一種高速重載碼垛機(jī)器人誤差分析
2019-06-24 12:28:36萬(wàn)英和吳連松饒金海武冰昕
制造業(yè)自動(dòng)化 2019年2期
關(guān)鍵詞:影響
吳 振,萬(wàn)英和,吳連松,饒金海,武冰昕
(1.北京機(jī)械工業(yè)自動(dòng)化研究所有限公司,北京 100120;2.北京萬(wàn)集科技股份有限公司,北京 100193)
0 引言
國(guó)產(chǎn)碼垛機(jī)器人經(jīng)過(guò)多年發(fā)展雖然取得了顯著的成果,但是在末端定位精度上與國(guó)外碼垛機(jī)器人相比還是有一定的差距,提高機(jī)器人末端定位精度主要途徑是進(jìn)行誤差補(bǔ)償,而誤差補(bǔ)償?shù)睦碚摶A(chǔ)是建立機(jī)器人末端位姿誤差模型[1~3]。國(guó)內(nèi)外許多學(xué)者在該領(lǐng)域做了大量的研究工作,并取得了許多成果[4~6]。童上高[4]等人,基于攝動(dòng)法對(duì)沃迪公司的TPR-120/200碼垛機(jī)器人進(jìn)行了定位誤差分析,并提出了各個(gè)可能引起末端位置誤差的因素以及相應(yīng)的誤差補(bǔ)償算法。寧鳳艷[5]等人同樣基于攝動(dòng)法對(duì)MJR混聯(lián)碼垛機(jī)器人進(jìn)行了誤差分析,建立了其位姿誤差模型,通過(guò)數(shù)值仿真分析了結(jié)構(gòu)偏差,這種分析思路可以作為常用機(jī)器人誤差分析方法。
本文基于D-H參數(shù)法建立碼垛機(jī)器人構(gòu)件間誤差傳遞函數(shù)和手腕體末端位姿誤差模型。綜合考慮各個(gè)可能引起末端位姿誤差的因素,從中提取對(duì)定位誤差影響較顯著的因素,研究其對(duì)位姿誤差的具體影響,為碼垛機(jī)器人加工、裝配過(guò)程提供理論依據(jù)。分析機(jī)器人結(jié)構(gòu)參數(shù)誤差一定時(shí),機(jī)器人末端位置誤差隨驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角的變化規(guī)律,之后研究了在重力作用下驅(qū)動(dòng)關(guān)節(jié)柔性與桿件柔性對(duì)于末端誤差的影響,并對(duì)不同位姿下的末端誤差進(jìn)行了計(jì)算。
1 建立碼垛機(jī)器人誤差模型
1.1 D-H參數(shù)法建模
基于D-H參數(shù)法[7],建立碼垛機(jī)器人坐標(biāo)系,如圖2所示。其中靜坐標(biāo)系O0-X0Y0Z0固定在機(jī)架上,關(guān)節(jié)連接處建立各動(dòng)坐標(biāo)系,其中Zi軸均沿關(guān)節(jié)軸線方向,Xi定義為由Zi-1軸指向Zi軸方向。

圖1 碼垛機(jī)器人三維示意圖

圖2 基于D-H參數(shù)法的碼垛機(jī)器人坐標(biāo)系
構(gòu)件結(jié)構(gòu)參數(shù)以及理論值如表1所示,其中q1、q2、q3、q4分別表示腰座、大臂、小臂、手腕體四個(gè)驅(qū)動(dòng)關(guān)節(jié)處的轉(zhuǎn)角,同時(shí)。

表1 機(jī)器人各構(gòu)件結(jié)構(gòu)參數(shù)及其理論值
根據(jù)D-H建模法得末端抓手位姿矩陣為:

末端抓手靜坐標(biāo)系下位姿向量N為:



2.2 碼垛機(jī)器人誤差模型
碼垛機(jī)器人各構(gòu)件的加工、裝配誤差,機(jī)械傳動(dòng)誤差等因素會(huì)導(dǎo)致各構(gòu)件運(yùn)動(dòng)變量與結(jié)構(gòu)參數(shù)產(chǎn)生誤差,即:,進(jìn)而最終影響末端手腕體的位姿誤差。
相鄰兩構(gòu)件之間的姿態(tài)變化矩陣對(duì)各結(jié)構(gòu)參數(shù)的偏導(dǎo),即位姿變換矩陣對(duì)θi、αi、ai、di偏導(dǎo)數(shù)為:


設(shè)ki1、ki2、ki3、ki4分別表示碼垛機(jī)器人各構(gòu)件的運(yùn)動(dòng)變量和結(jié)構(gòu)參數(shù)碼垛機(jī)器人末端的位姿矩陣對(duì)于kij(i=1,2,3,4,5;j=1,2,3,4)的偏導(dǎo)數(shù)可以表示為:
在靜坐表系下的位置姿態(tài)誤差,可以用向量ΔN表示:

上式中,Δx、Δy、Δz為位置誤差,Δα、Δβ、Δγ為姿態(tài)誤差。結(jié)合姿態(tài)變化矩陣的偏導(dǎo)函數(shù)式(7)可得,位置誤差函數(shù)與姿態(tài)誤差函數(shù):


至此,便得到了碼垛機(jī)器人誤差模型,基于碼垛機(jī)器人誤差模型可以對(duì)機(jī)器人各結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量的誤差對(duì)機(jī)器人末端姿態(tài)誤差的影響進(jìn)行分析。
2 碼垛機(jī)器人靜態(tài)誤差分析
本文重點(diǎn)研究零件制造、安裝、機(jī)械傳動(dòng)誤差造成的影響。暫不考慮重力、溫度造成的零件變形誤差與控制系統(tǒng)誤差。在分析碼垛機(jī)器人靜態(tài)誤差時(shí)假設(shè)機(jī)器人各構(gòu)件均是純剛體,忽略構(gòu)件柔性與關(guān)節(jié)柔性對(duì)于末端變形的影響。本文主要考慮由于腰座、大臂、小臂、手腕體的加工、裝配以及機(jī)械傳動(dòng)等因素造成的誤差。此外姿態(tài)保持架與大臂連桿1和大臂連桿2的加工與安裝誤差也會(huì)造成末端位置姿態(tài)誤差產(chǎn)生影響,本文重點(diǎn)考慮由于姿態(tài)保持架及相應(yīng)連桿加工與安裝誤差對(duì)末端造成的平面度誤差Δβ。
2.1 機(jī)器人末端位置誤差分析
腰座、大臂、小臂、手腕體的加工、裝配以及機(jī)械傳動(dòng)等因素造成的機(jī)器人末端位置誤差,主要體現(xiàn)在各構(gòu)件結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量參數(shù)誤差造成的機(jī)器人末端位置誤差。在各構(gòu)件結(jié)構(gòu)與運(yùn)動(dòng)變量參數(shù)一定的情況下,隨著驅(qū)動(dòng)關(guān)節(jié)角度變化,機(jī)器人末端位置誤差也會(huì)隨之變化。因此本節(jié)主要研究固定位姿下各構(gòu)件結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量參數(shù)的誤差對(duì)末端位置誤差的影響,以及在結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量參數(shù)誤差一定的情況下隨著機(jī)器人驅(qū)動(dòng)關(guān)節(jié)(大臂、小臂驅(qū)動(dòng)關(guān)節(jié))角度的變化,機(jī)器人末端誤差的變化規(guī)律。
1)考慮各構(gòu)件結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量對(duì)末端位置誤差的影響。
首先給定碼垛機(jī)器人位姿,設(shè)大臂驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角為45°,小臂驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角為135°,腰座驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角為0°。本文研究中為單一變量的誤差對(duì)機(jī)器人末端位置誤差的影響。
考慮腰座與機(jī)架關(guān)節(jié)處的3個(gè)結(jié)構(gòu)參數(shù)α1、a1、d1與1個(gè)運(yùn)動(dòng)變量參數(shù)θ1存在的誤差對(duì)末端位置誤差的影響。首先分析腰座與機(jī)架關(guān)節(jié)處加工誤差造成的a1與d1對(duì)末端位置誤差的影響,如圖3所示,其對(duì)末端位置誤差沒(méi)有放大效應(yīng),只是單純的等比例誤差影響。其次考慮由腰座加工與裝配過(guò)程中產(chǎn)生的同軸度誤差引起的Δα1以及腰座驅(qū)動(dòng)關(guān)節(jié)誤差引起的Δθ1對(duì)末端位置誤差的影響,如圖4所示。

