基于LoRa的智慧停車管理系統設計
2019-06-25 09:54:06張正華江沛蓮陳賞恩
無線電工程 2019年7期
丁 敏,張正華,蘇 權,蘇 波,周 宇,江沛蓮,陸 輝,陳賞恩
(1.揚州大學 信息工程學院,江蘇 揚州 225127;2.揚州國脈通信發展有限責任公司,江蘇 金壇 225002)
0 引言
根據調查,2018年我國傳統模式的停車位數量已經超過8 000萬個,到了2020年,停車位的需求量將會是現在停車位數量的4倍,遠超城市空間的容納能力[1]。為緩解停車場車位空置率高,車場信息不流通的問題[2],搭建智慧停車系統尤為重要。
在目前的智能交通領域,常用超聲波檢測[3]、紅外檢測[4]和地感線圈檢測[5]等技術來檢測停車位[6],這些技術具有易受天氣和溫度等因素影響或者施工難度大且功耗高的缺點。而在傳統的車輛身份識別中,市面上較多的是利用攝像頭圖像識別車輛牌照的技術[7],其采集的圖像易受噪聲污染、光照影響而難以識別[8]。此外,常用的物聯網無線傳輸技術如藍牙、NB-IoT[9-10]等難以將遠距離傳輸與低功耗結合。
本設計針對上述停車管理系統中出現的問題,提出了一套適用、先進、可靠和經濟的智慧停車管理系統,能有效提高停車位上車輛的識別率,降低了工作人員工作強度,大大提高了管理效率。
1 系統總體設計
系統通過地磁傳感器檢測停車位,不僅對路面的破壞小,也不易受環境因素的影響[11],配合使用RFID[12]技術識別車輛身份信息,相較于基于攝像頭的圖像檢測技術則較為高效、準確。當信息采集完成后使用LoRa實現采集設備和網關之間無線通訊,LoRa超遠距離傳輸及低功耗的核心優勢解決了目前在大面積的停車管理中,不可能每臺前端采集設備使用GPRS直接與無線網連接而造成成本浪費的問題[13]。最后,網關將信息發送到云服務器,實現停車場狀態的實時顯示,智能指引車輛去往空閑停車場,提高了空閑停車場的利用率。系統的主要環節包括采集節點、網關、云服務器和電腦客戶端,系統結構如圖1所示。
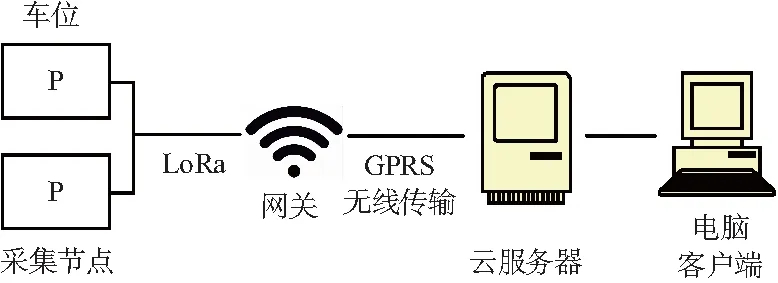
圖1 系統結構
2 系統硬件設計
2.1 采集節點
采集節點完成對停車位狀態及車輛身份信息的監測,將信息處理后經過LoRa通訊上傳至網關。該節點由數據采集處理芯片、車位狀態采集模塊、車輛信息采集模塊以及LoRa通信模塊組成,如圖2所示。
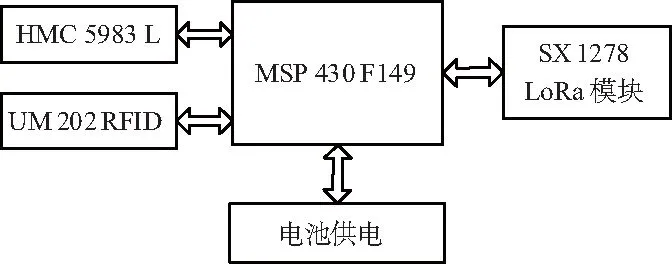
圖2 采集節點硬件設計
2.1.1 數據采集處理芯片
數據采集處理芯片使用MSP430F149,它是一款16位超低功耗MCU,可有效降低功耗,一枚電池可維持10年壽命,滿足了因埋在地下,維護次數少,需要功耗較低,能維持多年的要求。
2.1.2 車位狀態采集模塊
地磁傳感器選用HMC5983三軸磁阻傳感器,當車輛駛入或駛離停車位時,埋入停車位地下的地磁傳感器感知到汽車金屬底盤對地磁場的擾動,從而其X,Y,Z三個維度的磁力發生變化。本設計選用I2C通信方式,將傳感器采集到的地磁場三軸上的分量發送至MCU,并設置閾值,判斷數據是否逐漸減小且遠離檢測閾值,若是,則檢測為有車輛可能駛離;進一步再判斷數據是否小于檢測閾值,若是,則檢測結果為車位有車輛駛離;反之,檢測結果為車位沒有車輛駛離。
2.1.3 車輛信息采集模塊
車輛信息采集選用UM202模塊,RFID讀卡器模塊選用UM202超高頻讀卡模塊,RFID讀卡器模塊通過RS232轉TTL串口通訊與單片機相連接,初始化RFID讀卡器模塊,并設置連續讀卡模式,同時設置合適的發射功率方便RFID天線工作(功率范圍0~30 dbi)。RFID讀卡器模塊讀取通過RFID天線檢測到的電子標簽信息,完成車輛信息采集。
2.1.4 LoRa通信模塊
本部分采用無線串口模塊ATK-LORA-01,使用AT指令傳輸[14]。MCU通過TTL串口與SX1278模塊進行連接,根據停車位狀態數據變化情況,實時向網關發送停車位占用/空閑狀態以及車輛身份信息。
2.2 網關硬件設計
采集節點接收信息后,將信息發送給網關。LCD可實時顯示信息,同時數據經過GPRS模塊上傳至服務器。該節點由STM32F407、SX1278LoRa模塊、LCD和GPRS模塊SIM800C組成,如圖3所示。

