空間曲線平移并聯機構構型綜合與分類
2019-06-27 06:06:52葉梅燕石志新羅玉峰
農業機械學報 2019年6期
關鍵詞:特征
葉梅燕 石志新 羅玉峰,3
(1.南昌大學機電工程學院, 南昌 330031; 2.南昌大學理學院, 南昌 330031;3.華東交通大學機電與車輛工程學院, 南昌 330013)
0 引言
在管道焊接、曲面加工、軌跡追蹤等工程應用中,人們通常期望設計出執行構件能夠沿空間曲線運動的機械裝備。目前人們的設計思路大多基于外在幾何觀點(將空間曲線嵌入外圍3維歐氏空間),即設計一個三平移機構,通過算法協調控制3個方向的移動輸出,實現執行構件沿指定空間曲線作平移運動。然而根據高斯非歐幾何的內蘊思想(將曲線和曲面本身視為獨立空間),空間曲線屬于1維幾何形體,若采用1自由度的曲線平移機構替代上述三平移機構,則可實現減少自由度、降低控制難度、節約成本的目的。因此,研究簡單、實用的各類曲線平移機構十分必要。
目前機器人機構構型綜合的方法主要有:基于螺旋理論的方法[1-6]、基于位移子群/流形的運動綜合方法[7-11]、基于線性變換與進化形態學的方法[12-13]、基于方位特征集的方法[14-20]以及基于GF集的綜合方法[21-24]。然而,這些理論方法均難以直接應用于具有彎曲平移(沿曲線或曲面平移)運動特征的機構,原因為:①缺少可描述彎曲平移運動特征的表達模型。②過于強調局部運動特征,缺少平移空間整體形態特征。③缺少彎曲平移運動特征的運算規則。對于彎曲平移機構而言,由于移動方向時刻變化,因此局部運動特征不能反映整體形態特征,而且基于線性空間的運動特征求交和求并運算規則不再適用。
本文根據內蘊幾何思想,建立可描述彎曲平移運動特征的表達模型,研究機器人機構末端構件彎曲平移運動的形成機理及其基本類型,制定彎曲平移運動特征的運算規則,并結合實例提出空間曲線平移并聯機構的構型綜合方法。
1 可描述彎曲平移運動特征的表達模型
剛體運動包括平移和轉動2種基本運動類型,因此機器人末端構件的運動特征應由平移特征和轉動特征共同組成。
(1)旋轉特征。轉動特征可由旋轉軸數量和方向來表征。