圖3 Δa1、Δd1對(duì)末端位置誤差的影響
對(duì)于大臂與腰座關(guān)節(jié)、大臂與小臂關(guān)節(jié)、小臂與手腕體關(guān)節(jié)、手腕體與抓手關(guān)節(jié)處存在的其余16個(gè)結(jié)構(gòu)與運(yùn)動(dòng)變量參數(shù)αi、ai、di、θi(i=2,3,4,5),在的其余16個(gè)結(jié)構(gòu)與運(yùn)動(dòng)變量參數(shù)αi、ai、di、θi(i=1,2,3,4)對(duì)末端位置誤差的影響,其分析方法與α1、a1、d1、θ1相同。限于文章篇幅有限,只分析某些對(duì)末端誤差影響較大的參數(shù)。


圖4 Δ1θ、Δ1α對(duì)末端位置誤差的影響
腰座與大臂關(guān)節(jié)處,由于腰座加工與腰座、大臂裝配過(guò)程產(chǎn)生的同軸度誤差a2、Δθ2經(jīng)大臂、小臂桿件放大作用后,對(duì)機(jī)器人末端位置Y軸方向誤差產(chǎn)生較大影響,其影響規(guī)律如圖5所示,對(duì)X軸與Z軸方向誤差影響非常微小。由于腰座加工誤差造成的a2與d2對(duì)末端位置誤差沒(méi)有放大效應(yīng),只是單純的等比例誤差影響。
