基于VISUM交通仿真和OD矩陣反推技術的交通預測模型研究
2019-06-13 01:31:38王中立重慶交通大學土木工程學院重慶400074
中國房地產業 2019年11期
文/王中立 重慶交通大學 土木工程學院 重慶 400074
張沈越 武漢理工大學 汽車工程學院 湖北武漢 430070
1、緒論
1.1 問題提出
交通需求預測,是交通規劃的核心內容之一[1]。早在上個世紀,西方發達國家在大規模城市道路交通規劃和建設過程中,逐漸形成了“四階段”城市道路需求預測技術。四階段(four-step)模型是指將需要完成的交通需求預測任務劃分為四個子任務,即交通產生量預測、OD分布預測、交通方式分擔預測和交通量分配預測。
“四階段”技術在長期的城市交通規劃實踐中得到了檢驗,自該方法誕生之日起,其框架幾乎沒有發生變動,方法簡單可靠,但“四階段”技術依賴大規模的城市交通普查,在當今城市人口流動極其頻繁的情況下,交通普查的成本和難度越來越大,其精度也不容樂觀。同時,其傳統預測模型難以反映社會發展,城市交通管理政策變化的影響,也無法考慮到周邊環境隨時間序列推移,對各交通小區出行的連鎖反應。
1.2 研究內容
文章對交通擁堵進行判定,闡述交通擁堵產生的原因,收集了目前應對交通擁堵的方法,介紹了現有交通運行狀況評價體系。同時,文章還對宏觀交通仿真技術進行闡述,介紹了宏觀交通仿真軟件VISUM,提出了OD矩陣反推與交通預測模型相結合的思路。
研究以VISUM交通仿真軟件上的Oppidum小鎮為研究樣本,將研究范圍按用地情況和道路的自然分割劃分為67個交通小區,查詢得到的1960-2000年城市主干道年交通量。通過對1960-1999年數據分析處理,預測出2000年交通量。
2、宏觀交通仿真機理
2.1 宏觀交通仿真的定義
根據研究范圍及對象的不同,交通仿真通常被分為宏觀交通仿真、中觀交通仿真和微觀交通仿真 [2]。
宏觀交通仿真要求采集路段速度和流量,相較于中觀交通仿真和微觀交通仿真,對交通實體、交通信號等細節要求比較低。在宏觀交通仿真過程中,研究者以OD矩陣為主要研究對象,對交通基礎設施建設和遠景規劃進行科學分析,如公交線路的優化、評價新建公路影響。
2.2 研究概況
交通仿真現狀的發展分成三個階段,20世紀60年代,研制了TRANSY、SIGOP等系統,但由于當時計算機發展不夠好,仿真系統也并不完備。后來,隨著計算機的發展,仿真模型迅速發展,出現了MISTRAN模型、SATURN宏觀模型等[3]。到20世紀80年代,ITS的研究熱潮襲來,各國相繼研制了各種不同,應對不同情況和路段的仿真模型。到目前,交通仿真系統分為宏觀和微觀,微觀的有CORSIM、PARAMICS和VISSIM,而宏觀的有VISUM。傳統的微觀分析方法適用的范圍、影響因素較小的情況,而宏觀的交通仿真軟件如VISUM以整體為目標,研究特定問題,分析路網情況,對交通流量進行分析分配,從而實現科學規劃,減少擁堵情況。VISUM現已經用于對于路網的分析,為城市道路的規劃提供依據[4]。
2.3 基于大數據交通仿真技術的城市交通量組合預測模型
交通仿真軟件的出現在很大程度上促進了交通的發展,是交通領域的一座里程碑。隨著社會的發展,影響交通的相關因素越來越多,應用計算機技術進行交通仿真就成為了一種很有效的技術手段。交通仿真不僅可以復現交通流時空變化的技術、為交通道路設計規劃提供技術依據,而且還可以對各種參數進行比較和評價,以及環境影響的評價等。但是,交通是一個很復雜,又很巨大的一個體系,由于軟件自身的局限性,往往在算法預測上不夠精確,對交通狀態的描述顯得不夠完善,因此,文章考慮將引入OD矩陣反推后的卡爾曼濾波模型應用于交通仿真軟件VISUM,提出一種解決交通擁堵問題的新思路[5]。
3、卡爾曼濾波預測模型
3.1 模型提出背景
卡爾曼濾波是一種高效率的遞歸濾波器,是一種建立在最小方差估計的基礎上的算法,利用線性系統狀態方程,輸入觀測數據,再對系統進行最優估計。[6]
3.2 算法詳述
將實際觀察到的交通量數據,經過一系列運算反推出歷史的OD矩陣,再運用卡爾曼濾波模型,運用方程對得到的OD矩陣進行處理,預測得到新的結果[7]。這樣就將卡爾曼濾波模型與交通量結合起來,實現對OD矩陣的處理和運用。
以極大熵OD反推模型:
對于上述極大熵模型,由于其目標函數的特殊性,直接求解難以進行,通常用拉格朗日乘子法將其化為如下非線性方程組的形式:
上述方程組是含有M+1個變量和M+1個方程的非線性方程組,通過求解上述未知數即拉格朗日乘子,然后由(1)式求出OD矩陣,則有下式:

對于上述線性方程求解,采用數值解法。
4、現狀交通分析
4.1 傳統方法
卡爾曼濾波模型在交通需求預測中的應用,首先要根據交通流量時間和空間的相關性選擇狀態變量的個數。其基本有五個公式,簡單介紹如下。

T表示協方差:

結合預測值和測量值,可以得到現在狀態(k)的最優化估算值V(k|k) :

Kg為卡爾曼增益:

現在,得到了k狀態下最優的估算值V(k|k)。為了使卡爾曼濾波器不斷的運行下去直到系統過程結束,還要更新k狀態下V(k|k) 的協方差即:

假設在k時刻某觀察點的車輛數與k-1、k-2時間段都有一定關系和聯系,根據這個關系,可以預測同一地點在k+1時刻的交通流[9]。

經過一系列處理和遞推可以得到:

得到對比結果(圖1):
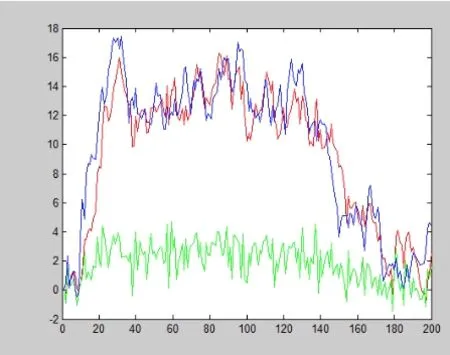
圖1 MATLAB圖像
其中,紅色為卡爾曼濾波,綠色為量測,藍色為狀態。得出根據卡爾曼濾波模型預測出的交通流量,再與實際流量對比,我們可以看出卡爾曼濾波模型對于預測的準確性和及時性情況[10]。通過加權計算絕對誤差,我們發現預測值與實際值有10.56%的誤差。
4.2 基于組合模型的交通分析
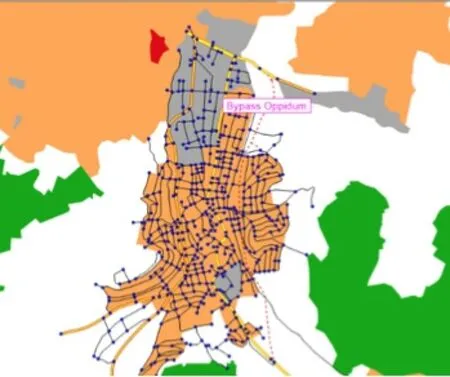
圖2 Oppidum小鎮路網圖
在VISUM軟件中,首先將Oppidum小鎮分為67個交通小區(圖2),并自動生成小區連接線,生成40個以極大熵OD反推模型為主要原理的OD反推矩陣,并存入數據庫,接著,將1960-1999年的Oppidum小鎮OD交通需求矩陣通過卡爾曼濾波交通需求預測,得出預測值,即2000年各路段交通量,與實際數據對比,通過加權平均算出絕對誤差為5.11%。
4.3 傳統四階段法與組合模型的比較
與傳統的"四階段"技術相比,以極大熵原理為基礎的OD反推算法與卡爾曼濾波模型相結合的方法的預測更加簡便和高效。同時,與真實值相比,傳統方法預測誤差為10.56%,文中組合模型誤差為5.11%,文中方法更加精確。
結論:
通過對傳統交通流量需求預測四階段法的改進,提出以歷史交通流量基礎,用VISUM軟件中Oppidum小鎮的數據,以極大熵模型反推出OD矩陣,再利用卡爾曼濾波模型對OD矩陣進行處理和預測,最后將預測出的OD矩陣輸入VISUM仿真軟件中進行重新分配。在新的預測方法中,將OD矩陣反推的極大熵模型和卡爾曼濾波模型結合起來,形成更優的組合模型,省去了傳統方法中大量的交通調查,節省大量物力財力和時間,同時還提高了預測精度。本文提出的方法在精準性、可靠性、簡便性、可行性方面都有一定優勢,為今后更加有效的規劃交通,更簡便、精準的解決城市擁堵問題提供理論基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