(2)平移特征。平移運動包括平直移動(沿直線或平面平移)和彎曲平移(沿曲線或曲面平移)2種情況。如平行四邊形機構的連桿作圓周曲線平移運動,3-UU機構[21]的動平臺沿球面作平移運動等。由于彎曲平移的移動方向時刻變化,因此其運動特征需要由平移空間的維數、整體形態以及生成方式三者共同表達。
綜合考慮旋轉特征和平移特征,本文采用的末端構件運動特征描述模型為
(1)
式中M——末端構件的運動特征集
t——平移
p——平移空間的維數(獨立平移數目)
w——平移空間的整體形態
N——平移空間的生成方式
r——轉動
q——獨立旋轉方向矢量的數目
S——旋轉軸方向單位矢量組成的集合
基于內蘊幾何學的基本思想,直線和曲線可被視為1維獨立平移空間,平面和曲面則被視為2維獨立平移空間。0維和3維平移空間無需記錄整體形態和生成方式,故其移動特征可分別表示為t0和t3。0維和3維轉動空間無需記錄旋轉軸方向,其轉動特征分別表示為r0和r3。1維和2維轉動空間的轉動特征分別表示為r1(l)和r2(l1,l2),其中l、l1和l2均為旋轉軸方向的單位矢量。
2 支鏈末端構件彎曲平移運動的形成
由于支鏈(串聯機構)是由若干個運動副依次串聯而成,因此其末端構件的運動特征集是各運動副運動輸出特征的并集,可表示為
(2)
式中ML——支鏈末端構件的運動特征集
2.1 單自由度運動副的運動輸出特征
機器人機構的運動副類型較多,常見運動副包括:轉動副(R副)、移動副(P副)、球副(S副)、胡克鉸(U副)、圓柱副(C副)等。為了分析方便,可采用運動副等效替換的方法將它們簡化為只含轉動副和移動副。如球副等效為3個軸線匯交于1點的轉動副,胡克鉸等效為2個軸線垂直正交的轉動副,圓柱副等效為共軸的轉動副和移動副。
(1)P副的運動輸出特征。由于P副僅產生直線平移運動,其移動空間整體形態為直線,并且該移動空間由P副生成,由式(1)可知,移動副的運動輸出特征可表示為t1(直線,P),其中P為P副方向的單位矢量。
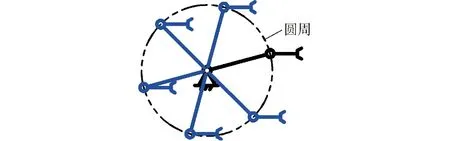
圖1 R‖R機構及其末端構件的平移空間Fig.1 R‖R mechanism and translation space of its end-effector
