多軸車輛輪橋加載試驗(yàn)臺的解耦控制實(shí)驗(yàn)研究
2019-06-13 09:35:28王慧趙國超金鑫
中南大學(xué)學(xué)報(自然科學(xué)版) 2019年4期
關(guān)鍵詞:實(shí)驗(yàn)
王慧,趙國超,金鑫
(1.遼寧工程技術(shù)大學(xué) 機(jī)械工程學(xué)院,遼寧 阜新,123000;2.哈爾濱工業(yè)大學(xué) 機(jī)電工程學(xué)院,黑龍江 哈爾濱,150001)
隨著對車輛安全可靠性和運(yùn)行性能要求的不斷提高,車輛關(guān)鍵部件的模擬加載試驗(yàn)研究越來越受到重視[1–2]。車輛的安全可靠性和運(yùn)行性能在很大程度上取決于車輛發(fā)動機(jī)和輪橋的工作特性,而車輛發(fā)動機(jī)往往是既定的按需選型產(chǎn)品,因此,合理設(shè)計車輛輪邊和傳動橋并進(jìn)行各種復(fù)雜工況下的模擬加載試驗(yàn)至關(guān)重要[3]。作為一類用于特殊作業(yè)的重型車輛,其傳動橋多為四軸或多軸輸出,工況更為復(fù)雜,因此,對多軸車輛傳動橋以及輪邊的模擬加載試驗(yàn)尤為重要[4–5]。傳統(tǒng)輪橋加載試驗(yàn)臺可完成相對簡易的單項(xiàng)試驗(yàn),但存在功耗大、效率低等缺陷[6]。對于相對復(fù)雜的綜合試驗(yàn),可采用電封閉加載試驗(yàn)臺來實(shí)現(xiàn),但所需電器設(shè)備龐大,且電網(wǎng)形式的能量回收存在沖擊和電污染現(xiàn)象,極易出現(xiàn)元器件毀壞等問題[7]。基于二次調(diào)節(jié)的模擬加載試驗(yàn)臺[8–9]在模擬傳動橋?qū)嶋H工況的加載方面具有較高的可靠性和可控性,且價格相對低廉。尤其在動態(tài)模擬加載方面,此類試驗(yàn)臺具有明顯優(yōu)勢[10],能量回收效果顯著,與普通的液壓節(jié)流加載相比,可節(jié)能30%以上[11]。但二次調(diào)節(jié)加載試驗(yàn)臺模擬驅(qū)動的轉(zhuǎn)速控制系統(tǒng)和模擬加載的轉(zhuǎn)矩控制系統(tǒng)通過恒壓油源網(wǎng)絡(luò)和機(jī)械傳動軸系耦聯(lián)在一起[12],使得轉(zhuǎn)速和轉(zhuǎn)矩控制系統(tǒng)存在嚴(yán)重的耦合干擾問題[13],造成試驗(yàn)臺動態(tài)模擬加載穩(wěn)定性和準(zhǔn)確性下降[14–15]。本文作者針對基于二次調(diào)節(jié)的模擬加載試驗(yàn)臺,建立二次調(diào)節(jié)輪橋傳遞函數(shù)模型及實(shí)驗(yàn)現(xiàn)場,求解出對角矩陣,并利用對角矩陣對系統(tǒng)進(jìn)行解耦控制,最后通過耦合干擾實(shí)驗(yàn)及解耦控制實(shí)驗(yàn),得到耦合干擾的規(guī)律,確定解耦控制方法的有效性,提高試驗(yàn)臺的可控性和可靠性。
