基于參數識別的貼片機鍵合臂約束工況模態提取與特征分析
2019-06-11 11:35:28宮文峰張美玲陳輝王鑫
中國測試 2019年4期
關鍵詞:特征提取
宮文峰 張美玲 陳輝 王鑫
摘要:為掌握鍵合臂的模態特性對保障貼片機鍵合精度的影響,建立鍵合臂的模態特性綜合對比分析模型,以簡化安裝工況下的鍵合臂為對象,通過理論計算與實驗測試相結合的方法對比分析鍵合臂的約束模態特性。通過ANsYs有限元數值計算得到前6階振型特征,并以此為參考確定實驗中激振點布置方案,然后聯合使用IlMs Test.Lab錘擊系統和POLYTEc激光測振儀等工具對鍵合臂進行模態實驗。通過模態參數特征識別和提取,經一致性對比分析,得到鍵合臂準確的模態參數和剛度分布情況。研究表明,鍵合臂的一階固有頻率為306H7,遠高于外部激振源最高頻率,動態特性滿足設計要求。研究結果為貼片機鍵合臂的結構輕量化、結構優化及整機的防振、抑振等提供理論支撐和實驗參考。
關鍵詞:模態分析;參數識別;特征提取;貼片機;振動測試
中圖分類號:TM934文獻標志碼:A 文章編號:1674-5124(2019)04-0029-06
0引言
貼片機是LED后封裝產業的關鍵設備,主要功能是將晶圓芯片快速的貼裝在引線框架或PCB板等載體上。鍵合臂是LED貼片機擺臂機構中最重要的運動部件之一,在高頻高加速的擺動運行中,常因其剛度不足而產生殘余振動,實驗中通過用高倍CCD相機對貼片機擺臂機構采集運行動態圖像發現,在鍵合臂末端處產生最大位移偏量;在鍵合臂周邊有多部驅動電機,當伺服電機或外部環境工作頻率高于鍵合臂的低階固有頻率時將會產生共振現象,直接影響芯片的鍵合質量和精度。為獲取LED貼片機擺臂機構的力學性能及剛度分布情況,防止因外部激擾而共振,有必要研究鍵合臂的模態特性。文中采用有限元理論計算與試驗測試相結合的方法對國內某企業生產的LED貼片機某鍵合臂的模態特性進行了研究。通過對結果進行一致性比較,為擺臂機構鍵合臂的結構優化、防振抑振及故障診斷提供參考依據。
1LED貼片機擺臂系統
LED貼片機擺臂系統主要由步進電機1、偏心輪2、伺服電機3、壓輪4、平衡彈簧5、曲柄搖桿機構6、花鍵軸7、鍵合臂8和鍵合頭9等組成,如圖1所示。鍵合頭的運動由擺臂繞z軸作±90°的轉動和鍵合臂的上下垂直運動合成,可完成芯片的拾取、傳送和貼裝等往復連續動作。
