飛機除冰車臂架輔助防碰撞系統設計
2019-06-29 01:40:34鐘韜1都奎江1于勰2
專用汽車 2019年6期
鐘韜1 都奎江1 于勰2
1. 威海廣泰空港設備股份有限公司 山東威海 264200
2. 西安電子科技大學計算機科學與技術學院 陜西西安 710126
1 前言
飛機除冰車是寒冷地區機場及航空公司必備的飛機運行安全保障車輛之一。在進行除冰作業的過程中,除冰設備雖然會與飛機保持一定的作業距離,但是也會因操作不當或外界惡劣環境影響視線等原因導致除冰設備與飛機發生剮蹭事故。為了避免這類事故發生,技術人員采用了在高空作業艙安裝超聲波或者行程觸須開關用于檢測障礙物的方式,但是這種簡單的保護措施并不能有效地保證除冰設備與飛機之間的安全距離,而且外界環境對超聲波的檢測存在一定的影響,尤其是雨雪霜凍等惡劣天氣,會導致誤報警的現象出現。
為避免除冰設備與飛機發生剮蹭事故,針對機場提出的保護要求以及對操作者在作業過程中的操作位置調研,筆者設計了一套除冰車臂架輔助防碰撞控制系統,該系統從音頻視頻多角度配合,多傳感器檢測,為操作者提供了多方面輔助的防碰撞措施。
2 系統結構組成
飛機除冰車臂架輔助防碰撞系統由臂架姿態檢測系統、距離檢測系統、顯示系統、視頻監控系統、語音報警系統5個子系統組成,并通過中央處理器對各個子系統檢測到的數據進行算法計算并對執行機構的液壓比例閥進行控制,使臂架在動作過程中能與檢測到的障礙物始終保持安全距離。系統結構框圖如圖1所示。
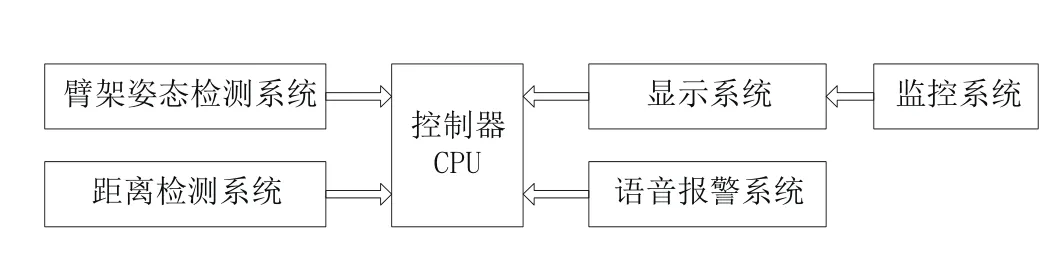
圖1 系統結構框圖
2.1 臂架姿態檢測系統