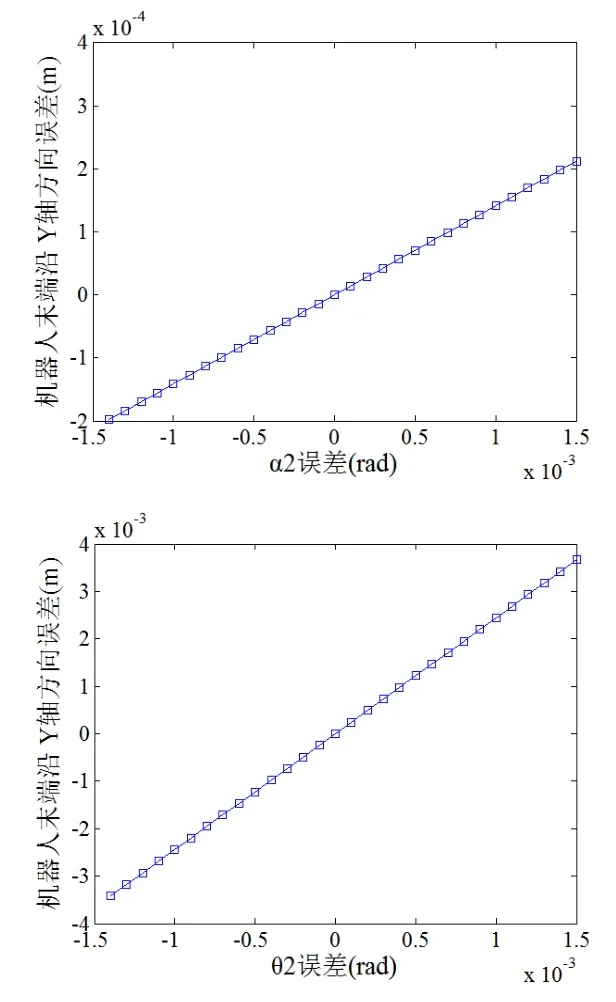
圖5 Δ2α、Δ2θ對(duì)機(jī)器人末端沿Y軸方向誤差的影響
對(duì)大臂與小臂關(guān)節(jié)處,大臂與小臂關(guān)節(jié)處由于大臂加工過(guò)程與大臂、小臂裝配過(guò)程產(chǎn)生的同軸度誤差a3經(jīng)小臂桿件放大作用后,對(duì)機(jī)器人末端位置Y軸方向誤差產(chǎn)生較大影響,如圖6所示。大臂與小臂關(guān)節(jié)處的運(yùn)動(dòng)變量誤差(驅(qū)動(dòng)關(guān)節(jié)產(chǎn)生的誤差)Δθ3經(jīng)小臂桿件放大作用后,對(duì)機(jī)器人末端位置X軸與Z軸方向誤差均會(huì)產(chǎn)生一定的影響,如圖6所示。大臂加工誤差造成的d3對(duì)末端位置誤差沒(méi)有放大效應(yīng),只是單純的等比例誤差影響。
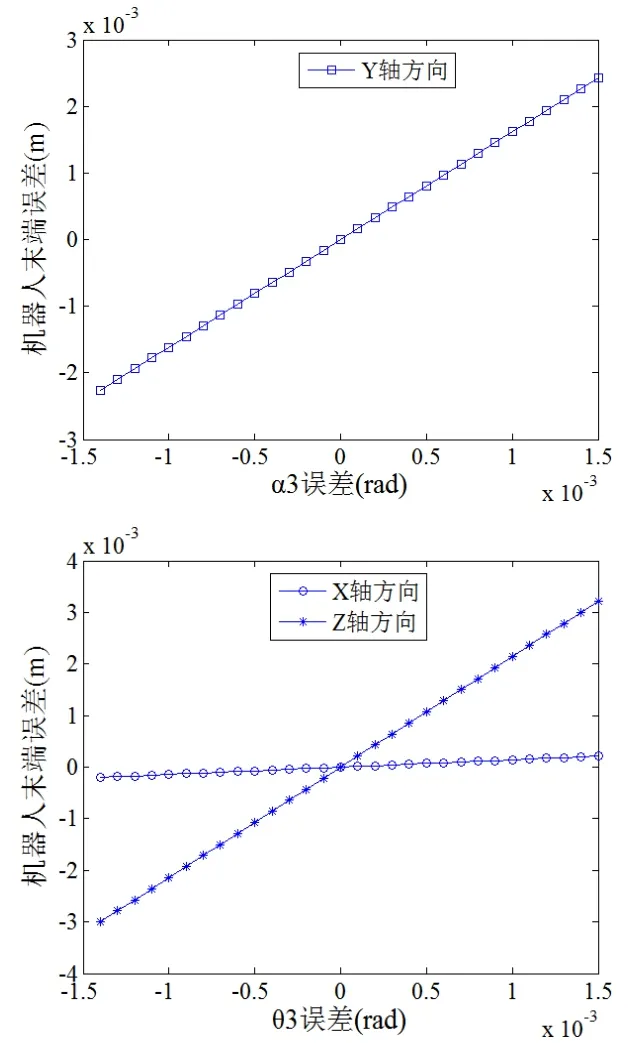
圖6 Δ3α、Δ3θ對(duì)機(jī)器人末端誤差的影響
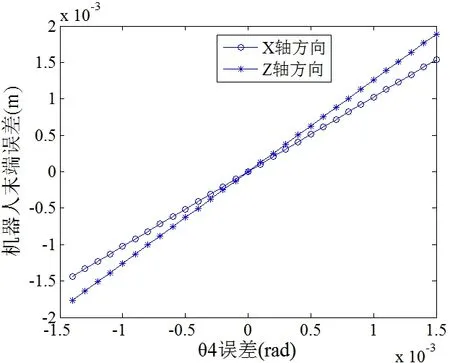

