基于響應(yīng)面模型的滑移門動(dòng)力學(xué)特性多目標(biāo)優(yōu)化
2019-06-08 12:44:31陳梓銘郭鵬程熊勇李會(huì)玉李落星
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版 2019年4期
關(guān)鍵詞:優(yōu)化
陳梓銘 郭鵬程 熊勇 李會(huì)玉 李落星
摘? ?要:為了在滿足開啟輕便性的條件下提升滑移門的運(yùn)動(dòng)平順性,提出了基于響應(yīng)面模型的滑移門動(dòng)力學(xué)特性多目標(biāo)優(yōu)化方法.基于剛?cè)狁詈隙囿w動(dòng)力學(xué)方法建立某MPV車型的滑移門模型,對(duì)其運(yùn)動(dòng)平順性及開啟輕便性的評(píng)價(jià)指標(biāo)進(jìn)行分析,并通過滑移門臺(tái)架試驗(yàn)驗(yàn)證了該仿真方法的可靠性.對(duì)滑移門運(yùn)動(dòng)機(jī)構(gòu)進(jìn)行參數(shù)化設(shè)計(jì),結(jié)合拉丁超立方采樣法進(jìn)行試驗(yàn)設(shè)計(jì),通過對(duì)滑移門動(dòng)力學(xué)特性指標(biāo)進(jìn)行靈敏度分析,得到了結(jié)構(gòu)參數(shù)對(duì)性能的影響規(guī)律.建立精度可靠的滑移門動(dòng)力學(xué)特性二階響應(yīng)面模型,各項(xiàng)指標(biāo)的復(fù)相關(guān)指數(shù)R2 均高于0.9.采用NSGA-Ⅱ遺傳算法對(duì)滑移門運(yùn)動(dòng)機(jī)構(gòu)進(jìn)行多目標(biāo)優(yōu)化,滑移門中導(dǎo)向輪載荷峰值與質(zhì)心加速度峰值分別降低39%和24.4%,全開所需時(shí)間低于1.8 s,在滿足開啟輕便性要求的同時(shí),顯著提升了滑移門的運(yùn)動(dòng)平順性.
關(guān)鍵字:滑移門;動(dòng)力學(xué)分析;結(jié)構(gòu)參數(shù);響應(yīng)面方法;多目標(biāo)優(yōu)化
中圖分類號(hào):TB21 ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)志碼:A
Multi-object Optimization on Dynamic Characteristics
of Sliding Door Based on Response Surface Model
CHEN Ziming1, 2,GUO Pengcheng1, 2,XIONG Yong3,LI Huiyu1,2,LI Luoxing1,2
(1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hunan University,Changsha 410082,China;
2. College of Mechanical and Vehicle Engineering,Hunan University,Changsha 410082,China;
3. Changan Oushang Automobile Institute,Chongqing 400023,China)
Abstract: In order to optimize the ride comfort of the sliding door under the condition of meeting the handiness requirement,a respond surface method-based multi-object optimization method of the sliding door′s dynamic characteristics was proposed. The rigid-flexible coupled multi-body dynamic model of a MPV′s sliding door was established to investigate its ride comfort and handiness,and the results were verified by experiment based on a test rig. The motion mechanisms of the sliding door system were parametrically modeled and combined with the Latin hypercube sampling method. The sensitivity analysis was performed to study the effects of structural parameters on the sliding door's dynamics characteristics. Second-order response surface models of the dynamic indexes were established,in which correlation coefficients R2 are above 0.9. Finally,a multi-objective dynamic optimization on the sliding door was conducted by using NSGA-II algorithm. After optimization,the peak values of the middle guide roller load and acceleration of the door center mass were reduced by 39% and 24.4% respectively,and the time required for full opening was below 1.8 second. The ride comfort of the sliding door was improved significantly,while the requirement of handiness was met.
Key words: sliding door;dynamic analysis;structural parameter;response surface method;multi-object optimization
運(yùn)動(dòng)平順性和開啟輕便性是汽車滑移門重要的動(dòng)力學(xué)特性,對(duì)客戶在使用滑移門時(shí)的主觀感受及產(chǎn)品的使用壽命有重要影響.在傳統(tǒng)的滑移門運(yùn)動(dòng)機(jī)構(gòu)的設(shè)計(jì)過程中,由于缺乏對(duì)滑移門動(dòng)力學(xué)特性的管控,往往是在實(shí)車下線后才暴露出其運(yùn)動(dòng)平順性差和開啟困難的問題.因此,在前期設(shè)計(jì)階段對(duì)滑移門系統(tǒng)的動(dòng)力學(xué)特性進(jìn)行分析和優(yōu)化,有利于降低問題整改成本,縮短開發(fā)周期,提升車型的產(chǎn)品競爭力.
