自動駕駛車輛中駕駛人的信息需求特征
2019-06-25 08:49:00邢慧寧鈕建偉
城市交通 2019年3期
邢慧寧,秦 華,2,鈕建偉
(1.北京建筑大學機電與車輛工程學院,北京 100044;2.北京市建筑安全監測工程技術研究中心,北京 100044;3.北京科技大學機械工程學院,北京 100083)
0 引言
自動駕駛是當今社會研究的一大熱點,自動駕駛汽車被認為能夠提高舒適度、降低事故的發生率、減少交通擁堵以及減少環境影響[1]。美國國家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)根據對自動駕駛系統的定義,將自動駕駛系統劃分為5 個等級[2],分別為:等級0,無自動化;等級1,特定功能自動駕駛;等級2,集成功能自動駕駛;等級3,有條件自動駕駛;等級4,完全自動化。
目前車輛自動駕駛系統還未達到完全無人駕駛的程度,只能提供一些駕駛輔助操作,例如,提供使車輛以期望的速度穩定行駛、實現自主導航行駛等功能[3-4]。但當遇到一些突發狀況時,自動駕駛系統無法自行處理,需要由駕駛人接管控制車輛并做出決策。在由自動駕駛系統操控到真人操控的切換過程中還存在很多問題[5],例如駕駛人反應時間、車輛性能、人機交互等方面[6-7]。而且在自動駕駛系統控制車輛行駛的過程中,駕駛人從操控者變成了監督者的角色[8],這種角色的轉變會降低駕駛人的警覺性。由于對自動駕駛系統的過度信任[9],駕駛人不會一直監督自動駕駛系統[10-11],而會做一些與監督駕駛任務無關的事情,例如聽音樂、打電話等第二任務,致使注意力分散、情景意識缺失,期間缺乏對車輛行駛的狀況及周圍環境狀況的足夠了解。因此,降低自動駕駛系統的使用所帶來的消極影響,研究駕駛人在不同的第二任務中的信息需求,幫助其快速了解當前突發狀況很有必要。
文獻[12]對高速公路上不同自動駕駛等級下駕駛人的信息需求進行研究,確定了一些在自動駕駛系統使用過程中必不可少的重要信息,其中人機交互專家們認為最重要的一點就是系統行為的反饋應該是透明的、可理解的以及可預測的,包括當前的系統狀態、回退水平、剩余時間、行駛計劃及其原因。文獻[13]從定性以及定量方面對城市道路場景中警告信息的呈現時間以及呈現間隔進行總結,并根據顯示信息的復雜度進行分類,根據信息來源總結了近150 種不同的信息需求。