電動液壓助力轉向系統的節能優化研究
2019-06-07 07:22:54夏雨張涌吳海嘯姜朋昌
森林工程 2019年3期
夏雨 張涌 吳海嘯 姜朋昌

摘要:針對某型純電動商用汽車的EHPS,在傳統常流式EHPS基礎上提出一種新型的常壓式EHPS系統。這種系統在傳統常流式 EHPS 系統的基礎上加裝了蓄能器和電磁閥等結構,取代了電機和液壓泵的持續工作狀態,使系統既能滿足轉向助力的需求,又能減輕能量的耗損,實現系統的節能優化。根據系統性能對其關鍵部件進行合理的選型和計算;基于助力需求選擇合適的助力特性曲線形式,并在 MATLAB 曲線擬合工具箱中進行基于車速系數的助力特性的曲線擬合;根據助力特性確立系統控制的方法;在MATLAB/simulink 軟件中對常壓式EHPS進行建模,對系統的助力響應、控制性能和助力跟隨性進行仿真分析,并對能耗進行計算。仿真得到的結果表明,這種常壓式 EHPS 能夠達到轉向助力性和節能性的雙重要求。
關鍵詞:常壓式 EHPS;助力特性;建模與仿真
中圖分類號:U463.4文獻標識碼:A文章編號:1006-8023(2019)03-0093-07
Study on Energy Saving Optimization of Electric Hydraulic
Power Steering System
XIA Yu, ZHANG Yong*, WU Haixiao, JIANG Pengchang
(College of Automobile and Traffic Engineering, Nanjing Forestry University, Nanjing 210037)
Abstract:For EHPS of a pure electric commercial vehicle, a constant pressure type EHPS has been proposed based on the constant flow type EHPS. This system has been installed an accumulator and solenoid valve on the basis of the traditional constant flow type EHPS, which replaces the continuous working state of the motor and hydraulic pump. This system can not only meet the needs of steering power, but also reduce energy consumption and realize energy-saving optimization of the system. According to the system performance, the key components have been selected and calculated reasonably; choose the appropriate assist characteristic curve form based on the assist demand, and perform curve fitting of assist