1 多軸車輛輪橋模擬加載試驗(yàn)臺
以特種作業(yè)的4軸重型卡車為原型,其傳動軸系包括驅(qū)動輸入軸、輪邊(左、右)輸出軸和二次輸出軸,搭建的模擬加載試驗(yàn)臺組成如圖1所示。由圖1可見:試驗(yàn)臺主要包括恒壓油源、驅(qū)動單元、二次輸出和輪邊加載單元、傳動橋和計算機(jī)控制系統(tǒng)。驅(qū)動和加載各單元的核心是二次元件(4組),其液壓口通過液體壓力耦合并聯(lián)于恒壓油源提供的恒壓網(wǎng)絡(luò)上,機(jī)械口通過轉(zhuǎn)速轉(zhuǎn)矩傳感器、變速器、傳動橋和輪邊等機(jī)械耦合聯(lián)接在一起[16–17]。試驗(yàn)臺的功能是對驅(qū)動轉(zhuǎn)速和輸出轉(zhuǎn)矩進(jìn)行調(diào)節(jié),實(shí)現(xiàn)對傳動橋及輪邊的驅(qū)動和輸出轉(zhuǎn)矩進(jìn)行模擬。1號二次元件模擬車輛發(fā)動機(jī)驅(qū)動轉(zhuǎn)速,2號二次元件模擬傳動橋二次輸出轉(zhuǎn)矩,3號和4號二次元件分別模擬左右輪邊輸出轉(zhuǎn)矩。系統(tǒng)工作時,1號二次元件(馬達(dá)工況)將來自恒壓油源的液壓能轉(zhuǎn)換成機(jī)械能,并通過傳動橋輸入給2號、3號和4號二次元件(泵工況),實(shí)現(xiàn)對傳動橋的加載。與此同時,2號、3號和4號二次元件又將輸入的機(jī)械能轉(zhuǎn)換為液壓能,重新回饋給1號二次元件(馬達(dá)),從而形成1個閉式循環(huán)的功率流[18],實(shí)現(xiàn)能量回收。由于系統(tǒng)是通過機(jī)械耦合與液壓耦合2種連接形式組成的,因此,驅(qū)動單元的壓力波動會通過液壓網(wǎng)絡(luò)影響輪邊輸出單元和二次輸出單元的壓力,同時,輸出單元的壓力波動又會影響到驅(qū)動單元的壓力,此種耦合形式為液壓耦合;模擬4個軸系的元件通過聯(lián)軸器、傳感器、變速器等環(huán)節(jié)直接與加載傳動橋聯(lián)接,構(gòu)成四軸機(jī)械傳動系統(tǒng),每個單元的負(fù)載敏感系數(shù)存在差異,因此,造成驅(qū)動單元與輸出單元存在較強(qiáng)的耦合干擾,某個單元出現(xiàn)波動都會對其他單元造成不同程度的影響,從而影響整個試驗(yàn)臺的加載性能,此種耦合形式為機(jī)械耦合。