臂架姿態檢測系統主要是為了檢測除冰車在工作狀態臂架的舉升角度、轉臺旋轉角度、內臂的伸出長度、工作艙傾斜角度,從而檢測出臂架與車體之間的姿態數據,為距離檢測系統提供明確的障礙物檢測,區分檢測的距離是車體與臂架的距離還是障礙物與臂架的距離,從而根據檢測的距離數據進行臂架動作的限速和停止控制。臂架姿態檢測系統結構如圖2所示。
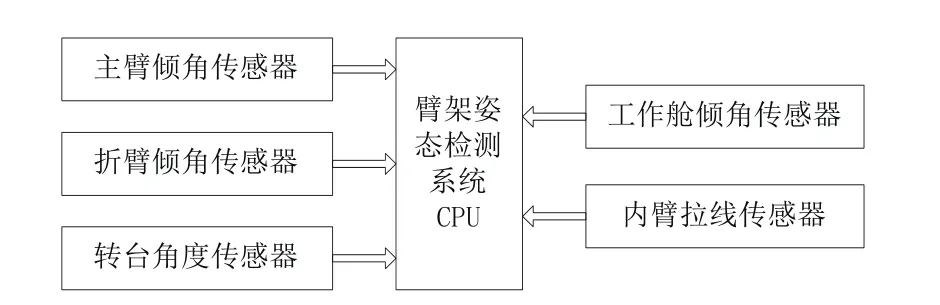
圖2 臂架姿態檢測系統結構框圖
2.2 距離檢測系統
距離檢測系統是除冰車臂架輔助防碰撞系統的重要數據采集系統,為了使用合適的傳感器進行距離參數的采集,反復進行了各種傳感器對比,根據多方比較確定采用毫米波雷達及超聲波傳感器作為檢測傳感器。多種距離傳感器對比如表1所示。
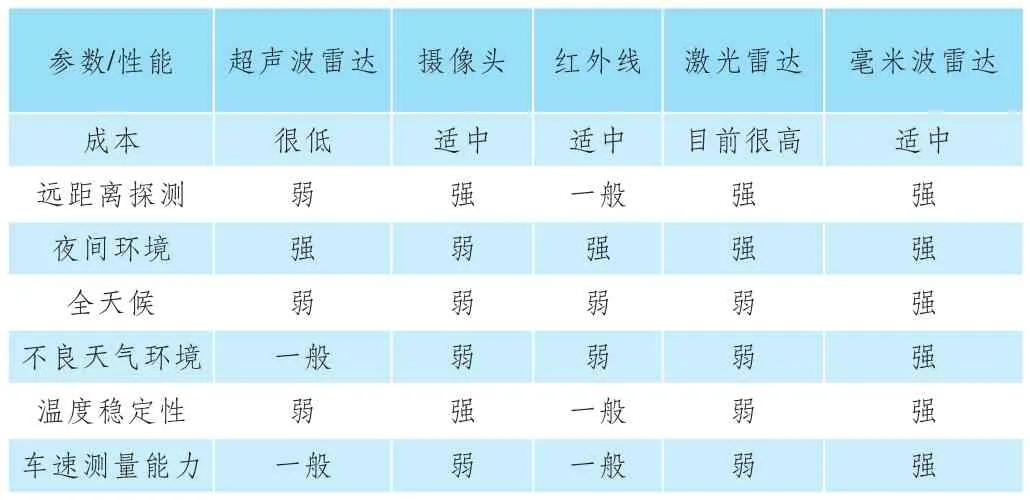
表1 多種距離傳感器對比表
毫米波雷達傳感器使用的是毫米波(在30~300 GHZ頻域,波長為1~10 mm)。其中24 GHZ雷達傳感器、77 GHZ雷達傳感器主要應用于汽車防碰撞,毫米波雷達穿透霧、煙以及灰塵的能力強,抗干擾能力強,具有全天候全天時的特點。
此外毫米波雷達可以根據需要對檢測的軸方向的檢測物進行屏蔽設定,這樣可以大大提高檢測的精準度,通過與程序算法的配合可以有效降低誤報警率。毫米波雷達檢測范圍及檢測范圍設定如圖3所示。
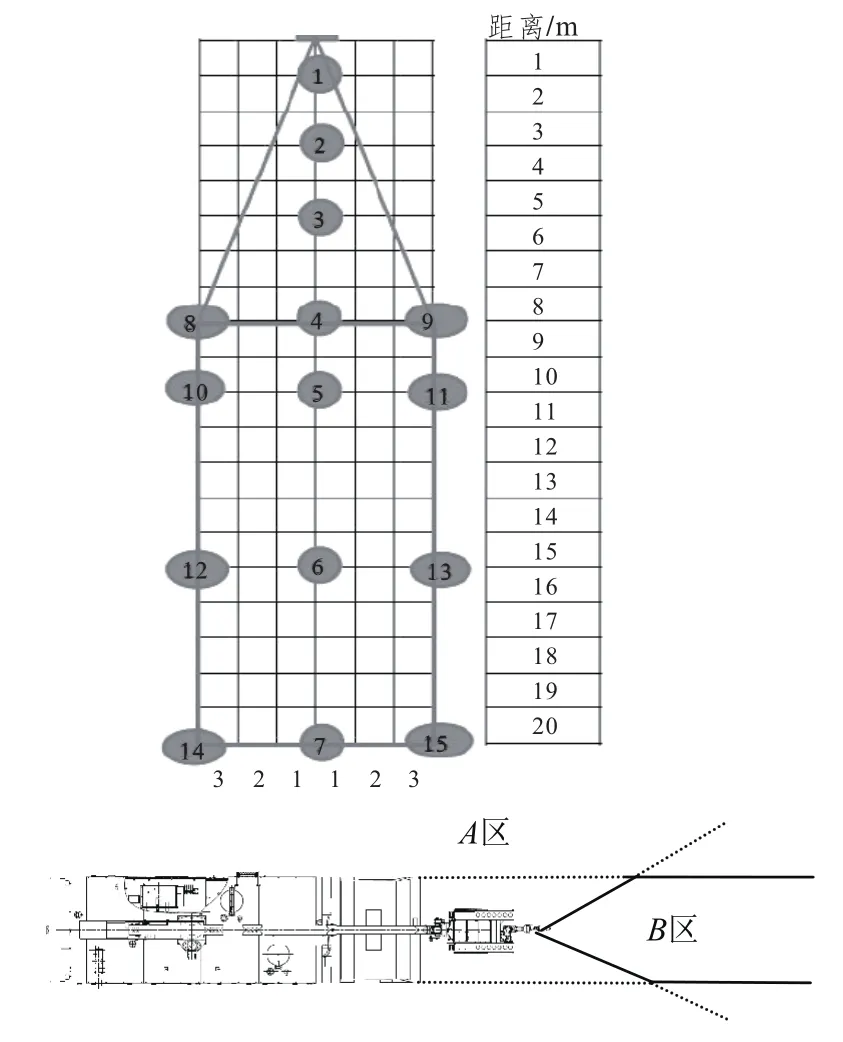
圖3 毫米波雷達檢測范圍及檢測范圍設定
通過圖3中傳感器的安裝位置及對毫米波雷達的軸向檢測范圍的設定可以將傳感器檢測到的A區障礙物忽略,只檢測B區的障礙物。