characteristic based on the vehicle speed coefficient in MATLAB curve fitting toolbox; the method of system control has been established according to the assist characteristic; the constant pressure type EHPS has been modeled in MATLAB/simulink software, and the systems assist response, control performance and power-following performance have been simulated and analyzed, and the energy consumption has also been calculated. The simulation results show that the constant pressure type EHPS can meet the dual requirements of steering assist and energy saving.
Keywords:Constant pressure type EHPS; assist characteristic; modeling and simulation
0引言
轉向系統對車輛的性能影響十分顯著,對該系統的研究和改進會提高系統的整體性能。助力轉向系統已有多種發展較好的類型,從前汽車上較多采用的是機械液壓助力轉向系統(Hydraulic Power Steering System,HPS)。隨著汽車電子技術的快速發展,電動助力轉向系統(Electric Power Steering System,EPS)和電動液壓助力轉向系統(Electric Hydraulic Power Steering System,EHPS)技術也迅速興起,在現在許多新能源的純電動商用車上都能夠加以應用。EHPS 保留了 HPS 工作的平順性和較大的轉向助力,同時兼顧了 EPS 的轉向輕便性,在中、重型車輛上的應用前景較為樂觀。本文對EHPS 系統進行節能優化研究,使優化后的常壓式 EHPS 系統既能滿足轉向助力的要求,又能在一定工況下降低系統的功耗損失,完成節能減排的技術革新,使EHPS 在新能源汽車尤其是純電動商用車上有比較良好的發展前途。
1常壓式EHPS相關部件的選型
由于傳統常流式EHPS能耗量是相當大的,本文對該型電動車的EHPS系統進行改造,在常流式EHPS的基礎上,增加關鍵零部件:蓄能器、電磁閥和蓄能器內壓力傳感器[1-3]。通過優化系統結構,使其能耗降低,力求適應當下發展的大環境。
1.1蓄能器的選型
考慮到液壓蓄能器在車輛上的安裝并綜合考慮蓄能器的使用壓力、有效容積和響應時間等因素[4-5],本文選氣囊式的蓄能器。對蓄能器的參數加以計算,選定高壓蓄能器工作壓力的最大值為10 MPa,根據國標,選擇無錫穆格流體控制有限公司的型號為NXQ-A-2.5/10-L-Y的蓄能器,其工作壓力為10 MPa,公稱容積為25 L。
1.2蓄能器內壓力傳感器的選取