圖3 網關硬件設計
該節點選取STM32F407單片機為控制芯片,具有低電壓和節能的優點。本系統利用I2C通信實現車輛信息數據傳輸。設計中的SIM800C模塊,內置工業標準的TCP/IP協議,是一款尺寸緊湊的GSM/GPRS模塊[15]。用戶通過UART 串口發送AT指令集,初始化GPRS模塊工作,等附著到GPRS網絡之后,獲取云端IP地址,使云端建立連接,完成車位狀態及車輛信息向云端的傳送。
3 系統軟件設計
3.1 采集節點軟件流程
采集部分使用睡眠-喚醒-睡眠的任務形式,每隔1 s采集一次車位信息,喚醒后檢測停車位狀態(即地磁模塊HMC5983檢測的數據的變化),若發生明顯的變化,則啟動RFID模塊,檢測停在該車位的車輛身份信息(即電子標簽上存儲的數據),然后數據發送至網關。軟件流程如圖4所示。
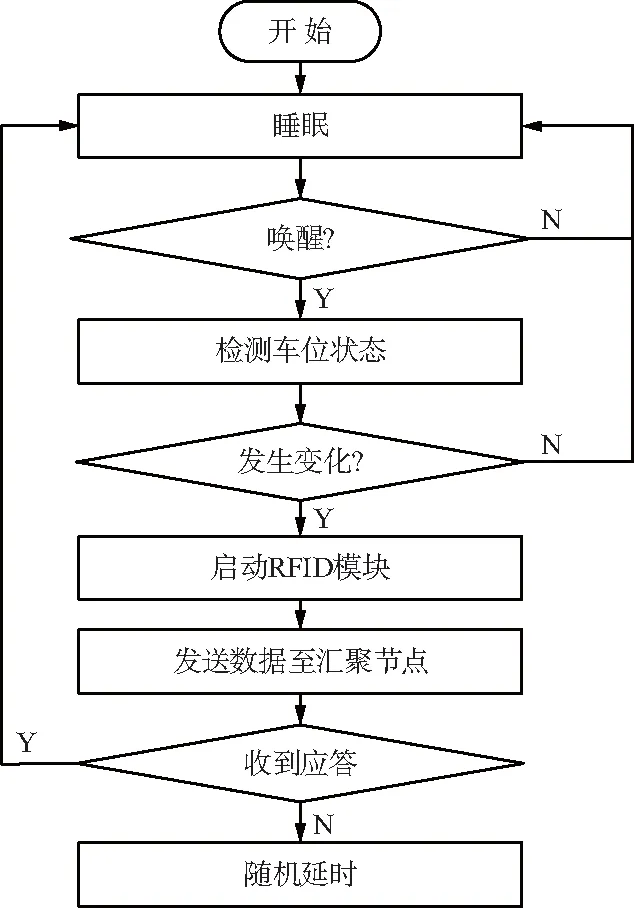
圖4 采集節點軟件設計流程
3.2 LoRa通信協議設計
LoRa通信協議設計LoRa模塊采用ISM頻段射頻,并基于SX1278擴頻芯片實現遠距離數據傳輸,擁有透明傳輸、定向傳輸以及廣播與數據監聽模式。本文設計采用廣播監聽模式,由多個LoRa節點(對應不同車位)向一個匯聚節點LoRa模塊發送數據,如圖5所示。

