一種基于形態濾波的水聲信號檢測算法
2019-06-25 09:54:06王曉慶母詩源王志欣
無線電工程 2019年7期
王曉慶,母詩源,李 晉,王志欣
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
在被動聲吶目標檢測方面,傳統方法主要通過空域的波束合成處理獲得空間增益,通過時間上的積累獲得時間增益。一般空間波束合成方法有常規波束形成(CBF)和MVDR等方法[1-6]。CBF方法的優點在于算法簡單、計算量小,但其方位分辨能力較差,多個目標相互靠近時,相互干擾嚴重。MVDR方法屬于自適應的波束形成方法,可以提高方位分辨率,但是在陣列導向矢量出現誤差和陣元快拍次數小于陣元個數時,性能急劇下降;另外,上述傳統方法并不能抑制水下復雜環境噪聲在時間和空間上的非平穩性影響。
數學形態濾波[7]在圖像處理中的應用已經較為廣泛,是一種針對信號時域特征的非線性處理方法。隨著對數學形態學理論的深入研究,相比于其他方法,在處理過程中可以保證幅度不畸變、相位不偏移,因而受到了越來越多的關注。數學形態濾波技術應用于水下目標檢測時,有效地抑制非平穩色噪聲,大大降低被動聲吶的虛警概率。
導向最小方差波束形成(STMV)算法[8]充分利用寬帶信號時寬—帶寬乘積大的特性,當信源相干或者采樣快拍數較少時,具有更好的統計特性,可增大對旁瓣的抑制效果,合成增益較傳統方法高。
本文結合數學形態學濾波和STMV提出了一種新的水聲目標信號檢測方法。該方法在強干擾背景下,能有效檢測目標的共振線譜。通過對海試試驗采集的數據進行分析處理,并將其與常規處理方法CBF,MVDR進行對比,驗證了算法的有效性。
1 STMV算法
水下被動聲吶陣列探測原理如圖1所示。STMV算法利用導向協方差矩陣,對不同頻點的協方差矩陣進行相干積累,獲得了寬帶增益并能夠處理相干源。
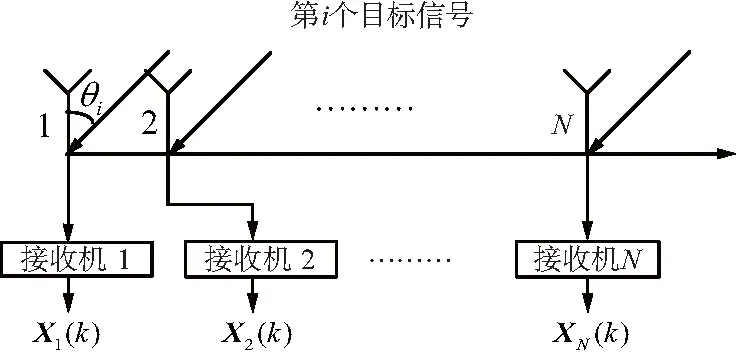
圖1 水下被動聲吶陣列探測原理
其基本原理如下:
設有K個寬帶信號si(t)(i=1,2,...,K)以來波方向θi入射至N元矢量水聽器陣列,則陣列第l個陣元的輸出可表示為:
(1)
式中,τi為第i個寬帶信號在相鄰陣元之間的傳播時延;Nl(k)為噪聲矢量。在觀察時間長度T內,對陣列輸出數據進行離散傅里葉變換,根據前述Xω的形式,可得Xω中對應頻率ω的頻域快拍為:
(2)
式中,a(θ,ω)為對應頻率ω的陣列導向矢量;s(ω)為信號的離散傅里葉變換;N(ω)為噪聲的離散傅里葉變換。
根據寬帶陣列信號數學模型,將式(2)改寫為矩陣形式,可得:
Xω(ω)=A(ω)S(ω)+N(ω),
(3)
式中,A(ω)=[a(θ1,ω)a(θ2,ω) ...a(θK,ω)]為矢量a(θ,ω)組成的矩陣;S(ω)=[S1(ω)S2(ω) ...SK(ω)]T為信號的頻域矩陣;N(ω)為噪聲矢量。
對于CBF,通過對相應陣元進行延時補償,可增強對期望方向信號的響應,CBF的延時補償實現方式為:
(4)