蓄能器內壓力傳感器能檢測到的最大的壓力值應該大于蓄能器的標稱壓10 MPa,同時還要兼顧工作環境溫度和輸出信號等因素,選擇上海余洋傳感科技有限公司的以電壓信號為輸出信號的壓力傳感器。
1.3電磁閥的選型計算
根據系統性能,常壓式EHPS系統需要對轉向助力的大小進行實時的控制,比例流量閥是最適合的控制閥,ECU可以通過改變比例閥的控制電流來改變比例閥的開度,從而對流過電磁閥的油液流量進行調節。本文采用一款常閉的比例流量閥[6-7],閥的型號為BFW-2B-2B-17,該閥來自于無錫溫納自動化有限公司。
1.4液壓泵的選型計算
參照實驗車上原有的轉向泵的類型,選擇特性良好的、目前使用最為廣泛的葉片泵作為本系統的動力泵。經過調研分析,液壓泵的工作壓力在10 MPa即可滿足該型電動車的轉向需要。根據能量守恒定律:
η·P=p×Q。(1)
式中:η為助力效率;P為電機功率;p為目標助力油壓;Q為目標液壓泵流量。
可以計算得到目標液壓泵的流量Q=2.025 L/min,因此液壓泵選型需滿足 2.025 L/min的流量需求。
1.5電動機的選型計算
根據液壓泵匹配電機,為了滿足低噪聲、易控制、高性能的要求,本課題選用無刷直流電動機。市場上的無刷直流電動機的供電電壓一般為24 V或48 V,最大功率在400~600 W之間,符合本系統的要求。本文選用無刷直流電動機,選擇額定電壓12 V,額定轉速1 250 r/min,額定功率為500 W。
1.6其他傳感器選型
除了蓄能器壓力傳感器之外,系統還需要車速傳感器和轉向盤轉角傳感器等,在對這些傳感器進行選型時,考慮了這些傳感器在汽車上的使用環境和參數等因素,選用適合系統的傳感器。
2常壓式 EHPS 系統的助力特性
常壓式 EHPS助力需求與常流式 EHPS 的助力需求有所不同,對電機只需要簡單的啟停控制,助力特性主要是針對比例電磁閥而言的,控制電磁閥的電流就可以對系統的轉向助力進行控制[8]。
2.1系統助力特性曲線的確定
助力特性曲線決定了汽車轉向時的助力特性,設計良好的助力特性曲線對汽車轉向系統有著重要的影響[9],基于方便性的原則,采用直線型的助力特性曲線,根據對EHPS系統助力特性的要求,得到圖1的直線型助力特性曲線。
在相同的車速運行下,轉向盤角速度的增加要求電磁閥的工作電流也隨之增大,以此提供對應工況下的助力轉矩,確保良好的轉向助力;當車速為 0 時,助力特性曲線的斜率應該比其它車速下的曲線斜率大,以確保提供最大的轉向力。在轉向盤角速度一定的情況下,隨著車速越來越大,電磁閥控制電流是慢慢減小的,助力曲線的斜率也是減小的,當車速達到一定值時,助力特性曲線的斜率最小。
EHPS 系統進入到了助力飽和區,電磁閥的工作電流達到最大額定電流后不再繼續增加。
2.2助力特性曲線的擬合
車在不同的行駛工況下,不同的車速和方向盤轉向角速度與電磁閥控制電流大小之間的對應關系是進行 EHPS 系統助力特性曲線擬合的關鍵[10]。根據直線型助力線型的表達式和系統要求,設定方向盤角速度ω1=60°/s,ω2=60°/s。
在對轉向阻力矩進行了動力學研究之后,通過對機械模塊與液壓模塊的傳遞函數和模型的建立,可以得到不同車速和轉向盤轉速下對應汽車行駛工況的轉向阻力矩和相應的電磁閥控制電流的值。通過車速和方向盤轉速控制電磁閥的電流值,可以通過公式(2)進行表述:
I(v,ω)=k(v)·ω。(2)
式中:I為電磁閥電流;k為速度的負相關系數;ω為轉向盤角速度。