通過研究城市道路中高級駕駛輔助系統(Advanced Driver Sssistance Systems,ADAS)中抬頭顯示器(Head-Up Display,HUD)和低頭顯示器(Head-Down Display,HDD)分別呈現哪種警告信息類型,發現用戶對抬頭顯示器中緊急警告信息,諸如導航或當前行駛速度等動態信息以及駕駛相關內容(交通標志識別)等信息具有明顯偏好。同時,認為狀態信息和指示標志在抬頭顯示器中具有干擾作用,只要在特定的時間間隔呈現這些信息和標志(開/關/激活)即可[14]。
以上研究主要是針對高速公路上的駕駛信息需求以及國外城市道路的駕駛信息需求。而中國城市道路的交通情況有其特殊性[15]:1)隨著城鎮化建設的加速,車輛保有量急劇上漲,造成交通擁堵;2)車流混雜,道路中存在各類交通參與者;3)駕駛人行為意圖難以預測,存在不按交通規則駕駛車輛的現象。
本文基于中國城市道路的特點,研究在城市道路場景的自動駕駛車輛中,駕駛人處于不同的第二任務中的信息需求。
1 實驗設計
為了研究自動駕駛車輛中駕駛人的信息需求,評估處于不同的第二任務中信息對駕駛人的重要程度,利用自動駕駛模擬平臺進行實驗研究。根據中國城市道路場景的特點以及交通事件發生的頻率和危險程度[16],選取和設計了6 種常見的城市道路場景,參試者分別在6 種道路場景中模擬自動駕駛,并在實驗結束之后完成信息需求問卷。
1.1 自動駕駛模擬平臺和實驗場景設計
實驗在中國標準化研究院的虛擬現實與仿真實驗室完成,實驗平臺如圖1所示。
6 種城市道路典型場景分別為:場景1,交通擁堵行駛緩慢,需要駕駛人多次啟動、制動的道路場景;場景2,十字交叉口,人車混雜的道路場景;場景3,前方有車輛不停變換車道的道路場景;場景4,公共汽車出站強行占道的道路場景;場景5,前方出現車輛交通事故的道路場景;場景6,前方車輛緊急制動的道路場景。
1.2 實驗任務及過程

圖1 實驗平臺Fig.1 Experimental platform