2 二次調(diào)節(jié)試驗(yàn)臺加載系統(tǒng)建模
針對圖1所示加載試驗(yàn)臺,根據(jù)二次元件、閥控變量液壓缸[19]、傳動橋等的結(jié)構(gòu)和工作原理,建立加載系統(tǒng)各環(huán)節(jié)的數(shù)學(xué)模型如下。
二次元件前置級排量控制的電液伺服閥流量方程為
式中:Q(s)為閥輸出流量,m3/s;V(s)為的輸入電壓,V;Kv為的流量補(bǔ)償系數(shù),m3/(s·V);ωv為閥的固有頻率,Hz;ξv為閥的阻尼比。
變量液壓缸流量平衡方程為

式中:qvi為變量液壓缸流量,m3/s;yi為變量液壓缸活塞位移,m;Agi為變量液壓缸有效作用面積,m2;Cti為變量液壓缸泄漏系數(shù),m3/(s·Pa);pLi為變量液壓缸負(fù)載壓力,Pa;Vti為變量液壓缸總?cè)莘e,m3;βe為液壓油體積彈性模量,N/m2;i為變量液壓缸標(biāo)號,i=1,2,3,4。
變量液壓缸力平衡方程為

式中:mi為變量液壓缸等效質(zhì)量,kg;Bci為變量液壓缸阻尼系數(shù),N·s/m;Ki為負(fù)載彈簧剛度,N/m;Fi為變量液壓缸外負(fù)載力,N。
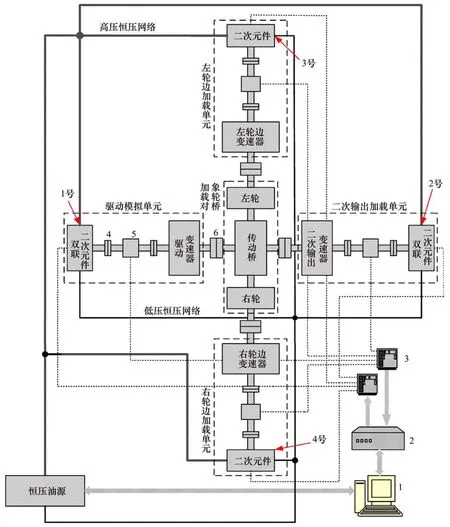
圖1 輪橋加載試驗(yàn)臺組成Fig.1 Composition of loading test bench for wheel-bridge
二次元件排量方程為

式中:Vi為二次元件排量,m3/rad;Vm為二次元件最大排量,m3/rad;Xgm為液壓缸活塞最大行程,m;Xgi為第i個液壓缸活塞行程,m。
驅(qū)動單元二次元件力矩平衡方程為

式中:M1t為二次元件理論輸出轉(zhuǎn)矩,N·m;M1為二次元件實(shí)際輸出轉(zhuǎn)矩,N·m;Δp1為二次元件油口壓差,MPa;V1為二次元件排量,m3/rad;J1為二次元件輸出端及聯(lián)軸器輸入軸等效轉(zhuǎn)動慣量,kg·m2;R1為二次元件等效阻尼系數(shù),N·m·s/rad;φ1為二次元件轉(zhuǎn)角,rad。
由于左、右輪邊和二次輸出均為輸出加載單元,結(jié)構(gòu)形式及模型完全相同,以二次輸出加載單元為例,建立加載單元二次元件的力矩平衡方程:

式中:Δp2為二次元件油口壓差,MPa;V2為二次元件排量,m3/rad;J2為二次元件輸出端及彈聯(lián)軸器輸出軸等效轉(zhuǎn)動慣量,kg·m2;R2為二次元件阻尼系數(shù),N·m·s/rad;φ2為二次元件轉(zhuǎn)角,rad。