隨著配置有滑移門的MPV車型在市場上的占有率逐步提升,國內(nèi)外學(xué)者對(duì)汽車滑移門系統(tǒng)開展了研究.Muneer等[1]基于試驗(yàn)方法對(duì)滑移門最小關(guān)閉速度的影響因素進(jìn)行了探究,研究表明氣壓阻力是其中最主要的因素. Suzuki等[2]提出了一種應(yīng)用位置傳感器和開度控制系統(tǒng)的推拉繩索式電動(dòng)滑移門系統(tǒng),顯著減小了驅(qū)動(dòng)裝置的尺寸和重量.近年來,一些學(xué)者對(duì)滑移門的動(dòng)力學(xué)特性開展了研究.劉鵬飛等[3]建立了滑移門的運(yùn)動(dòng)學(xué)數(shù)學(xué)模型和多剛體動(dòng)力學(xué)模型,通過仿真分析揭示了滑移門在過彎時(shí)平順性降低的機(jī)理.蔣東升等[4]基于滑移門動(dòng)力學(xué)模型,研究了各滾輪在運(yùn)動(dòng)過程中的受力情況,發(fā)現(xiàn)中鉸鏈的前導(dǎo)向輪載荷遠(yuǎn)大于后導(dǎo)向輪.為優(yōu)化滑移門性能,廖鴻胡等[5]運(yùn)用正交試驗(yàn)設(shè)計(jì)方法,研究中導(dǎo)軌和中鉸鏈銷的布置對(duì)滑移門平順性的影響規(guī)律,實(shí)現(xiàn)了針對(duì)滑移門運(yùn)動(dòng)軌跡曲率的優(yōu)化.高云凱等[6]采用剛?cè)狁詈蟿?dòng)力學(xué)方法對(duì)滑移門系統(tǒng)進(jìn)行建模,考慮滑移門在運(yùn)動(dòng)過程中的彈性變形,提升了動(dòng)力學(xué)特性的仿真分析精度.文獻(xiàn)[7]對(duì)滑移門平順性的多目標(biāo)優(yōu)化方法開展研究,提出了基于正交試驗(yàn)設(shè)計(jì)和分級(jí)解密方法的鉸鏈銷位置優(yōu)化方法,以及基于評(píng)價(jià)函數(shù)方法的導(dǎo)軌結(jié)構(gòu)優(yōu)化方法.在這些優(yōu)化工作中,由于滑移門動(dòng)力學(xué)特性的非線性程度極高,以及正交試驗(yàn)設(shè)計(jì)的樣本數(shù)量較少,所以無法構(gòu)建精確的代理模型,導(dǎo)致難以運(yùn)用常規(guī)多目標(biāo)優(yōu)化算法找到兼顧運(yùn)動(dòng)平順性與開啟輕便性的滑移門運(yùn)動(dòng)機(jī)構(gòu)方案.
本文針對(duì)滑移門動(dòng)力學(xué)特性優(yōu)化困難的問題,提出基于響應(yīng)面的多目標(biāo)優(yōu)化方法.建立滑移門導(dǎo)軌的參數(shù)化建模方法,顯著提升滑移門動(dòng)力學(xué)仿真試驗(yàn)設(shè)計(jì)的效率,為構(gòu)建可靠的滑移門動(dòng)力學(xué)特性擬合模型提供充足的樣本數(shù)據(jù).隨后基于高精度擬合模型,實(shí)現(xiàn)了滑移門動(dòng)力學(xué)特性的多目標(biāo)優(yōu)化,在滿足開啟輕便性要求的同時(shí),顯著提升了運(yùn)動(dòng)平順性,對(duì)滑移門運(yùn)動(dòng)機(jī)構(gòu)的結(jié)構(gòu)設(shè)計(jì)和布置有重要指導(dǎo)意義.
1? ?滑移門動(dòng)力學(xué)特性分析及試驗(yàn)驗(yàn)證
1.1? ?滑移門系統(tǒng)剛?cè)狁詈隙囿w動(dòng)力學(xué)建模
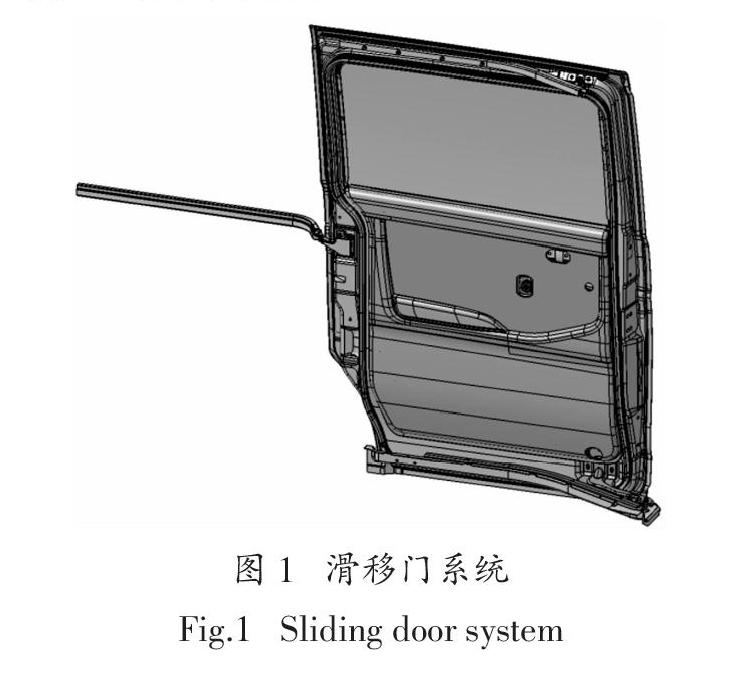
滑移門系統(tǒng)一般由滑移門、鉸鏈和導(dǎo)軌組成.滑移門主體包括門體焊接總成、門鎖機(jī)構(gòu)、內(nèi)外飾及玻璃升降器等部件,通過上、中、下支撐臂與3條導(dǎo)軌進(jìn)行配合,以實(shí)現(xiàn)其運(yùn)動(dòng)導(dǎo)向和支撐自重.對(duì)于一般的MPV車型,滑移門上支撐臂為鈑金沖壓件,臂上安裝有1個(gè)導(dǎo)向輪;滑移門的中、下支撐臂則為鉸鏈結(jié)構(gòu),在陽鉸鏈上安裝有2個(gè)導(dǎo)向輪與1個(gè)承重輪.圖1所示為一款緊湊型MPV車型的滑移門系統(tǒng),該滑移門的質(zhì)量為31.3 kg.為研究該滑移門系統(tǒng)的動(dòng)力學(xué)特性,需基于Adams/View軟件平臺(tái)對(duì)其進(jìn)行剛?cè)狁詈蟿?dòng)力學(xué)建模.