實驗的參試者共12人,年齡介于22~47歲(均值為 26.25 歲),駕齡為 1~16年(均值為3.21年),在此之前沒有任何使用自動駕駛系統的經驗。將參試者隨機分為2 組,每組6人。第一組參試者需要實時監控駕駛任務,為監控任務組。第二組參試者不需要實時監控駕駛任務,需要完成一些與駕駛任務無關的任務(第二任務),為第二任務組。第二任務又稱為二級任務、次要任務或次任務等,是指相對于控制車輛、保持車道、監控道路狀況等主駕駛任務而言,與駕駛無關或不直接相關的其他任務,如收聽廣播、使用手機、看地圖、與乘客交談等[17]。無第二任務的情況下,要求參試者注意力完全集中于監控任務。第二任務組中,參試者需要完成三種不同的第二任務,分別為聊天、編輯文檔和看電影。
實驗開始之前,首先實驗人員向參試者介紹實驗內容和實驗任務,讓參試者了解該實驗的研究目的。然后,參試者簽寫書面《知情同意書》并填寫個人基本信息表。在進行正式實驗之前,每名參試者有10 min的時間熟悉實驗環境以及自動駕駛模擬系統。
實驗過程中,使用頭戴式眼動儀追蹤參試者眼球的注視行為,通過iView X 軟件將參試者眼球注視行為記錄成視頻,隨后通過BeGaze3.3 分析軟件對所錄視頻進行分析,得到參試者眼球在各個位置的注視時間。當參試者每完成一種場景的駕駛任務后都需要完成一份問卷調查,并基于其實驗場景對自動駕駛過程中所需求的信息進行重要度評估。在完成當前場景的調查問卷后便開始下一個場景的實驗,直到6 個場景的實驗全部完成,實驗結束。
2 結果分析與討論
2.1 問卷結果統計
將參試者對每個場景中每項參數的評分進行匯總,然后基于“二八”原則對收集到的數據進行處理。結果如表1~表3所示。
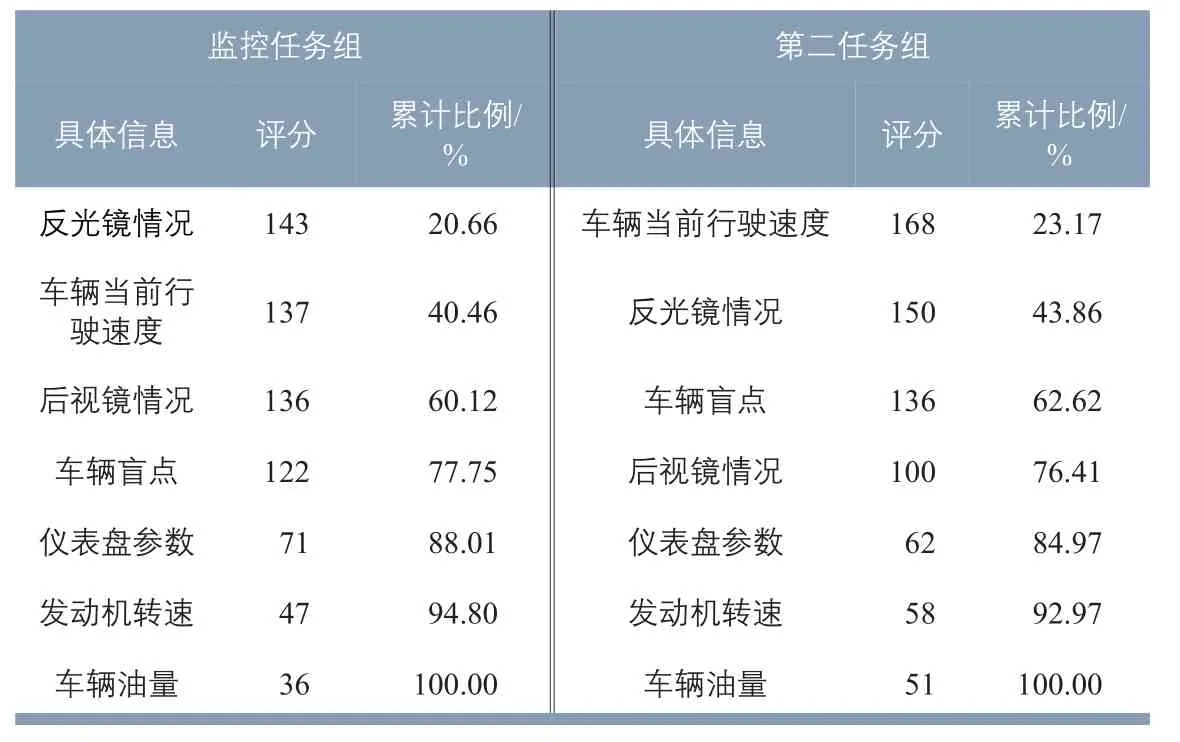
表1 汽車信息Tab.1 Automobile information
由表1 可知,監控任務組中,反光鏡情況、車輛當前行駛速度、后視鏡情況和車輛盲點占的比例很大;第二任務組中,與監控任務組相同,同樣是這些信息占的比例較大。說明兩組駕駛人均認為這些信息很重要,只是在不同的任務中,這些信息的重要度順序不同。
由表2 可知,監控任務組中,當前場景的危險程度、與兩側車道車輛的距離和車頭時距等信息占的比例較大,而第二任務組中,當前路段的交通標志和當前場景的危險程度等信息占的比例較大。對比可知,兩組駕駛人均認為當前場景的危險程度信息很重要。監控任務組中,駕駛人更注重車輛周圍情況等駕駛任務相關信息;第二任務中駕駛人認為道路信息(交通標志等)更重要。
