面向鐵路巡檢的無人機(jī)飛行路徑規(guī)劃方法
2019-07-03 01:11:36王泉東伍道樂羅意平魏曉斌
鐵路計(jì)算機(jī)應(yīng)用 2019年6期
王泉東,伍道樂,楊 岳,羅意平,魏曉斌
(1.中南大學(xué) 交通運(yùn)輸工程學(xué)院,長沙 410083;
2. 株洲電力機(jī)車有限公司 大功率交流傳動電力機(jī)車系統(tǒng)集成國家重點(diǎn)實(shí)驗(yàn)室,株洲 412000)
近年來,隨著我國鐵路交通的快速發(fā)展,鐵路運(yùn)營安全受到了前所未有的重視。目前,鐵路線路的巡檢主要由工作人員完成,但由于鐵路線路跨度大,有很大一部分的鐵路線路處于惡劣環(huán)境或不便工作人員巡檢的區(qū)域,人工檢查費(fèi)時費(fèi)力,效率較低[1]。無人機(jī)具有靈活機(jī)動,無視地形的特點(diǎn),使用無人機(jī)進(jìn)行鐵路線路巡檢,可以提高鐵路線路的檢測效率,并且其鐵路巡檢工作與鐵路系統(tǒng)的正常運(yùn)營互不干擾。
無人機(jī)的路徑規(guī)劃是實(shí)現(xiàn)無人機(jī)沿鐵路自動巡航的前提。需要對巡檢路徑進(jìn)行規(guī)劃,才能保證無人機(jī)的飛行安全,并使無人機(jī)嚴(yán)格沿著鐵路線路飛行。針對無人機(jī)的路徑規(guī)劃,國內(nèi)外學(xué)者進(jìn)行了很多嘗試。Pall[2]提出了一個基于消失點(diǎn)的無人機(jī)軌道跟蹤方法,使用邊緣檢測法提取無人機(jī)前置攝像頭獲取圖像中兩條軌道代表的直線的交叉點(diǎn),計(jì)算鐵路線路的消失點(diǎn),并將消失點(diǎn)用于調(diào)整無人機(jī)的飛行方向,該方法仿真效果良好,但未經(jīng)過實(shí)際驗(yàn)證。鄧榮軍[3]基于遺傳算法規(guī)劃輸電線路的無人機(jī)巡檢路徑,采用極坐標(biāo)編碼方式構(gòu)造無人機(jī)巡檢路徑模型,并設(shè)計(jì)了適合無人機(jī)巡檢路徑規(guī)劃的遺傳算子,仿真結(jié)果表明,該方法具有良好的可靠性。王夢茹[4]設(shè)計(jì)了順序航帶法和間隔航帶法兩種用于低空攝影測量的無人機(jī)航跡規(guī)劃方法,并使用無人機(jī)進(jìn)行了飛行驗(yàn)證,實(shí)驗(yàn)結(jié)果表明,順序航帶法的普適性較強(qiáng),間隔航帶法采集的數(shù)據(jù)質(zhì)量更高。魏瀟龍[5]提出了一個基于改進(jìn)蟻群算法的無人機(jī)飛行路徑規(guī)劃方法,在利用卡爾曼濾波對ADS-B信息進(jìn)行修正的基礎(chǔ)上,設(shè)計(jì)了無人機(jī)沖突感知的技術(shù)方案,該方案可避免無人機(jī)與有人機(jī)之間的飛行沖突。王銳[6]針對輸電線路無人機(jī)巡檢的安全問題,設(shè)計(jì)了無人機(jī)巡檢地面測控站及運(yùn)輸保障系統(tǒng),對設(shè)備選型、 空間設(shè)計(jì)、電磁兼容、 安全性等方面進(jìn)行了綜合考慮, 以滿足輸電線路無人機(jī)巡檢的特殊要求。
以上的無人機(jī)路徑規(guī)劃方法不適用于真實(shí)場景下的鐵路線路巡檢,為滿足地質(zhì)災(zāi)害發(fā)生處、橋梁、懸崖等特殊環(huán)境下的鐵路線路巡檢的特殊需求。本文搭建了一個基于無人機(jī)的鐵路巡檢平臺,使用基于三次樣條插值法的無人機(jī)路徑規(guī)劃方法指導(dǎo)無人機(jī)的飛行路徑。
1 鐵路巡檢平臺搭建
為了獲取鐵路沿線的實(shí)況視頻數(shù)據(jù),提高鐵路巡檢效率,搭建了鐵路巡檢平臺。鐵路巡檢平臺由無人機(jī)、實(shí)時動態(tài)(RTK,Real Time Kinematic)測量儀、云臺、相機(jī)組成,其構(gòu)架如圖1所示。
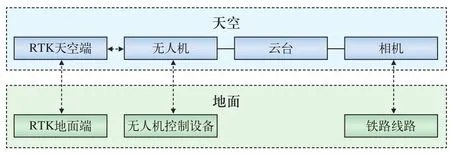
圖 1 鐵路巡檢平臺構(gòu)架
其中,無人機(jī)是其他設(shè)備的飛行載體,搭載其他設(shè)備沿著鐵路線路飛行。無人機(jī)的飛行與工作通過專用的控制設(shè)備控制。為了保證無人機(jī)飛行路徑與鐵路線路的貼合度,需預(yù)先對無人機(jī)的飛行路徑進(jìn)行規(guī)劃,并將規(guī)劃好的無人機(jī)飛行路徑導(dǎo)入無人機(jī)控制設(shè)備,用于指導(dǎo)無人機(jī)沿鐵路線路的自動巡航。
RTK是鐵路巡檢平臺的高精度定位部件,分為天空端和地面端兩個部分。RTK地面端固定在地面作為參考點(diǎn),通過連續(xù)接收衛(wèi)星信號解算其所在位置的高精度衛(wèi)星坐標(biāo),并將位置信息傳送給RTK天空端;RTK天空端安裝在無人機(jī)上,結(jié)合GPS信息和RTK地面端提供的位置信息計(jì)算無人機(jī)的厘米級三維定位坐標(biāo)。
云臺是無人機(jī)與相機(jī)的連接部件,將相機(jī)固定在無人機(jī)上,在維持相機(jī)穩(wěn)定的同時增大相機(jī)拍攝范圍。相機(jī)是采集鐵路沿線視頻數(shù)據(jù)的部件,以俯視視角拍攝鐵路實(shí)況,為鐵路線路的故障診斷提供參考數(shù)據(jù)。為了滿足鐵路巡檢的需求,最終搭建的鐵路巡檢平臺各部分的參數(shù)如表1所示。