為了提升動(dòng)力學(xué)仿真的精度,需對(duì)滑移門和鉸鏈進(jìn)行柔性化處理,因此在有限元前處理軟件Hypermesh中對(duì)滑移門主體結(jié)構(gòu)和鉸鏈進(jìn)行建模,再提交給有限元分析軟件Nastran求解,生成它們的MNF(模態(tài)中性文件)[8].MNF可由Adams/View在動(dòng)力學(xué)仿真時(shí)調(diào)用,以實(shí)現(xiàn)滑移門和鉸鏈在運(yùn)動(dòng)過程中的彈性變形行為.為了減少計(jì)算成本,在有限元建模時(shí)將滑移門的鎖體、內(nèi)外飾和電器簡化為質(zhì)量點(diǎn),并根據(jù)實(shí)際連接情況,通過RBE2或RBE3與門體進(jìn)行連接,裝配完成的滑移門有限元模型如圖2所示.
滑移門系統(tǒng)的導(dǎo)向輪、承重輪及導(dǎo)軌均采用剛性建模,以降低計(jì)算資源消耗,以及避免仿真中出現(xiàn)由于網(wǎng)格粗糙而導(dǎo)致的異常接觸力.
如圖3所示,在Adams/View中通過旋轉(zhuǎn)副對(duì)門體、鉸鏈和各個(gè)滾輪進(jìn)行裝配,以實(shí)現(xiàn)鉸鏈和滾輪的旋轉(zhuǎn)運(yùn)動(dòng).需要注意的是,直接將CAD(計(jì)算機(jī)輔助設(shè)計(jì))數(shù)據(jù)導(dǎo)入Adams/View生成的導(dǎo)軌,由于其幾何特征粗糙,會(huì)導(dǎo)致仿真中的滾輪接觸力出現(xiàn)較多的毛刺.采用Adams/View中的Extrusion擠出功
能進(jìn)行建模,可以獲得幾何平滑的導(dǎo)軌剛體模型,如圖4所示.最后建立了各滾輪與導(dǎo)軌之間的接觸關(guān)系,形成完整的滑移門系統(tǒng)剛?cè)狁詈隙囿w動(dòng)力學(xué)模型,如圖5所示.
1.2? ?滑移門系統(tǒng)動(dòng)力學(xué)特性分析
以滑移門在關(guān)閉過程中的中導(dǎo)向輪載荷峰值和質(zhì)心合加速度峰值作為其運(yùn)動(dòng)平順性的評(píng)價(jià)指標(biāo).其中,中導(dǎo)向輪是指滑移門中鉸鏈的前導(dǎo)向輪,其載荷遠(yuǎn)大于后導(dǎo)向輪[4],對(duì)滑移門運(yùn)動(dòng)過程中的抖動(dòng)、異響和導(dǎo)向輪的磨損有極大影響.滑移門的質(zhì)心合加速度變化情況則反映其在運(yùn)動(dòng)過程中抖動(dòng)的強(qiáng)弱程度,直接影響使用者的操作手感和觀感.另外選擇滑移門全開所需時(shí)間作為開啟輕便性的評(píng)價(jià)指標(biāo),滑移門在特定加載方式下由關(guān)閉狀態(tài)運(yùn)動(dòng)至全開狀態(tài)所需的時(shí)間,可以反映其開啟的難易程度.
