離子束刻蝕機電控系統設計許釗
2019-06-24 06:23:22薛鵬
科技創新與應用 2019年13期
薛鵬

摘 ?要:運動控制系統是實現離子束刻蝕機控制算法和軌跡擬合算法的硬件基礎,因此需要在傳動運動控制系統上,進行進一步的研究,以滿足離子束刻蝕機刻蝕閃耀曲面光柵的要求,文章按照離子束刻蝕機運動控制系統的功能要求設計了工作平臺的電控系統,首先介紹了電控系統的結構和功能模塊布置,之后分別對電控系統的四個主要功能模塊的軟件和硬件電路進行設計,分別為:供電模塊、真空獲得模塊、運動控制模塊、通訊模塊。為實現離子束刻蝕機控制算法和軌跡擬合算法提供了實際實驗平臺基礎。
關鍵詞:步進電機;硬件設計;運動控制
中圖分類號:TP273 ? ? ? ? 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2019)13-0095-02
Abstract: The motion control system is the hardware basis to realize the control algorithm and trajectory fitting algorithm of ion beam etching machine. therefore, further research needs to be carried out on the transmission motion control system to meet the requirements of ion beam etching machine etching blazed surface gratings. In this paper, the functional requirements of the motion control system of ion beam etching machine are studied. the electronic control system of the working platform is designed. Firstly, the structure and functional module arrangement of the electronic control system are introduced. Then, the software and hardware circuits of the four main functional modules of the electronic control system are designed, which are: power supply module, vacuum acquisition module, motion control module, communication module. It provides a practical experimental platform for the realization of ion beam etching machine control algorithm and trajectory fitting algorithm.
Keywords: stepping motor; hardware design; motion control
1 供電模塊
由于整個系統中有眾多電子設備同時工作,根據以往經驗各個設備的上電應嚴格按照一定的先后順序進行,包括真空泵組的工作電源及控制系統工作臺需要的工作電壓(+5V,+24V等),以避免因為上電順序的錯誤造成系統工作不穩定等潛在的危險情況出現。
