基于Fuzzy-PID的磁懸浮列車速度控制系統(tǒng)
2019-06-27 01:48:48張夢鄉(xiāng)陳建政
科技創(chuàng)新與應(yīng)用 2019年8期
張夢鄉(xiāng) 陳建政
摘? 要:磁浮列車運(yùn)行控制是一個(gè)復(fù)雜的非線性控制系統(tǒng),基于傳統(tǒng)PID算法的速度控制器不能消除時(shí)變干擾影響,動態(tài)性能差。文章提出基于Fuzzy-PID控制的磁懸浮列車速度閉環(huán)跟蹤控制算法,利用模糊邏輯在線計(jì)算PID參數(shù)修正量。數(shù)據(jù)仿真試驗(yàn)結(jié)果表明,F(xiàn)uzzy-PID控制可以明顯改善速度閉環(huán)控制器的響應(yīng)特性,提高列車運(yùn)行控制系統(tǒng)的動態(tài)性能。
關(guān)鍵詞:磁懸浮列車;Fuzzy-PID算法;運(yùn)行控制
中圖分類號:U237 文獻(xiàn)標(biāo)志碼:A? ? ? ? ?文章編號:2095-2945(2019)08-0014-03
Abstract: Maglev train operation control is a complex nonlinear control system. the speed controller based on traditional PID algorithm cannot eliminate the influence of time-varying interference and has poor dynamic performance. In this paper, a closed-loop tracking control algorithm for maglev train speed based on Fuzzy-PID control is proposed, and the PID parameter correction is calculated online by fuzzy logic. The results of data simulation test show that Fuzzy-PID control can obviously improve the response characteristics of the speed closed-loop controller and improve the dynamic performance of the train operation control system.
Keywords: maglev train; Fuzzy-PID algorithm; operation control
引言
磁浮列車安全性高、選線靈活、乘坐舒適性好、無污染、占地少,是解決大中城市交通問題的有效方法[1][2]。其安全高效運(yùn)行依賴于控制系統(tǒng)在安全速度域內(nèi)精確、無時(shí)延的計(jì)算并跟蹤理想速度運(yùn)行,因此,設(shè)計(jì)一個(gè)跟蹤性能良好的速度閉環(huán)控制器是磁浮列車運(yùn)行控制的關(guān)鍵[3][4]。