基于已建立的滑移門系統(tǒng)動(dòng)力學(xué)模型進(jìn)行關(guān)閉過程仿真,在門把手處施加沿車長方向朝車頭,初值為40 N的拉力.通過函數(shù)step(time,1,40, 1.1,0)對(duì)該拉力進(jìn)行控制,以模擬使用者在滑門關(guān)閉前松開把手的過程.經(jīng)過仿真分析,該滑移門系統(tǒng)的中導(dǎo)向輪載荷和門體質(zhì)心合加速度分別如圖6和圖7所示,它們?cè)谶\(yùn)動(dòng)過程中存在極大的突變,該突變出現(xiàn)在中導(dǎo)向輪進(jìn)入過彎處時(shí),峰值分別為552.6 N和1.63g.研究表明,過高的峰值會(huì)對(duì)滑移門的運(yùn)動(dòng)平順性和使用壽命有不良影響[9].另對(duì)該滑移門的開啟過程進(jìn)行仿真分析,加載工況為在門把手處施加沿車長方向朝車尾,大小50 N的恒定拉力,該滑移門從關(guān)閉位置運(yùn)動(dòng)至全開狀態(tài)所需時(shí)間為1.95 s.
1.3? ?滑移門系統(tǒng)動(dòng)力學(xué)特性試驗(yàn)驗(yàn)證
為驗(yàn)證滑移門系統(tǒng)動(dòng)力學(xué)仿真分析結(jié)果的準(zhǔn)確性,需對(duì)其進(jìn)行試驗(yàn)對(duì)標(biāo).為了規(guī)避車身裝配誤差對(duì)滑移門運(yùn)動(dòng)性能的影響,將滑移門安裝在試驗(yàn)臺(tái)架上進(jìn)行測(cè)試.由于直接測(cè)量中導(dǎo)向輪載荷較困難,且定制力傳感器的成本較高[10],本試驗(yàn)選擇的測(cè)量項(xiàng)為滑移門外板上的測(cè)點(diǎn)在關(guān)閉過程中的加速度,以及滑移門的全開所需時(shí)間.滑移門測(cè)試臺(tái)架如圖8所示,滑移門外板上共有5個(gè)測(cè)點(diǎn),其中,B測(cè)點(diǎn)與滑移門的幾何中心和質(zhì)心都非常接近,其加速度變化情況可以反映滑移門整體的抖動(dòng)情況.在各測(cè)點(diǎn)處安裝加速度傳感器,傳感器局部坐標(biāo)系中的Xs、Ys和Zs軸的正方向分別為豎直向上、沿車長方指向車頭和沿車寬指向外側(cè),該局部坐標(biāo)系會(huì)跟隨滑移門的運(yùn)動(dòng)而移動(dòng).