(2)R副的運動輸出特征。轉動副不僅能產生繞其軸線的運動,而且可衍生出垂直于軸線方向的圓周曲線平移運動,即其運動特征具有二重性,可按如下規則選取:①優先取旋轉運動作為運動輸出特征,記為r1(R),其中R為R副軸線方向的單位矢量。②若已有運動副產生了與該轉動副旋轉方向相同的旋轉運動,則該轉動副將會衍生圓周曲線平移(圖1),此時應取衍生圓周曲線平移作為其運動輸出特征,記為t1(圓,R┴),其中R┴表示由R副衍生且與R垂直的圓周平移運動。

2.2 2維曲面平移運動的形成及其類型
2維曲面平移空間是由2個1維平移空間合并而成,而且二者不能均為直線,即其中至少1個1維平移空間應為圓周。
2.2.1t1(直線)與t1(圓)的求并運算規則
由2.1節可知,1維圓周平移空間存在2種生成方式:一種由Pa副產生,另一種為兩平行R副衍生而成。
高校的課程設置不僅決定一個專業的定位,決定專業的寬度和廣度,更決定未來所培養學生的視野、知識儲備、專業傾向等綜合素質,是高校辦學中非常重要的環節。地方本科高校無論歷史沉淀、師資力量、學生素質還是整體綜合實力,與綜合性大學相比,差距都是非常大的。在這種情況下,扎根當地,發掘能夠體現地方價值與特色的課程就顯得尤為重要。

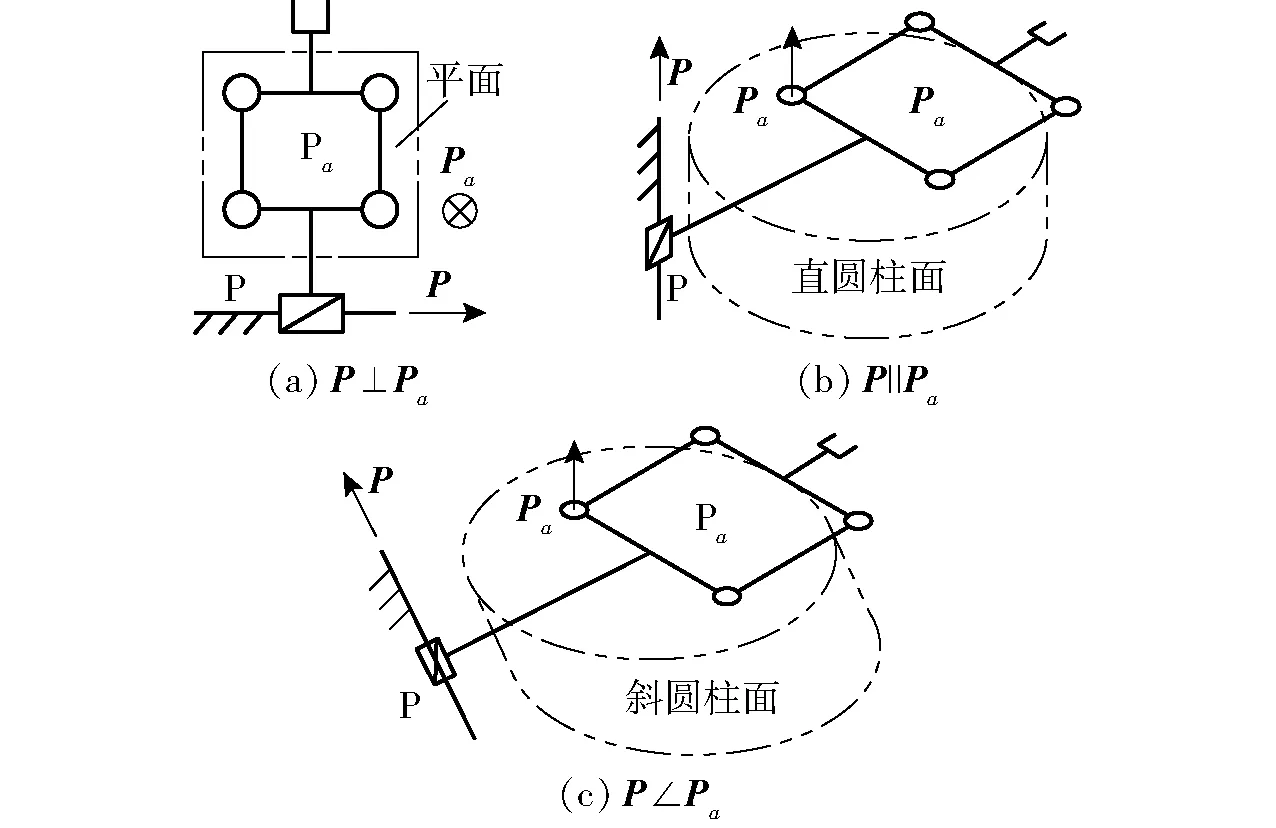
圖2 P-Pa機構及其末端構件的平移空間Fig.2 P-Pa mechanisms and translation spaces of theirs end-effector
(2)當1維圓周平移空間由兩平行R副衍生而成時,P副與它們在各種裝配關系下的合成2維平移空間如圖3所示,因此t1(直線,P)與t1(圓,R┴)的求并結果如下:
當P⊥R時,二者合成的平移空間為平面(圖3a),故此時t1(直線,P)與t1(圓,R┴)的求并結果記為t2(平面,R)。
當P‖R時,二者合成的平移空間為直圓柱面(圖3b),故此時t1(直線,P)與t1(圓,R┴)的求并結果為t2(直圓柱面,P⊕R┴)。