在安裝調試過程中,利用上位機檢測軟件可以在線監控雷達檢測物體的信息,設定有效區域的檢測范圍,忽略無效區域的檢測信號。上位機軟件監控界面如圖4所示。
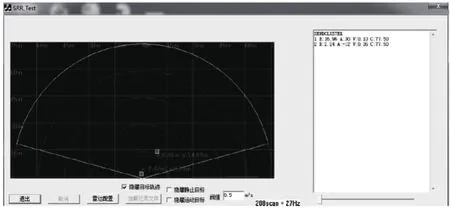
圖4 上位機軟件監控界面
2.3 顯示系統
顯示系統為飛機除冰車臂架輔助防碰撞系統提供了人機交互界面,通過該子系統可以使操作者在進行除冰作業過程中實時了解臂架的整個參數,包括臂架姿態參數值、距離檢測傳感器實時檢測的距離值以及詳細的報警信息,此外顯示系統還以Flash動畫的方式將整個除冰車的動作進行了演示,為操作者提供了一個直觀的姿態界面。顯示器Flash動畫界面如圖5所示。
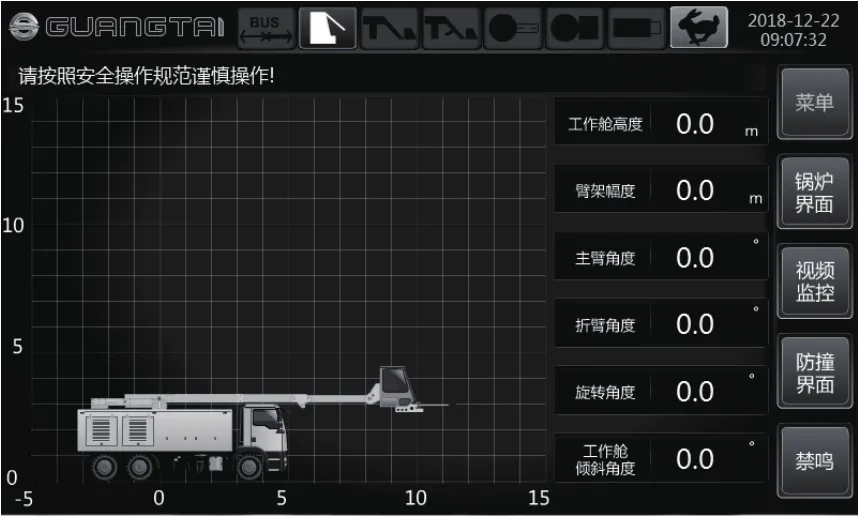
圖5 顯示器Flash動畫界面
2.4 視頻監控系統
視頻監控系統是除冰車臂架輔助防碰撞系統的一個重要子系統,由于除冰車工作性質特殊,其工作時環境相對惡劣并且在遇到大風天氣除冰液會附著在攝像頭上,為了保證該系統的相對穩定性,視頻監控系統僅以影像的形式通過獨立的顯示器為操作者提供盲區視頻信號,但并沒有將影像信號數字化傳遞給控制器參與主動控制。
該視頻監控系統采集了兩個位置的視頻影像,一路普通攝像頭安裝在臂架根部,沿臂架方向監控;另一路魚眼超廣角攝像頭安裝在工作艙底部,當臂架舉升后該攝像頭將會為工作艙的操作者提供一個前后180°、左右110°的上帝視角影像,讓操作者消除整個工作盲區,就像坐在一個透明的工作艙內一樣。
2.5 語音報警系統
為了給除冰車臂架操作者提供一個優化的操作流程,該輔助防碰撞系統提供了語音報警系統,可為操作者實時播報詳細的報警信息及解除報警的操作流程,當操作者在使用該系統遇到報警狀況時,能夠根據語音提示做出快速反應。
