旋渦式水面垃圾清理裝置及其遠程監控系統設計
2019-06-13 03:12:38傅鵬有張校偉馮美玲
自動化與儀表 2019年5期
傅鵬有,羅 亮,吳 靜,張校偉,馮美玲
(西南科技大學 信息工程學院,綿陽621010)
我國在經濟高速增長的同時,水環境與水生態問題日益突出,水環境惡化對國民健康生活產生了嚴重影響和制約。尤其在城市景觀湖泊等小型水域的建設和維護過程中,由于水循環不佳,湖泊內的垃圾時常無法排走,不僅影響美觀和污染環境還易導致水性生物死亡[1]。因而水面垃圾的清理成為重要的環境治理問題,直接關系著整個生態系統的健康。
小型水域下的水面垃圾清理目前仍然以人工打撈垃圾和大型綜合清污船作業為主,前者勞動量大、工作效率低、周期長且具有一定安全隱患;后者結構復雜、體型龐大,在小型水域下行動不便且使用成本過高。為此文獻[2-4]設計了自主行駛的小型垃圾收集船,但是制造成本高,運輸及其使用較為麻煩。文獻[5]創新地提出了一種旋渦式的水面垃圾清理裝置,具有良好的創新意義和實用價值,但是尚不能與外網連接,只能本地控制,限制了裝置的使用距離。針對以上問題,本文以流體學、單片機控制、互聯網技術等作為理論基礎,設計了一套適用于小型水域的漩渦式水面垃圾清理裝置及其監控系統。該清理裝置具有結構簡單、使用方便、成本較低且自適應能力強的特點,能夠實現全天候打撈水面垃圾工作。同時,與互聯網技術結合,建立其云端服務器, 依托Android 移動智能終端實現了對于裝置的遠程監控。
1 總體設計方案
設計由上位機和下位機構成,上位機由云端服務器和Android 端軟件構成, 其架構框圖如圖1所示。上位機用于垃圾清理裝置狀態的遠程監控管理,判斷其垃圾清理裝置工作是否正常以及垃圾有無收集滿,以便于人工維修和及時清理裝置收集的垃圾。下位機為垃圾清理裝置,主要由裝置結構外體、電源模塊、無線通訊模塊、傳感器檢測模塊、驅動電路及水泵模塊構成, 其整體架構框圖如圖2所示。
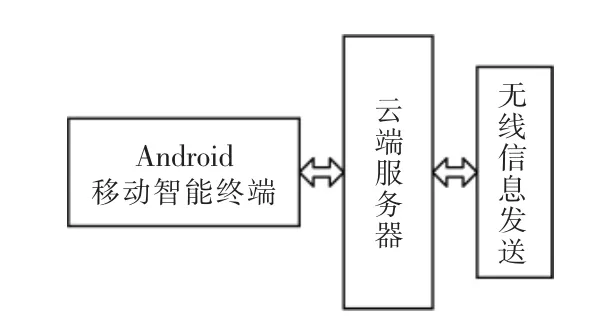
圖1 上位機架構框圖Fig.1 Architecture diagram of upper-computer

圖2 下位機裝置架構框圖Fig.2 Architecture diagram of lower-device