由于k是速度的負相關系數,則用k(ν)表示由速度決定的車速系數的表達式,由計算得出不同車速下的助力特性車速系數,見表1。
根據不同車速對應的車速系數,MATLAB 中通過曲線擬合工具箱Curve FittingTool(cftool)采用公式進行三次多項式的擬合。車速系數的擬合結果如圖2所示。
擬合結果的曲線趨勢可以正確反映助力需求與車速的對應關系。依據車速系數的擬合結果,再在MATLAB中通過曲面擬合工具箱 Surface Fitting Tool(sftool)擬合得到助力特性曲線的 MAP 圖,如圖 3所示。
該擬合的 MAP 圖曲線能夠得到與本文分析的理想助力特性曲線的特點一樣的結論,證明本文確立的助力特性曲線適用于本系統。
2.3常壓式 EHPS 系統控制策略
根據對助力特性曲線的描述和選取,系統的控制應該從電機和比例電磁閥兩方面入手,即需要在蓄能器內壓力不足的時候啟動電機補充液壓油,當達到一定壓力時停止電機運轉;在需要轉向助力時,根據助力特性曲線確定適宜當前工況的轉向助力,從而確定對應的控制電磁閥的電流值。根據系統這一特點,確立 EHPS 系統的控制策略框圖如圖4所示。
對系統的控制策略進行分析,確定了電機的控制方式為簡單的啟停控制,基于不同車速和轉向盤角速度對應不同的電磁閥的控制電流,確定了電磁閥的控制方式為閉環控制[11]。
3常壓式 EHPS 系統仿真結果及能耗分析
對常壓式EHPS 進行建模,確定MATLAB/simulink 軟件各自的建模任務,對系統的助力響應、助力跟隨性和控制性能進行了仿真分析,并對能耗進行計算。
3.1助力階躍響應仿真分析
汽車的瞬態響應性能是否良好對車輛在轉向時的穩定性與舒適性有著很大的影響,為了檢驗系統是否具有良好的操縱穩定性,本節對轉向助力進行階躍仿真。設定方向盤轉角穩定后為 30°,分別對這一角階躍輸入下車速為 40、60 km/h時的助力響應情況進行仿真,以各自對應車速恒定駕駛,開始計時 1s 后快速轉動轉向盤,使轉向盤達到預定的轉角,方向盤的角階躍輸入信號如圖5所示。
在這一角階躍輸入信號下,圖6和圖7分別為對應的電磁閥的電流響應情況。
由此可以總結出這樣一個結論,轉向盤突然轉動并保持一定角度不變,電磁閥能夠快速對這一動作做出響應,當汽車行駛速度較低時,電磁閥從開始響應到達到穩定狀態所用的時間略短,不同車速下電磁閥響應的電流大小也有所差別,能夠隨著車速而改變,且汽車行駛工況穩定時,轉向助力也比較平滑,不會產生太大的波動,使駕駛員駕駛車輛時能夠更加舒適,以便獲得良好的對路面的感知。
3.2助力跟隨性仿真分析
根據系統的模型,分別檢驗 EHPS 的助力跟隨性與方向盤轉速和車速的變化關系。
3.2.1EHPS 系統的助力跟隨性與轉向盤角速度
圖8為當汽車行駛速度為 20 km/h 時,液壓系統提供的液壓助力矩和方向盤力矩隨著轉向盤角速度的增大的變化關系曲線。
從圖8的曲線能夠看到,當轉向盤的角速度小于 60°/s時,由于此時轉向盤角速度較小,汽車行駛受到的轉向阻力較小,助力系統不提供動力,司機靠作用在轉向盤上較小的力矩就能夠進行轉向操作;當轉向盤的角速度大于等于 60°/s小于 540°/s并逐漸增大的過程中,轉向阻力越來越大,方向盤力矩也越來越大,這時 EHPS 要供給一定的液壓助力來協助司機完成轉向動作,以確保轉向操作的輕便性;當轉向盤角速度大于 540°/s 時,系統提供的助力值達到最大,且不超過原地轉向時需要提供最大的助力轉向值,此時轉向盤力矩也達到一個穩定值。該仿真結果表明轉向系統的助力需求與方向盤轉速之間的跟隨性良好。