3 檢測機構分布設計
相對于其他機場設備,除冰車臂架動作不確定性突出,為了保證在工作狀態下除冰車臂架輔助防碰撞系統能夠起到有效的主動防碰撞作用以及減少不必要的誤報警狀況,需要合理地確定傳感器的安裝位置。
通過對各大機場的調研及以筆者考察到的相關數據做支持,對各機務操作者的操作規范進行了深究,最終以B737和B787常用機型作為模擬對像確定了測距傳感器的安裝位置。模擬除冰作業如圖6、7所示。
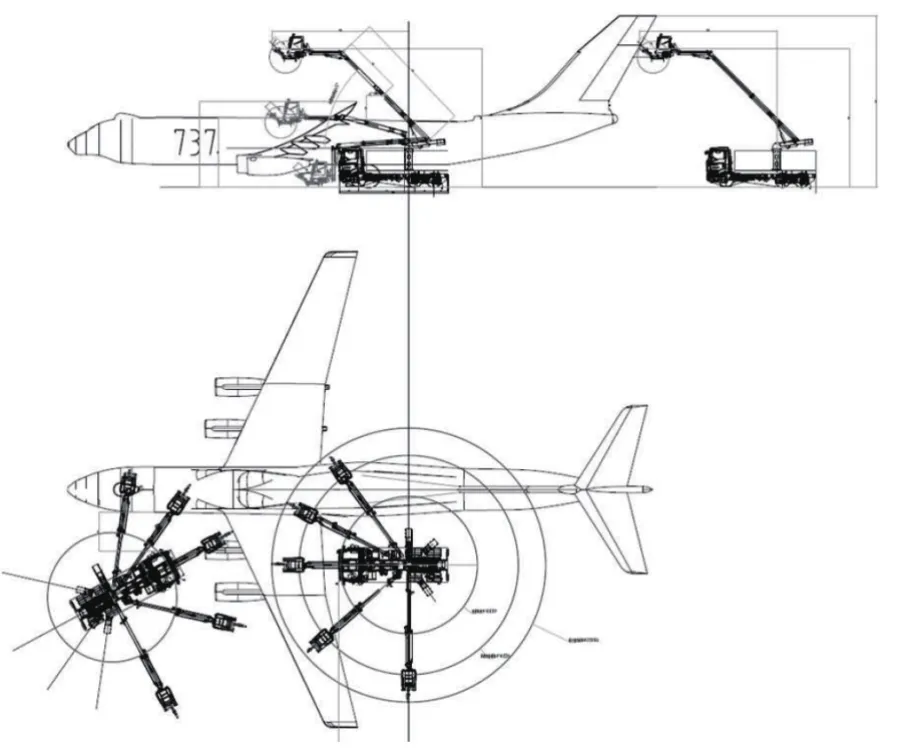
圖6 B737模擬除冰作業位置圖
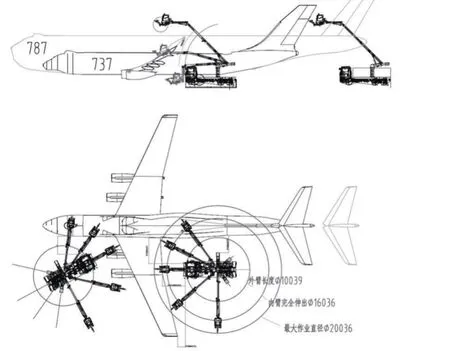
圖7 B787模擬除冰作業位置圖
經過模擬發現除冰作業時,除冰車臂架與飛機俯視重疊的部分只有工作艙及折臂,其他部分均不在碰撞范圍內,遂臂架只對折臂、工作艙下端以及水炮前端進行防碰撞保護。距離檢測傳感器位置分布如圖8所示。
4 系統控制算法解析
除冰車臂架輔助防碰撞系統分成3個距離檢測部位,分別為折臂下端、工作艙下端以及水炮前端。由于臂架與底盤之間存在相對移動,各個部位的測距傳感器需要判斷檢測到的距離數據是檢測到車體的距離還是障礙物的距離,為了能夠明確地鑒別真正的障礙物,就需要將臂架與車體的變化距離實時地進行測量和計算。臂架姿態檢測系統就是為了解決這個問題,通過傳感器的檢測可以將臂架與車體的實際距離數字化,通過傳感器在臂架安裝位置的測量,再利用三角函數公式,就可以將安裝位置與車體間隨臂架角度變化的距離值計算出來,再與傳感器檢測到的實時距離值進行比較,當檢測到的距離值小于計算的臂架傳感器與車體之間的距離值時,就能夠判斷出有障礙物出現,此時就需要根據邏輯控制對臂架的動作方向及速度進行主動控制。距離檢測傳感器安裝及檢測范圍如圖9所示。