基于臺(tái)架進(jìn)行多次滑移門開啟和關(guān)閉試驗(yàn),全開所需時(shí)間的平均值為2.1 s,仿真試驗(yàn)誤差為7.1%.在試驗(yàn)中,滑移門在過彎時(shí)有明顯的抖動(dòng)和異響現(xiàn)象,與仿真分析結(jié)果中的中導(dǎo)向輪和加速度出現(xiàn)突變的現(xiàn)象一致.由于采集加速度信號(hào)時(shí)伴隨有噪聲及干擾,需要對(duì)加速度信號(hào)進(jìn)行低通濾波和去趨勢(shì)化處理.圖9所示為B測(cè)點(diǎn)在關(guān)閉過程中的加速度變化情況,由于中導(dǎo)向輪進(jìn)入中導(dǎo)軌圓弧段時(shí),滑移門的運(yùn)動(dòng)軌跡發(fā)生了突變,導(dǎo)致測(cè)點(diǎn)處各方向的加速度都發(fā)生劇烈變化.其中Zs方向加速度的突變情況最嚴(yán)重,峰值達(dá)到-1.722g.
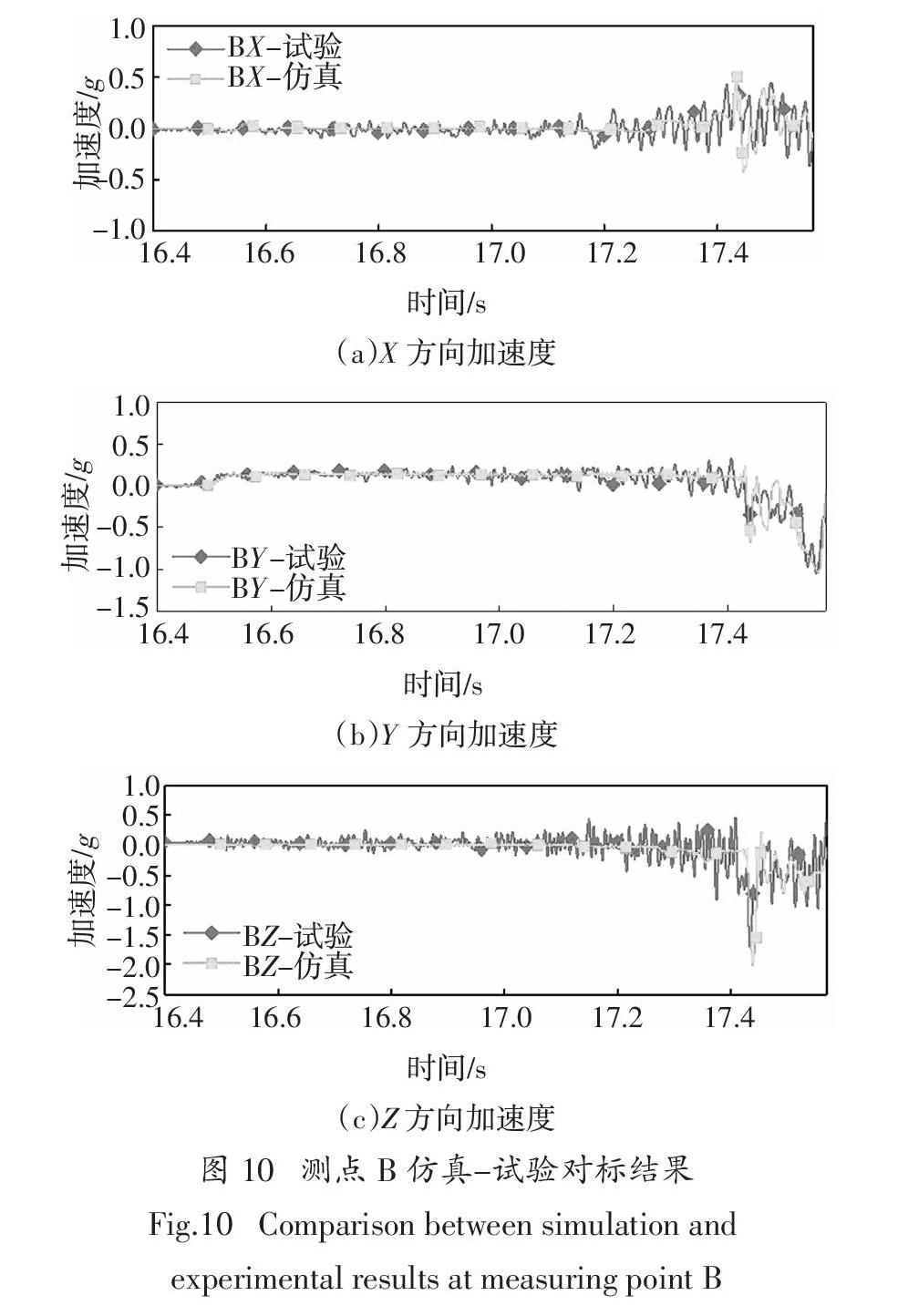
圖10所示為B測(cè)點(diǎn)加速度的仿真試驗(yàn)對(duì)標(biāo)情況,仿真分析得到該測(cè)點(diǎn)Xs、Ys與Zs 3個(gè)方向加速度曲線與試驗(yàn)測(cè)量結(jié)果趨勢(shì)一致.在加速度突變最劇烈的Zs方向,仿真分析的加速度峰值為-2g,與實(shí)測(cè)結(jié)果的誤差約為16.1%.其它測(cè)點(diǎn)的加速度對(duì)標(biāo)情況與B測(cè)點(diǎn)類似,各方向的加速度曲線仿真結(jié)果與實(shí)測(cè)曲線趨勢(shì)一致,且Zs方向加速度峰值的誤差低于18%.根據(jù)滑移門全開所需時(shí)間和外板測(cè)點(diǎn)加速度的對(duì)標(biāo)情況,該滑移門剛?cè)狁詈蟿?dòng)力學(xué)模型能反映滑移門在運(yùn)動(dòng)過程中的動(dòng)態(tài)特性,可用于指導(dǎo)滑移門系統(tǒng)的性能優(yōu)化工作.
2? ?滑移門系統(tǒng)動(dòng)力學(xué)特性靈敏度分析
滑移門運(yùn)動(dòng)機(jī)構(gòu)的結(jié)構(gòu)參數(shù)較多,如果對(duì)這些參數(shù)與其動(dòng)力學(xué)特性之間的關(guān)系缺乏認(rèn)識(shí),就無法在前期設(shè)計(jì)階段對(duì)滑移門運(yùn)動(dòng)機(jī)構(gòu)進(jìn)行合理設(shè)計(jì),導(dǎo)致后期優(yōu)化困難.因此,需要對(duì)滑移門動(dòng)力學(xué)特性的影響因素進(jìn)行靈敏度分析.