圖7 Δ4θ對(duì)機(jī)器人末端誤差的影響
考慮手腕體與抓手關(guān)節(jié)處的3個(gè)結(jié)構(gòu)參數(shù)α5、a5、d5與θ5對(duì)末端位置誤差的影響。由手腕體與末端抓手連接處加工誤差引起的a5與d5對(duì)末端位置誤差沒(méi)有放大效應(yīng),只是單純的等比例誤差影響。由加工過(guò)程與裝配過(guò)程中產(chǎn)生的同軸度誤差引起的a5與Δθ5對(duì)末端位置誤差很小,此處不再討論。
2)考慮各驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角對(duì)末端位置誤差的影響:
在各構(gòu)件結(jié)構(gòu)參數(shù)誤差一定的情況下,考慮不同位置(各驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角不同)時(shí),末端誤差隨驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角的變化規(guī)律。給定各構(gòu)件結(jié)構(gòu)參數(shù)誤差:設(shè)ai、di的位移誤差為0.05mm,設(shè)iα、θi的角度誤差為0.5°。碼垛機(jī)器人四個(gè)驅(qū)動(dòng)關(guān)節(jié)中,腰座與手腕體驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角變化對(duì)末端位置誤差沒(méi)有影響。大臂、小臂驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角對(duì)末端位置沿Y軸方向誤差影響成簡(jiǎn)單的線性關(guān)系,即隨著碼垛點(diǎn)距離機(jī)架位置越遠(yuǎn),其末端位置沿Y軸方向誤差越大;大臂小臂驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角變化對(duì)末端位置沿X軸與Z軸誤差影響較為復(fù)雜。其影響規(guī)律如圖8所示。

圖8 大臂與小臂轉(zhuǎn)角對(duì)末端位置誤差的影響
由圖8可以看出,在小臂轉(zhuǎn)角一定時(shí),隨著大臂轉(zhuǎn)角q2從0rad到2.4rad變化,末端Z軸方向誤差先增大后減小,X軸方向誤差線減小后增大;在大臂轉(zhuǎn)角一定時(shí),隨著小臂轉(zhuǎn)角q3從0.6rad到3.2rad變化,末端Z軸方向誤差先一直減小,X軸方向誤差線增大后減小;碼垛機(jī)器人在大小臂運(yùn)動(dòng)過(guò)程中,其末端Z軸方向最大誤差為7.68mm,其末端X軸方向最大誤差為3.85mm。
2.2 機(jī)器人末端姿態(tài)誤差分析
1)主要構(gòu)件結(jié)構(gòu)參數(shù)與運(yùn)動(dòng)變量誤差對(duì)末端姿態(tài)誤差的影響
由腰座加工與裝配過(guò)程中產(chǎn)生的同軸度誤差引起的Δα1,會(huì)對(duì)機(jī)器人末端沿X軸轉(zhuǎn)動(dòng)方向產(chǎn)生等效的誤差Δα,對(duì)機(jī)器人末端沿Y軸與Z軸轉(zhuǎn)動(dòng)方向誤差沒(méi)有影響,如圖9所示。由腰座驅(qū)動(dòng)關(guān)節(jié)誤差引起的Δθ1對(duì)末端位置誤差的影響會(huì)對(duì)機(jī)器人末端沿Z軸轉(zhuǎn)動(dòng)方向產(chǎn)生等效的誤差,對(duì)機(jī)器人末端沿X軸與Y軸轉(zhuǎn)動(dòng)方向誤差沒(méi)有影響,如圖9所示。
在以改善生存條件和促進(jìn)轉(zhuǎn)型發(fā)展為特征的一系列試點(diǎn)示范基礎(chǔ)上,隨著我國(guó)經(jīng)濟(jì)社會(huì)發(fā)展和社會(huì)福利改進(jìn)需求的調(diào)整,我國(guó)可持續(xù)城市建設(shè)逐漸從關(guān)注生存環(huán)境、經(jīng)濟(jì)轉(zhuǎn)型發(fā)展等議題向關(guān)注社會(huì)的公平、人的發(fā)展公平以及社會(huì)與環(huán)境的協(xié)同發(fā)展方向轉(zhuǎn)型,可持續(xù)城市關(guān)注的議題更加綜合,更注重人與社會(huì)、人與自然、社會(huì)與自然的協(xié)調(diào)發(fā)展。