加載輪橋等效物理模型如圖2所示。根據(jù)圖2,忽略柔性環(huán)節(jié)及傳動時的差速問題可建立加載輪橋等效力矩平衡方程:

式中:Mq1為輪橋輸入軸轉(zhuǎn)矩,N·m;Mq2為輪橋二次輸出軸轉(zhuǎn)矩,N·m;Mq3為左輪邊輸出軸轉(zhuǎn)矩,N·m;Mq4為右輪邊輸出軸轉(zhuǎn)矩,N·m;Jq為整個輪橋等效轉(zhuǎn)動慣量,kg·m2;Rq為整個輪橋等效阻尼系數(shù),N·m·s/rad;iq為傳動橋速比;ix3為左輪邊減速器傳動比;ix4為右輪邊減速器傳動比;φq1為輸入軸轉(zhuǎn)角,rad。
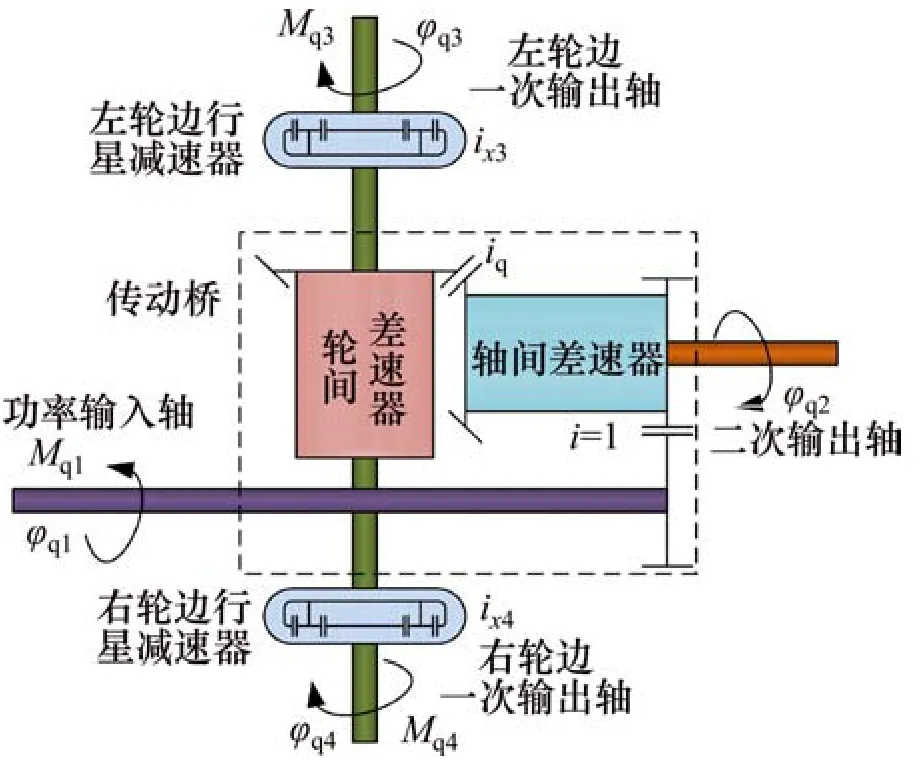
圖2 輪橋物理模型Fig.2 Physical model of wheel-bridge
對式(1)~(7)進(jìn)行拉氏變換,按照試驗(yàn)臺機(jī)械件的參數(shù)整理系統(tǒng)比例環(huán)節(jié)和阻尼環(huán)節(jié)。各環(huán)節(jié)具體表示如下。
轉(zhuǎn)速、轉(zhuǎn)矩系統(tǒng)二次元件及傳感器綜合傳遞函數(shù)為
式中:n=1,2,3,4;pL為網(wǎng)絡(luò)負(fù)載壓力;Ky為位移傳感器變換系數(shù)。
加載系統(tǒng)機(jī)械件綜合慣性阻尼環(huán)節(jié)傳遞函數(shù)為

加載系統(tǒng)機(jī)械輸入端比例環(huán)節(jié)傳遞函數(shù)為
式中:ib1為驅(qū)動變速器傳動比;ib2為二次輸變速器傳動比;ib3和ib4分別為左、右輪邊變速器傳動比。
轉(zhuǎn)速傳感器變換系數(shù):K11=0.019 2;轉(zhuǎn)矩傳感器變換系數(shù):K21=0.004 95;K31=K41=0.009 91;系統(tǒng)輸出端比例環(huán)節(jié)傳遞函數(shù):K22=K32=K42=0.232。
根據(jù)上述推導(dǎo),在系統(tǒng)前置級排量閥控缸模型中加入微分濾波PID控制器[20],可得整個系統(tǒng)的傳遞函數(shù)方塊圖模型如圖3所示。圖3中,N1i~N1o為驅(qū)動單元轉(zhuǎn)速控制系統(tǒng),M2i~M2o為傳動橋二次輸出單元的轉(zhuǎn)矩控制系統(tǒng),M3i~M3o和M4i~M4o分別為左、右輪邊輸出單元的轉(zhuǎn)矩控制系統(tǒng)。在整個系統(tǒng)中,轉(zhuǎn)速系統(tǒng)受轉(zhuǎn)矩系統(tǒng)的直接控制;轉(zhuǎn)速系統(tǒng)又通過慣性阻尼環(huán)節(jié)控制轉(zhuǎn)矩系統(tǒng),因此,系統(tǒng)驅(qū)動轉(zhuǎn)速與輸出轉(zhuǎn)矩存在一定程度的耦合干擾問題。