裝置工作懸浮于水體中,其體設有進水口。裝置通過液位檢測傳感器檢測當前液位并依此控制潛水泵排水流量,使得艙體內水平面與外界水平面形成固定液位差,由于引力作用,外界水流流入收集艙水流并形成漩渦。漂浮垃圾隨水流一同經進水口被吸入艙體內部的垃圾濾網,水體通過濾網后由水泵排出裝置外,垃圾留于收集艙內,以此實現垃圾與水體分離。如此反復循環,至收集艙收滿后自動上浮停止收集, 并反饋狀態信息顯示Android 智能終端。
2 清理裝置結構及模塊設計
2.1 清理裝置整體結構設計
裝置整體結構如圖3所示。裝置整體為圓柱形結構,由浮動平臺和艙體構成。浮動平臺提供裝置懸浮所需浮力,艙體由收集艙和主控艙2 個艙體組成。收集艙主要由過濾殼體構成,殼體為網狀結構,殼內可套設用于收集過濾垃圾后的垃圾濾網。主控艙內含鋰電池、STM32 主控板和無線通訊模塊等電子設備。主控艙內整體密封,以一真空管引出各線路,實現同外部外設通信。

圖3 裝置整體結構示意圖Fig.3 Structure diagram of the device
裝置浸入水中部分為對稱圓柱體,其整個艙壁所受壓力對稱,以微積分原理單位化拆分,相互抵消[6]。因此,控制水位差的關鍵在于控制水泵的排水速度以平衡進水量與出水量。經多次實驗,進水口位于水面下3 cm 處較佳, 過高垃圾收集效果不好,過低則進水量過大致使排水量響應增大引起電源電量損耗過快。
裝置正常工作時懸浮在水面具有一定水位高度,由于水流不斷流入,故由艙體提供的浮力可忽略,主要由密封的主控艙和浮臺提供浮力。根據參數計算:裝置、浮臺、鋰電池以及內置控制系統共計8.6 kg。主控艙為長方形結構,其長寬高分別為15 cm,15 cm,8 cm,由阿基米德浮沉定律,浸在液體里物體受到向上的浮力,浮力大小等于物體排開液體所受重力,取水密度為1.0×103kg/m3得:

可得,主控艙提供了1.8 kg 的浮力,因而為保證其正常工作時吃水深度,需要浮動平臺提供約6.8 kg的浮力。浮臺由高密度聚乙烯EPS 泡沫構成,主要分為3 個浮臺,固定于收集艙頂部,一方面提供裝置所需的浮力,一方面保證清理裝置的平衡,防止裝置因水浪而傾覆。
2.2 裝置控制系統
裝置控制系統主要由以電源、主控電路、無線通訊模塊、傳感器以及附屬電路構成,其結構圖如圖4所示。系統采用STM32F103C8T6 作為控制芯片,STM32F103C8T6 是基于Cortex-M3 架構內核的32 位處理器,擁有有3 路USART 通信接口,4 個16位定時器,每個定時器均可輸出4 路PWM 波,能夠滿足本設計的串口通信需求和對多路PWM 波輸出的控制[7]。