(5)
式中,τ為對應期望方向θ的單位延時,有:
(6)
式中,d為陣元間距;c為波速。由X(k,θ)表示的CBF輸出為:
y(k,θ)=WHX(k,θ),
(7)
式中,W=[1 1 ... 1]T為固定加權矢量。由上述導向傳感器輸出X(k,θ),可定義導向協方差矩陣(STCM)RSTCM為:
RSTCM(θ)=E[X(k,θ)XH(k,θ)],
(8)
式中,X(k,θ)為導向傳感器輸出。將導向輸出X(k,θ)在頻域展開,可得:
(9)
式中,矩陣T(ω,θ)具有與導向矢量相同的作用,有:
T(ω,θ)=diag(1 e-jωτ... e-jω(N-1)τ)。
(10)
當觀察時間T大于信號和噪聲的相關時間時,不同頻率間的傅里葉系數相互正交,結合式(10),STCM矩陣可表示為:
(11)
(12)
根據輸出最小方差原理,可知寬帶波束合成最優權與MVDR最優權Wopt相同的形式,其空間譜估計式也相同,由Capon空間譜估計式可知,STMV的空間譜估計式為:
(13)
式中,W=[1 1 ... 1]T為固定加權矢量;RW-STCM(θ)為引導方向θ的加權指向協方差矩陣。頻域快拍的協方差矩陣Rx(ω)為:
(14)
實際情況中,參考采樣協方差矩陣求逆(SMI)中的協方差矩陣構造方法,則Rx(ω)的最大似然估計為:
(15)
式中,Xωi(ω)為第i個觀察時間段內對應頻率ω的頻域快拍。則實際應用中的STMV形成的空間譜估計式為:
(16)

2 信號層形態學濾波基本原理
數學形態學[9-12]是一種非線性圖像(信號)處理和分析工具,具有一套完整的理論、方法和算法體系。它采用一套獨特的變換或運算來描述圖像的基本特征或基本結構,即圖像中各像素或各部分之間的幾何關系。
基于數學形態學理論,形態學濾波提供了一種基于形狀的非線性變換理論和方法,在數字信號處理中有重要的作用。該理論運用結構元素修改信號局部特征,得到信號更本質的形態。其一維離散情況下的多值形態變換,對信號頻譜中的峰值(正脈沖)噪聲、低谷(負脈沖)噪聲以及白噪聲有很好的抑制效果。
設信號f為定義在F={0,1,...,N-1}上的離散函數,結構元素b為B={0,1,...,M-1}上的離散函數,且有N>M,則4種基本的一維形態變換定義為:
f(x)關于b的膨脹:

n=0,1,...,N-M。
(17)
f(x)關于b的腐蝕:

n=0,1,...,N-M。
(18)
如果對信號的頻譜圖作一維灰度形態學運算,則膨脹算子會減小信號頻譜的谷值,擴展峰頂;而腐蝕算子則會減小信號的譜峰,加寬谷域,即:腐蝕算子為最小值濾波器,可以獲得數據的下包絡;膨脹算子為最大值濾波器,可以獲得數據的上包絡。
根據式(17)和式(18),f關于b的開運算和閉運算分別為:
(19)
開運算是非擴張的,小于結構元素的部分會被“開掉”,所以開運算可以抑制信號的尖峰,如突發、毛刺等;閉運算是擴張的,小于結構元素的部分會被膨脹填充,所以閉運算可以抑制信號的波谷。開、閉運算所能濾除的正、負脈沖寬度取決于運算所使用的結構元素b的寬度M,選取大于噪聲寬度的結構元素,可以利用開、閉運算去除信號中的噪聲。上述基本運算的不同組合構成的濾波器可濾除不同類型的噪聲,實現信號平滑處理。
如圖2所示,本文使用如下開閉運算組合[13-17]:

(20)
該方法對信號頻譜分別進行聯合開閉運算和閉開運算,并將運算結果做平均,最后將平均的結果再進行1~2次的開運算,這樣經過多次形態學處理和平均后,得到的結果會很好地反映信號的底部噪聲電平,再用原信號頻譜減去測算出的噪聲基底,得到的信號基底會基本平坦,很大程度上避免了由于色噪聲干擾和信號頻譜起伏對信號檢測造成的影響。
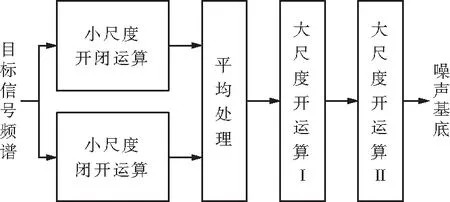
圖2 基于數學形態學濾波的處理流程
3 本文提出的方法
本文結合數學形態學濾波和STMV形成提出了一種新的水聲目標檢測方法,水聲陣列采集數據首先經過信號預處理后進行頻域的波束形成處理(使用頻域STMV算法),獲取空間上的增益。接著,使用Welch譜估計減弱信道衰落對變換造成的影響,獲取時間上的處理增益。之后,使用形態濾波及白化處理消除色噪聲干擾和信號頻譜的起伏。最后,使用高斯白噪聲門限檢測方法,完成對目標信號的檢測。
本文所提方法的水下目標檢測流程如圖3所示。具體步驟如下:
① 對水聲陣列采集數據進行預處理,主要包括:去直流、復頻域變換和帶通濾波,得到N路濾波后的時域數據;
② 將濾波后的時域數據進行滑動窗FFT變換,從而將信號變換到頻域,方便后續處理;
③ 對頻域數據進行波束掃描,掃描方法采用STMV算法;
④ 對波束掃描結果進行平均周期圖時間積累(Welch譜估計),輸出LOFAR估計結果;
⑤ 對平均周期圖輸出結果進行數學形態濾波,從而精確估計出信號頻譜的噪聲基底;
⑥ 利用得到噪聲基底對目標信號進行白化處理,消除信號的雜散點和毛刺;
⑦ 白化處理后的信號可以近似看作處于高斯白噪聲環境,可以利用高斯白噪聲環境下的門限估計和信號檢測理論進行處理,得到目標檢測結果。
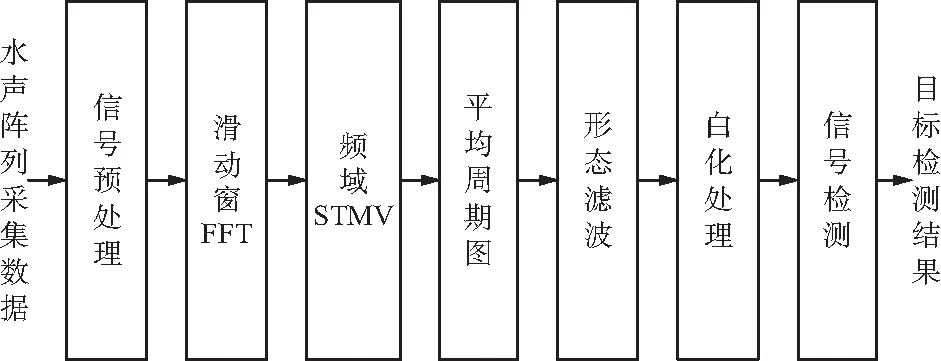
圖3 本文所提方法的水下目標檢測流程
4 海試數據驗證與分析
使用本文檢測算法進行海試試驗,使用模擬聲源模擬水下目標,采集相關試驗數據進行處理,驗證本文檢測算法的效果。某時間段用常規方法處理得到的方位歷程圖如圖4所示。采用本文基于形態學濾波的STMV方法如圖5所示。

圖4 常規CBF方法處理的方位歷程圖(拖船航速8節)