2.1? ?滑移門運(yùn)動(dòng)機(jī)構(gòu)參數(shù)化設(shè)計(jì)
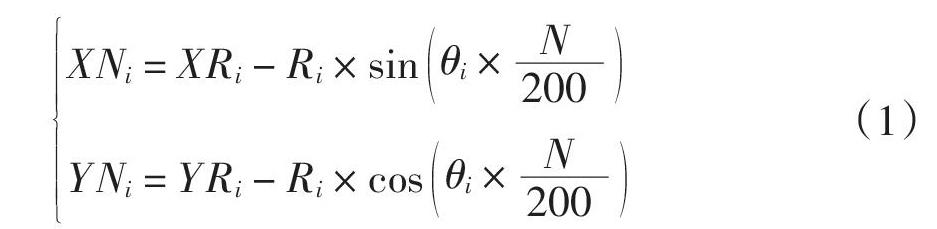
滑移門系統(tǒng)的動(dòng)力學(xué)特性非線性程度高,因此對(duì)其運(yùn)動(dòng)機(jī)構(gòu)的結(jié)構(gòu)進(jìn)行參數(shù)化設(shè)計(jì),有利于增加試驗(yàn)設(shè)計(jì)的樣本量,以提升靈敏度分析結(jié)果的可靠性.滑移門系統(tǒng)的導(dǎo)軌一般由兩條直線段與它們之間的圓弧段組成,其中圓弧段的半徑和兩直線段的夾角為導(dǎo)軌的主要結(jié)構(gòu)參數(shù).該仿真模型中的導(dǎo)軌是由Extrusion功能創(chuàng)建,因此通過對(duì)執(zhí)行該功能時(shí)所需的導(dǎo)軌軌跡線進(jìn)行參數(shù)化設(shè)計(jì),就能實(shí)現(xiàn)對(duì)導(dǎo)軌結(jié)構(gòu)的控制.在Adams/View中,通過Polyline樣條線功能建立導(dǎo)軌軌跡線,并對(duì)樣條線上各點(diǎn)的坐標(biāo)進(jìn)行參數(shù)化設(shè)計(jì).其中,導(dǎo)軌圓弧段的軌跡線由200個(gè)等分點(diǎn)和相鄰點(diǎn)之間的連線組成,其中任意第N個(gè)點(diǎn)PN的坐標(biāo)如式(1)所示:
式中:XRi、YRi、Ri和θi分別為第i條導(dǎo)軌軌跡線的圓弧段圓心Oi的X坐標(biāo)、圓心Y坐標(biāo)、圓弧半徑和直線段夾角(如圖11所示),i的取值為1、2、3,分別表示滑移門系統(tǒng)的上、中、下導(dǎo)軌;設(shè)計(jì)變量di,表示滑移門關(guān)閉狀態(tài)下,鉸鏈前導(dǎo)向輪與導(dǎo)軌前端的距離,通過改變?cè)搮?shù)可以調(diào)整導(dǎo)向輪和鉸鏈的初始位置.
如圖12所示,對(duì)中、下臂的陽鉸鏈結(jié)構(gòu)進(jìn)行參數(shù)化設(shè)計(jì),drj為導(dǎo)向輪的間距;wlj為鉸鏈銷距導(dǎo)向輪中垂線的距離;wkj表示鉸鏈銷與導(dǎo)向輪中心連線的距離.下標(biāo)j的取值為2、3,分別表示滑移門系統(tǒng)的中、下鉸鏈.值得注意的是,由于下臂鉸鏈銷一般位于導(dǎo)向輪中垂線上,因此wl3的值為0,不需要進(jìn)行參數(shù)化設(shè)計(jì).
通過對(duì)滑移門系統(tǒng)的導(dǎo)軌和鉸鏈進(jìn)行參數(shù)化設(shè)計(jì),共得到滑移門運(yùn)動(dòng)機(jī)構(gòu)的14個(gè)結(jié)構(gòu)參數(shù).
2.2? ?靈敏度分析
采用多目標(biāo)優(yōu)化軟件Isight與Adams/View進(jìn)行集成進(jìn)行試驗(yàn)設(shè)計(jì)(DOE),選擇合適的試驗(yàn)設(shè)計(jì)方法有利于提升靈敏度分析的效率和準(zhǔn)確性.常用的試驗(yàn)設(shè)計(jì)方法包括全因子設(shè)計(jì)、部分因子設(shè)計(jì)、正交數(shù)組設(shè)計(jì)和拉丁超立方設(shè)計(jì).其中,拉丁超立方設(shè)計(jì)是一種多維分層抽樣方法,能夠使各個(gè)因素相對(duì)均勻地填滿整個(gè)試驗(yàn)區(qū)間,而每個(gè)試驗(yàn)變量的水平只出現(xiàn)一次(如圖13所示).
采用拉丁超立方設(shè)計(jì)方法對(duì)滑移門運(yùn)動(dòng)機(jī)構(gòu)的14個(gè)結(jié)構(gòu)參數(shù)構(gòu)造樣本點(diǎn)矩陣,并進(jìn)行多體動(dòng)力學(xué)仿真分析,樣本數(shù)量為600個(gè).如圖14所示,分別為該14個(gè)結(jié)構(gòu)參數(shù)對(duì)滑移門中導(dǎo)向輪載荷峰值F、質(zhì)心加速度峰值A(chǔ)及全開所需時(shí)間T的Pareto圖,圖中只展示影響最大的前10個(gè)一階因素.根據(jù)各指標(biāo)的結(jié)構(gòu)參數(shù)影響排序可知,對(duì)中導(dǎo)向輪載荷峰值影響最大的結(jié)構(gòu)參數(shù)是中鉸鏈銷至中導(dǎo)向輪中垂線的距離wl2和中導(dǎo)向輪間距dr2;對(duì)滑移門質(zhì)心加速度影響最大的結(jié)構(gòu)參數(shù)是上、下導(dǎo)軌的直線段夾角θ1和θ3;對(duì)滑移門開啟所需時(shí)間影響最大的是結(jié)構(gòu)參數(shù)是中鉸鏈銷至中導(dǎo)向輪中垂線的距離wl2和中導(dǎo)軌傾斜角θ2.而下導(dǎo)軌的半徑R3及導(dǎo)向輪輪距dr3對(duì)滑移門系統(tǒng)的各項(xiàng)動(dòng)力學(xué)特性指標(biāo)的影響均極小.