由表3 可知,監控任務組中,周圍車輛的行駛速度以及當前行駛速度制動距離等信息占的比例很大;而第二任務組中,當前行駛速度制動距離以及輔助系統的狀態等信息占的比例很大。對比可知,兩組駕駛人均需要當前行駛速度制動距離信息輔助其決策。監控任務組中,駕駛人實時關注駕駛任務,對于周圍路況關注度較高;而第二任務組中,駕駛人的注意力都集中在第二任務上,對駕駛任務的關注度相對較低,所以對輔助系統的能力信息關注較高。
2.2 問卷結果分析與討論
將參試者對每個場景中每項參數的評分進行匯總整理,然后采用因子分析法對收集到的數據進行分析。
2.2.1 監控任務組
根據特征值大于1 的原則得到兩個主因子(見表4),其中第1 主因子貢獻率為41.97%,代表場景3~場景6 等緊急危險場景,稱為緊急危險場景因子;第2 主因子貢獻率為33.98%,代表場景1 和場景2 等擁堵復雜場景,稱為擁堵復雜場景因子。以第1主因子為橫坐標,第2 主因子為縱坐標繪制散點圖,直觀表示各個信息在兩個主因子中的分布狀況,主因子值越高表示該信息越重要(見圖2)。第1主因子高的信息有當前車輛行駛速度、車輛盲點、儀表盤參數、發動機轉速、后視鏡情況、車頭時距、兩側車道的車輛及人員狀況、當前路段車輛及行人的行駛狀況,由此發現在緊急危險場景中,駕駛人更關注自身車輛周圍的情況;第2 主因子高的信息有當前路段行車道條數、當前道路的速度限制、當前路段的交通標志、與問題路段的距離、前方道路的行駛條件、與兩側車道車輛的距離、反光鏡情況、車輛盲點,由此發現在擁堵復雜場景中,駕駛人更關注當前道路相關信息。
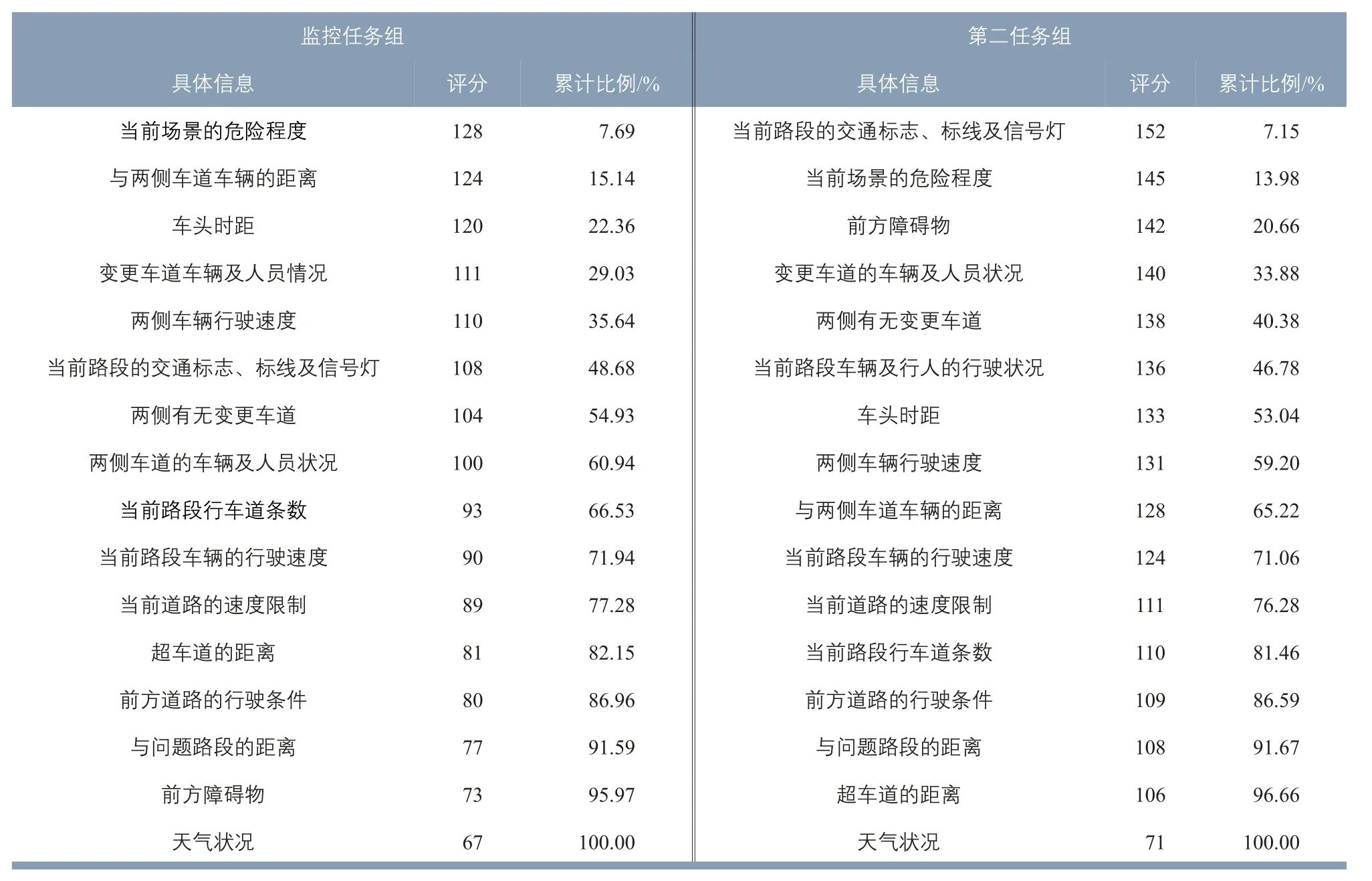
表2 環境信息Tab.2 Environment information
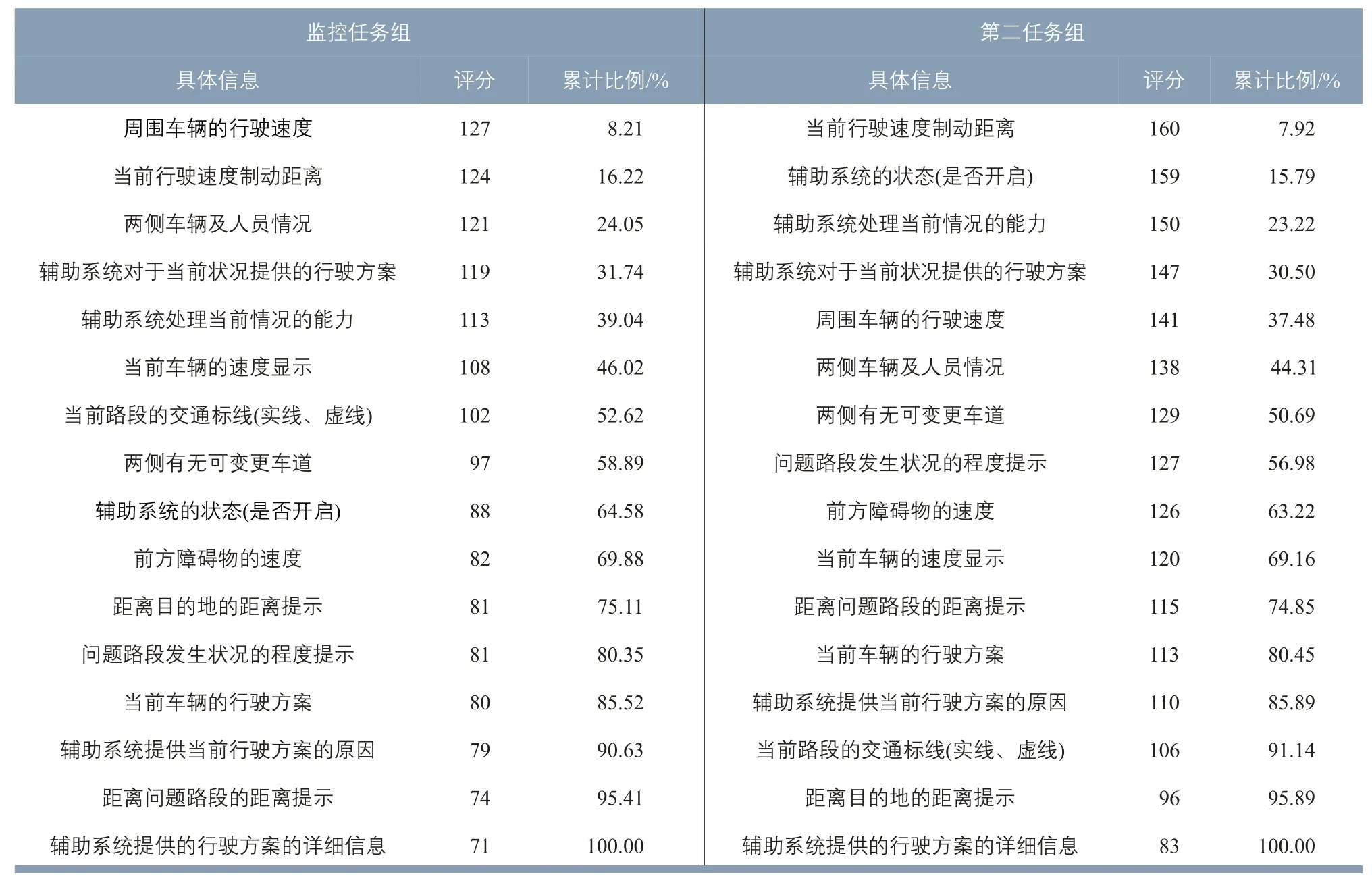
表3 系統信息Tab.3 System information
由于各主因子的方差貢獻率不同,所以在評價信息時將主因子的方差貢獻率作為權重,計算各信息在2 個主因子的得分與相應權重乘積的累計和作為該信息的綜合得分,即

式中:S為綜合得分;FAC1_1為各信息在主因子1的得分;FAC2_1為各信息在主因子2的得分。根據綜合得分從高到低排序得出各信息的重要度排序結果(見表5)。