圖5 基于形態學濾波的STMV方法處理的方位歷程圖(拖船航速8節)
該數據中含有一個目標和拖船自噪聲強干擾。目標的初始方位為110°,拖船自噪聲干擾在10°~35°的方位范圍內,拖船航速為8節。目標由于距離拖曳陣聲吶較遠,CBF處理的背景噪聲雖然平滑,但是不能消除拖船自噪聲的影響,目標探測效果較差,并且背景噪聲也存在非常多的毛刺,不均勻。
CBF方法處理的方位歷程圖如圖6所示,在另一個時間段,目標初始方位為78°,拖船航速12節,拖船自噪聲干擾在20°~40°的方位范圍內非常強,常規方法的方位歷程軌跡被近場的拖船自噪聲強干擾淹沒。而采用本文基于形態學濾波的STMV方法如圖7所示,無論拖船是8節航速還是12節航速,都能很好地抑制拖船自噪聲并且清晰地呈現出目標的方位歷程,且能量集中,背景噪聲也僅有少量殘留。
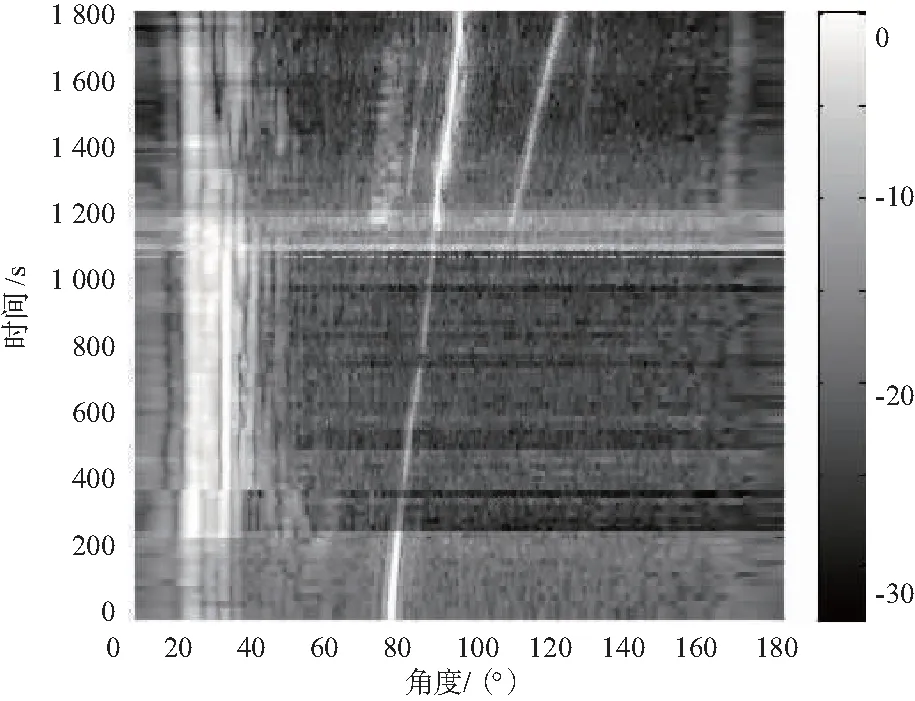
圖6 CBF方法處理的方位歷程圖(拖船航速12節)
圖7 基于形態學濾波的STMV方法處理的方位歷程圖(拖船航速12節)
對STMV波束形成輸出的時域信號進行進一步目標線譜檢測。第1個時間段,拖船航速8節。STMV波束形成輸出的時域信號經過Welch譜估計和形態濾波處理后,色噪聲基底被有效地轉化為平坦的高斯白噪聲基底,從而成功檢測出線譜頻率。第2個時間段,拖船航速12節。從STMV波束形成輸出可以看到,形態濾波處理前的信號完全淹沒在色噪聲背景下,經過形態濾波和白化處理的目標頻譜,CW信號相對于噪底增益提高了約20 dB,從而可以成功地使用常規門限檢測方法對目標進行檢測。形態濾波前后STMV輸出信號檢測結果如圖8和圖9所示。
圖8 形態濾波前后STMV輸出信號檢測結果(拖船航速8節)
圖9 形態濾波前后STMV輸出信號檢測結果(拖船航速12節)
5 結束語
本文深入研究了水聲目標檢測中色噪聲及近場強干擾影響目標檢測概率的問題,使用在寬帶情況下旁瓣抑制能力強的波束形成算法,提出了一種聯合導向最小方差波束形成和形態濾波的水聲目標檢測方法,形成了一套新的水聲信號檢測流程。該方法能夠在保證較高的信號檢測概率的前提下大幅降低檢測算法的虛警概率。通過對海試數據進行處理證明,本文提出的方法有更強的凸顯信號和抑制噪聲的能力。后續工作可在分裂陣處理[18]的基礎上結合數學形態濾波實現水下目標的高分辨檢測和測向。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