3? ?滑移門動(dòng)力學(xué)特性多目標(biāo)優(yōu)化
3.1? ?響應(yīng)面擬合模型
根據(jù)所得的樣本點(diǎn)數(shù)據(jù),采用式(2)對(duì)滑移門的3個(gè)動(dòng)力學(xué)特性指標(biāo)進(jìn)行二階響應(yīng)面擬合:
式中:y為響應(yīng)輸出;xi和xj為不同設(shè)計(jì)變量;c0、ci 和cj為常系數(shù).另隨機(jī)選取100個(gè)新樣本點(diǎn),運(yùn)用R2誤差分析方法對(duì)擬合模型的精度進(jìn)行分析.分析結(jié)果如圖15所示,中導(dǎo)向輪載荷峰值F、滑移門質(zhì)心加速度峰值A(chǔ)和全開所需時(shí)間T的決定系數(shù)R2分別為0.98、0.916和0.966,說明該二階響應(yīng)面擬合模型的可信程度較高,可以取代滑移門系統(tǒng)的剛?cè)狁詈蟿?dòng)力學(xué)模型進(jìn)行優(yōu)化工作.
3.2? ?基于遺傳算法的滑移門系統(tǒng)多目標(biāo)優(yōu)化
為了改善滑移門的運(yùn)動(dòng)平順性和導(dǎo)向輪磨損情況,以中導(dǎo)向輪載荷峰值F最小,以及滑移門質(zhì)心加速度峰值A(chǔ)最小作為優(yōu)化目標(biāo);同時(shí)要滿足滑移門的開啟輕便性要求,以全開所需時(shí)間T低于
1.8 s作為約束條件.將滑移門運(yùn)動(dòng)機(jī)構(gòu)的14個(gè)結(jié)構(gòu)參數(shù)作為設(shè)計(jì)變量,建立的多目標(biāo)優(yōu)化數(shù)學(xué)模型
如下:
Variable: Ri,θi,di,drj,wlj,wkj
Objective: min F,A
s.t: T ≤1.8 s
i = 1,2,3; j = 2,3
采用NSGA-II(第二代非支配遺傳算法)優(yōu)化方法對(duì)該數(shù)學(xué)模型進(jìn)行迭代尋優(yōu)求解[11],群體規(guī)模為16,最大遺傳代數(shù)為30,而交叉率設(shè)置為0.9.對(duì)基于響應(yīng)面模型進(jìn)行優(yōu)化所得到的滑移門系統(tǒng)結(jié)構(gòu)參數(shù)進(jìn)行規(guī)整化處理,并代入滑移門系統(tǒng)動(dòng)力學(xué)分析模型中進(jìn)行計(jì)算,優(yōu)化效果如表1所示.
滑移門的中導(dǎo)向輪載荷峰值和滑移門質(zhì)心加速度峰值分別由552.6 N和1.63g降低至337.1 N和1.23g,降幅分別為39%和24.4%;滑移門全開所需時(shí)間由1.95 s降低至1.78 s,滿足了開啟輕便性的要求.對(duì)該優(yōu)化方案進(jìn)行運(yùn)動(dòng)干涉分析,滑移門在過彎階段與側(cè)圍的距離大于1 cm,無干涉風(fēng)險(xiǎn).但是由于滑移門運(yùn)動(dòng)機(jī)構(gòu)優(yōu)化方案與原方案差異較大,導(dǎo)致試驗(yàn)樣件制造成本過高,因此暫未對(duì)優(yōu)化方案進(jìn)行試驗(yàn)驗(yàn)證.
4? ?結(jié)? ?論
1)在Adams/View軟件中建立某MPV車型滑移門系統(tǒng)的剛?cè)狁詈戏抡婺P停?duì)其運(yùn)動(dòng)平順性和開啟輕便性指標(biāo)進(jìn)行分析.基于臺(tái)架開展滑移門測(cè)試,驗(yàn)證了該建模仿真分析有較高的精度.
2)提出滑移門運(yùn)動(dòng)機(jī)構(gòu),尤其是導(dǎo)軌結(jié)構(gòu)的參數(shù)化設(shè)計(jì)方法,顯著提升了試驗(yàn)設(shè)計(jì)的效率.根據(jù)大量樣本點(diǎn)數(shù)據(jù)進(jìn)行靈敏度分析,找到了滑移門平順性和開啟輕便性的主要影響因素.
3)結(jié)合二階響應(yīng)面方法與NSGA-II遺傳算法,對(duì)滑移門系統(tǒng)的動(dòng)力學(xué)特性進(jìn)行多目標(biāo)優(yōu)化.優(yōu)化后,關(guān)閉過程中的中導(dǎo)向輪載荷峰值及質(zhì)心加速度峰值分別降低39%和24.4%,且開啟所需時(shí)間低于1.8 s,在滿足開啟輕便性要求的情況下,顯著提升了滑移門的運(yùn)動(dòng)平順性.
