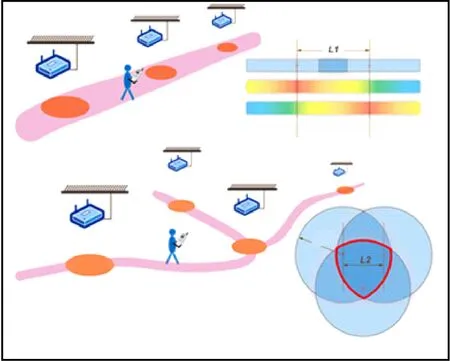
b) 室內定位場景示意
1.2.3 卡爾曼濾波
在導航過程中,需要實時變動表示當前位置的標識符,如果根據人員行動后獲取新的位置信息進行導航界面調整,則會因為時刻都在計算當前位置而給系統帶來大量計算壓力,顯示中也會有卡頓、不流暢的感覺。為了避免這種問題,在導航過程中,確認精準的位置信息后,采用卡爾曼濾波處理,在導航界面中勻速移動表示當前位置的標識符[4]。
在定位導航系統中,獲取位置信息的時間間隔為1 s。卡爾曼濾波通過這1 s的位置信息和上1 s的預測位置信息,以及這兩個位置的信息偏差,計算最有可能的誤差,預測下1 s的位置信息;在此刻之后的1 s內,導航系統將在當前位置和下1 s的預測位置之間勻速移動表示當前位置的標識符。
1.2.4 慣性導航
慣性導航系統(見圖3)是利用智能終端里的陀螺儀、三軸加速度傳感器及電子羅盤(磁力計)等獲取行進過程中的各類信息,然后根據獲取的運動軌跡和速度,配合陀螺儀和三軸加速度傳感器測量移動的角度和加速度,計算下一刻的位置,并通過電子地圖顯示。
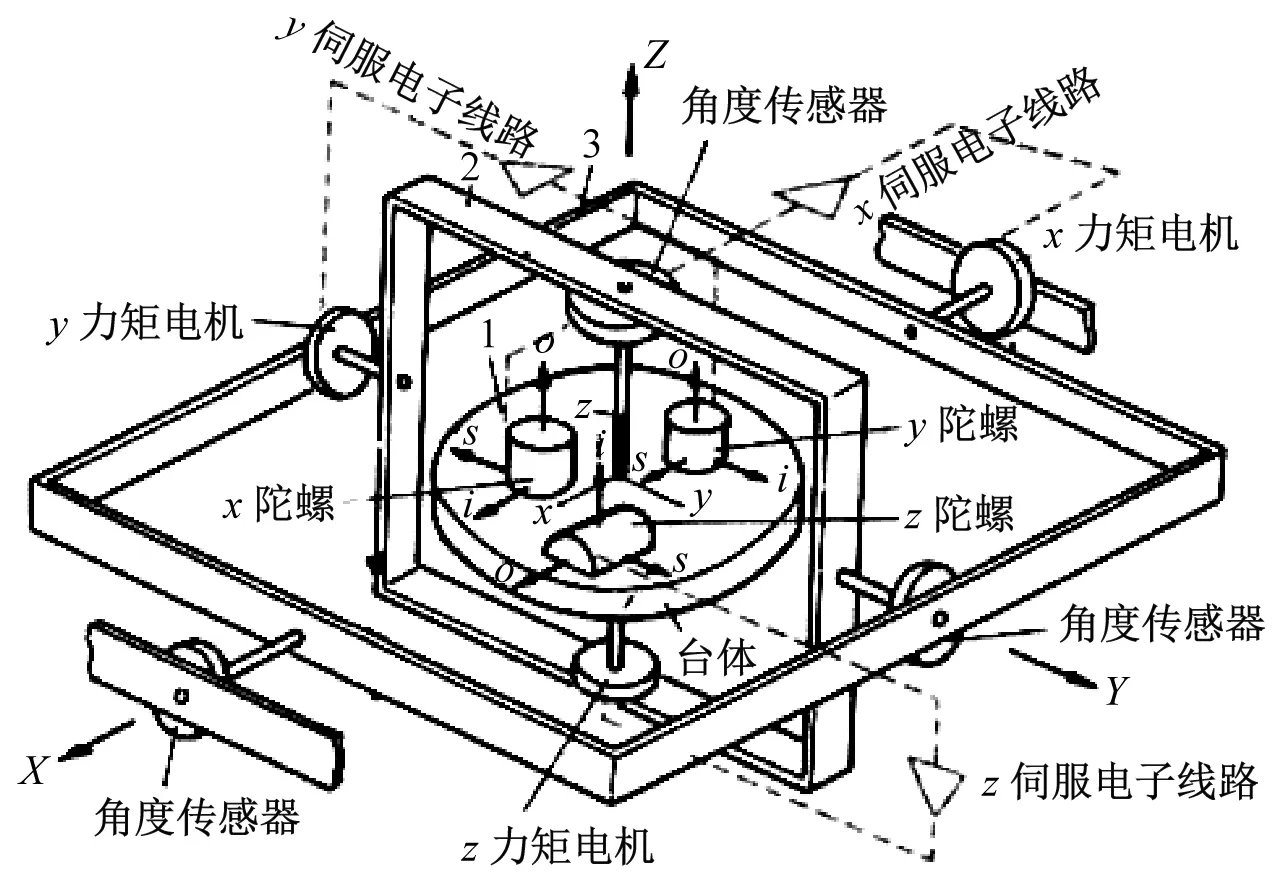
圖3 慣性導航系統
慣性導航在定位導航移動應用的過程中起到輔助作用,避免了在信標的盲區或者信號干擾強的地方出現的獲取當前位置延遲或者位置出現偏差的情況[5]。
1.3 基于藍牙的定位系統