由表5 可知,綜合得分較高的前幾條信息為反光鏡情況、后視鏡情況、車輛當前行駛速度、當前場景的危險程度、周圍車輛的行駛速度、當前行駛速度制動距離、與兩側車道車輛的距離等與當前駕駛任務緊密相關的信息。也就是說,駕駛人處在監控狀態下實時都在關注駕駛任務,認為駕駛任務相關信息最為重要,而與系統相關的信息不是很重要。這與表1~表3 的統計結果以及圖2 的散點圖信息相一致。而文獻[12]的研究結果與本研究不同,發現在部分自動駕駛等級下,除了與駕駛任務相關的信息之外,駕駛人更需要與自動駕駛系統相關的信息,因為駕駛人認為監控任務是一件很無聊的事情,容易注意力分散,所以當其注意力不集中時需要及時了解當前系統是否開啟以及系統的剩余時間和處理問題的能力等信息,以便確定是否要接管車輛。
2.2.2 第二任務組
經過方差最大正交旋轉得到3 個主因子(見表6),其中第1 主因子貢獻率為43.6%,代表場景3~場景5等緊急危險場景,稱為緊急危險場景因子;第2 主因子貢獻率為24.55 %,代表場景1 和場景2 等擁堵復雜場景,稱為擁堵復雜場景因子;第3 主因子貢獻率為21.96%,代表場景6,稱為緊急制動場景因子。以第1 主因子為橫坐標,第2 主因子為縱坐標繪制散點圖,直觀表示各個信息在兩個主因子中的分布狀況,主因子值越高表示該信息越重要(見圖3)。第1主因子高的信息有當前場景的危險程度、前方障礙物、車輛當前行駛速度、車輛盲點、兩側車道的車輛及人員情況、當前行駛速度制動距離、與兩側車道距離、輔助系統處理當前情況的能力;第2 主因子高的信息有當前道路的速度限制、當前路段的交通標志、反光鏡情況、車輛當前行駛速度、車輛盲點、兩側有無變更車道、與前后車的車距、輔助系統處理當前情況的能力。在兩個主因子得分都比較高的信息均是與當前駕駛任務密切相關的信息。此外,輔助系統處理當前狀況的能力在兩個主因子的得分都較高,說明無論是在緊急危險場景還是擁堵復雜場景中,當駕駛人執行第二任務注意力不在駕駛任務上時,都需要了解輔助系統是否能夠處理當前狀況。
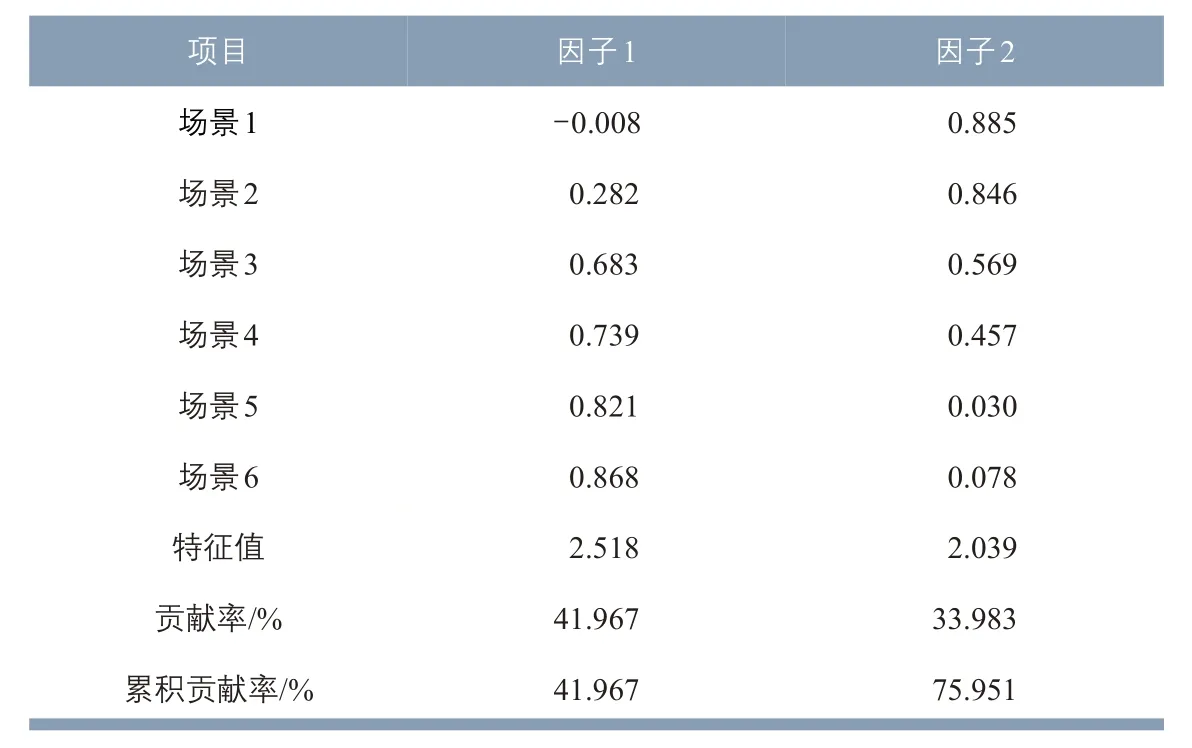
表4 監控任務組旋轉后的因子載荷矩陣Tab.4 Rotated component matrix of controlled tasks
由于各主因子的方差貢獻率不同,所以在評價信息時將主因子的方差貢獻率作為權重,計算各信息在3 個主因子的得分與相應權重乘積的累計和作為該信息的綜合得分,即