4)由于制造試驗(yàn)樣件的成本較高,未對(duì)優(yōu)化后的滑移門運(yùn)動(dòng)機(jī)構(gòu)方案進(jìn)行試驗(yàn)驗(yàn)證.該滑移門動(dòng)力學(xué)特性多目標(biāo)優(yōu)化方法的效果將在后續(xù)新MPV車型的開發(fā)過程中進(jìn)行驗(yàn)證.
參考文獻(xiàn)
[1]? ? MUNEER M,SHARMA Y. Study of sliding door closing speed for a manually operated sliding door[C]// SAE 2015 World Congress & Exhibition.Detroit: SAE international,2015-01-1318.
[2]? ? SUZUKI S,F(xiàn)UKUMOTO R,OHHASHI M,et al. Development of power sliding door(PSD)system with push-pull cable driving method[C]// SAE 2000 World Congress.Detroit: SAE international,2000-01-0080.
[3]? ? 劉鵬飛,王義柏,鄭輝,等.車用滑移門系統(tǒng)多體運(yùn)動(dòng)動(dòng)力學(xué)分析建模[J].機(jī)電一體化,2013,19(5):18—22 ,61.
LIU P F,WANG Y B,ZHENG H,et al. Kinematic and dynamic modeling and analysis of automobile sliding door[J]. Mechatronics,2013,19(5):18—22,61.(In Chinese)
[4]? ? 蔣東升,杜國省,李永生,等.基于Adams/View的汽車滑移門動(dòng)力學(xué)仿真分析[J].計(jì)算機(jī)輔助工程,2013,22(S1):8—10,20.
JIANG D S,DU G X,LI Y S,et al. Dynamic simulation analysis on automotive sliding door based on Adams/View [J]. Computer Aided Engineering,2013,22(S1):8—10,20.(In Chinese)
[5]? ? 廖鴻胡,趙云飛,成艾國,等.基于正交試驗(yàn)的汽車滑移門平順性優(yōu)化研究[J].機(jī)電工程,2010,27(12):49—52.
LIAO H H,ZHAO Y F,CHENG A G,et al. Optimization on ride performance of automotive sliding door based on orthogonal experiments[J]. Journal of Mechanical & Electrical Engineering,2010,27(12):49—52.(In Chinese)
[6]? ? 高云凱,馬干干,杜倩倩.滑移門系統(tǒng)剛?cè)狁詈隙囿w動(dòng)力學(xué)特性研究[J].汽車技術(shù),2016(9):1—3,8.
GAO Y K,MA G G,DU Q Q. A study on dynamic characteristics of sliding door system based on rigid-flexible coupling multi-body model[J]. Automobile Technology,2016(9):1—3,8.(In Chinese)
[7]? ? LI Y J,GAO Y K,MA G G,et al. A study on optimization of the ride comfort of the sliding door based on rigid-flexible coupling multi-body model[C]// SAE World Congress Experience.Detroit: SAE International,2017-01-0417.
[8]? ? 周長江,胡波,祝智斌.某型包裝機(jī)推手機(jī)構(gòu)剛?cè)狁詈舷到y(tǒng)動(dòng)力學(xué)研究[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,41(5):39-43.
ZHOU C J,HU B,ZHU Z B. Dynamic study of pusher device system with rigid-flexible coupling in packing machine [J]. Journal of Hunan University(Natural Sciences), 2014, 41(5): 39—43. (In Chinese)
[9]? ? 周五峰,陳梓銘,繆利鋒,等.基于緩和曲線曲率修正的中滑門平順性提升[C]//2016中國汽車工程學(xué)會(huì)年會(huì)論文集.北京:中國汽車工程學(xué)會(huì),2016:1463—1465.
ZHOU W F,CHEN Z M,MIU L F,et al. Optimization for the smoothness of automobile sliding door based on curvature modification with transition curve [C]// 2016 SAE-China Congress Proceedings. Beijing: SAE-China,2016: 1463—1465.(In Chinese)
[10]? 劉鵬飛.汽車滑移門系統(tǒng)的運(yùn)動(dòng)學(xué)和多剛體動(dòng)力學(xué)建模與參數(shù)優(yōu)化[D].上海:上海交通大學(xué)機(jī)械與動(dòng)力工程學(xué)院,2013:36—40.
LIU P F. Multi-rigid-body kinematic and dynamic modeling and optimization of sliding door[D]. Shanghai: School of Mechanical Engineering,Shanghai Jiao Tong University,2013:36—40.(In Chinese)
[11]? 程軍圣,余.基于響應(yīng)面法的聽小骨消聲器的優(yōu)化設(shè)計(jì)[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,44(2):60—65.
CHENG J S,YU H. Optimal design of ossicular silencer based on response surface methodology [J]. Journal of Hunan University (Natural Sciences),2017,44(2):60—65.(In Chinese)
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45