一般室內環境下,iBeacon間距控制在5~8 m,對整個空間進行網格狀分割實現全覆蓋;特殊空曠地區,選擇按照邊沿施工圖向內覆蓋。由于城市軌道交通地下車站內布局相對復雜,立柱較多,需根據實際情況對每一個車站的站廳、站臺及管理區域等進行踏勘,并對特殊區域予以部署。
1.3.1 站廳層藍牙部署
站廳層的藍牙一般遵循基本規則在空曠區域實施部署。對于重要節點,如進出站閘機處,可在閘機外及閘機內一側2~3 m處分別部署一個藍牙設備,用于站內站外的精確定位。一般車站站廳層的藍牙部署如圖4所示。
1.3.2 站臺層藍牙部署
同一天,附近阿林頓鎮上,27歲的郵遞員亞當·詹諾斯也向急救中心打來了求助電話,說自己十分痛苦。當急救人員趕到時,發現亞當躺在地板上,呼吸困難。雖然他們將他送到最近的醫院搶救,但為時已晚,醫生宣布亞當死于心臟病。
站臺層同站廳層相比結構更加簡單,可將兩側候車區視為走廊區域,樓梯之間的休息區視為空曠區域,其藍牙的部署遵照基本規則即可。一般車站站臺層的藍牙部署如圖5所示。
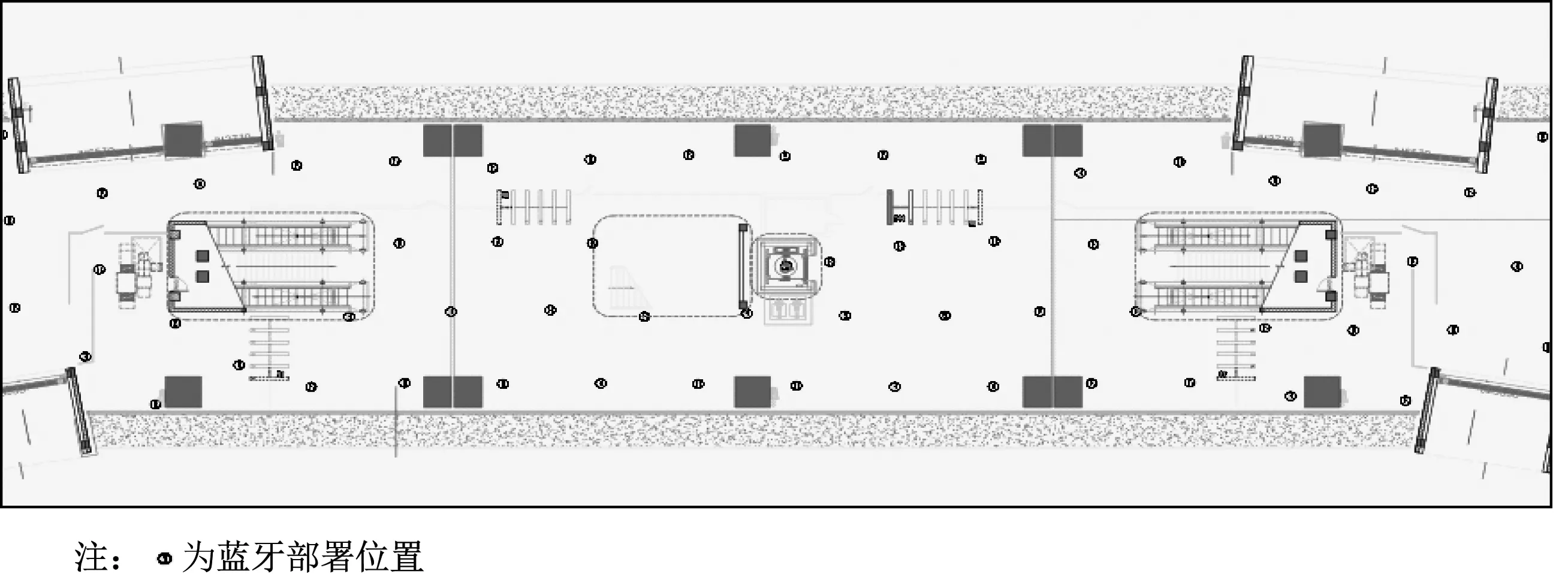
圖4 一般車站站廳區域藍牙部署

圖5 一般車站站臺區域藍牙部署
1.3.3 電梯處藍牙部署
對于單個電梯,在其轎廂門外靠一側1~2 m遠處安裝一個藍牙設備,在電梯內部安裝一個藍牙,有助于識別樓層切換的狀態;對于自動扶梯、樓梯等設施,需要在扶梯口、樓梯口旁安裝至少一個藍牙設備(如圖6所示)。
2 實施方法和結果分析
2.1 設備選型
選擇的藍牙設備的參數如表2所示。
2.2 圖紙核對
