噴涂機器人伺服系統建模與仿真
2019-06-24 06:23:22魯鳳明譚曉東
科技創新與應用 2019年13期
魯鳳明 譚曉東

摘 ?要:伺服系統常用于機器人的關節機構,由于轉矩變化和負載擾動等因素的影響,需要伺服系統有很好的跟蹤精度和控制性能。為了使伺服系統達到理想性能,使用理想的控制策略與控制方法,文章建立了電流環、速度環、位置環控制的伺服電機仿真模型,仿真實驗結果表明:使用基于位置控制的伺服系統后,位置跟蹤誤差小,提高了電機的控制精度,驗證了系統設計的正確性和可行性,為系統的軟硬件設計及實驗分析奠定基礎。
關鍵詞:噴涂機器人;伺服;仿真分析
中圖分類號:TP242.3 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2019)13-0108-03
Abstract: Servo system is often used in the joint mechanism of robot. Due to the influence of torque change and load disturbance, servo system is needed to have good tracking accuracy and control performance. In order to make the servo system achieve ideal performance and use the ideal control strategy and control method, the servo motor simulation model of current loop, speed loop and position loop control is established in this paper. The simulation results show that the position tracking error is small, the control accuracy of the motor is improved, and the correctness and feasibility of the system design are verified by using the servo system based on position control. It lays a foundation for the software and hardware design and experimental analysis of the system.
Keywords: spraying robot; servo; simulation analysis
引言