鍵合臂是LED貼片機擺臂機構中最關鍵的運動部件,受空間布局和功能特征限定,鍵合臂的縱向尺寸大、結構復雜,在高頻高加速的往復擺動運行中,常因其結構剛度不足,在慣性力作用下產生較大的彈性變形和殘余振動,影響芯片鍵合精度。因此,在設計中要求鍵合臂部件應具有良好的力學性能,達到質量輕、剛度高、強度好及低階固有頻率遠離外部設備激振頻率的綜合特性。
2研究方法
模態是機械結構的固有本質屬性,模態特性分析是獲取結構體的低階固有頻率、振型特征、結構阻尼比等模態參數和性能的重要方法和途徑。在模態分析中,通常可采用理論計算或實驗測試的方法進行。為提高準確性,文中建立了鍵合臂的模態特性綜合對比分析模型,如圖2所示。該模型包含了理論計算模塊和實驗測試模塊,理論計算模塊對應模擬安裝工況的有約束狀態,實驗測試模塊對應安裝工況下的狀態,通過理論模態和實驗模態的對比分析,可以更準確地揭示被測對象的模態特性、剛度分布情況和結構特性。
本文運用有限元軟件ANSYS進行仿真數值計算得到前m階固有頻率和振型特征,然后根據仿真計算的振型特征得到每一階次節點(不振動的點)分布情況,再綜合考慮以仿真振型特征為參考指導模態實驗,進而確定激振點的位置。本研究聯合使用錘擊系統和激光傳感器獲取簡化安裝工況下的鍵合臂實驗模態數據,并對實驗和仿真結果作一致性對比分析,從而提高模態結果的可信度和準確性。
3計算模態分析
3.1鍵合臂有限元建模
根據鍵合臂的實際結構,先運用Solidworks工具建立其三維模型,然后直接導入ANSYS中進行網絡劃分,建立有限元模型。由于鍵合臂屬于三維對稱不規則實體結構,在劃分網格時應充分考慮網格數量及類型對計算結果精度的影響,保證計算效率和收斂性,采用Tetrahedrons劃分為10結點的四面體單元(sOLIDl87)。劃分網格后的有限元模型如圖3所示,有限元網格數據如表1所示。圖中顯示了包含鍵合臂的整個擺臂機構,由于本研究中經CCD相機多次影像監測發現,在擺臂機構中,鍵合臂的振動量最大,因此本文著重考察鍵合臂的模態特性,因而未對鍵合臂以外的結構進行網格劃分。
3.2計算模態結果與分析
通過ANSYS有限元數值計算,得到了鍵合臂在安裝工況下的模態特性。仿真計算中,擺臂機構除鍵合臂和連接鋼片外,其余部件不參與計算。在ANSYS中應用Frequency Finder模態求解器對鍵合臂模擬安裝工況下的約束模態進行求解。有限元求解過程實質上是將鍵合臂結構體進行離散化,得到有限個單元和節點,在模態分析中通常考查無阻尼自由振動,其動力學方程可表示為。