定位導航功能的呈現需要精準的地圖進行支撐,而制作精準的地圖則需要準確、完善的現場資料。因此,在部署定位設備之前需要勘探現場。勘探現場時,應詳細考察平面結構圖紙與現場情況有無差異,同時需對層高、遮蔽、吊頂及行進方向等情況進行調研記錄,以形成一套完善的制圖資料。
2.3 藍牙點位布局
在已經制作好的地圖上,參考勘探現場拍攝的照片或施工圖紙,按照常規藍牙部署實施原則,進行藍牙點位布局設計,并對設計好的硬件點位進行編號。
a) 垂直電梯
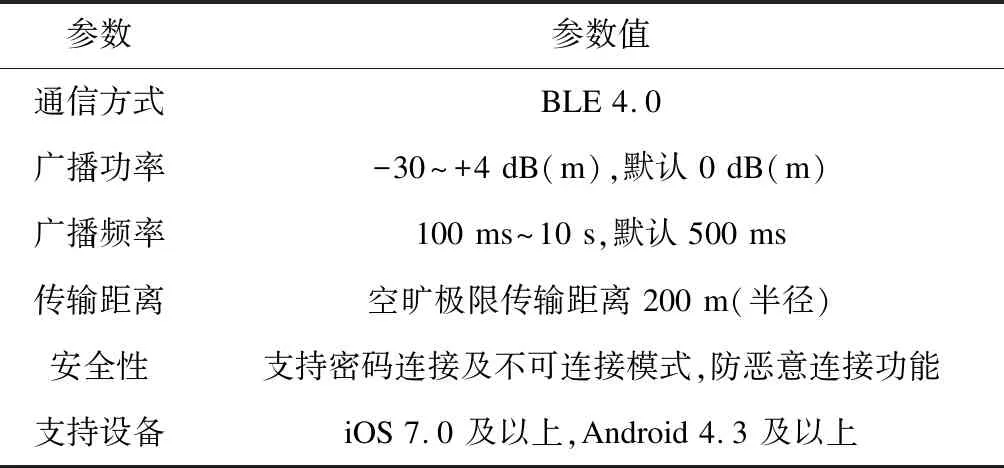
表2 試驗藍牙設備參數
因圖紙視角的局限性,無法完整獲取現場布局及裝修信息,故設計圖紙僅作為實施參考,在正式實施的過程中,可能因特殊情況進行點位的調整。
2.4 實施環境
根據藍牙信標的特點以及現場情況,可在地面或立柱或吊頂上安裝藍牙信標。
(1) 安裝在地面時,藍牙信號有干擾,需在地面打孔,安裝完畢后需對地面進行修繕,且后續維護保養較為麻煩。
(2) 安裝在立柱上時,藍牙信標暴露在外,可能會導致乘客誤拿,影響導航準確性。
(3) 部署在吊頂上時,藍牙信號正常覆蓋,部署過程難度一般,運維難度一般,且由于在隱蔽角落,不影響現有裝飾。
因此,較為可行的方案是將藍牙信標安裝在吊頂上。但城市軌道交通各車站布局不盡相同,部分車站情況復雜,存在特殊情況(如吊頂過高、封閉吊頂、柵格吊頂等),所以藍牙信標的安裝點可能會進行調整。
2.4.1 吊頂過高
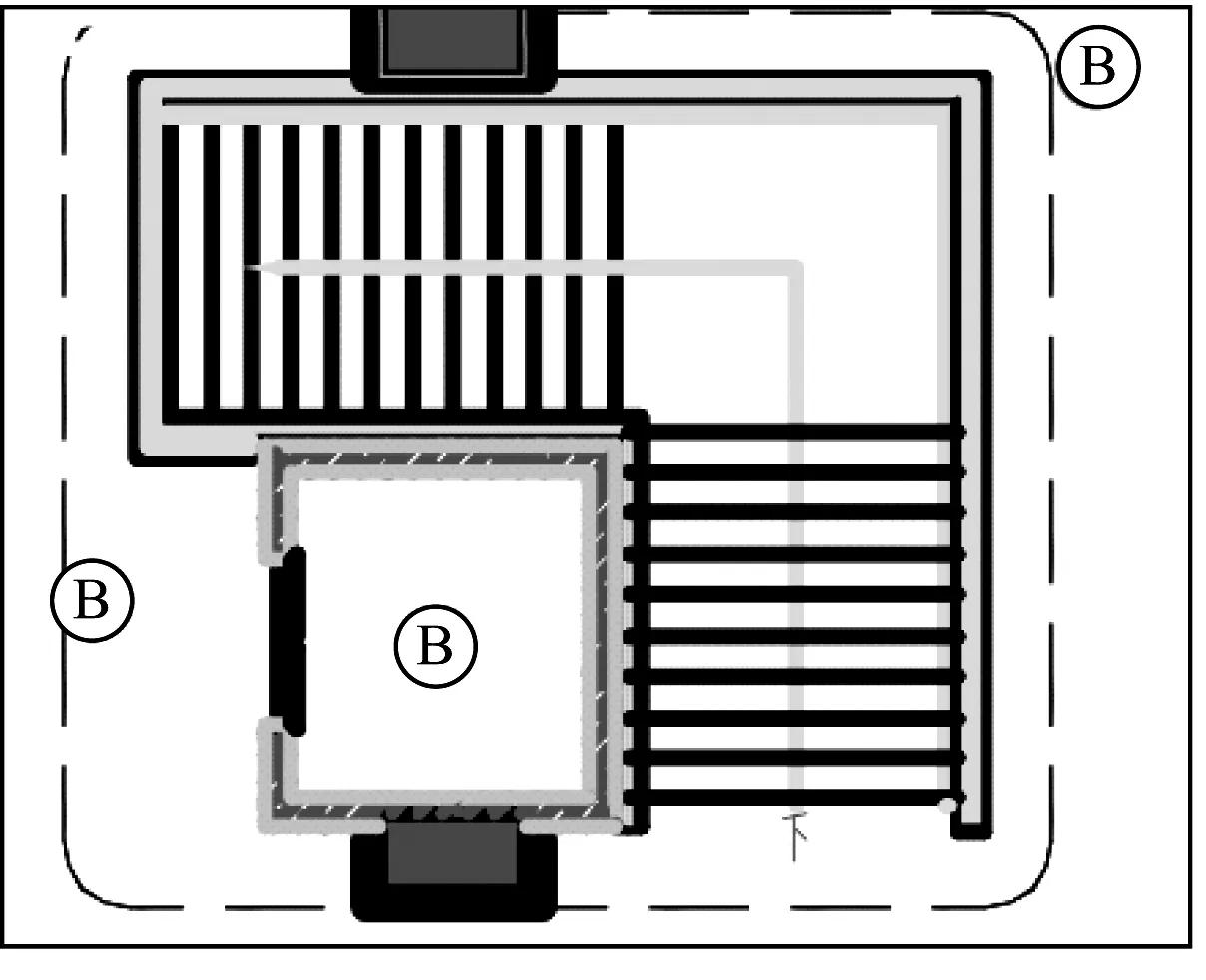