圖9 Δ1α、Δ1θ對(duì)機(jī)器人末端姿態(tài)誤差的影響
對(duì)于大臂與腰座關(guān)節(jié)、大臂與小臂關(guān)節(jié)、小臂與手腕體關(guān)節(jié)、手腕體與抓手關(guān)節(jié)處存在的其余8個(gè)結(jié)構(gòu)與運(yùn)動(dòng)變量參數(shù)ai、θi(i=2,3,4,5)對(duì)末端姿態(tài)誤差的影響,其分析方法與a1、θ1相同。
2)姿態(tài)保持架系統(tǒng)造成的姿態(tài)誤差
碼垛機(jī)器人結(jié)構(gòu)簡(jiǎn)圖,如圖10所示。平行四邊形ABFI與平行四邊形BCDE的作用是保持手腕體下表面始終與地面平行。因此姿態(tài)保持架與姿態(tài)保持桿的加工與安裝誤差會(huì)造成的末端手腕體的平面度誤差,即β。另外,姿態(tài)保持架與相應(yīng)連桿的加工與安裝誤差也會(huì)對(duì)a、產(chǎn)生一定影響,因其影響較小,本文暫不考慮。

圖10 機(jī)器人結(jié)構(gòu)簡(jiǎn)圖
考慮大臂連桿2與腰座連接處的I點(diǎn)加工位置或者安裝位置誤差對(duì)于手腕體末端平面度誤差的β影響:設(shè)I為理論坐標(biāo)點(diǎn),設(shè)加工或者裝配過(guò)程造成I點(diǎn)產(chǎn)生誤差到I’點(diǎn),根據(jù)桿長(zhǎng)不變?cè)恚梢郧蟮肍點(diǎn)的坐標(biāo):

由F點(diǎn)與B點(diǎn)坐標(biāo)可以求解姿態(tài)偏差角:

上式中:θ表示AI連線與X軸的夾角(銳角)。
同理,可以求解由于F、E、D點(diǎn)處的加工位置或者安裝位置誤差對(duì)于手腕體末端平面度誤差的β影響。
3 重力對(duì)機(jī)器人末端誤差的影響
在前面分析機(jī)器人靜態(tài)誤差時(shí),為了方便分析桿件單一結(jié)構(gòu)參數(shù)對(duì)機(jī)器人末端位置姿態(tài)誤差的影響,并沒(méi)有考慮桿件以及關(guān)節(jié)的柔性。工程實(shí)踐表明,碼垛機(jī)器人在大負(fù)載情況下,重力造成的末端位置誤差較大,不可忽略,因此本節(jié)重點(diǎn)研究重力造成的末端誤差。在研究重力對(duì)碼垛機(jī)器人末端誤差的影響時(shí),將機(jī)器人桿件作為柔性桿件,并且考慮驅(qū)動(dòng)關(guān)節(jié)的柔性。
由碼垛機(jī)器人整機(jī)運(yùn)動(dòng)微分方程[8,9]可得,靜態(tài)下(各驅(qū)動(dòng)關(guān)節(jié)角速度、角加速度為零)機(jī)器人在重力作用下的變形可以表示為:

其中:[K]表示291×291的系統(tǒng)剛度矩陣;{q}表示291×1的系統(tǒng)節(jié)點(diǎn)彈性位移;[G]表示系統(tǒng)所受的重力;
在重力作用下,碼垛機(jī)器人末端沿靜坐標(biāo)系X軸方向誤差以及沿Z軸方向誤差可以表示為(設(shè)腰座驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角位零):

上式中:{q}67表示系統(tǒng)節(jié)點(diǎn)廣義坐標(biāo)系第67個(gè)坐標(biāo)的彈性位移;{q}69表示系統(tǒng)節(jié)點(diǎn)廣義坐標(biāo)系第69個(gè)坐標(biāo)的彈性位移;
碼垛機(jī)器人系統(tǒng)剛度矩陣是與大臂、小臂轉(zhuǎn)角有關(guān)的函數(shù)矩陣,系統(tǒng)剛度矩陣會(huì)隨著大臂與小臂轉(zhuǎn)角的變化而變化,即機(jī)器人在重力作用下末端誤差會(huì)隨著大臂與小臂轉(zhuǎn)角變化而變化。在給定機(jī)器人各構(gòu)件參數(shù)下,結(jié)合式(13)與式(14)可以求得不同驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角時(shí),重力對(duì)末端位置誤差的影響。隨著大臂轉(zhuǎn)角、小臂轉(zhuǎn)角的變化,重力對(duì)機(jī)器人末端沿靜坐標(biāo)系X軸方向與Z方向的誤差影響如圖11所示。
由圖11分析可知,在大臂轉(zhuǎn)角一定時(shí),隨著小臂轉(zhuǎn)角的增大,機(jī)器人沿Z軸方向誤差先增大后減小;沿X軸方向誤差,在機(jī)器人末端達(dá)到最遠(yuǎn)點(diǎn)之前,隨著小臂轉(zhuǎn)角的增大而增大,達(dá)到最遠(yuǎn)點(diǎn)之后,隨著小臂轉(zhuǎn)角的增大,沿X軸方向誤差先減小后增大。

圖11 重力造成的末端誤差與大臂、小臂轉(zhuǎn)角之間的關(guān)系
4 結(jié)論
本文主要對(duì)碼垛機(jī)器人誤差進(jìn)行了分析,基于D-H參數(shù)法建立了碼垛機(jī)器人誤差傳遞函數(shù);對(duì)機(jī)器人靜態(tài)誤差進(jìn)行分析,重點(diǎn)研究了各構(gòu)件結(jié)構(gòu)參數(shù)對(duì)末端位置誤差的影響,并對(duì)末端位置誤差與關(guān)節(jié)轉(zhuǎn)角的關(guān)系進(jìn)行了分析。對(duì)機(jī)器人末端姿態(tài)誤差,進(jìn)行了研究,并對(duì)主要構(gòu)件造成的誤差影響進(jìn)行了分析與討論;建立了碼垛機(jī)器人大臂、小臂靜態(tài)驅(qū)動(dòng)動(dòng)力數(shù)學(xué)模型。對(duì)重力造成的末端誤差,尤其是重力影響下導(dǎo)致大臂、小臂驅(qū)動(dòng)關(guān)節(jié)轉(zhuǎn)角誤差對(duì)末端位置誤差的影響進(jìn)行了分析。為對(duì)應(yīng)誤差補(bǔ)償提供了理論基礎(chǔ)。
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(shù)(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國(guó)塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2016年3期)2016-02-27 16:15:49
現(xiàn)代檢驗(yàn)醫(yī)學(xué)雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學(xué)低年級(jí)版)(2011年3期)2011-01-01 00:00:00