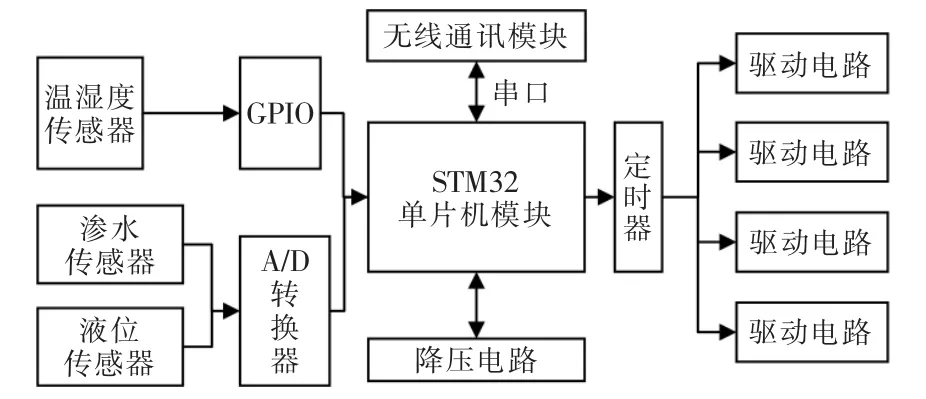
圖4 主控系統架構圖Fig.4 Architecture diagram of main control system
無線通訊模塊采用E35-V 模塊,該模塊是一款基于GSM/GPRS 網絡的嵌入式無線速傳模塊,采用串口通訊,具有網絡覆蓋范圍廣、可靠性高和運行成本低的特點。本設計中, 使用其模塊作為MQTT(message queuing telemetry transport)協議支撐,通過MQTT 建立與云端的無線數據通路。
傳感器包括滲水傳感器、溫濕度傳感器和液位傳感器, 滲水傳感器用于檢測主控艙是否滲水,溫濕度傳感器檢測艙內環境,液位傳感器用于檢測裝置吃水深度,以此進行抽水速度的調節。
2.3 水泵驅動電路設計
裝置由2 個放置位置對稱的水泵進行抽排水。水泵均為24 V 無刷直流潛水泵,為實現裝置收集垃圾滿后自動上浮,2 個水泵滿載流量大于其裝置并留有一定裕量。同時,為實現對水泵抽排水速度的控制,設計此驅動電路,如圖5所示。
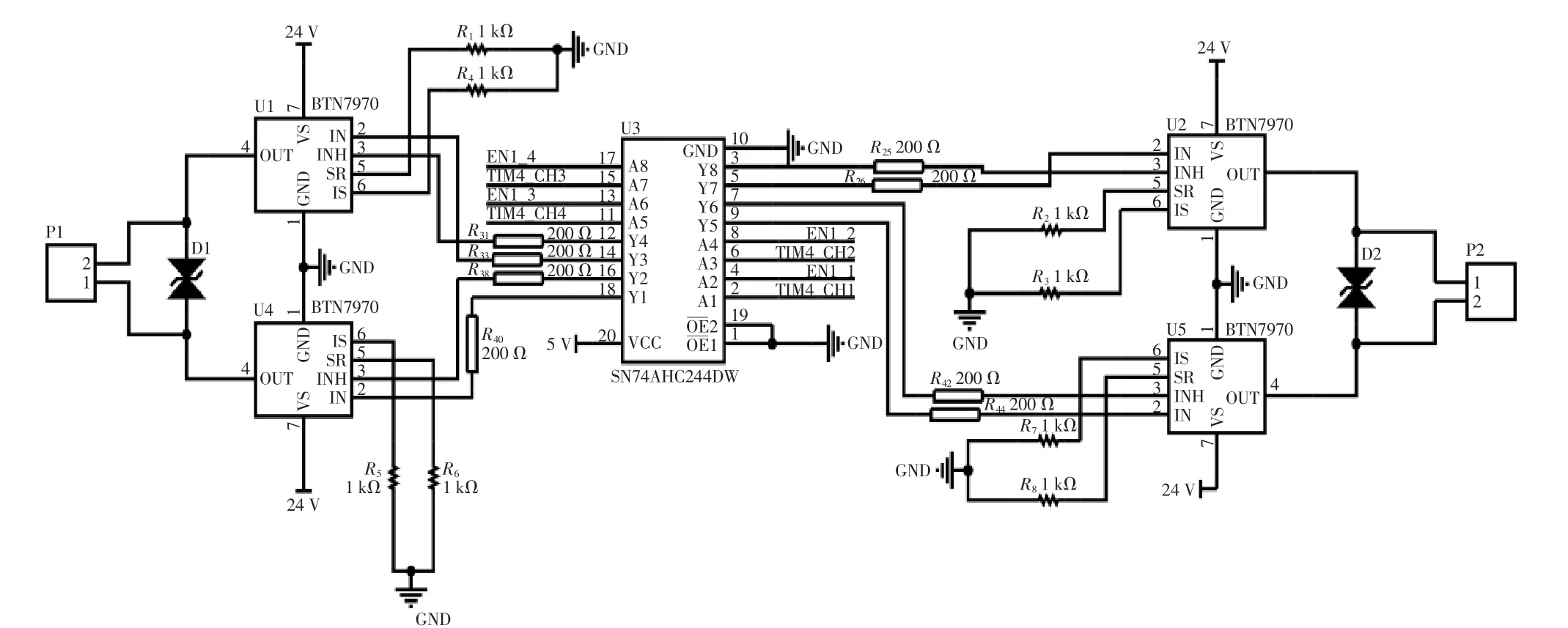
圖5 水泵驅動電路圖Fig.5 Schematic of the pump driver
設計采用BTN7970 驅動器對水泵進行驅動,BTN7970 是大功率H 半橋集成芯片,驅動信號PWM頻率為1~25 kHz,且具有過溫、過壓、過流和短路保護等診斷功能。為保護控制電路和驅動BTN7970 芯片, 設計采用SN74AHC244DW 高速COMS 同向三態緩沖器分別與水泵驅動器和控制電路相連接。同時,又在2 個水泵驅動芯片間加入雙向TVS 管對電路進行保護,免受各種浪涌脈沖的損壞。
3 軟件設計
3.1 裝置液位控制實現
裝置通過液位傳感器檢測其吃水深度,進而通過PWM 波調節水泵抽水速度, 從而使得抽水速度平衡其進水速度以維持其懸浮。其裝置控制工作流程如圖6所示。
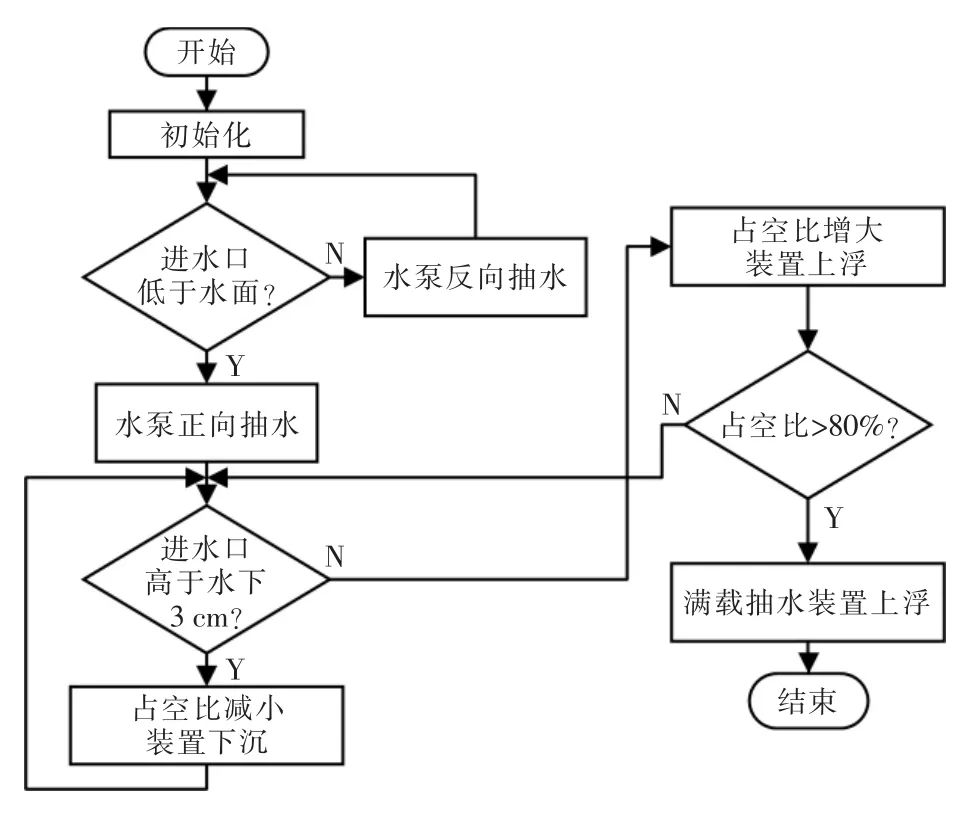
圖6 垃圾清理裝置控制流程Fig.6 Control flow chart of garbage cleaning device