上海軌道交通人民廣場站站廳層為典型的吊頂過高情況,其站廳層三角區域周邊存在挑高層,層高在8 m左右(見圖7)。而藍牙覆蓋最佳距離推薦在8 m以內,因此,將藍牙信標部署在吊頂顯然不合適,施工難度也較大。對于此類局部出現大面積吊頂較高的情況,可根據現場實際情況,將藍牙信標固定在承重柱或周邊墻面高5 m處。

圖7 人民廣場大三角換乘區域
2.4.2 封閉吊頂
在藍牙信標部署過程中,部分車站存在封閉吊頂裝修風格。對于此類環境,可在吊頂下方通過3M強力膠加螺絲固定藍牙信標(見圖8),以保證設備的安全性與可靠性。

圖8 封閉吊頂部署
2.4.3 柵格吊頂
在一般的城市軌道交通車站中,有大量區域是柵格型吊頂,存在間隙。對于此類吊頂環境,可在柵格底部通過3M強力膠加塑料扎帶固定藍牙信標,如圖9所示。

圖9 柵格吊頂部署
2.5 實施過程中遇到的問題及解決方案
2.5.1 點位漂移
在現場測試中發現,當手持移動終端靜止不動時,系統顯示的當前位置圖標卻在地圖上跳動,即通常所說的信號漂移現象。由于藍牙信標的信號強度是周期性變化的,因此計算獲取的位置信息是有變化的,這導致了點位漂移。為此,在定位算法中增加了慣導優化定位算法,并對當前位置進行多次計算,判斷目標是否移動,解決了終端設備靜止而系統當前位置標識漂移的現象。
2.5.2 安卓機型適配
在實地測試過程中發現,不同的安卓機型在導航中效果有差異。經過分析,發現這種差異是因各安卓機型的陀螺儀傳感器等相關設備的參數不同而引起的。為此,對市場上主流的安卓機型做兼容性適配,以最大程度緩解該問題。
2.5.3 藍牙部署位置調整