式中:FAC3_1 為各信息在主因子3 的得分。根據綜合得分從高到低排序得出各信息的重要度排序結果(見表7)。
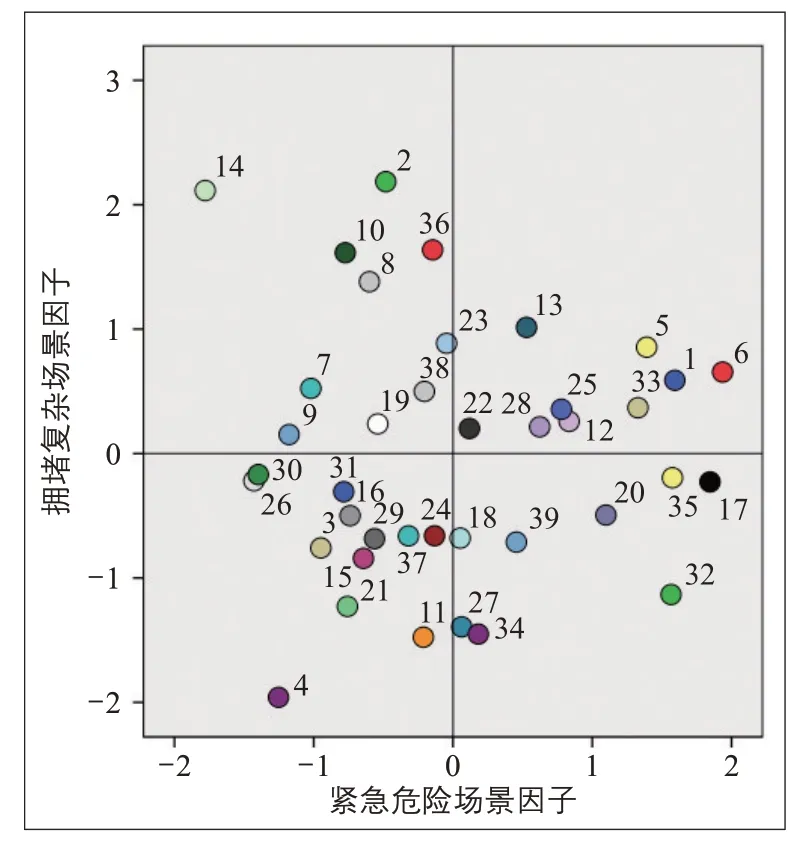
圖2 監控任務組具體信息在兩個主因子的二維排序Fig.2 Factor scores of detailed information of controlled tasks
由表7 可知,綜合得分較高的前幾條信息為車輛當前行駛速度、當前行駛速度制動距離、輔助系統的狀態(是否開啟)、當前場景的危險程度、輔助系統處理當前情況的能力、輔助系統對于當前狀況提供的行駛方案、當前路段的交通標志等信息,即當駕駛人在執行第二任務時,其注意力不在駕駛任務上,對輔助系統相關信息的需求增多,而且對車輛周圍駕駛狀況以及道路信息的需求相對減少。文獻[12]同樣認為在自動駕駛狀況下,相比駕駛任務相關信息而言系統相關信息(系統狀況、計劃行駛方案等)變得特別重要。這與表3 的統計結果一致,而與圖3的因子得分情況存在一定差異。圖3 中得分較高的信息基本上是駕駛任務相關信息,而主因子綜合得分結果則側重對輔助系統相關信息的需求。因此,在駕駛人執行第二任務時,除了應提供輔助系統相關信息之外,駕駛任務相關信息也很重要。
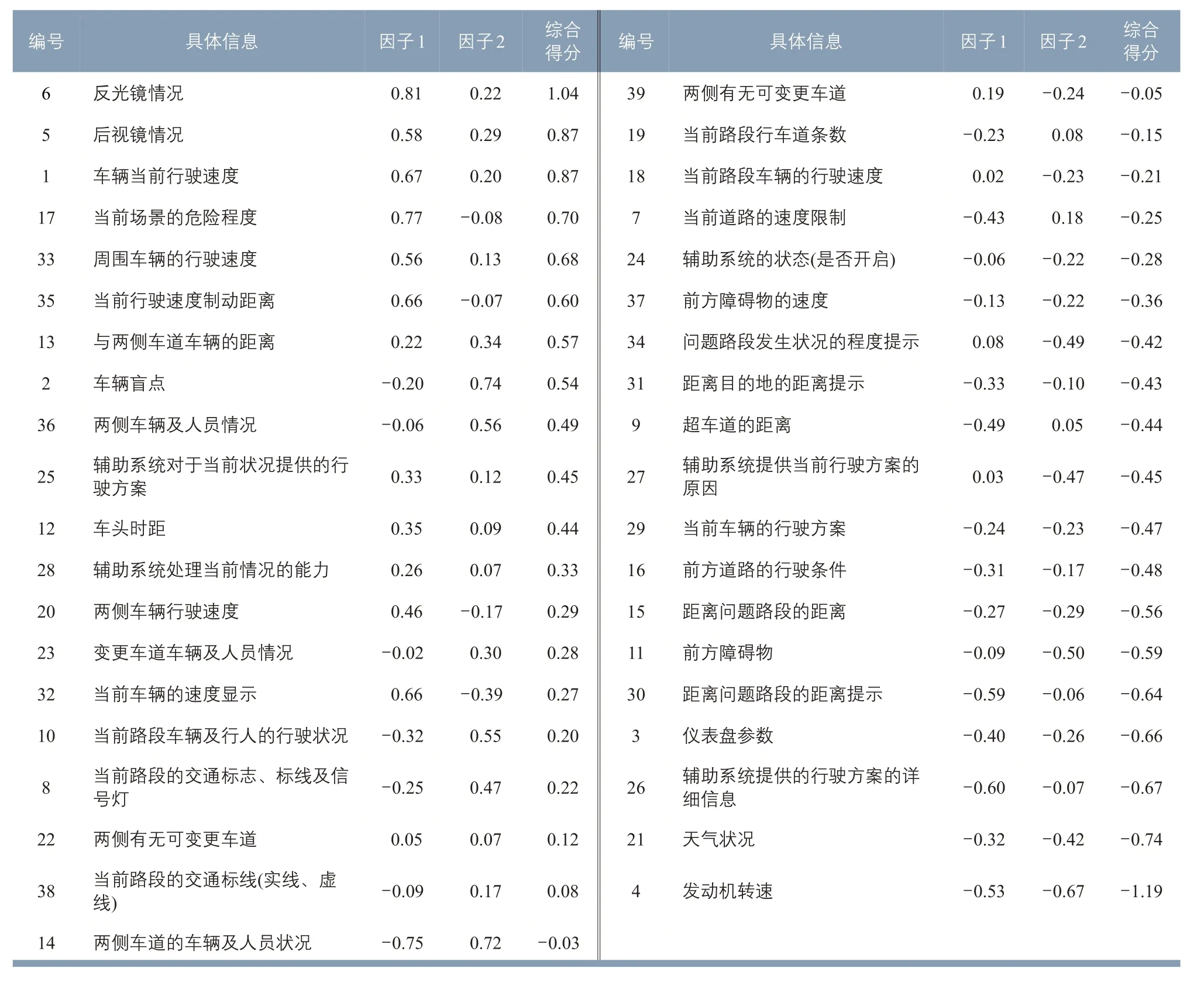
表5 監控任務組具體信息的主因子綜合得分Tab.5 Comprehensive factor score of detailed information of controlled tasks
綜合分析表5 和表7 的數據,發現監控任務組與第二任務組所需信息部分相同,包括車輛當前行駛速度、反光鏡情況、當前場景的危險程度、兩側車輛及人員情況和輔助系統處理當前情況的能力。所以無論是在緊急狀況下還是行駛緩慢的擁堵狀況下,無論駕駛人的注意力是否在駕駛任務上,都需要將這些信息呈現給駕駛人。
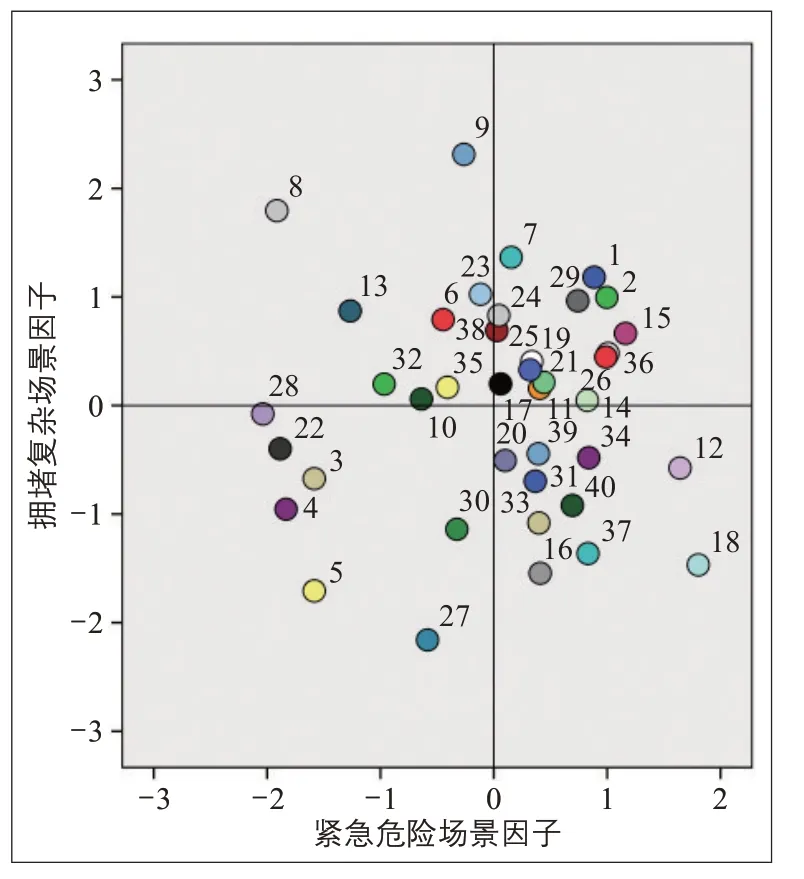
圖3 第二任務組具體信息在兩個主因子的二維排序Fig.3 Factor scores of detailed information of secondary tasks
2.3 眼動結果分析與討論