當P∠R且P副位于兩平行R副兩邊時,二者合成的平移空間為斜圓柱面(圖3c),故此時t1(直線,P)∪t1(圓,R┴)=t2(斜圓柱面,P⊕R┴)。
當P∠R且P副位于兩平行R副中間時,二者合成的平移空間為圓錐面(圖3d),故此時t1(直線,P)∪t1(圓,R┴)=t2(圓錐面,P⊕R┴)。
RPR機構(圖3)的末端構件除了具有2維平移特征外還具有繞R旋轉的1維轉動特征。
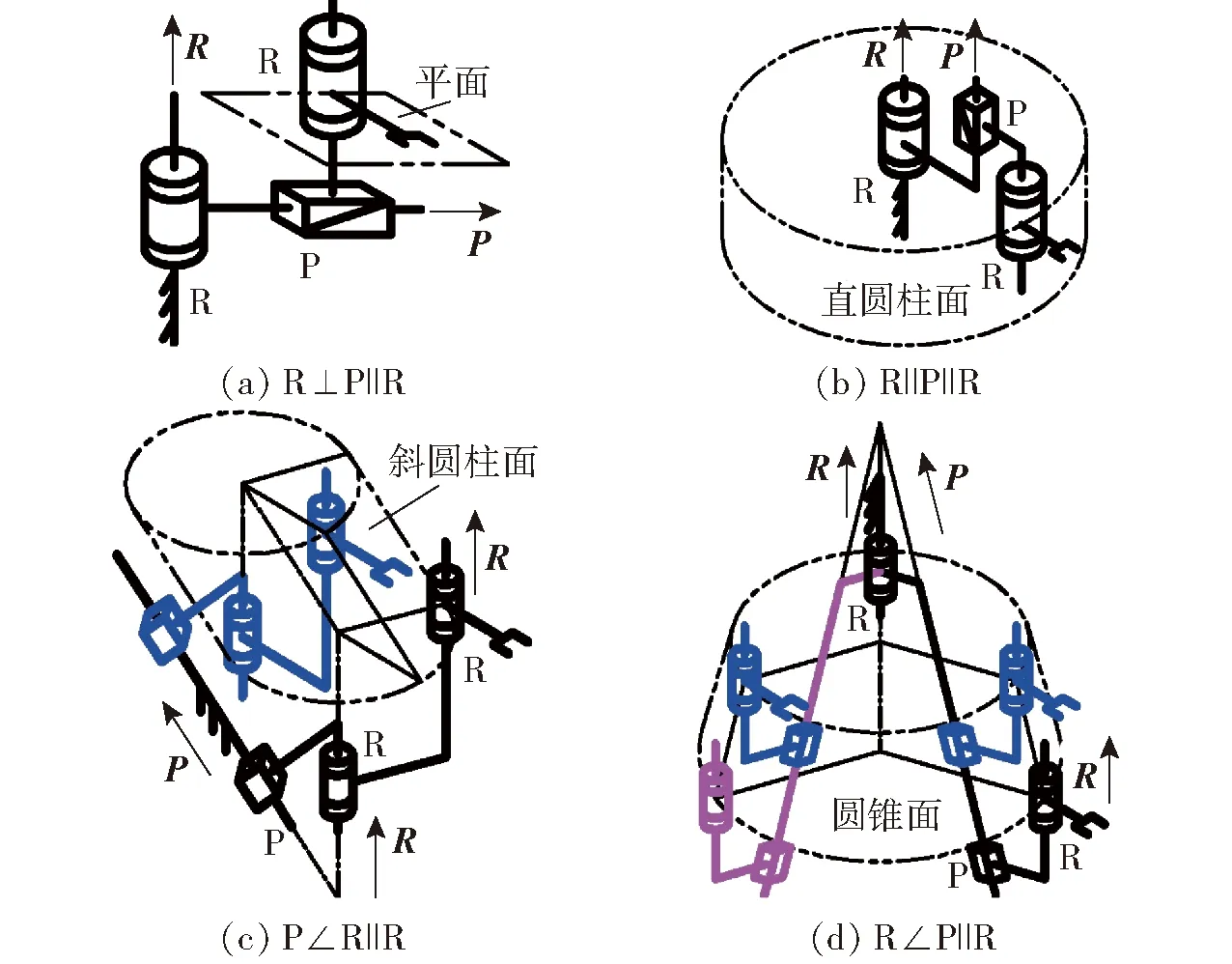
圖3 RPR機構及其末端構件的平移空間Fig.3 RPR mechanisms and translation spaces of theirs end-effector
2.2.2t1(圓)與t1(圓)的求并運算規則
兩圓周平移存在3種生成方式:兩圓周平移均由Pa副產生、兩圓周平移均由R副產生、兩圓周平移分別由Pa副和R副產生。由于上述3種生成方式下的合成平移空間類型均相同,因此無需分別討論。
兩圓所在的平面存在平行、相交(包括垂直和斜交)2種位置關系,且兩圓心的位置存在重合與不重合2種情況。上述各種方位關系對應的機構示例如圖4所示。


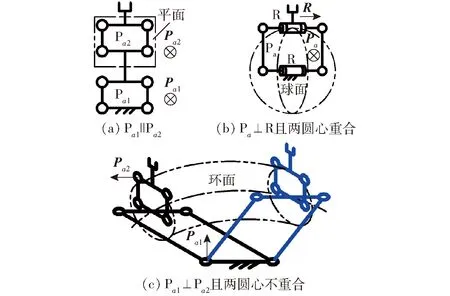
圖4 兩圓周平移合成各類2維空間的實例Fig.4 Examples of 2-dimension space generated by two circular-translation motion
綜合上述分析結果可以得出,支鏈末端構件的2維曲面平移空間存在圓柱面(包括直圓柱面和斜圓柱面)、圓錐面、球面、環面這4種基本類型。
3 空間曲線平移并聯機構的構型綜合
3.1 空間曲線平移并聯機構的基本類型
并聯機構由靜平臺(機架)、動平臺以及若干條支鏈組成。由于動平臺是在各支鏈共同作用下進行運動,因此其運動特征是各支鏈末端構件運動特征的交集。又考慮到空間曲線可看作空間兩曲面的交線,因此空間曲線平移并聯機構可由2條具有2維彎曲平移運動特征的支鏈構成。