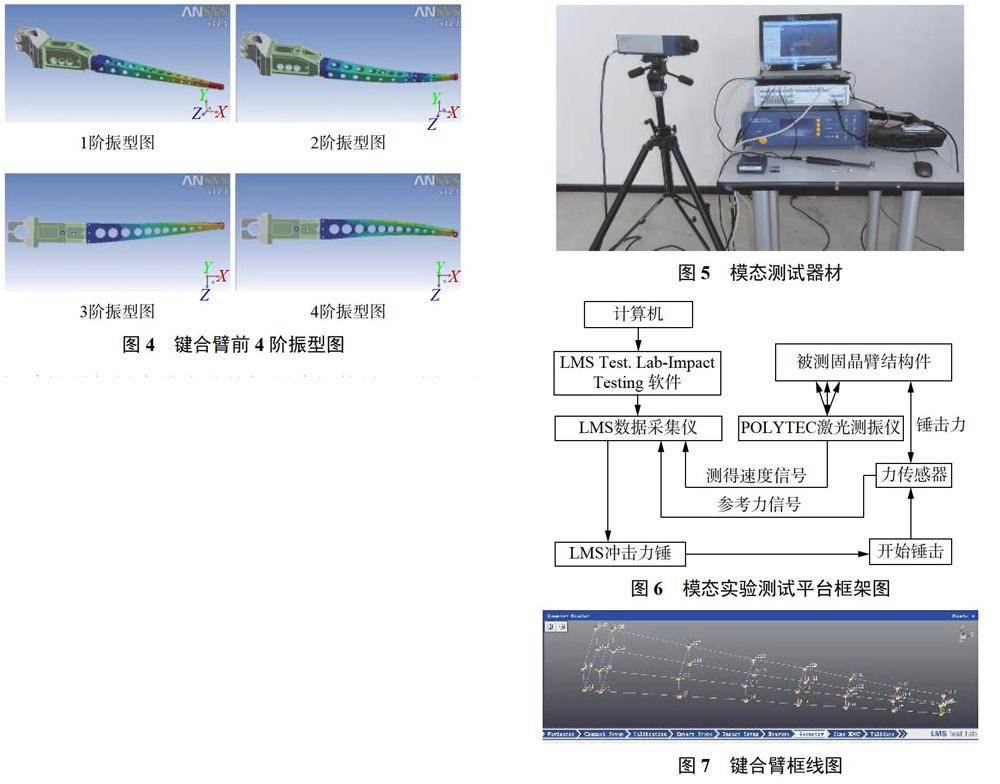
在ANSYS仿真計算中,其邊界條件參數設置與模態實驗相一致。仿真計算后可以得到n階次模態數據,理論上可以有無數個階次,實際上階次數與離散后有限元網格的節點數有關。在工程上最為關心低階次模態頻率和振型特征,本研究提取了鍵合臂在約束工況下的前6階模態數據,表2給出了前6階固有頻率值和相應的振型特征描述,圖4給出了前4階振型圖。
鍵合臂前兩階和第5階振型均為上下方向的擺動和彎曲變形,這與鍵合臂的內腔結構有很大關系,建議增加鍵合臂內腔的加固肋板數量;1階振型鍵合臂呈上下一次擺動,主要因素在于鍵合臂與支座之間由薄鋼片連接,此處為擺臂機構中剛度最為薄弱的環節,工作時極易因剛度不足導致芯片鍵合中產生“點頭”現象,建議增加鋼片厚度或此處改為一體式結構。3階和4階振型表現為鍵合臂左右方向的變形,可通過改變幾何尺寸來提高剛度。由于鍵合臂l階固有頻率為319.6Hz,而驅動擺臂機構的電機轉速范圍為0-3000r/min,對應的激擾頻率0-50Hz,兩者頻帶相離較遠,產生共振的風險較小,因此鍵合臂動態特性良好。
4試驗模態分析
4.1模態測試方法
鍵合臂屬輕質量結構件,經多次試驗研究發現,傳統的在鍵合臂上貼裝加速度傳感器會因其附加質量導致所測試件的固有頻率存在一定的偏差量。為避免傳感器附加質量對測試結果產生影響,本模態實驗采用了非接觸式激光測振儀作為拾振手段,聯合運用最先進的比利時LMS公司和德國POLYTEC公司的測試系統及其他器具配合進行,實驗器材如圖5所示,主要測試設備包括:LMSTest.Lab錘擊測試系統、POLYTEC激光測振儀、帶力傳感器的力錘等,并按圖6搭建測試平臺。
本試驗采用單點激勵單點采集(SISO)的方法對鍵合臂某標準樣件進行了模態實驗。測試時采用力錘作為激振工具,考慮到貼裝加速度傳感器會給鍵合臂帶人較大的附加質量影響,因此采用激光測振儀作為非接觸式拾振工具;由于鍵合臂結構較為薄弱,考慮到錘擊鍵合臂前端時會經常產生信號過載影響測試結果,因此本試驗根據實際情況采用了固定激振點移步拾振點進行測試,并以仿真結果作為參考選定激振點和拾振點。根據仿真計算的前6階振型可以看出,鍵合臂中部振型較為活躍,較少的存在節點,結合多次重復性試驗和預測試,最后本試驗中選定的激振點位置為Pomtl2,拾振點位置為Pointl-32,以上激振點和拾振點分別從上下和前后兩個方向錘擊和拾振;在LMS Test.Lab-ImpactTesting界面上定義各測點位置,制作了鍵合臂框線圖如圖7所示。