3.2.2EHPS 系統的助力跟隨性與車速
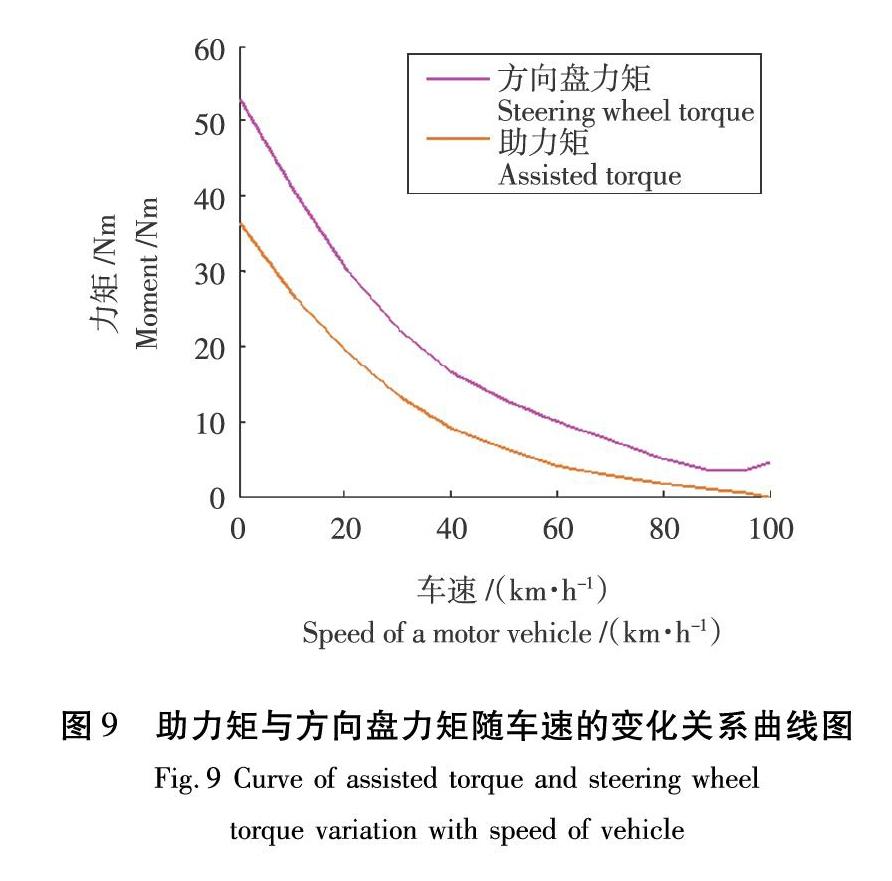
圖9為當轉向盤轉速一定時,伴隨行駛速度的提高,系統的液壓助力力矩與轉向盤轉矩的響應情況曲線。
從圖9中能夠看出,當方向盤角速度一定時,液壓助力力矩和方向盤力矩隨著車速的增大呈現逐漸減小的趨勢。當車速為 0 km/h 時,此時轉向阻力矩最大,轉向較為沉重,轉向盤上的轉矩此時最大,仿真結果約為 52 Nm ,與實車試驗時55 Nm比較符合。由于此時轉向沉重,液壓系統需要提供最大的液壓助力,以保證轉向的輕便性;隨著車輛行駛速度的逐漸增大,汽車的回正力矩是越來越小的,轉向阻力矩作用在方向盤上的力也逐漸減小,此時需要的液壓助力減小;當速度逐漸增大到 80 km/h時,系統提供的液壓助力達到一個比較小的水平,并幾乎趨于穩定;當大于 80 km/h 時,液壓系統幾乎不再提供轉向助力,使駕駛員有一個比較好的轉向路感,不至于因為方向盤發飄而發生交通事故,保證行車的安全。該仿真結果表明,常壓式 EHPS 的助力跟隨性與車速之間的響應關系較好,符合系統的助力需求。
3.3控制系統仿真分析
為了驗證助力特性曲線的合理性以及控制策略的可行性,分別對轉向盤角速度和車速影響下的電磁閥電流的實測值與跟進助力特性曲線設置的目標值進行比較。
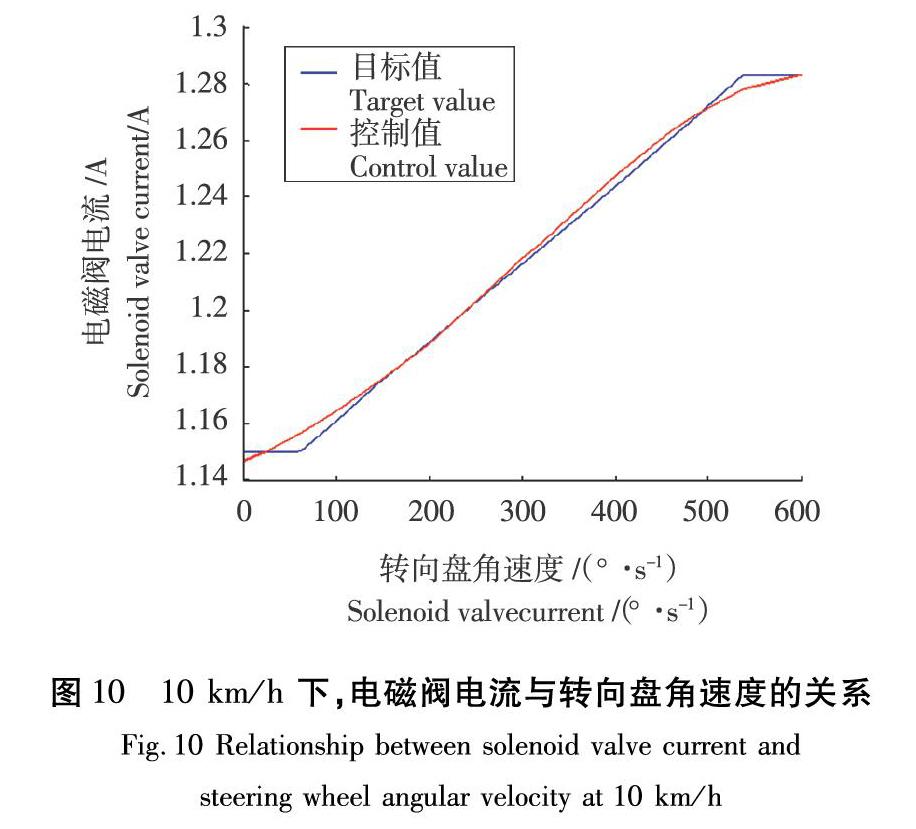
3.3.1電磁閥電流與轉向盤角速度
圖10和圖11分別給出了車速為10 km/h 和 60 km/h 時,方向盤的角速度與電磁閥電流的關系曲線圖。
通過這兩個圖可以看出,雖然實際控制值與目標值之間存在一定的偏差,但整體差別不大,波動范圍還比較合理,基本能實現目標助力曲線的要求。因此,在誤差允許的范圍內,電磁閥的電流值能夠隨轉向盤角速度的增大而升高,可以實現助力的實時調節。
3.3.2電磁閥電流與車速
本節對在一定的轉向盤角速度下,車速的變化對應的比例閥的電流變化關系進行了仿真研究,并與助力曲線的目標值進行對比,如圖12所示。
從圖12中曲線可以看出,電磁閥的控制值與目標值的趨勢很吻合,都是隨著車速的增大電流值逐漸減小。實際控制的電磁閥電流值與根據助力特性曲線設置的目標電流值在誤差允許的范圍內基本吻合。比例閥電流隨車速的變化具有良好的響應性。
3.4能耗分析
3.4.1非轉向工況時的能耗分析
在常流式 EHPS 系統中,當轉向系統不工作的時候,為了保持良好的助力響應性,以便在汽車突然進行轉向操作時能迅速為系統提供轉向助力,轉向系統中的電機需要保持一個怠速狀態,以一個較低轉速持續運轉,汽車在車速為 62.6 km/h 時電機的電流約為 10 A[12-13],本文研究的車型上電機以額定以8 A的電流進行怠速運轉。車輛在非轉向狀態下的常流式 EHPS和常壓式 EHPS 的電機電流大小情況如圖13所示。
從圖13中能夠分析出,車輛在非轉向狀態時,常壓式 EHPS 的電流值始終0A ,而常流式EHPS的電流值為8A,此時常壓式EHPS系統的電機能耗明顯低于常流式EHPS的電機能耗,常流式 EHPS 在非轉向工況下電機上的能耗是非常大的。
3.4.2轉向工況時的能耗分析