由于磁懸浮交通系統(tǒng)具有軌道不平順、空氣阻力、電磁渦流阻力、懸浮氣隙動態(tài)變化等特點(diǎn),一般很難建立準(zhǔn)確的列車運(yùn)行動態(tài)模型[4-6]。傳統(tǒng)PID控制設(shè)計(jì)速度閉環(huán)控制器控制規(guī)律過于簡單,無法適應(yīng)各階段系統(tǒng)模型變化。Fuzzy-PID控制把專家的經(jīng)驗(yàn)表示成模糊語言描述的控制規(guī)則,在被控對象控制模型存在誤差的情況下,通過在線調(diào)整參數(shù)就能達(dá)到良好的控制效果,對復(fù)雜、建模困難的系統(tǒng)均能有效控制,非常適用于具有時(shí)變干擾和非線性的磁浮列車運(yùn)控系統(tǒng)[7][8]。
本文以某建設(shè)中試驗(yàn)線為工程背景,設(shè)計(jì)了基于Fuzzy-PID控制的速度閉環(huán)控制器,跟蹤理想速度曲線運(yùn)行,改善運(yùn)行控制系統(tǒng)動態(tài)性能。
1 磁浮列車運(yùn)控模型
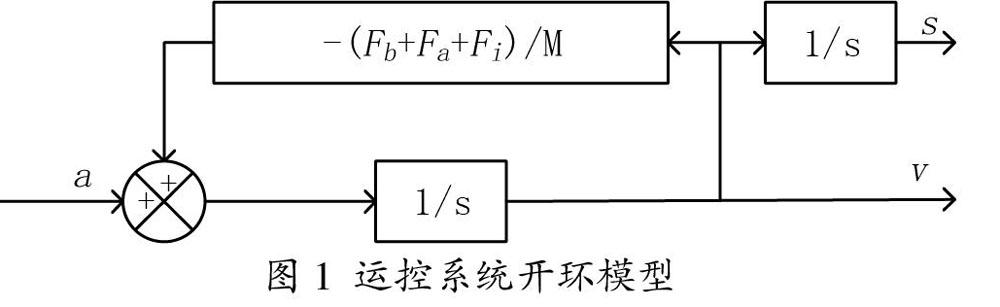
磁浮列車在運(yùn)行過程中沿軌道方向的合力F可表達(dá)為電磁牽引力Fq、電磁渦流阻力Fb、空氣阻力Fa和坡道阻力Fi的合力[4],如式(1)和式(2)所示。
其中,n為列車編組個(gè)數(shù),M為列車質(zhì)量,ψd、ψq和id、iq 分別為定子繞組的磁鏈分量和電流分量,Pl為空氣密度, Cx為空氣阻尼系數(shù),Sf為列車前端面積,I(s)為坡度的分段千分度函數(shù)。
由于列車速度v、加速度a、位置s滿足基本運(yùn)動學(xué)方程a=dv/dt,v=ds/dt。根據(jù)F=Ma和式(1)可得磁浮列車運(yùn)控系統(tǒng)的非線性開環(huán)傳遞模型,如圖1所示。
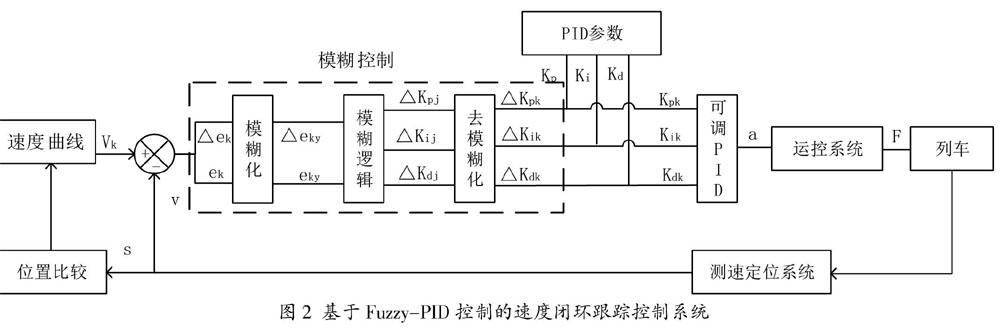
基于Fuzzy-PID控制的速度控制系統(tǒng)如圖2所示,模糊控制器通過在線調(diào)整PID比例系數(shù)KP、微分系數(shù)Kd和積分系數(shù)Ki的修正量ΔKP、ΔKd、ΔKi,使得該系統(tǒng)具有適應(yīng)時(shí)變性和非線性的優(yōu)點(diǎn),并提高了系統(tǒng)的動態(tài)響應(yīng)性能。
2 基于Fuzzy-PID控制的速度閉環(huán)控制器
模糊控制器主要由輸入模糊化部分、模糊邏輯部分、輸出去模糊化三部分構(gòu)成[7]。輸入為量化后的速度偏差和偏差變化率,輸出為三個(gè)PID修正量。
2.1 輸入模糊化
將k時(shí)刻的輸入偏差ek和偏差變化率Δek線性變換到模糊控制器論域范圍[-3,3],實(shí)際的輸入范圍為[ymin,ymax],變換公式表示為:
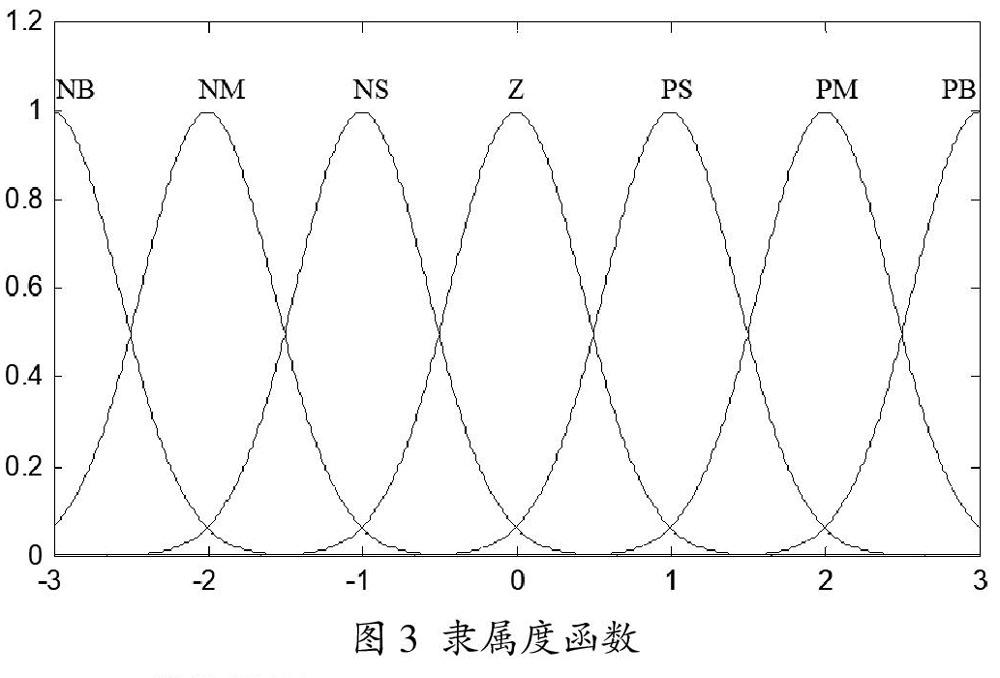
用一組模糊語言名稱{NB,NM,NS,ZO,PS,PM,PB}來衡量輸入的大小,分別表示{負(fù)的較大值,負(fù)的中等值,負(fù)的較小值,零,正的較小值,正的中等值,正的較大值}。
每一個(gè)模糊語言為一個(gè)模糊集合,取高斯函數(shù)f(x)為隸屬度函數(shù)[8],如圖3所示。對于任何一個(gè)輸入的精確值,均可以計(jì)算其隸屬于每個(gè)模糊集合的概率,進(jìn)而將精確值作模糊處理,確定輸入偏差ek和偏差變化率Δek所屬的模糊集合。
2.2 模糊規(guī)則