3 對角解耦控制矩陣的求解
為了解決試驗(yàn)臺加載系統(tǒng)轉(zhuǎn)速與轉(zhuǎn)矩間的耦合干擾問題,對試驗(yàn)臺取用對角矩陣解耦[21]控制方法。根據(jù)試驗(yàn)臺的輸入、輸出模型可知,實(shí)現(xiàn)系統(tǒng)解耦需使系統(tǒng)的傳遞函數(shù)為對角矩陣形式。因此,為實(shí)現(xiàn)傳遞函數(shù)對角化,在模擬加載系統(tǒng)各單元之間引入特定的非奇異解耦矩陣E12,E13,E14,E21,E31和E41,如圖4所示。根據(jù)圖4解耦控制模型,中間變量X1,X2,X3和X4與控制變量e1,e2,e3和e4以及系統(tǒng)輸出變量N1o,M2o,M3o和M4o之間關(guān)系可表示如下:

圖3 PID控制的模擬加載系統(tǒng)方塊圖Fig.3 Block diagram of PID controlled analog loading system

由式(11)和式(12)得:

將矩陣A對角化并根據(jù)各環(huán)節(jié)具體參數(shù)求得解耦矩陣為

圖4 解耦控制的模擬加載系統(tǒng)方塊圖Fig.4 Block diagram of an analog loading system controlled by decoupling
將解耦矩陣與工控機(jī)邏輯控制程序構(gòu)成解耦控制系統(tǒng),通過上位機(jī)完成加載系統(tǒng)的解耦控制。
4 實(shí)驗(yàn)研究
為研究試驗(yàn)臺驅(qū)動轉(zhuǎn)速和輸出轉(zhuǎn)矩間的耦合干擾問題,驗(yàn)證解耦控制手段的有效性,參照圖1搭建模擬加載試驗(yàn)臺如圖5所示。
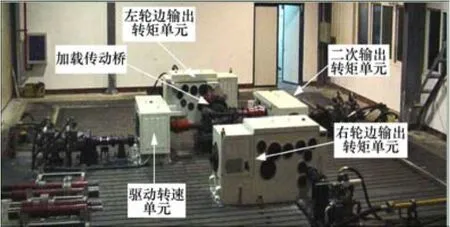
圖5 試驗(yàn)臺實(shí)物和實(shí)驗(yàn)現(xiàn)場Fig.5 Physical and experimental site of test rig
試驗(yàn)加載系統(tǒng)各單元前置級排量控制所用電液伺服閥和變量液壓缸主要參數(shù)如表1所示。
試驗(yàn)加載系統(tǒng)各單元所用二次元件參數(shù)相同,型號為力士樂A4VSO250 DS型,主要參數(shù)見表2。
試驗(yàn)臺加載系統(tǒng)各機(jī)械單元所用儀器規(guī)格一致,部分參數(shù)如表3所示。
