圓弧軌跡擬合的步進(jìn)電機(jī)模糊控制系統(tǒng)
2019-06-27 01:48:48許釗
科技創(chuàng)新與應(yīng)用 2019年8期
許釗
摘? 要:制作高閃耀角一致性的曲面閃耀光柵需要工作臺能夠進(jìn)行曲線擬合運動,而工作臺的運動控制是由步進(jìn)電機(jī)完成的,因此為了得到高精度的運動軌跡,需要對控制工作臺運功的步進(jìn)電機(jī)控制算法進(jìn)行研究。首先,介紹了曲面閃耀光柵離子束刻蝕機(jī)三維工作臺的原理方案和一種適用于工作臺的圓弧擬合算法,提出了一種適用于步進(jìn)電機(jī)的模糊控制算法。隨后,開展了三維工作臺運動軌跡擬合實驗,并對不同控制方法下的擬合軌跡進(jìn)行了對比。實驗結(jié)果表明:工作臺進(jìn)行15個周期的凸面曲線擬合運動的累積定位誤差小于0.15mm,角度誤差小于0.02°。進(jìn)一步提升了三維運動工作平臺的穩(wěn)定性和精度。
關(guān)鍵詞:步進(jìn)電機(jī);模糊控制;軌跡擬合
中圖分類號:TM383.6? ? ? ?文獻(xiàn)標(biāo)志碼:A? ? ? ? ?文章編號:2095-2945(2019)08-0073-02
Abstract: In order to make curved blazed gratings with high flash angle consistency, it is necessary for the worktable to be able to carry out curve fitting motion, and the motion control of the worktable is completed by the stepping motor. So in order to obtain the high precision motion track, it is necessary to study the stepping motor control algorithm which controls the operation power of the worktable. Firstly, the principle and scheme of 3D worktable of curved blazed grating ion beam etching machine and an arc fitting algorithm suitable for worktable are introduced. A fuzzy control algorithm for stepping motor is proposed. Then, the fitting experiment of three-dimensional worktable motion trajectory is carried out, and the fitting trajectory under different control methods is compared. The experimental results show that the cumulative positioning error is less than 0.15 mm and the angle error is less than 0.02°for 15 periods of convex curve fitting motion of the worktable. The stability and accuracy of the three-dimensional motion working platform are further improved.