PID各參數(shù)對系統(tǒng)影響各不相同,比例系數(shù)KP、微分系數(shù)Kd和積分系數(shù)Ki分別調(diào)整控制系統(tǒng)動態(tài)響應(yīng)指標(biāo)中的響應(yīng)速度、動態(tài)特性和穩(wěn)態(tài)誤差。由于每個(gè)輸入均有7個(gè)所屬模糊集合,故雙輸入模糊控制器需設(shè)定49條模糊控制規(guī)則,其對PID參數(shù)整定的基本原則是:當(dāng)偏差較大,應(yīng)取較大的KP,以達(dá)到迅速調(diào)整誤差的效果;當(dāng)偏差中等時(shí),選取較小的KP和適當(dāng)?shù)腒i、Kd,避免系統(tǒng)超調(diào)量過大;當(dāng)偏差較小時(shí),選用較大的KP和Ki,提高系統(tǒng)穩(wěn)態(tài)性能。
2.3 輸出去模糊化
由式(2)可知磁懸浮列車所受電磁渦流阻力和空氣阻力大小與運(yùn)行速度相關(guān),速度越高,所受阻力越大,模型失配越嚴(yán)重。從跟蹤效果可以看出,列車低速運(yùn)行時(shí),PID控制和Fuzzy-PID控制都能較好適應(yīng)系統(tǒng)模型變化,且Fuzzy-PID控制的響應(yīng)更快、超調(diào)更小;列車高速運(yùn)行時(shí),傳統(tǒng)PID控制已經(jīng)無法適應(yīng)系統(tǒng)模型變化,超調(diào)量和調(diào)整時(shí)間遠(yuǎn)遠(yuǎn)大于Fuzzy-PID控制。可以看出Fuzzy-PID控制效果良好,能夠適應(yīng)磁浮運(yùn)控系統(tǒng)需求,改善系統(tǒng)動態(tài)性能。
4 結(jié)論
本文基于Fuzzy-PID控制的磁懸浮列車速度跟蹤控制系統(tǒng),可以實(shí)現(xiàn)不同速度等級下的高精度跟蹤控制。解決了在系統(tǒng)復(fù)雜非線性條件下,動態(tài)最優(yōu)控制由于模型不準(zhǔn)確而引起的速度跟蹤系統(tǒng)動態(tài)性能低的問題。本文的研究實(shí)用性強(qiáng),算法實(shí)現(xiàn)簡單,具有很高的潛在市場價(jià)值。
參考文獻(xiàn):
[1]Ono M, Koga S, Ohtsuki H. Japan's superconducting Maglev train[J]. IEEE Instrumentation & Measurement Magazine, 2002, 5(1):9-15.
[2]Sawada K. Outlook of the Superconducting Maglev[J]. Proceedings of the IEEE, 2009,97(11;11):1881-1885.
[3]吳玉生.磁浮列車自動駕駛(ATO)系統(tǒng)控制算法研究與仿真[D].國防科學(xué)技術(shù)大學(xué),2005.
[4]楊光.高速磁浮列車最優(yōu)速度曲線及其跟蹤控制研究[D].北京交通大學(xué),2007
[5]李達(dá).磁浮列車運(yùn)行速度曲線優(yōu)化設(shè)計(jì)和特殊路況下的緊急制動性能研究[D].浙江大學(xué),2005.
[6]曾欣欣.S1線中低速磁浮列車最大牽引力控制方式研究[J].鐵道學(xué)報(bào),2017,39(06):55-58.
[7]季輝,李志堅(jiān),陳小剛.基于Fuzzy-PID控制的雷達(dá)伺服系統(tǒng)研究[J].電子測量技術(shù),2017,40(12):29-32.
[8]琚垚,鄭偉.淺談隸屬函數(shù)對模糊控制系統(tǒng)控制性能的影響[J].科技創(chuàng)新與應(yīng)用,2013(04):53.