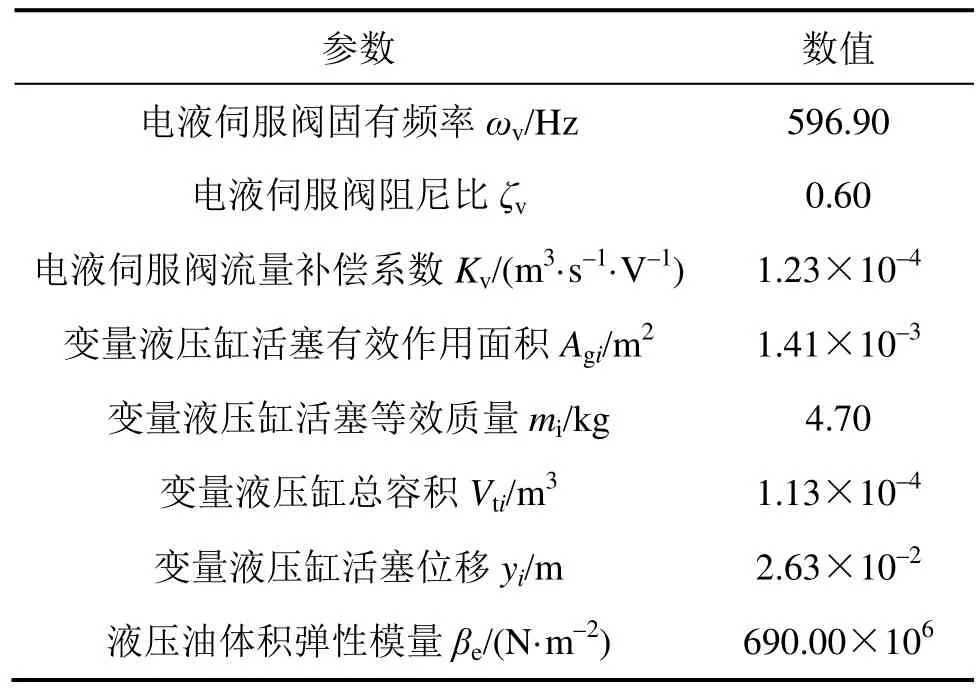
表1 前置級排量控制參數(shù)Table 1 Pre-stage displacement control parameters
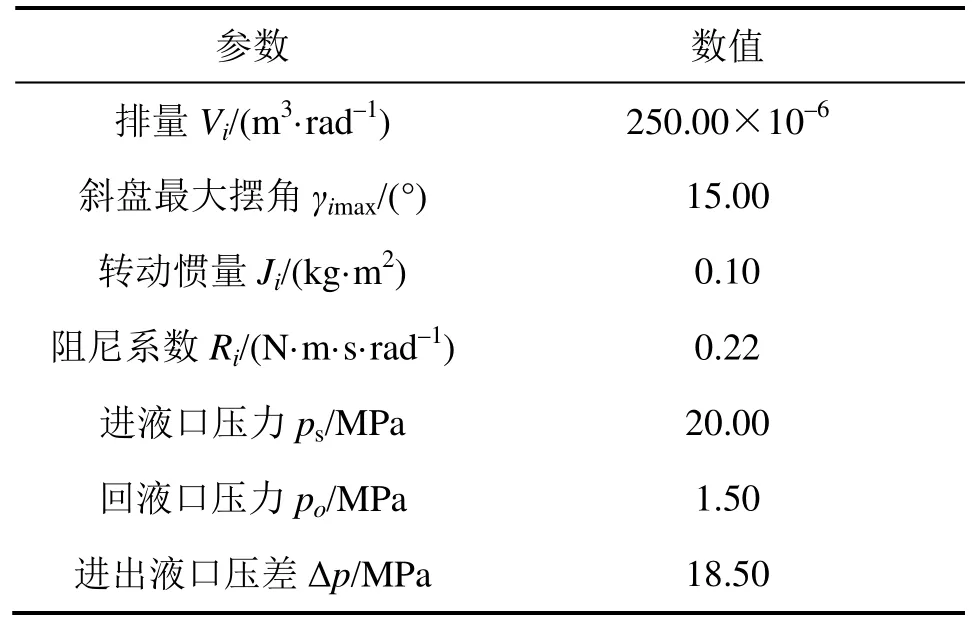
表2 二次元件參數(shù)Table 2 Secondary element parameters
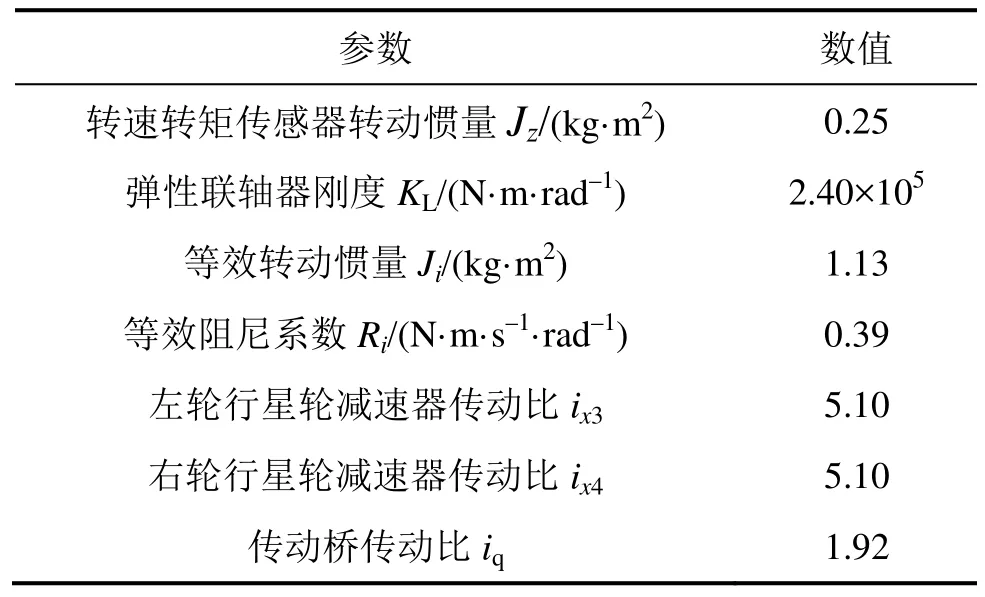
表3 加載機(jī)械系統(tǒng)參數(shù)Table 3 Loading mechanical system parameters
將表2和3中各參數(shù)輸入到上位機(jī)各環(huán)節(jié)的傳遞函數(shù)中,即可利用試驗(yàn)臺進(jìn)行相關(guān)實(shí)驗(yàn)。
4.1 耦合干擾實(shí)驗(yàn)
4.1.1 驅(qū)動轉(zhuǎn)速波動干擾實(shí)驗(yàn)
在試驗(yàn)臺計算機(jī)控制系統(tǒng)中,依次設(shè)置試驗(yàn)臺各加載參數(shù),在未引入解耦控制情況下,進(jìn)行驅(qū)動轉(zhuǎn)速正弦波動干擾實(shí)驗(yàn)。其中,驅(qū)動轉(zhuǎn)速正弦波動頻率依次設(shè)置為0.5,1.0和2.0 Hz,轉(zhuǎn)速幅值設(shè)置為60 r/min。實(shí)驗(yàn)結(jié)果曲線如圖6所示。圖6(a),(b)和(c)所示分別為3種頻率下驅(qū)動轉(zhuǎn)速波動對二次輸出轉(zhuǎn)矩、輪邊(左右相同)輸出轉(zhuǎn)矩的干擾實(shí)驗(yàn)曲線;圖6(d),(e)和(f)所示分別為3種頻率下二次輸出轉(zhuǎn)矩的誤差曲線;圖6(g),(h)和(i)所示分別為 3種頻率下輪邊輸出轉(zhuǎn)矩的誤差曲線。
由圖6可知:驅(qū)動轉(zhuǎn)速的波動導(dǎo)致二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩不同程度的波動,且驅(qū)動轉(zhuǎn)速波動頻率上升,二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩的波動誤差增加;當(dāng)驅(qū)動轉(zhuǎn)速波動頻率為0.5 Hz 時,二次輸出轉(zhuǎn)矩的最大波動誤差為15 N·m,輪邊輸出轉(zhuǎn)矩的最大波動誤差為7 N·m;2.0 Hz時,二次輸出轉(zhuǎn)矩的最大波動誤差為 30 N·m,輪邊輸出轉(zhuǎn)矩的最大波動誤差為13 N·m。