Keywords: stepping motor; fuzzy control; trajectory fitting
1 刻蝕軌跡擬合理論模型
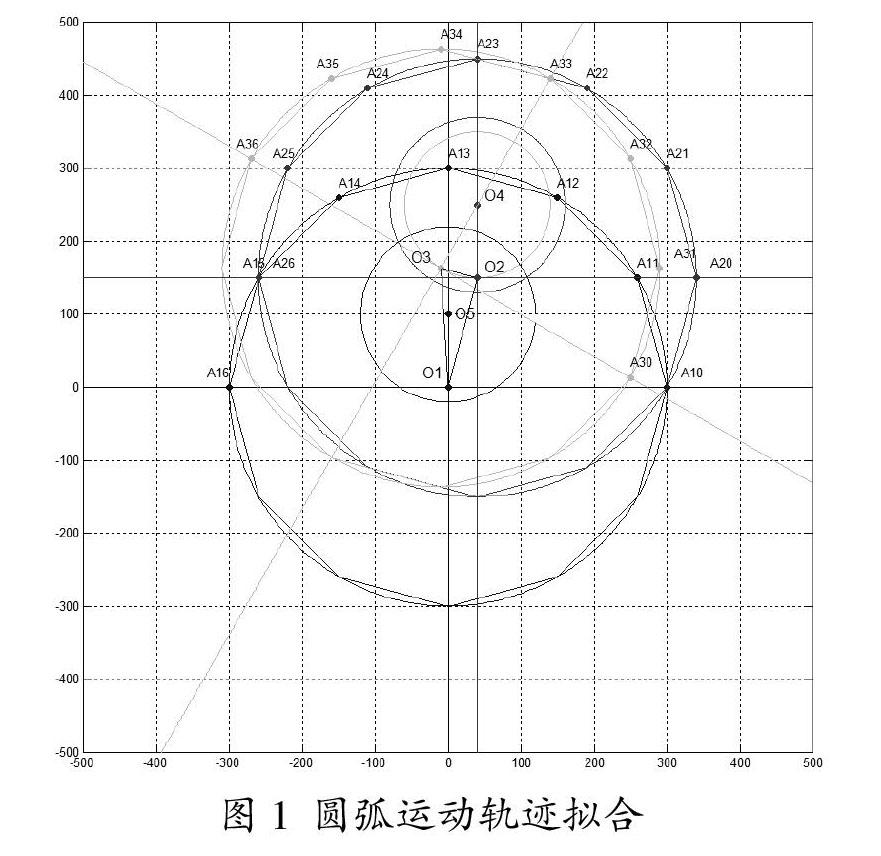
由于所需應(yīng)用的工作平臺無法實現(xiàn)直接的圓周運動,想要圓的正內(nèi)接x邊形無限接近于圓,只需擬合次數(shù)x足夠大即可。而且這個多邊形的每一條邊均為直線,并可以通過X-Y運動合成,角度誤差還可以通過θ軸調(diào)整,從而使工作平臺可以在誤差范圍內(nèi)實現(xiàn)滿足要求的類似于圓的運動軌跡。圖1是其運動軌跡擬合過程。
2 步進(jìn)電機(jī)模糊控制的實現(xiàn)
圖2為所應(yīng)用的步進(jìn)電機(jī)控制系統(tǒng)結(jié)構(gòu)圖,e為步進(jìn)電機(jī)速度偏差,u為步進(jìn)電機(jī)脈沖頻率控制量。積分控制器輸出為ui=kI∑iei,模糊控制器的總輸出為二維模糊控制器輸出控制量u與積分控制器輸出疊加,即uf=u+ui。以上所述系統(tǒng)不僅可完全將系統(tǒng)穩(wěn)態(tài)誤差消除,還可以消除自激振蕩。
模糊控制系統(tǒng)采用二維控制器,通過齊格勒-尼科爾斯法得出了PID控制所需的初始值。速度偏差e和偏差變化率ec作為輸入。預(yù)定的目標(biāo)速度v作為本系統(tǒng)的輸入,反饋輸入是通過光電傳感器測得的步進(jìn)電機(jī)實際轉(zhuǎn)速,之后代入公式得出轉(zhuǎn)速偏差e和偏差變化率ec,經(jīng)模糊化和量化后作為模糊控制器的輸入信號,根據(jù)模糊規(guī)則判定后發(fā)出相應(yīng)的模糊控制量,模糊控制量需再經(jīng)過解模糊這一關(guān)鍵步驟后再輸出步進(jìn)電機(jī)轉(zhuǎn)速v的精確增加量,與前一個系統(tǒng)周期的步進(jìn)電機(jī)轉(zhuǎn)速相加后輸出實時轉(zhuǎn)速。本控制系統(tǒng)運用兩輸入單輸出結(jié)構(gòu),所有輸出控制采用同樣的模糊控制規(guī)則表和系統(tǒng)參數(shù),實際輸出速度為v′(k)=v′(k-1)+u(k)。
模糊控制規(guī)則的選擇:
本控制系統(tǒng)采用的是模糊控制,其中有三個關(guān)鍵的模糊變量:偏差e、偏差變化率ec和輸出u。對于模糊控制系統(tǒng)來說,控制語言,即模糊變量越多,描述就會越精確,也會有更高得控制精度,控制效果也會越好。但是相對而言,太細(xì)的劃分會使控制規(guī)則變得復(fù)雜,計算量變大,控制系統(tǒng)的實現(xiàn)也會變得更加困難。因此在本控制系統(tǒng)中選取了數(shù)量適中的三個模糊變量。在本模糊控制系統(tǒng)中,Ee、Eec和U的模糊子集取相同的語言值,即{NB,NM,NS,ZO,PS,PM,PB},對應(yīng)的論域[-3,-2,-1,0,1,2,3]。