在實地測試中發現,部分位置定位會出現諸如漂移、實時反應慢,以及在乘坐自動扶梯或走樓梯換層后地圖切換不及時等問題。這是由于藍牙信號被立柱等障礙物干擾而引起的。通過調整部分在立柱等障礙物附近的藍牙設備的部署位置,并在樓梯、電梯及自動扶梯附近增加藍牙設備,此問題即可解決。
2.5.4 精度調優
在實地測試過程中發現,定位精度比理論值要差。在真實環境中,手持移動終端移動時,會出現定位偏差嚴重的情況。通過研究,在定位算法中加入了卡爾曼濾波等優化算法,排除了無效點位的干擾,提高了定位精度。
2.5.5 穿墻
在現場測試導航過程中,故意貼墻(或隔離帶)行走,行進一段時間后脫離規劃路線,移動軌跡穿過障礙物,這時設備上標識當前位置的點位會出現在墻(隔離帶)的另一側,即穿墻現象。通過在系統中增加路徑吸附功能,解決了穿墻問題。
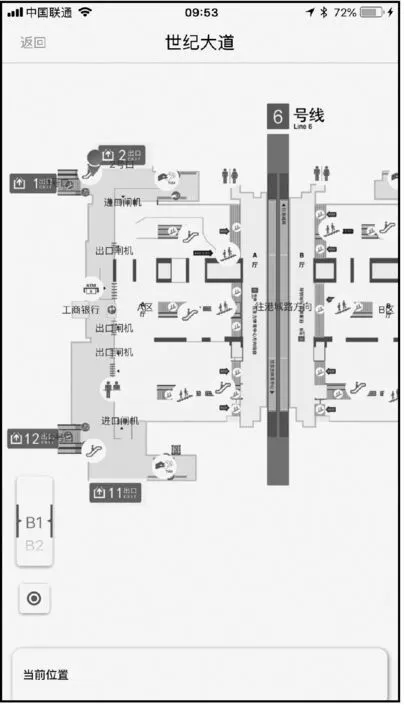
2.6 實施效果
根據本文的研究方案,結合現場試點進行應用開發。圖10所示為上海軌道交通世紀大道站室內導航效果圖。乘客進入車站區域后,打開應用,即可打開車站地圖,并顯示當前位置;選擇目的地(衛生間)進行導航(模擬在2號口進入車站后);根據系統提示選擇,進行導航模擬,查找目的地(衛生間)。
3 結 語
室內定位導航技術的出現完善了導航精準化。隨著藍牙技術日益成熟,一些大型企業推出了各自基于藍牙設備的室內定位解決方案。本文針對復雜的多線路車站室內導航需求,進行藍牙定位導航系統建設。經實際使用,該系統可實現精準定位、導航,滿足為乘客提供目的地指引的室內定位導航需求。