4.1.2 輸出轉(zhuǎn)矩波動干擾實(shí)驗(yàn)

圖6 驅(qū)動轉(zhuǎn)速波動干擾實(shí)驗(yàn)曲線Fig.6 Experimental curves of driving speed fluctuation interference
二次輸出轉(zhuǎn)矩與輪邊輸出轉(zhuǎn)矩均為系統(tǒng)輸出端,且對轉(zhuǎn)速的干擾情況相同,因此,以二次輸出轉(zhuǎn)矩為例,討論轉(zhuǎn)矩波動干擾對驅(qū)動轉(zhuǎn)速影響。
實(shí)驗(yàn)參數(shù)與驅(qū)動轉(zhuǎn)速波動干擾實(shí)驗(yàn)相同,二次輸出轉(zhuǎn)矩正弦波動頻率依次設(shè)置為0.5,1.0和2.0 Hz;幅值設(shè)置為 80 N·m。實(shí)驗(yàn)結(jié)果曲線如圖7所示。圖7(a),(b)和(c)所示分別為3種頻率下二次輸出轉(zhuǎn)矩波動對驅(qū)動轉(zhuǎn)速的干擾實(shí)驗(yàn)曲線;圖7(d),(e)和(f)所示分別為3種頻率下驅(qū)動轉(zhuǎn)速的誤差曲線。
由圖7可知:二次輸出轉(zhuǎn)矩以一定的頻率進(jìn)行波動時,驅(qū)動轉(zhuǎn)速將產(chǎn)生較大波動誤差。與驅(qū)動轉(zhuǎn)速波動干擾情況不同之處在于,二次輸出轉(zhuǎn)矩波動時,驅(qū)動轉(zhuǎn)速的波動誤差隨波動頻率的增加而減小。當(dāng)二次輸出轉(zhuǎn)矩波動頻率為0.5 Hz時,驅(qū)動轉(zhuǎn)速的最大波動誤差為18 r/min;二次輸出轉(zhuǎn)矩波動頻率為2.0 Hz時驅(qū)動轉(zhuǎn)速的最大波動誤差為15 r/min。
4.2 解耦控制實(shí)驗(yàn)
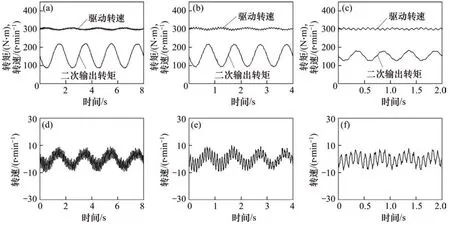
圖7 二次輸出轉(zhuǎn)矩波動干擾實(shí)驗(yàn)曲線Fig.7 Experimental curves of disturbance of secondary output torque ripple
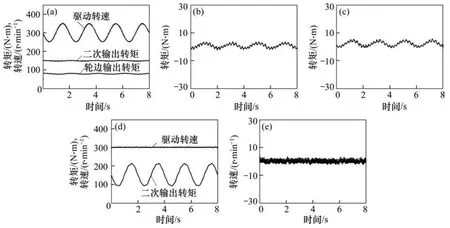
圖8 解耦控制實(shí)驗(yàn)曲線Fig.8 Experimental curves of decoupling control