根據第2節分析結果可知,支鏈末端構件的2維曲面平移空間存在4種形態(圓柱面、圓錐面、球面、環面)。考慮到這些曲面兩兩的交集一般為1條空間曲線(稱為相貫線),因此空間曲線平移并聯機構可按曲線形態劃分為9種基本類型:柱柱相貫線平移機構、柱錐相貫線平移機構、柱球相貫線平移機構、柱環相貫線平移機構、錐錐相貫線平移機構、錐球相貫線平移機構、錐環相貫線平移機構、球環相貫線平移機構和環環相貫線平移機構。兩球面的交線為圓(屬于平面曲線),它不屬于空間曲線。
本文僅對上述9種基本類型中的前2類并聯機構進行構型綜合,其余7類機構可以采用類似方法綜合得到。
3.2 柱柱相貫線平移機構構型綜合
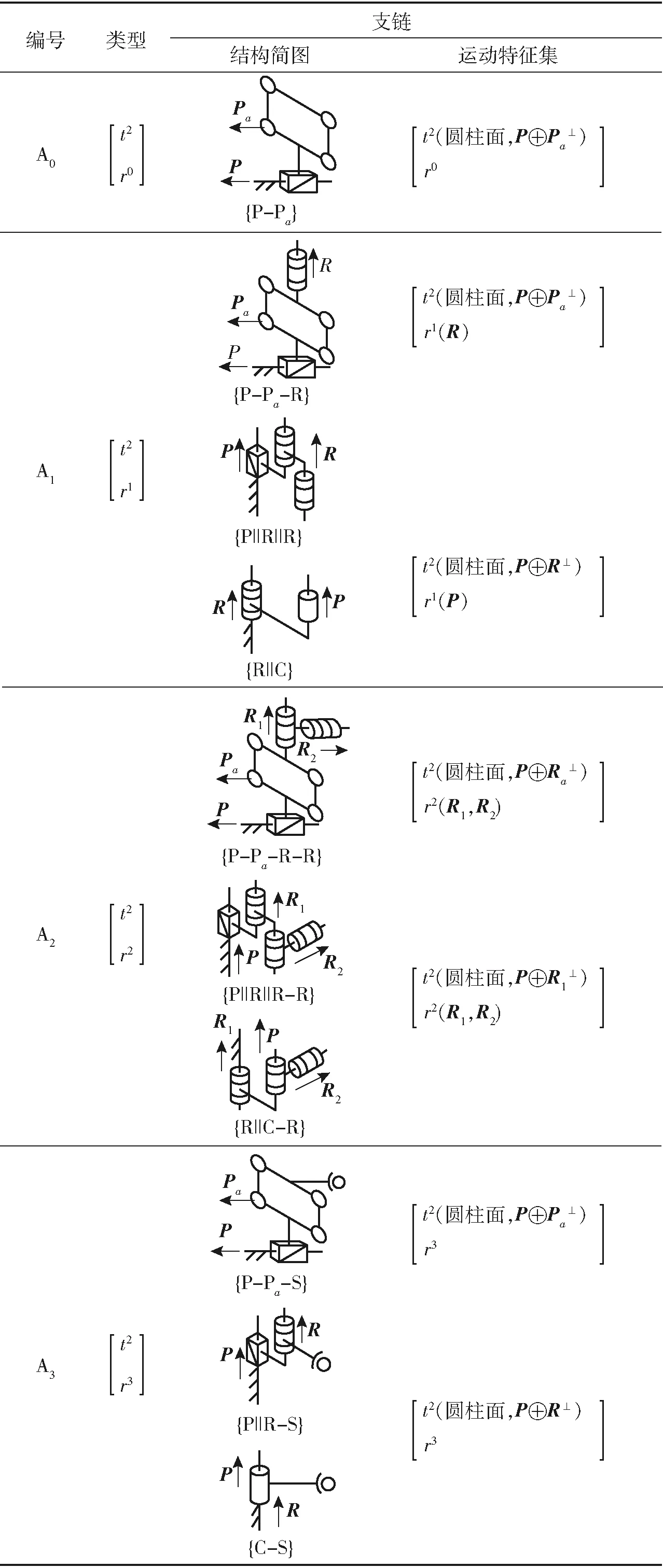
3.2.1具有2維圓柱面平移特征的支鏈
根據2.2.1節分析結果可知,2維圓柱面平移空間由直線平移和圓周平移合成產生,并且直線和圓所在的平面不能平行。具有2維圓柱面平移特征的支鏈結構類型如表1所示。
表1 具有2維圓柱面平移特征的支鏈
Tab.1 Branches with 2-dimension cylindertranslation characteristic
3.2.2支鏈組合方案
根據3.1節分析結果可知,柱柱相貫線平移機構可由表1中某2條支鏈(記為支鏈1和支鏈2)構成。為保證動平臺沿柱柱相貫線作純平移運動(不含轉動),支鏈1、2的組合方案如表2所示。
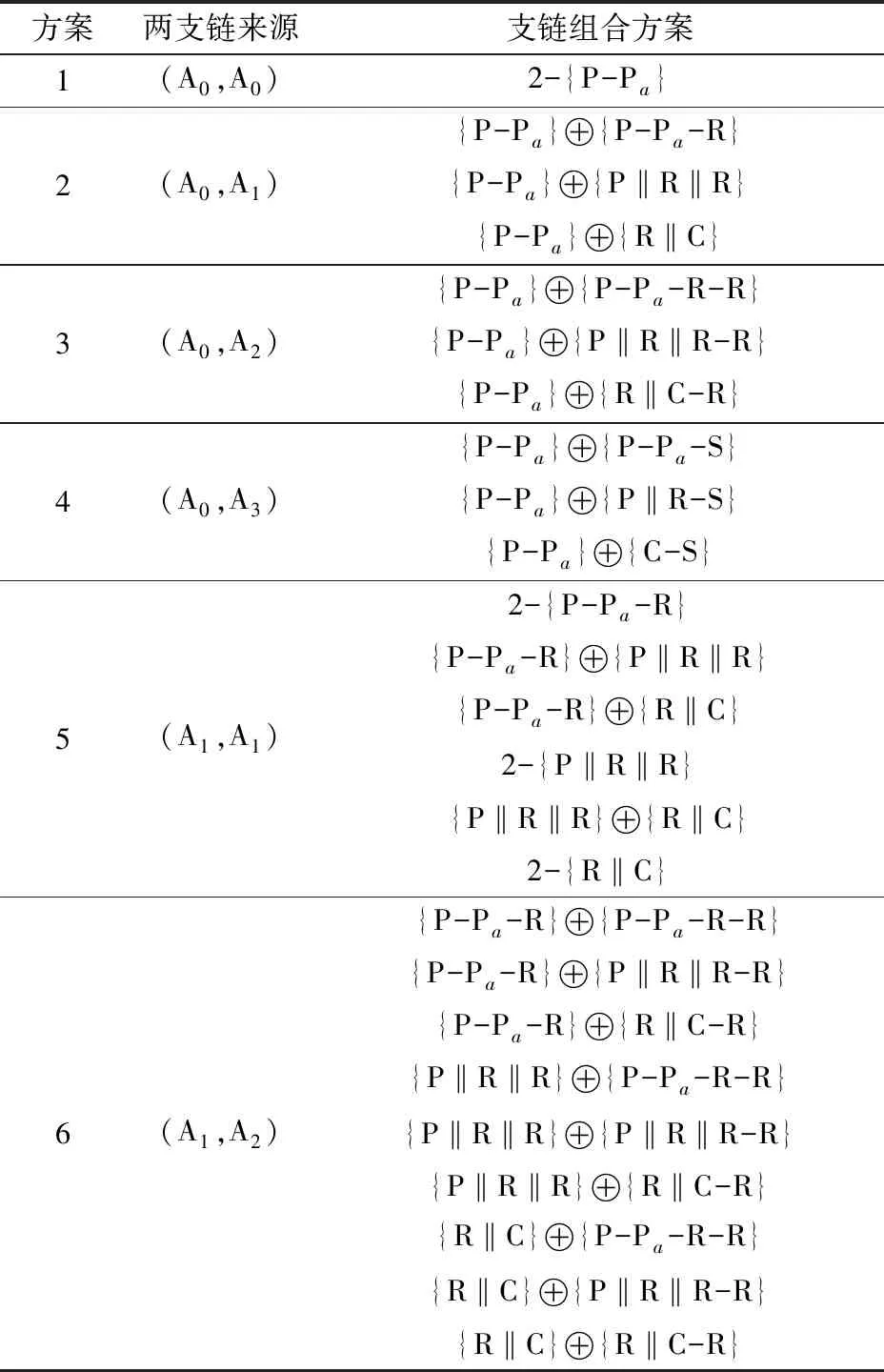
表2 柱柱相貫線平移機構支鏈組合方案Tab.2 Branch assembling schemes of cylinder-cylinder intersection line translation mechanisms
3.2.3支鏈裝配幾何條件
(1)t2(圓柱面)與t2(圓柱面)的求交運算規則
當兩圓柱面的軸線平行時,二者的交線為平行于軸線的直線;否則,二者的交線為空間曲線(柱柱相貫線)。因此,2維彎曲平移特征t2(圓柱面)與t2(圓柱面)的求交運算規則為

(3)

(2)兩支鏈裝配幾何條件分析
根據預期設計目標,支鏈1和支鏈2的運動特征集應滿足
(4)
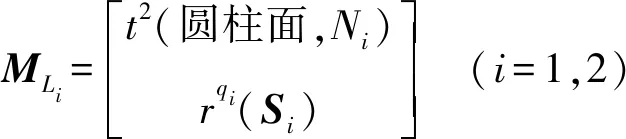
式中qi——支鏈i末端構件旋轉方向矢量的數目