在裝置剛放入水中時,液位傳感器此時高于水面,因此,控制水泵反向吸水,使得裝置下沉。液位傳感器檢測進水口到其水面時控制水泵開始工作,并逐步將其裝置進水口平穩在水下3 cm 以形成水位差,產生渦流將水和漂浮的垃圾一同卷入垃圾濾網中。伴隨裝置工作,艙體內垃圾逐步增多,裝置因此下沉,此時控制其PWM 波占空比逐步增大,擴大其水泵抽水流量, 重新平衡裝置至最佳收集水位。經過多次試驗,本設計中以占空比高到百分之八十時,判斷其裝置收集滿,此時水泵滿載抽水,抽水量大于入水量,裝置上浮,進水口高于水面,并將信息發送,并反饋狀態信息顯示Android 智能終端。
3.2 通訊實現
清理裝置與服務器通訊采用MQTT 協議,MQTT 協議是IBM 開發的即時通訊協議,該協議基于TCP/IP 協議,專為大量計算能力有限,且工作在低帶寬的物聯網設備開發[8]。MQTT 使用發布/訂閱消息模式,訂閱者訂閱話題,訂閱者能接受到所有該話題的信息,發布者發布話題,所有訂閱該話題的訂閱者均能接后話題信息。本設計中,由于移動終端只對清理裝置進行遠程監控, 而不進行控制。因此,清理裝置與云端為單向通訊鏈路,服務器只訂閱清理裝置發布的數據而不自己發布。
服務器與移動終端采用HTTP 建立鏈接, 為保證其網絡傳輸速度和便于機器解析,服務器與移動終端、清理裝置之間均采用JSON(JavaScript?Object Notation,JSON)格式進行通訊,JSON 是一種輕量級的數據交換格式,由名稱和值構成。具體數據格式如下:
{ "100001":[
{ "temperature":"24","humidity":"25" },
{ "flood":"0xDD","state":"56"},
]}
10001 為設備ID,由六位整形數構成,不同ID代表不同設備;temperature,humidity 分別代表溫度和濕度,值格式為0~100 的小數,其后面值代表當前密封艙內溫濕度值;flood 用于表示密封艙內是否進水,0xDD 代表未進水,0xFF 表示進水;state 代表裝置垃圾收集進度,值格式為0~100 的整數,由清理裝置PWM 波占空比換算得來,100 即為裝置以收集滿垃圾。
3.3 服務器結構設計
系統服務器主要負責接收垃圾清理裝置傳送的原始數據報文,并對數據進行處理后將其數據送至動智能終端顯示。服務器其可分為處理層和接口層,其功構圖如圖7所示。