圖8 距離檢測傳感器位置分布圖
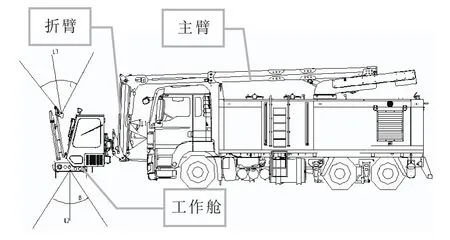
圖9 距離檢測傳感器安裝及檢測范圍
4.1 艙體下端障礙物檢測判斷
艙體下端障礙物檢測判斷公式:

式中,H為艙體距離地面高度;L1為主臂長度;α為主臂傾角;L2為折臂長度;β為折臂傾角;h為高度補償值。
工作艙底部距離檢測如圖10所示。依靠臂架安裝的姿態檢測傳感器可以依據公式計算出工作艙與地面之間的實際距離,工作艙底部距離檢測傳感器檢測到的實際距離L與計算的距離H進行比較就可以判斷出底部有無障礙物出現。
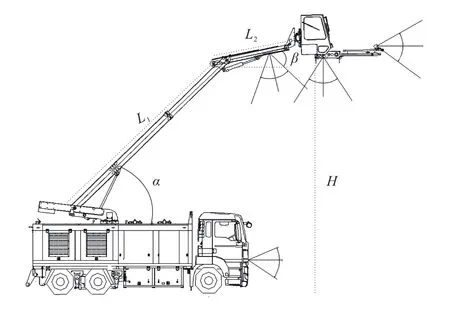
圖10 工作艙底部距離檢測
4.2 折臂下端傳感器檢測判斷
折臂下端傳感器檢測判斷公式:
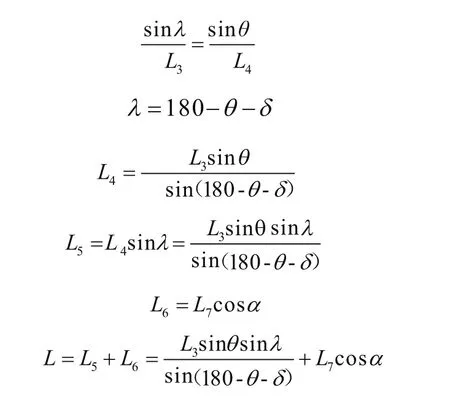
式中,λ為傳感器檢測極限角度與主臂垂線夾角;θ為折臂垂直夾角;δ為傳感器極限角度與折臂夾角;L3為傳感器在折臂安裝點與折臂和主臂鉸接點的距離;L4為傳感器檢測的極限最近距離;L5為傳感器檢測的水平距離;L6為內臂伸出的水平距離;L7為內臂伸出的實際距離;L為傳感器距離車體的理論計算距離。
折臂下端距離檢測如圖11所示。L值為傳感器與車體最近檢測位置的計算值,當傳感器檢測的實際值Lr 圖11 折臂下端距離檢測 按照炮頭前端的傳感器安裝位置,其檢測范圍只對軸向距離進行設定就可以滿足檢測距離的要求,其實際檢測的數據值按照限速及停止距離進行控制即可。 