Si——支鏈i末端構件旋轉方向單位矢量組成的集合
結合式(3),可知式(4)成立的條件為P1與P2不平行且S1∩S2=?(空集)。因此表2中各組合方案對應裝配條件如下:
(1)組合方案1~4。支鏈1、2分別為表1中支鏈結構類型庫A0和Ai(i=0,1,2,3)。由于支鏈1的轉動特征為r0(表1),故此時S1∩S2=?恒成立,因此支鏈1、2的裝配條件為P1與P2不平行。
(2)組合方案5。支鏈1、2均為表1中支鏈結構類型庫A1,二者的轉動特征可分別記為r1(R1)和r1(R2)。此時S1∩S2=?成立的充要條件為R1與R2不平行,因此支鏈1、2的裝配條件為P1與P2不平行且R1與R2不平行。
(3)組合方案6。支鏈1、2分別為支鏈結構類型庫A1和A2,二者轉動特征分別為r1(R)和r1(R1,R2)(表1)。此時S1∩S2=?成立的條件為R與R1、R2均不平行,故支鏈1、2的裝配條件為P1與P2不平行且R與R1、R2均不平行。
3.2.4柱柱相貫線平移機構
根據上述支鏈組合方案和裝配幾何條件,可綜合得到25種柱柱相貫線平移機構。表2中組合方案1~6生成的代表性機構如圖5所示。
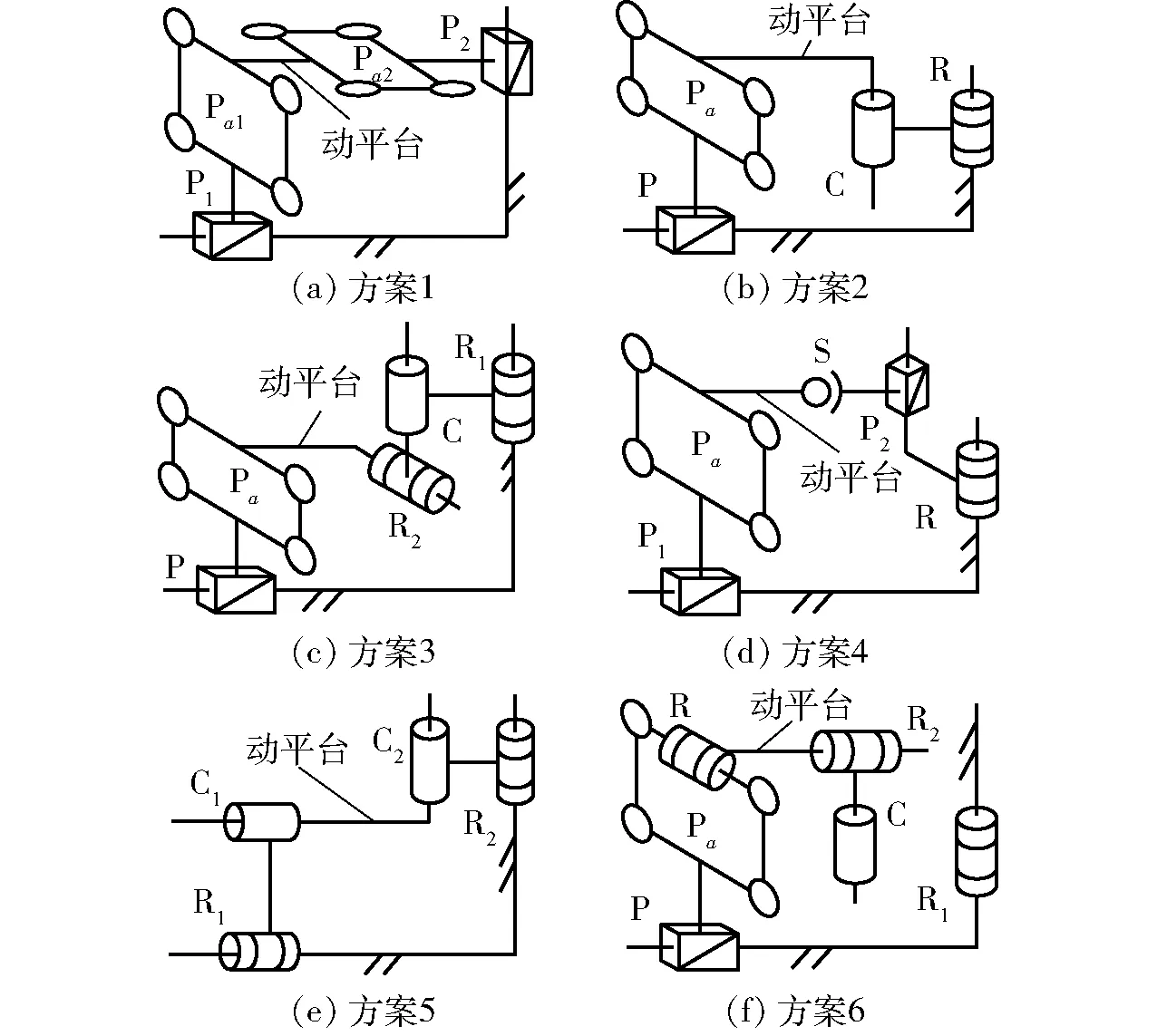
圖5 表2各組合方案生成的代表性并聯機構Fig.5 Representative mechanisms generated by assembling schemes in Tab.2
3.2.5分析驗證
以圖5e所示機構為例,分析該機構動平臺的運動特征。
已知兩支鏈末端構件運動特征集為
其中Pi為圓柱副Ci軸線方向單位矢量。故二者的并集為
(5)
根據自由度計算公式[14]可知,該機構自由度為
式中fi——第i個運動副的自由度
dim——維數函數
由于R1與R2不平行,r1(R1)∩r1(R2)=r0,故該機構的動平臺不含轉動輸出,又由于自由度F等于1,因此該機構的動平臺僅沿兩圓柱相貫線作彎曲平移運動(圖6)。
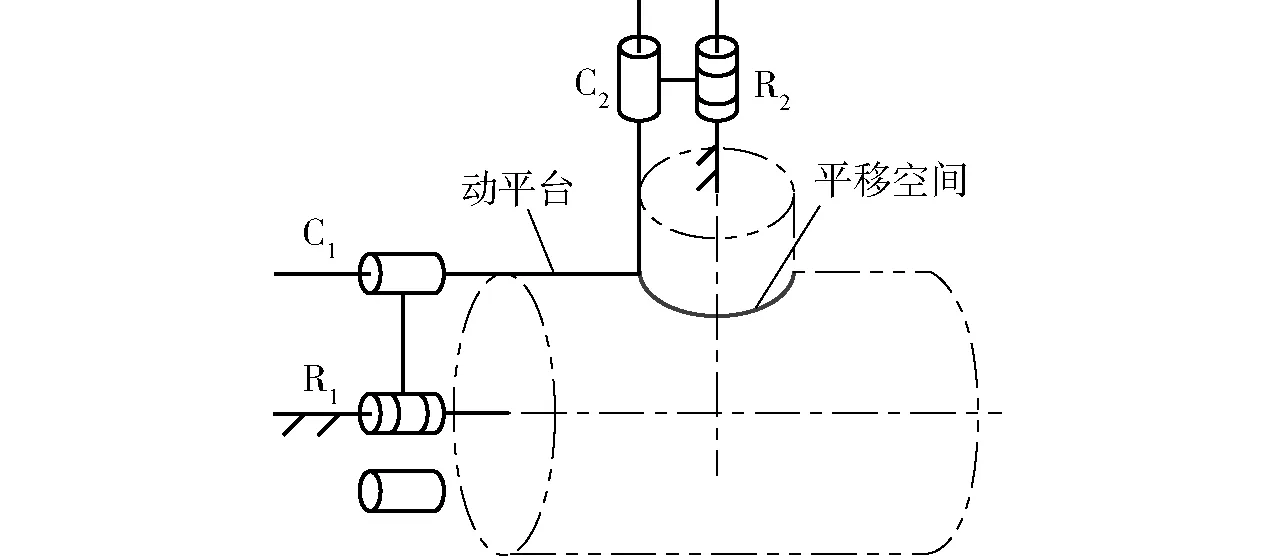