為便于同未解耦時的干擾試驗(yàn)結(jié)果進(jìn)行比較,解耦實(shí)驗(yàn)的條件及參數(shù)與耦合干擾實(shí)驗(yàn)保持一致,取波動干擾為0.5Hz的情況進(jìn)行討論,引入解耦控制后的實(shí)驗(yàn)結(jié)果如圖8所示。圖8(a)所示為驅(qū)動轉(zhuǎn)速波動干擾下的解耦控制實(shí)驗(yàn)曲線;圖8(b)和(c)所示分別為解耦后二次輸出加載轉(zhuǎn)矩和輪邊加載轉(zhuǎn)矩的誤差曲線;圖8(d)所示為二次輸出轉(zhuǎn)矩波動干擾下的解耦控制實(shí)驗(yàn)曲線;圖8(e)所示為解耦后驅(qū)動轉(zhuǎn)速的誤差曲線。
由圖8可知:引入解耦控制后,二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩的最大波動誤差均控制在5 N·m,驅(qū)動轉(zhuǎn)速最大波動誤差控制在4 r/min。與未進(jìn)行解耦控制的實(shí)驗(yàn)結(jié)果進(jìn)行對比可知:二次輸出加載轉(zhuǎn)矩最大波動誤差減小 67%,輪邊加載轉(zhuǎn)矩最大波動誤差減小29%;驅(qū)動轉(zhuǎn)速最大波動誤差減小78%。
5 結(jié)論
1)通過耦合干擾實(shí)驗(yàn),輪橋模擬加載試驗(yàn)臺驅(qū)動轉(zhuǎn)速和輸出轉(zhuǎn)矩之間存在一定程度的耦合干擾,其主要表現(xiàn)為:驅(qū)動轉(zhuǎn)速的波動引起二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩不同程度的波動,當(dāng)驅(qū)動轉(zhuǎn)速的波動頻率增加時,二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩的波動誤差增加;輸出轉(zhuǎn)矩的波動引起驅(qū)動轉(zhuǎn)速產(chǎn)生較大的波動誤差;當(dāng)輸出轉(zhuǎn)矩波動頻率增加時,驅(qū)動轉(zhuǎn)速的波動誤差減小。
2)通過對試驗(yàn)臺驅(qū)動轉(zhuǎn)速和輸出轉(zhuǎn)矩進(jìn)行解耦控制,驅(qū)動轉(zhuǎn)速因輸出轉(zhuǎn)矩波動引起的最大波動誤差比解耦前減小78%;二次輸出轉(zhuǎn)矩和輪邊輸出轉(zhuǎn)矩因驅(qū)動轉(zhuǎn)速波動而引起的最大波動誤差比解耦前減小近67%和29%。利用對角矩陣對試驗(yàn)臺進(jìn)行解耦控制,大幅度減小了耦合干擾的影響,解耦效果有效,從而提高了試驗(yàn)臺的控制性能和穩(wěn)定性。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