使用眼動儀的目的是記錄駕駛人在實驗過程中的凝視行為,用于分析駕駛人在監控駕駛任務和第二任務上的注意力分配情況。因此,實驗中定義2 個興趣區(Areas of Interest, AOI),分別為:1)監控駕駛任務AOI,駕駛人通過擋風玻璃觀察當前場景,此時捕捉到的區域為駕駛任務AOI;2)第二任務AOI,由于駕駛人會進行聊天、編輯文檔、看電影三種第二任務,因此一旦捕捉到的區域為編輯文檔畫面、看電影畫面或與實驗人員對視的畫面等一系列與駕駛任務無關的畫面,則這些畫面都將被定義為第二任務AOI。
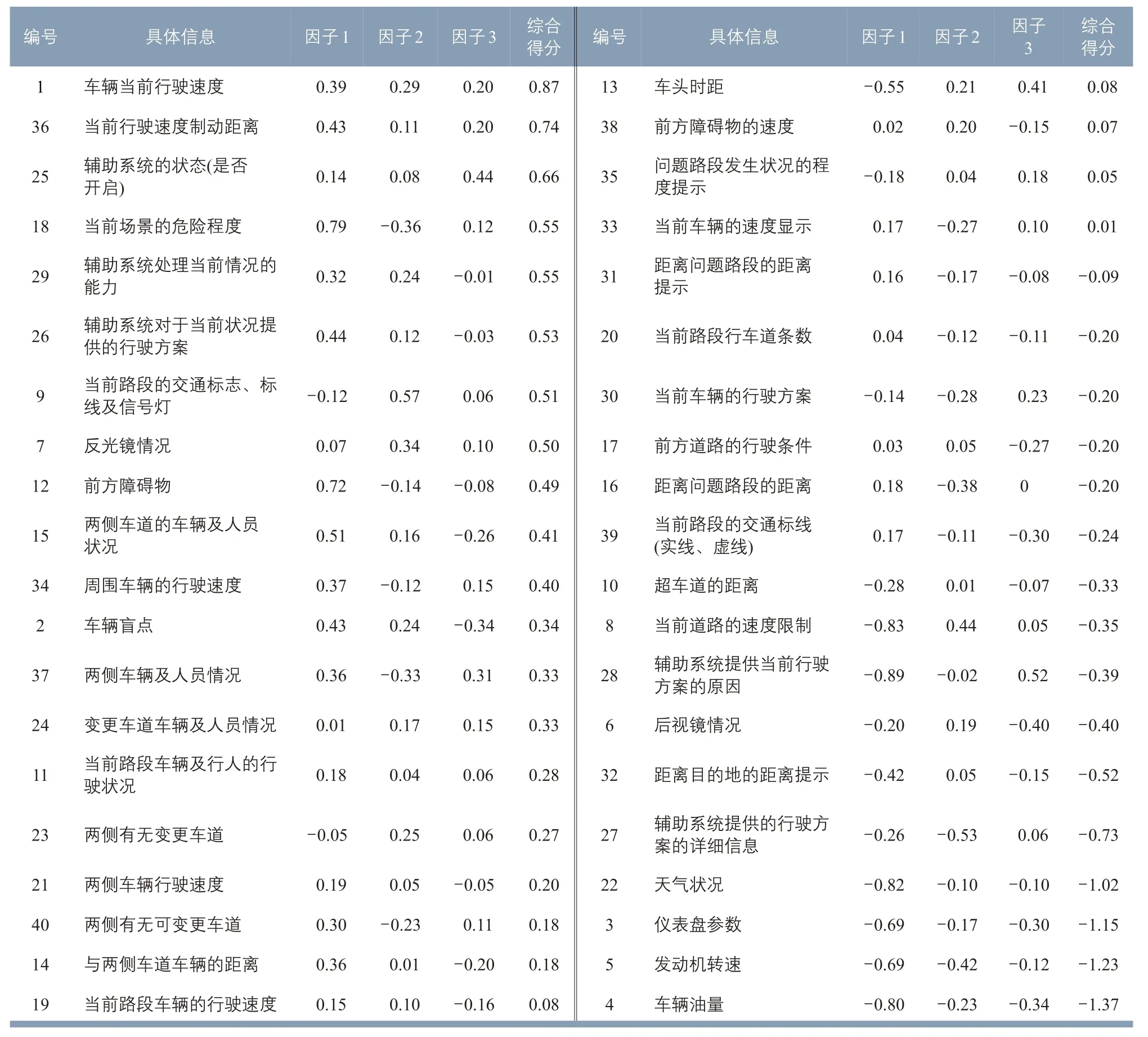
表7 第二任務組具體信息的主因子綜合得分Tab.7 Comprehensive factor scores of detailed information of secondary tasks
由表8 可知,監控駕駛狀態下駕駛人99.85%的注視時間都在監控駕駛任務上,還有0.15%的注意力放在了非監控駕駛任務上,這是因為駕駛人被要求監管車輛駕駛任務。但由于監管任務比較枯燥以及人們對于自動駕駛系統的過度信任會使得駕駛人的警覺性降低[18-19],從而分心并做一些與監管駕駛任務無關的事情,所以存在0.15%的注視時間不在監管駕駛任務上。
而第二任務組中,駕駛人91.38%的注視時間放在第二任務上,僅有8.62%的注視時間放在監控駕駛任務上。在該狀態下,自動駕駛系統能夠完全負責整個車輛的控制,駕駛人只需在系統提示需要幫助的時候接管車輛即可,所以當要求駕駛人做第二任務時,其大部分注意力都會放在第二任務上。然而駕駛人對于自動駕駛系統的信任程度也會影響其注意力的分配,在進行第二任務的時候,駕駛人偶爾會抬頭查看當前場景,觀察路面發生的情況,因此仍有8.62%的注視時間在監控駕駛任務上。一般情況下,越信任自動化,就會更多地參與到第二任務中,然后導致監控駕駛任務的注視點較少[12]。這些研究結果與已知的人—自動化交互信任的重要性一致[18]。