圖6 R‖C-C‖R機構及其動平臺的平移空間Fig.6 R‖C-C‖R mechanism and translation space of its end-effector
3.3 柱錐相貫線平移機構構型綜合
3.3.1具有2維圓錐面平移特征的支鏈
根據2.2.1節分析結果可知,2維圓錐面平移空間產生的條件為P副位于兩平行R副中間且P∠R。因此,具有2維圓錐面平移特征的支鏈結構類型如表3所示。
3.3.2支鏈組合方案
根據3.1節分析結果可知,可從表1、3中分別挑選1條支鏈(記為支鏈1和支鏈2),二者共同構成柱錐相貫線平移機構。為保證動平臺僅沿柱錐相貫線作純平移運動(不含轉動),支鏈1、2的組合方案如表4所示。
3.3.3支鏈裝配幾何條件
為保證動平臺無轉動輸出,兩支鏈末端構件轉動特征集的交集應為空集(即S1∩S2=?),因此表4中各組合方案對應裝配條件如下:
(1)組合方案1~3。支鏈1均取自表1中支鏈結構類型庫A0。由于支鏈1的轉動特征為r0,故此時S1∩S2=?恒成立,因此支鏈1、2可任意裝配。
表3 具有2維圓錐面平移特征的支鏈
Tab.3 Branches with 2-dimension conetranslation characteristic
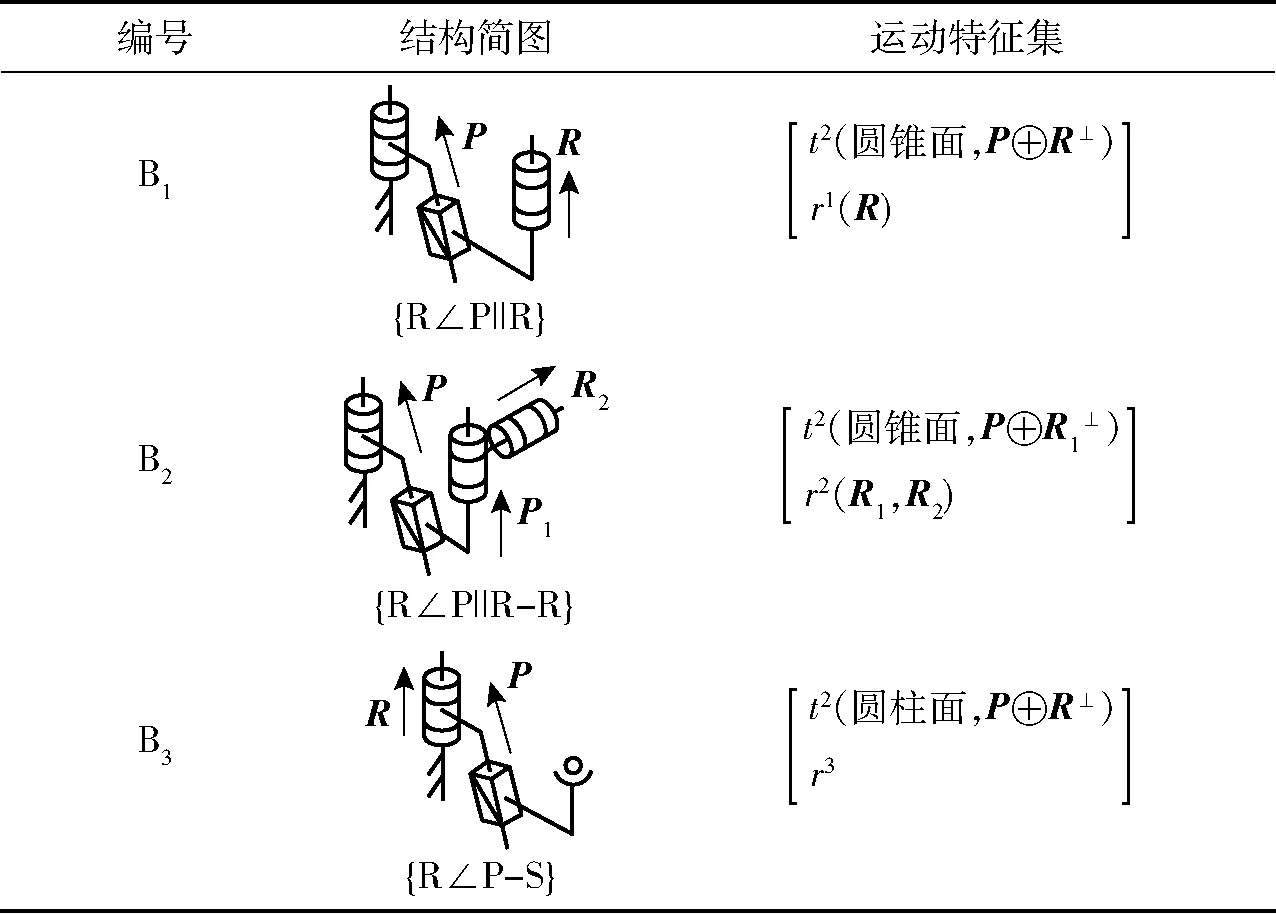
表4 柱錐相貫線平移機構支鏈組合方案Tab.4 Branch assembling schemes of cylinder-cone intersection line translation mechanisms
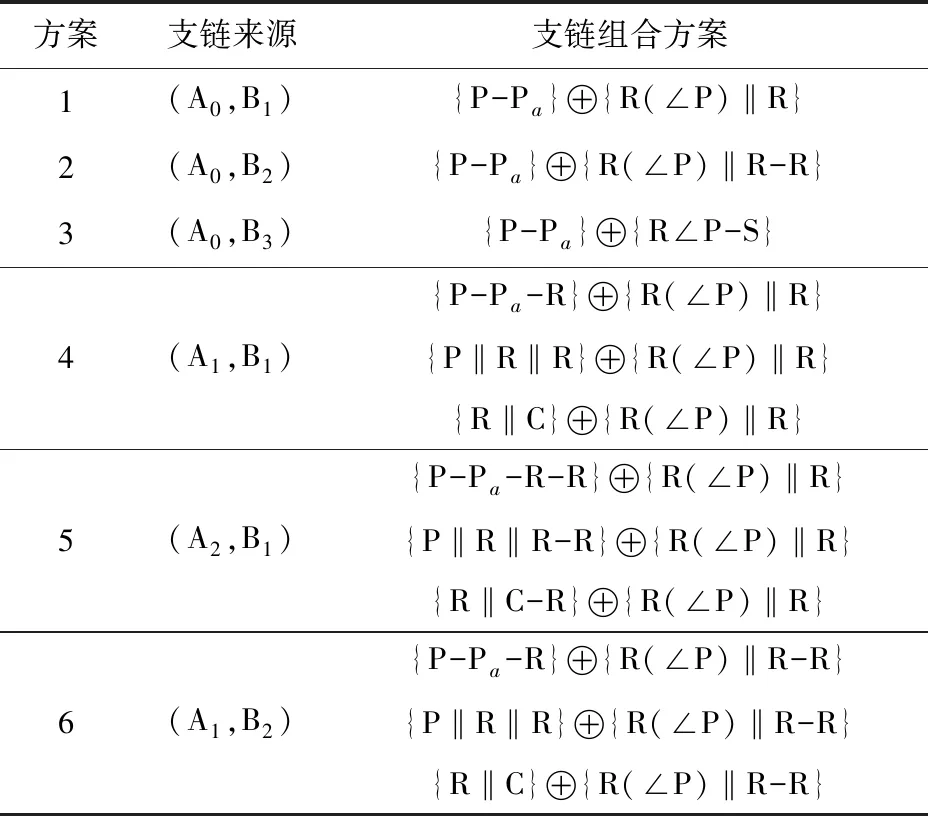
方案支鏈來源支鏈組合方案1(A0,B1){P-Pa}{R(∠P)‖R}2(A0,B2){P-Pa}{R(∠P)‖R-R}3(A0,B3){P-Pa}{R∠P-S}4(A1,B1){P-Pa-R}{R(∠P)‖R}{P‖R‖R}{R(∠P)‖R}{R‖C}{R(∠P)‖R}5(A2,B1){P-Pa-R-R}{R(∠P)‖R}{P‖R‖R-R}{R(∠P)‖R}{R‖C-R}{R(∠P)‖R}6(A1,B2){P-Pa-R}{R(∠P)‖R-R}{P‖R‖R}{R(∠P)‖R-R}{R‖C}{R(∠P)‖R-R}