本實驗擬測取鍵合臂在安裝工況下的模態特性,著重考察鍵合臂的模態特性,由于鍵合臂在實際工作中與電機軸之間通過連接接頭裝配在一起,而連接接頭相對堅固可靠,因此本實驗拆除了鍵合臂上的附加配件,僅保留了鍵合臂必要的連接件,并將拆裝后的擺臂機構的后支座用夾具緊固在試驗架上進行測試。采樣頻率的設置參考了ANSYS計算結果,根據香農定理,取前6階最高固有頻率的2倍,即2600x2=5200Hz;為仿真信號衰減,添加適當的窗函數,對錘擊力信號添加Force-Exponential窗,對拾振信號添加指數窗,測試中采用5次平均處理。
4.2試驗模態測試結果
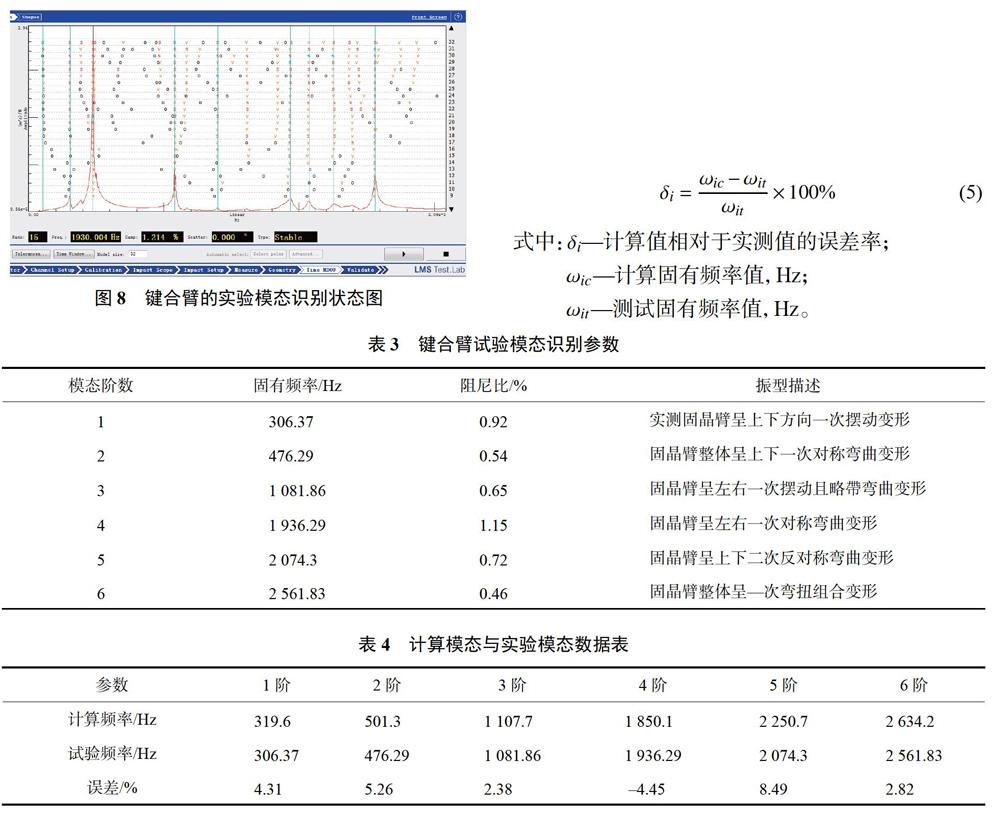
對鍵合臂進行錘擊模態實驗后,經參數辨識、模態截斷和提取,最終得到了鍵合臂的前6階固有頻率和相應主振型。圖8為本模態實驗經集權平均后獲得的模態識別狀態圖,圖中紅色曲線為總的頻率響應函數曲線,模態識別狀態圖中的字母s表示極點穩定;o表示極點不穩定,從中提取較穩定的頻率波峰。
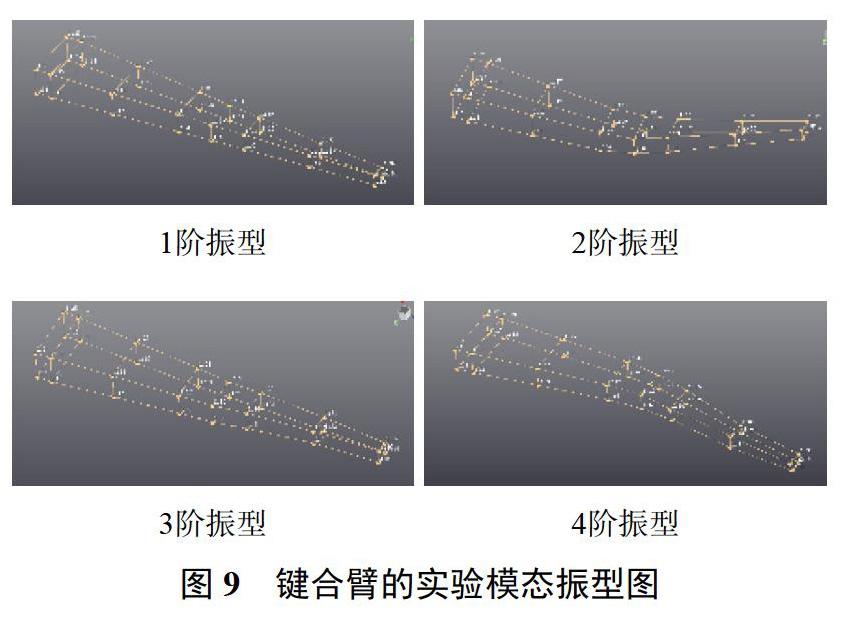
本模態實驗提取的鍵合臂的前6階模態數據如表3所示,給出了各階固有頻率值及對應的阻尼比,可以看出一階固頻為306.37Hz,與仿真結果較為接近,且測試所得到的各階固有頻率所對應的阻尼比均在1.2%以下,與實際較為吻合。圖9給出了前4階實驗模態振型圖,可以看出各階次振型特征和趨勢明顯,具有規律性,并且實驗振型與仿真振型兩者相似性很高,低階次振型變動趨勢基本吻合,由振型特征可以看出,本次模態實驗效果良好,并且獲取了仿真中無法得到的阻尼參數。
4.3理論與實驗結果對比分析
本研究采用ANSYS有限元模態仿真計算與模態實驗相結合的方法獲取了鍵合臂在簡化安裝工況狀態下的模態特性,分別得到了鍵合臂的前6階固有頻率、阻尼比和振型。本次試驗經過較多的重復測試,較好的激起了鍵合臂的各階模態,表4給出了有限元計算的前6階固有頻率值與實驗測得的頻率值數據。