圖5 LoRa一對多傳輸
將圖5中匯聚節點A的地址設置成0xFFFF,使之處在廣播監聽模式,節點B~F分別設置不同的地址,以此代表各個車位編號。以節點C為例,將設備C地址設置為0XAB00,信道設置為0X01,當設備C發送:AB 0001有車/無車AB00,如表1所示,匯聚節點A接收到數據:有車/無車AB00,其中,有車與無車狀態根據地磁傳感器測試的數據來判斷,AB00代表發送這個數據節點的地址,不同地址對應不同的車位編號,最后匯聚節點A將B~F所有節點采集到的數據通過GPRS模塊發送至服務器,由TCP/IP協議完成,供電腦端的管理人員進行數據處理。
表1 數據輸出

發送目標地址信道地址車位狀態自身地址AB1010有車/無車AB00
3.3 車輛管理顯示平臺
GPRS與云端建立連接后,Web網頁端實現客戶的遠程登錄,查詢某一路段停車位的狀態、在此車位上停車的車輛信息、同一輛車駛入與駛離的時間。網頁端通過圖表的形式實現車輛管理顯示。為后續通過車輛管理平臺實現停車場車位的監控、車輛繳費和停車告知提供便利。
Web網頁開發采用B/S結構,用戶工作界面由瀏覽器實現。使用HTML完成網頁制作[16],并采用PHP技術實現網頁與數據庫的連接。通過添加多個超級鏈接點來實現登錄界面的密碼找回、新用戶注冊和搜索等功能,并對界面進行整體優化。用戶在登陸后可輕易地實現車位查詢、在線繳費的功能,而管理員登入端則會增加遠程監控以及提示功能,同時,系統會將一段時間內的數據自動上傳到云端,方便查看車位停放歷史。
4 實驗結果及分析
4.1 地磁檢測車位
將HMC5983完全水平放置在停車位上,使Y軸正對于車輛駛入停車位的方向,Z軸垂直于水平面。測試車輛為SUV類型,每秒記錄一次車輛從駛入到駛離車位時的三軸數據,得到曲線圖如圖6所示。實驗結果顯示,三軸數據均有變化,且Z軸變化最明顯,檢測范圍是0.2 cm,閾值為2.5高斯,可以實時檢測車位狀態。

圖6 地磁傳感器數據曲線
4.2 RFID檢測車輛身份
與現有攝像頭圖像識別技術對比,在霧天或光照較強的情況下,攝像頭無法精準識別車牌,正常情況下的識別與霧天下的識別對比如圖7所示,而RFID可以不受環境影響,較為準確地識別出車輛身份信息,如圖8所示。

圖7 攝像頭識別車牌

圖8 RFID識別車牌
4.3 與現有停車系統對比分析
實驗結果表明,在對停車信息的檢測方法上,相比于其他采用單一測試源的同類系統,本系統的方法更可靠。通過HMC5983地磁傳感器Z軸數據變化能夠檢測到車位狀態,配合RFID讀卡器模塊識別車輛的其他有效信息更能提高車輛的識別率,解決了當前停車管理系統易受天氣、噪聲等因素影響而無法準確識別車輛信息的問題,且RFID圓極化天線增大天線識別范圍,能夠有效克服汽車金屬底盤對信號傳輸的干擾,有效檢測到電子標簽。通過對LoRa單跳通信距離的測試,其單跳通信距離遠大于ZigBee、藍牙等技術,完全滿足了本系統對低功耗的需求。綜上,與現有停車管理系統相比,本系統準確度高、功耗低且抗干擾能力強、通訊距離遠,具有很大的優越性。
5 結束語
本文完成了基于LoRa的智慧停車管理平臺的設計。通過將系統部署在停車場進行試驗,驗證了系統的可行性和實時性要求。地磁傳感器與RFID的結合有效提高了車輛識別率,LoRa技術的應用也展現了低功耗的核心優勢。與其他同類系統相比,本系統具有廣闊的市場前景,未來還需對停車場中信號干擾問題做進一步研究,以便更好地提高停車管理系統的準確性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