(2)組合方案4。支鏈1取自表1中類型庫A1,支鏈2取自表4中類型庫B1,二者的轉動特征分別記為r1(R1)和r1(R2)。此時S1∩S2=?成立的充要條件為R1與R2不平行,因此支鏈1、2的裝配條件為R1與R2不平行。
(3)組合方案5和6。支鏈1、2分別取自類型庫A2和B1(或A1和B2),二者的轉動特征可分別記為r1(R1,R2)和r1(R),此時S1∩S2=?成立的條件為R與R1、R2均不平行。因此支鏈1、2的裝配條件為R與R1、R2均不平行。
3.3.4柱錐相貫線平移機構
根據3.3.2節得到的支鏈組合方案和裝配幾何條件,共可綜合得12種柱錐相貫線平移機構。圖7僅列舉了表4中各組合方案生成的部分代表性機構。根據自由度計算公式可計算得出,該類機構自由度為1。又由于兩支鏈末端構件轉動特征集的交集為空集,因此動平臺不含轉動輸出,僅能沿柱錐相貫線作平移運動。
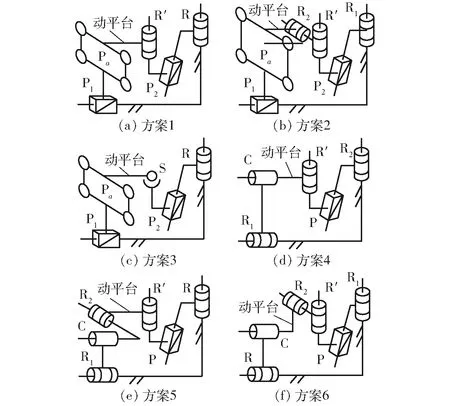
圖7 表4各組合方案生成的代表性并聯機構Fig.7 Representative mechanisms generated by assembling schemes in Tab.4
4 結論
(1)基于高斯非歐幾何的內蘊思想,可將曲線和曲面本身視為彎曲平移空間。這些空間的維數、整體形態以及生成方式能夠清晰表達末端構件的彎曲平移運動特征。
(2)支鏈末端構件的2維彎曲平移空間存在圓柱面(包括直圓柱面和斜圓柱面)、圓錐面、球面、環面4種基本類型。
(3)根據平移空間的整體形態,空間曲線平移機構可被劃分為9種基本類型。類型細分不僅能夠豐富和完善現有機構類型庫,而且有利于設計者根據實際工況作出合理選擇。
(4)綜合得到了25種柱柱相貫線平移機構和12種柱錐相貫線平移機構,并給出了代表性機構。與三平移機構相比,這些空間曲線平移機構具有自由度小(等于1)、結構簡單、控制容易等特點。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38