在系統設計中設定當傳感器檢測到有障礙物,并且在1 m≤障礙物與臂架之間的距離<3 m的位置時進行減速控制,在檢測到該距離小于1 m時進行動作鎖定,使臂架無法進行任何動作。為了保證臂架與障礙物之間的絕對安全,當臂架動作鎖定后只能通過手動按鈕強制解除,否則即使傳感器檢測到障礙物距離在安全位置,臂架也無法繼續動作。當然,當障礙物一直在小于1 m的位置時,即使使用手動按鈕解除臂架鎖定,系統也會立即再次鎖定。 該除冰車臂架輔助防碰撞系統在實際應用中得到了充分驗證,在整個調試過程中保護系統可以有效地保護臂架動作。在攝像頭的輔助監控下,操作者可以以俯視的視角觀察到整個臂架前端到末端的影像,為操作提供更多的便利。 但在特殊工況下也會存在誤報警狀況: a. 受惡劣天氣的影響如大暴雨及特大暴雨情況下,傳感器會感應到雨水,對傳感器檢測的準確度產生影響; b. 傳感器的檢測范圍限制的影響,會存在保護的盲區,針對這個問題用攝像頭作為盲區的輔助監控,但需要操作者主動操作判斷; c. 該系統定位為輔助系統,還不能到達完全自主防碰撞的目的; d. 傳感器在檢測斜面或者弧形面時會出現檢測距離與實際距離出現偏差的情況; e. 由于臂架動作的復雜狀況,整個臂架的保護只按照正常作業環境對靠近飛機近的部位進行保護,其他部位不在防護范圍,所以系統不能起到全臂架的防護。 對于上述出現的問題,后續會進行針對性地完善,提升防碰撞的等級。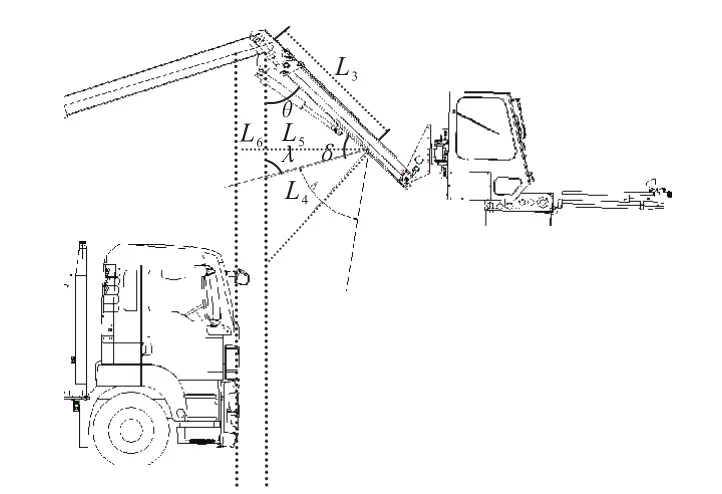
4.3 炮頭前端傳感器檢測判斷
5 結語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