由表9 可知,第二任務組中,由于聊天只需要聽覺不需要視覺的參與,而注視行為完全來自于視覺,所以在聊天狀態下,駕駛人有90.28%的注視時間在監控駕駛任務上,僅有9.72%的注視時間不在監控駕駛任務上。而在編輯文檔和看電影的任務中,由于眼睛需要盯著文檔和電影屏幕,駕駛人有98.40%的注意力都放在第二任務上,僅有1.6%的注意力放在監控駕駛任務上。聊天狀態下的注視時間僅有7 s,遠遠小于編輯文檔和看電影狀態下820.5 s的注視時間,由此發現,在駕駛車輛的過程中,編輯文檔和看電影的第二任務會分散駕駛人的大部分注意力,而聊天的第二任務只會分散小部分注意力。
3 結語
本文探索在城市道路場景中自動駕駛車輛駕駛人的信息需求,即駕駛人與自動駕駛系統交接過程中所需的信息內容。得到主要結論如下:1)在緊急危險場景中,駕駛人更需要周圍車輛行駛速度、與兩側車輛的距離、車頭時距等信息,以便及時采取換道、制動等措施;2)在行駛緩慢的擁堵場景中,駕駛人更需要當前道路的相關信息(如交通標志、車道條數等)。研究還發現,無論駕駛人的注意力是否集中在監控駕駛任務上,以下一些重要信息都應該提供給駕駛人:1)車輛自身相關信息(如當前行駛速度、制動距離等);2)車輛周圍狀況(如兩側車輛及行人狀況);3)當前場景的危險程度;4)輔助系統處理當前場景的能力。
當駕駛人處在監控駕駛狀態時,會注意更多與駕駛相關的信息。而對于有第二任務的駕駛人,他們會將更多的注意力放到第二任務上,并且第二任務越復雜,駕駛人越沉浸在處理第二任務當中,對于監控駕駛任務的關注越少。在進行問卷調查時,有些駕駛人由于沉浸于第二任務,完全沒有注意到剛剛的場景發生了什么。這也意味著第二任務的干擾會降低駕駛人的警覺性。所以,當駕駛人處在自動駕駛中的時候,需要以下信息輔助決策:1)車輛行駛速度、制動距離等車輛自身參數信息;2)周圍路況、車況等環境信息;3)輔助系統處理當前場景的能力等輔助系統相關信息。
本研究仍有許多不足之處,例如第二任務的研究數據較少,實驗變量信息可能不全面,命名也缺乏科學性。下一步的研究是如何采用抬頭顯示器的方式將這些必要信息呈現給駕駛人而又不會對其注意力造成干擾。
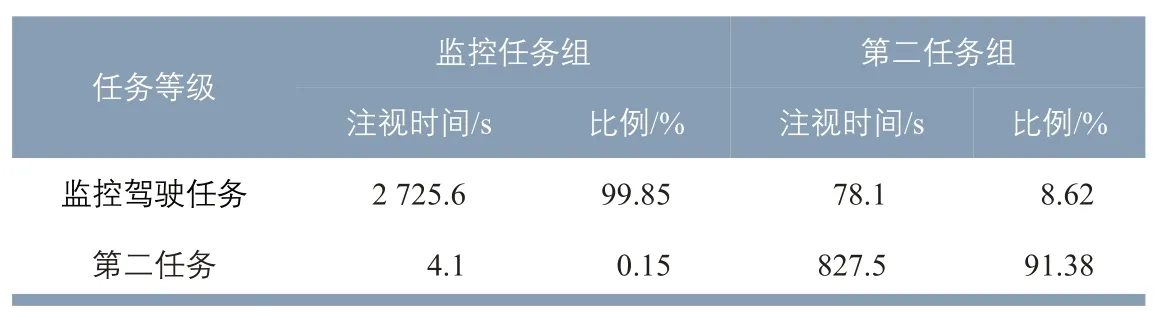
表8 眼動儀數據Tab.8 Eye tracker data

表9 第二任務組的注視時間Tab.9 Fixation time of secondary tasks
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中外會展(2014年4期)2014-11-27 07:46:46