根據本文所給出的模態特性綜合對比分析模型及研究方法,采用以仿真結果指導實驗,再以實驗結果來反向驗證仿真有限元模型的正確性,并計算仿真值與實驗值的誤差量式中:δi-計算值相對于實測值的誤差率;
ωic—計算固有頻率值,Hz;
ωit-測試固有頻率值,Hz。
經仿真與實驗數據對比后可看出,兩者所得到的前6階固有頻率比較接近,最大誤差量在8.5%以內,尤其是1階固有頻率誤差僅為4.31%,且測試所得到的各階固有頻率所對應的阻尼比均在1.2%以下,與實際較為吻合,因此可以認為本研究所得到的前6階固有頻率是可信的。對比圖4和圖9可以看出,兩者振型特征相似度很高,尤其前4階振型變動趨勢基本一致。以上結果充分表明有限元仿真模型精度較好,其網格劃分方法及邊界條件處理基本正確,能較真實地逼近鍵合臂的實際動態特性,可為后續的鍵合臂結構改進、防振、抑振以及故障診斷等提供參考。
5結束語
為獲取某LED貼片機鍵合臂的模態特性及其影響因素,給出了模態特性綜合對比分析模型,采用了ANSYS有限元理論計算與模態實驗測試相結合的研究方法,得到了鍵合臂在簡化安裝工況下的模態數據,通過對鍵合臂進行有限元建模、仿真、試驗、模態提取與辨識,得到的主要結論有:
1)通過對比仿真與實驗結果得出,本研究的前6階固有頻率值比較接近,最大偏差量小于8.5%,一階固有頻率誤差僅為4.3%,前6階實測阻尼比在1.2%以內;前4階振型特征和變動趨勢基本吻合,表明本研究的有限元仿真模型精度較好,其網格劃分方法及邊界條件處理基本正確,能較真實地逼近鍵合臂的實際動態特性,可為后續的鍵合臂結構改進、拓撲優化提供參考,而不需再重復做振動試驗,縮短了產品研發周期。
2)從固有頻率方面看,鍵合臂的一階固有頻率小于320Hz,而驅動擺臂機構的電機轉速范圍為0-3000r/min,對應的激擾頻率0-50Hz,兩者頻帶相離較遠,說明鍵合臂與周邊激擾產生共振的風險較小。
3)從振型云圖和剛度分布方面看,鍵合臂的內腔體的結構較為薄弱,應當考慮增加鍵合臂內腔側加固肋板的數量和壁厚;其次鍵合臂與支座的連接方式建議將薄鋼片連接改進為直連一體式結構,以增強結構剛度;工程中建議盡量減小鍵合臂最前端的附加質量,防止帶來較大的轉動慣量和慣性載荷。本研究結果為貼片機鍵合臂的防振、抑振以及故障診斷等提供了理論支撐和實驗參考,研究方法具有普適性,可為同行解決類似問題提供參考。
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49