運行模式的切換主要是針對真空獲得部分。對于真空獲得其存在兩種運行模式,即手動模式和自動模式。在自動模式下真空泵組根據程序設定好的條件運行,無需操作人員進行任何操作即可以形成及保持真空。手動模式操作情況下,真空獲得的主控單元(PLC模塊)不起作用,真空的形成和保持完全由操作人員在1號機柜提供的手動控制模版上進行,其各種狀態信息的反饋完全由操場人員完成。
2 真空獲得模塊
真空獲得主要是電控系統與真空泵組的電氣控制接口及真空形成保持流程的執行單元。該部分主要介紹真空形成保持的流程,控制模塊與真空泵組的電氣接口設計。
從實際應用情況出發,要求真空聯鎖的控制實現以下幾個目標:(1)可以嚴格按照真空聯鎖的流程完成真空的
形成和保持。(2)當系統的主控軟件及其它部分停止工作時,真空聯鎖控制仍能可靠安全的保證系統真空。(3)可以在自動和手動兩種模式下切換。
3 運動控制模塊
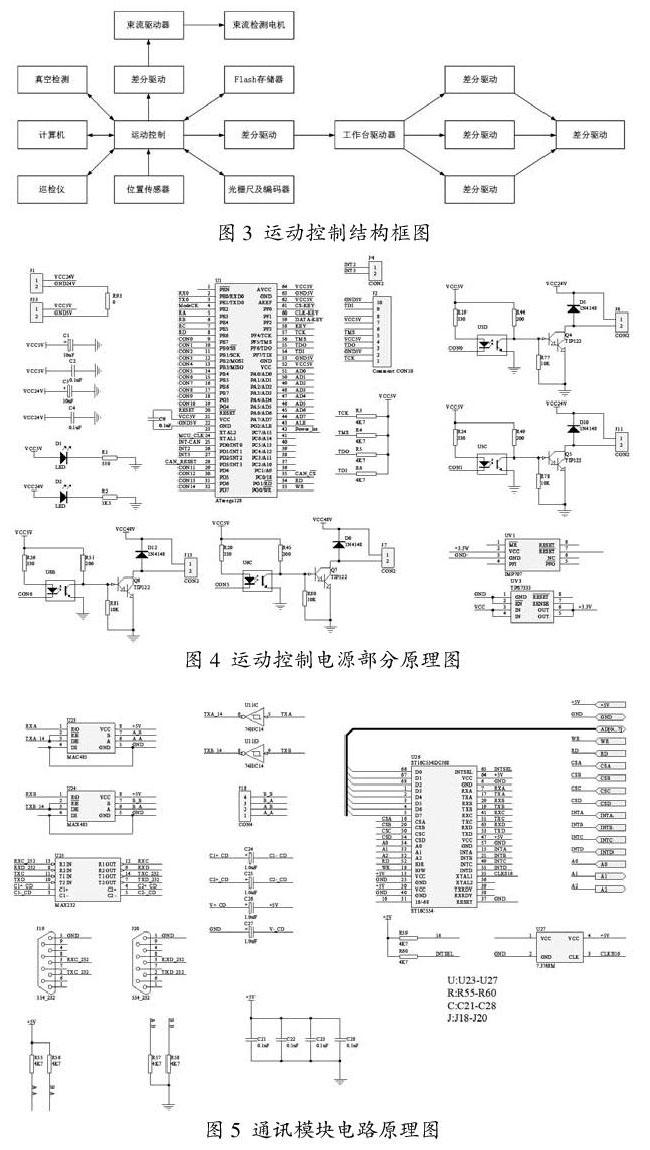
運動控制部分主要是完成樣品工作臺的運動擬合以及束流檢測電機的控制;在進行工作臺運動導軌誤差修正補償時可以采集光柵尺及編碼器輸出信號;可以存儲應用軟件生成的運動軌跡補償數據;通過串口與在真空室內的PLC模塊通訊采集工作臺及束流檢測位置開關的狀態。
將詳細介紹運動控制各個部分硬件設計的細節。其結構框圖如圖3所示。
對于兩種電機驅動器的控制接口(Dir+,Dir-,Pulse+,Pulse-,Enable+,Enable-)支持TTL電平輸入;光柵尺編碼器工作電源為5V,主控芯片及其外圍芯片工作電壓包括+5V/3.3V兩個電源等級。因此電源需要提供5V/5A的輸出能力,對于3.3V/2A通過電平轉換芯片提供,其具體型號為TPS7333,輸入電壓為5V。運動控制系統的電源分為兩部分:+48V/22A;+24V/2A,5V/5A。如圖4所示。
4 數據通訊模塊
數據通訊以RS232或RS485為基礎構建,由于RS232及RS485之間轉換很容易實現,因此不硬性規定各部分所采用的方式,具體根據情況增加RS232/485轉換器。動作命令為一個節點向另一節點的某個部件發出動作命令,接收節點接收并執行命令后向命令發出節點以狀態命令格式返回動作執行結果(圖5)。
5 實際調試實驗
為了使實驗結果準確,本節設計了兩種不同預定轉速下的傳統PID控制和模糊PID控制對比實驗。實驗方式如下:步進電機轉速由主控芯片ATmega128L通過調速器獲取,并通過RS232/RS485串口傳輸到電腦記錄實驗數據,并運用Matlab進行數據的處理。
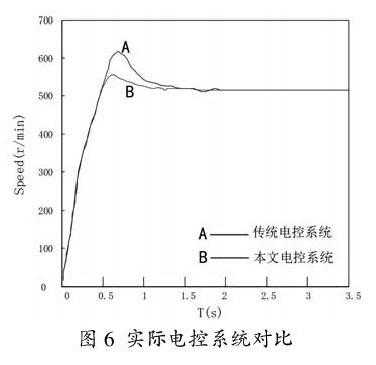
如圖6,預設步進電機轉速為500轉/分鐘的傳統電控系統和本文電控系統控制下的實際轉速曲線,圖中A轉速曲線為傳統電控系統,其具有0.8s左右的上升時間,其轉速超調至620轉/分鐘,超調量達到了20%,并且在2s實現了轉速穩定。圖中B轉速曲線為本文電控系統,本文電控系統的轉速上升時間約為0.5s,轉速超調至530轉/分鐘,超調量約為6%,并且在1.2s實現了轉速穩定。
6 結束語
筆者設計了離子束刻蝕機電控系統,首先介紹了電控系統的結構和功能模塊布置,之后分別對電控系統的四個主要功能模塊的軟件和硬件電路進行設計,為實現離子束刻蝕軌跡擬合算法提供了硬件支持,并進行了實際狀態下的控制實驗對比,驗證了此設計能夠滿足離子束刻蝕機的運動精度求。
參考文獻:
[1]劉春來,張東,史宏亮.基于PXI總線的電路板級功能測試系統[J].電子測試,2013(05).
[2]李月,陳天華.PCB功能測試系統的設計與實現[J].制造業自動化,2012(17).
[3]包建華.印制電路板圖件識別研究中的圖像預處理實現[J].電子工程師,2006(08).
[4]范云龍.PLC與變頻器實現傳送帶同步控制[J].新型工業化,2017(02).
[5]吳平峰,代宣軍.PCB測試技術的介紹[J].現代機械,2009(04).