圖7 服務器架構圖Fig.7 Architecture diagram of server
處理層依托MySQL 關系型數據庫,負責實時報文數據的解析、參數運算處理、用戶的登錄監控、各類數據的存儲。接口層負責與硬件端和移動終端建立通訊鏈路,實現裝置遠程監控。硬件端與云服務器基于MQTT 協議建立單向通路,移動智能終端基于HTTP 協議與服務器建立雙向通訊鏈路, 智能終端向服務器發起請求時, 相關請求信息直接放在HTTP 請求中, 而當服務器向智能終端返回數據的時候,則通過HTTP 協議返回JSON 格式數據。
3.4 移動智能終端軟件設計
考慮其平臺的開放性和開發環境的豐富性, 設計采用Android 系統作為支持平臺,其移動智能終端軟件主要由登錄和裝置監控界面構成,如圖8~圖10所示。
用戶界面實現用戶的登錄管理, 而清理裝置的監控是終端軟件的核心。終端軟件提供多裝置的同時監控功能, 每個裝置具有自己唯一的設備號和密碼,終端軟件從服務器獲取所有設備號和密碼匹配成功的裝置狀態信息并進行顯示, 以方便同一水域多清理裝置的統一監控。

圖8 用戶登錄界面Fig.8 User login interface

圖9 裝置注冊界面Fig.9 Device registration interface
圖10 裝置監控界面Fig.10 Device monitoring interface
4 結語
本文介紹了一種旋渦式的水面垃圾清理裝置及其遠程監控系統的設計與實現過程, 細述了裝置的結構組成、工作原理和各部分硬件電路設計,給出了遠程監控系統設計方案與系統各部分架構。該清理裝置成本低,地形適應能力強,適用于小型水域垃圾清理,其遠程監控系統使用便捷,能夠實現多清理裝置的同時在線遠程監控。該設計對水面垃圾清理系統的設計與運用具有一定的啟發和指導價值。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子測試(2017年11期)2017-12-15 08:57:07
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2015年2期)2015-02-28 12:15:41
自動化博覽(2014年12期)2014-02-28 22:34:27