常壓式 EHPS 中,電機與液壓泵的能量損耗與常流式 EHPS中電機與液壓泵的能量損耗情況相同,不同的是電機和液壓泵的工作時間有所區別。按照市郊內汽車以 60 km/h 的速度行駛,在某次轉向過后,蓄能器內壓力達到閾值下限,直線行駛一定時間后,在某一點再次進行轉向操作時,5 s內電機的功耗情況來對比計算,常流式 EHPS 的電機的能耗為:
Wcc=P×5 s=1250×112≈105 (kw·min)
而常壓式 EHPS 電機以額定轉速運轉,為蓄能器內補充足夠的液壓油后即停止運轉,電機的工作時間為:
t=2.52.025≈1.23(s)
同樣以額定轉速運行大約 1.23 s 即可停止工作,因此它的能耗為:
W2=P×1.23 s=1250×1.2360≈25.63(kw·min)
由此可以計算出以同樣轉速工作的常流式EHPS比常壓式EHPS的電機能耗高出了4倍之多。兩種系統的電機工作情況如圖14所示。
通過計算對比分析,常壓式 EHPS 系統的電機能耗相比常流式 EHPS 系統的能耗減少了約有 75.5%。除了電機和液壓泵,電磁閥的閥口在工作的時候會產生一定的壓差,這個壓差也就是造成電磁閥的功率損失的主要來源,由于電源驅動的電磁閥的電流很小,最大的電磁閥電流也不會超過 1.5 A ,因此電磁閥部分的能量損耗相比較電動機和液壓泵來說十分微小,甚至可以忽略不計。結合以上分析,常壓式 EHPS 與常流式 EHPS 相比,能量損耗顯著減少,以電機和助力油泵部分減少的最為顯著[14-18]。
4結論
本文提出了一種常壓式EHPS系統,確定了適用該系統的直線型助力特性曲線形式,利用 MATLAB 擬合得到助力特性曲線的 MAP 圖,基于汽車轉向特性確定電機和電磁閥的控制策略。對系統的助力響應、控制性能和助力跟隨性進行了仿真分析,結果基本能滿足提出的轉向系統的性能需求。該系統結構上具有創新性,基本能夠滿足助力轉向系統的要求,也能達到比常流式 EHPS 系統更節能的目的。
【參考文獻】
[1]閆鵬鵬.A型純電動客車電動液壓助力轉向控制系統優化[D].南京:南京林業大學,2017.
YAN P P. Optimization of electric hydraulic power steering control system for the pure electric bus of model A[D]. Nanjing: Nanjing Forestry University, 2017.
[2]SUZUKI K, INAGUMA Y, HAGA K, et al. Integrated electro-hydraulic power steering system with low-electric energy consumption[J]. SAE Transactions, 1995, 104(1074): 189-195.
[3]王寧.汽車電動液壓助力轉向控制系統[D].天津:天津大學,2014.
WANG N. Electric hydraulic power steering control system for automobile[D]. Tianjin: Tianjin University, 2014.
[4]展竹義.電動液壓助力轉向系統的動力學研究及控制器設計[D].長沙:湖南大學,2014.