動車車體噴涂機器人主要是對動車車體進行膩子噴涂,由于車體尺寸非常大,普通的噴涂機器人尺寸并不直接適用于車體噴涂,需要重新設計一種末端執行器工作空間足夠大的自動噴涂機器人。機器人工作時需增設上升下降軸和左右移動軸兩個軸,以實現車體上下弧度的垂直噴涂,在機器人外部加設Y軸方向長距離驅動裝置,伺服系統驅動上升下降軸和左右移動軸兩個軸按上位機規劃好的軌跡運動到指定位置,實現整個車體的噴涂。而車體對機器人的噴涂質量要求較高,機器人末端執行器位置控制精度將直接影響機器人噴涂精度,所以對伺服系統定位精度要求嚴格。為了保證噴涂裝備能達到規定的精度的要求,噴涂裝備的伺服驅動系統的定位精度一定要合理,使其誤差小于規定要求。而永磁同步電機伺服驅動系統的性能直接影響機器人關節運行過程中的性能,從而影響到最終的定位精度。所以,以機器人關節伺服驅動系統為例,建立永磁同步電機伺服系統建模數學模型,對整個伺服系統仿真,確定合理的參數,從而保證整個系統能夠達到控制需求。
1 永磁同步電機伺服系統建模
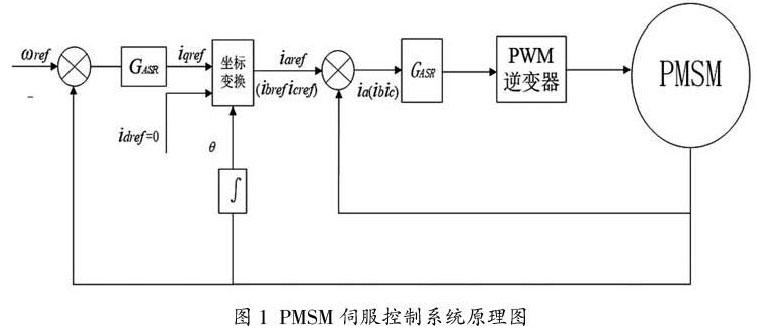
交流伺服系統通常是由電流環、速度環、位置環構成的三閉環系統[1]。在設計中首先確定電流環結構,然后將電流環作為速度環的一個結構,接著是位置環。PMSM伺服控制系統原理圖如圖1所示。
1.1 電流環設計
在伺服系統控制中,電流環是一個重要的環節,電流環位于伺服控制系統的內環,主要實現d、q軸電流的快速并準確跟隨及電流限幅,就可以快速響應轉矩的變化,所以電流的反饋必不可少,電流環的采樣頻率遠高于速度環的采樣頻率。電流環主要由電流調節器、逆變器以及電流檢測裝置組成。
1.3 位置環設計
位置環是伺服控制系統的最外環,主要實現輸出位置信號對位置指令的復現,它實現伺服電機的定位,由于位置環的特殊性, 一般不能出現超調, 故伺服控制系統的位置環控制器一般采用P控制。
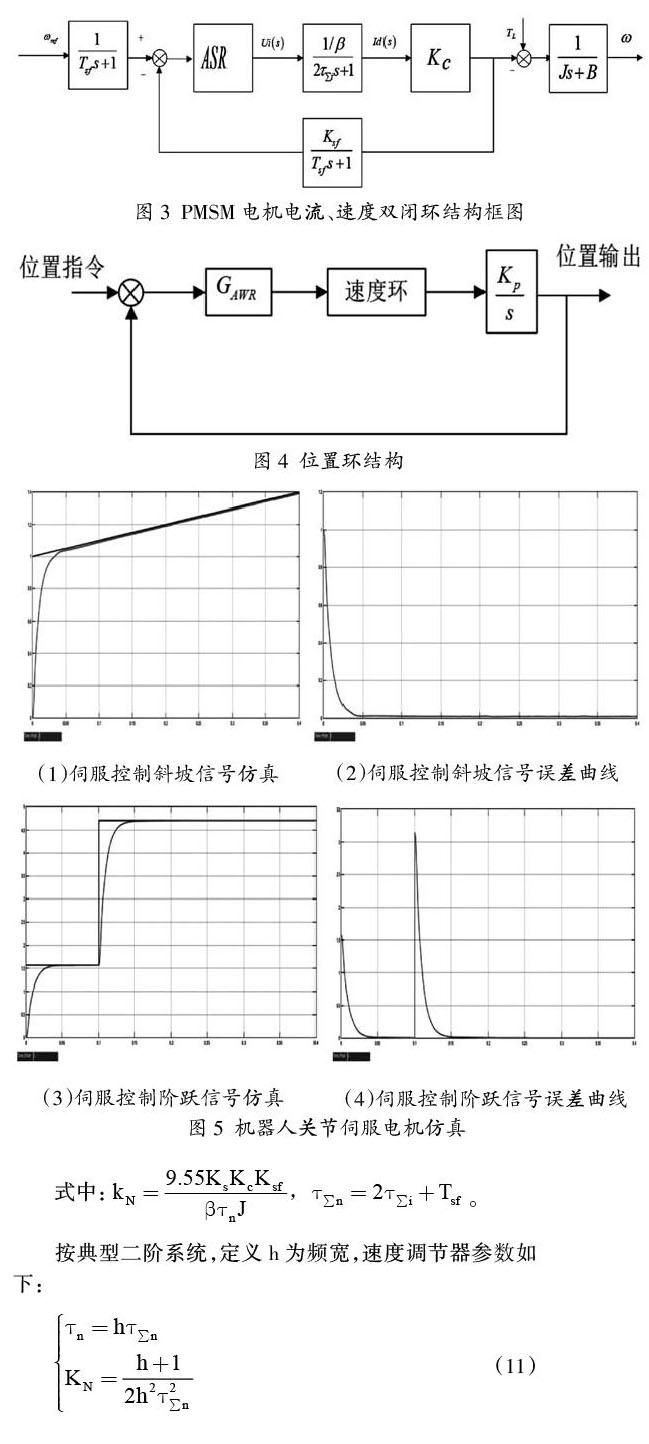
因為位置伺服控制系統是高階動態系統,所以必須對位置調節器降階,系統速度環的響應遠快于位置環,所以可以將速度環近似等效成一階慣性環節。位置環結構框圖如圖4所示。
2 仿真驗證
在交流伺服三閉環控制系統中,位置環采用比例控制,速度環和電流環采用比例積分控制。伺服控制系統采用永磁同步電機,功率1.5kW,額定電流9.3A,額定轉矩4.8N·m,定子電阻0.836Ω,定子電感5.13mH,額定轉速3000r/min,使用17位絕對編碼器作為位置反饋。
在Matlab/Simulink中使用階躍信號和斜坡信號對控制系統進行位置指令的跟蹤仿真,結果如圖5所示。從圖5中可以看出,使用PID控制可以使控制系統的指令跟蹤誤差很小,滿足機器人定位要求。
3 結論
本文在先確定使用PI調節的電流控制器,在此基礎上設計出采用PI調節的速度控制器,最后基于電流閉環、速度閉環以及方法進行機器人交流伺服系統的定位控制。通過仿真驗證了證明了在使用電流環、速度環、位置環控制的基礎上,控制系統可以有效提高系統的快速跟蹤性能,能夠實現對交流伺服系統的準確定位控制,同時保證伺服系統快速響應,說明位置控制在實際的機器人控制中非常重要,可以用于點到點以及插補等軌跡規劃中。
參考文獻:
[1]陳鵬展.交流伺服系統控制參數自整定策略研究[D].華中科技大學,2010.
[2]舒志兵,周瑋.交流伺服運動控制系統[M].清華大學出版社,2006.
[3]胡靜.基于多軸機器人的自適應伺服系統研究[D].中國航天科工集團第二研究院,2017.
[4]莊麗.機器人系統中交流伺服電機控制研究[J].制造業自動化,2015,04(37):61-83.
[5]朱中衛.基于DSA的伺服系統速度環建模與PI參數整定[D].廣西大學,2014.