隸屬度函數(shù)在模糊控制系統(tǒng)中的作用就是將實際的輸入量(如本系統(tǒng)中的轉(zhuǎn)速v等)轉(zhuǎn)變?yōu)槟:俊k`屬度函數(shù)的特征也反映了其系統(tǒng)特性,比如,隸屬度函數(shù)的形狀越陡,其分辨率也就越高,控制靈敏度也就越高。相對的,形狀平緩的隸屬度函數(shù)的控制特性相對平穩(wěn),系統(tǒng)穩(wěn)定性相對較好。除以上之外,速度反饋量中的噪音也是實際系統(tǒng)設(shè)計中必須要考慮的問題。根據(jù)上述描述,三角形函數(shù)形狀的隸屬度函數(shù)形狀簡單,計算難度也不大,分辨率相對于復(fù)雜隸屬度函數(shù)相差不大,具有很好的性能,因此,在本系統(tǒng)中,Ee、Eec和U的隸屬函數(shù)都采用三角形函數(shù),如圖3所示。
在模糊控制系統(tǒng)中,模糊規(guī)則需根據(jù)情況隨時改變,以求達(dá)到比較好的控制效果。當(dāng)步進(jìn)電機(jī)轉(zhuǎn)速偏差比較大的時候,模糊控制規(guī)則應(yīng)該使系統(tǒng)的輸出盡量減小偏差。而當(dāng)速度這一特征穩(wěn)定后,模糊控制規(guī)則應(yīng)該保證系統(tǒng)的穩(wěn)定性,避免超調(diào)量。中位數(shù)法,最大隸屬度法是最常用的解模糊方法。
3 實驗結(jié)果及討論
為檢驗三維工作臺的定位精度、重復(fù)性及穩(wěn)定性,工作臺的運動軌跡通過光柵尺以及編碼器記錄,通過記錄刻蝕不同刻蝕角度和曲率半徑的凹面光柵和曲面光柵運動軌跡并導(dǎo)入Matlab中分析,并得到擬合軌跡以及誤差。
圖5為經(jīng)典的PID控制的步進(jìn)電機(jī)控制的工作平臺刻蝕角度10°,曲率半徑為100的凸面光柵軌跡。而圖6為模糊的PID控制的步進(jìn)電機(jī)控制的工作平臺刻蝕角度10°,曲率半徑為100的凸面光柵軌跡。
4 結(jié)束語
筆者提出了一種步進(jìn)電機(jī)的模糊控制算法,加快了響應(yīng)時間,減少了超調(diào)量,通過對步進(jìn)電機(jī)的精確控制,達(dá)到了對曲面閃耀光柵刻蝕中三維工作臺精確控制的效果,提升了三維工作臺曲線擬合運動的運動精度。記錄了在不同情況下的三維運動工作平臺的運動軌跡,并對實驗結(jié)果進(jìn)行對比,實驗結(jié)果表明,通過模糊控制的步進(jìn)電機(jī)控制的三維工作平臺減小了累積的定位偏差和每次的角度誤差,在刻蝕角度10°,曲率半徑為100的凸面光柵時累計的定位偏差小于0.15mm,每次的角度誤差小于0.02°。進(jìn)一步提升了運動精度的要求。
參考文獻(xiàn):
[1]潘強(qiáng),鞠玉濤.一種步進(jìn)電機(jī)模糊自整定PID閉環(huán)控制系統(tǒng)設(shè)計[J].機(jī)床與液壓,2013(13).
[2]劉虎,張仁杰,劉振,等.基于ARM和TMC262的步進(jìn)電機(jī)運動控制系統(tǒng)[J].儀表技術(shù)與傳感器,2015(10).
[3]茌宏理,竇金生.基于模糊PID的永磁同步電機(jī)矢量控制系統(tǒng)的仿真研究[J].電子設(shè)計工程,2017(05).
[4]翟雁,郭陽寬,祝連慶,等.步進(jìn)電機(jī)模糊PID閉環(huán)控制系統(tǒng)仿真研究[J].現(xiàn)代電子技術(shù),2015(11).
[5]徐煜明.步進(jìn)電機(jī)速度控制的研究與實現(xiàn)[J].工礦自動化,2007(02).