ZHAN Z Y. Dynamics research and controller design of electric hydraulic power steering system[D]. Changsha: Hunan University, 2014.
[5]邱義賓.汽車電動液壓助力轉向控制系統研究[D].重慶:重慶交通大學,2011.
QIU Y B. Research on automotive electro-hydraulic power steering system[D]. Chongqing: Chongqing Jiaotong University, 2011.
[6]呂連杰.商用車電動液壓助力轉向系統原理樣機搭建及臺架試驗[D].北京:清華大學,2014.
LV L J. The construction of the principle prototype of the electric hydraulic power steering system for commercial vehicles and the bench test[D]. Beijing: Tsinghua University, 2014.
[7]YONG C. Study on adaptive fuzzy PID control of electro-hydraulic power steering system of automobile[C]. International Conference on Electric Information and Control Engineering, IEEE, 2011.
[8]LIU Y H, JI X W. ?Matching strategy of electric power steering assistant characters based on the vehicle inherent road feel[J]. Proceedings of the Institution of Mechanical Engineers, 2011, 225(11): 1481-1491.
[9]朱佩,張振宇.電動液壓助力轉向系統的助力特性曲線設計及仿真[J].重慶交通大學學報(自然科學版),2011,30(4):852-855.
ZHU P, ZHANG Z Y. Design and simulation of power characteristic curve of electrohydraulic power steering system [J]. Journal of Chongqing Jiaotong University (Natural Science Edition), 2011, 30 (4): 852-855.
[10]唐斌.基于饋能型ESC的電控液壓助力轉向系統設計理論與控制方法研究[D].鎮江:江蘇大學,2015.
TANG B. Research on design theory and control method of electronic-controlled hydraulic power steering system based on energy-fed ESC[D]. Zhenjiang: Jiangsu University, 2015.
[11]周波.電動液壓助力轉向電子控制系統的研究[D].重慶:重慶交通大學,2010.
ZHOU B. Study on electronic control system of electrohydraulic power steering[D]. Chongqing: Chongqing Jiaotong University, 2010.
[12]ZEID A. Bond graph modeling of planar mechanisms with realistic joint effects[J]. ASME Journal of Dynamic Systems Measurement and Control, 1989, 111(1): 15-23.
[13]解后循,高翔.基于路感的電動液壓助力轉向系統優化設計[J].農業裝備與車輛工程,2015,53(2):25-30.
XIE H X, GAO X. Optimal design of electro-hydraulic power steering system based on road sense[J]. Agricultural Equipment and Vehicle Engineering, 2015, 53(2): 25-30.
[14]陳運來,李振山,彭能嶺,等.電動客車電動液壓助力轉向系統的匹配設計[J].客車技術與研究,2016,38(5):19-22.
CHEN Y L, LI Z S, PENG N L, et al. Matching design of electro-hydraulic power steering system for electric passenger cars[J]. Bus Technology and Research, 2016, 38(5): 19-22.
[15]夏長高,陳松,賀建軍,等.電動液壓助力轉向系統的控制算法研究[J].拖拉機與農用運輸車,2009,36(3):73-75.
XIA C G, CHEN S, HE J J, et al. Study on control algorithm of electric hydraulic power steering system[J]. Tractor and Farm Transporter, 2009, 36(3): 73-75.
[16]萬科.汽車助力轉向系統及其相關標準分析[J].客車技術與研究,2010,32(5):47-49.
WAN K. Analysis of automotive power steering system and its related standards[J]. Bus Technology and Research, 2010, 32(5): 47-49.
[17]吳偉國,袁方,宗衛鋒,等.雙車道公路小半徑彎道轉向行為及控制對策研究[J].公路工程,2018,43(4):154-159.
WU W G, YUAN F, ZONG W F, et al. Research on steering behavior and control countermeasures of small radius curves on dual lane highway[J]. Highway Engineering,2018,43(4):154-159.
[18]李書霞.電動液壓助力轉向系統動力學分析與控制策略研究[D].長沙:湖南大學,2015.
LI S X. ?Dynamics analysis and control strategy research of electrohydraulic power steering system[D]. Changsha: Hunan University, 2015.