表1 鐵路巡檢平臺部件與參數(shù)
2 無人機(jī)飛行路徑模型
2.1 無人機(jī)飛行路徑模型構(gòu)成
無人機(jī)在飛行過程中,以RTK獲得實(shí)時大地坐標(biāo)(Bi,Li,Hi)(Bi為緯度,Li為經(jīng)度,Hi為海拔)為參考,計(jì)算實(shí)際位置與預(yù)設(shè)飛行路徑之間的差值,并調(diào)整飛行偏差。為了使無人機(jī)沿鐵路線路飛行,建立了無人機(jī)飛行路徑模型,用于規(guī)劃無人機(jī)飛行路徑。
建立的無人機(jī)飛行路徑模型由飛行路徑海拔函數(shù)、飛行路徑經(jīng)度與緯度函數(shù)組成。飛行路徑海拔函數(shù)通過鐵路線路坡度與現(xiàn)場障礙物高度確定,飛行路徑經(jīng)度與緯度函數(shù)通過三次樣條插值法(Cubic Spline Interpolation)求取。
三次樣條插值法是通過解三彎矩方程組,求取通過一系列形值點(diǎn)的一條光滑曲線的方法。求解出的三次樣條曲線處處光滑,且在每一個小區(qū)間內(nèi)次數(shù)都≤3。考慮到鐵路線路的拐彎半徑在300 m以上[7],且拐彎處曲率變化平緩,平順性較好,故三次樣條曲線能較好地表征鐵路線路的經(jīng)度和緯度之間的函數(shù)關(guān)系。本文使用RTK獲取實(shí)驗(yàn)鐵路線路上的坐標(biāo)點(diǎn)作為三次樣條曲線的形值點(diǎn),以此為基礎(chǔ)求解無人機(jī)飛行路徑的經(jīng)緯度三次樣條曲線。
2.2 無人機(jī)飛行海拔
考慮到鐵路線路的運(yùn)輸能力和牽引質(zhì)量,鐵路的坡度在3‰以下[8],故可將鐵路線路所在的面視為水平面。因此在建立無人機(jī)飛行路徑模型時,只需要預(yù)先考察好鐵路現(xiàn)場障礙物高度,就能根據(jù)RTK地面端測得的地面海拔信息與現(xiàn)場障礙物高度信息確定無人機(jī)飛行的海拔。設(shè)地面海拔高度為H0,障礙物高度為ΔH,則無人機(jī)飛行路徑的海拔如公式(1)。
Hi=H0+ΔH(1)
2.3 無人機(jī)飛行路徑經(jīng)度與緯度關(guān)系
為了確定無人機(jī)的飛行路徑的經(jīng)度與緯度函數(shù)關(guān)系,需要獲取巡檢路段的起點(diǎn)、終點(diǎn)與間隔采樣點(diǎn)的坐標(biāo)值。設(shè)采集到的巡檢路段坐標(biāo)點(diǎn)如表2所示,無人機(jī)飛行路徑經(jīng)度與緯度之間的三次樣條函數(shù)為S(L)。則在采樣點(diǎn)Li處,S(L)的解滿足式(2),且二階導(dǎo)數(shù)如式(3)。函數(shù)f(L)表示采集的樣本點(diǎn)經(jīng)度與緯度的映射關(guān)系。

表2 巡檢路段坐標(biāo)點(diǎn)

由于三次樣條函數(shù)S(L)被n個樣本點(diǎn)分割為n-1段,則在子區(qū)間[Li-1,Li]內(nèi),三次樣條函數(shù)可記為Si(L)。由于S(L)是不高于三次的多項(xiàng)式,其二階導(dǎo)數(shù)為線性函數(shù)或常數(shù),則在子區(qū)間[Li-1,Li]內(nèi),對于任意L,滿足式(4)。

其中,hi=Li-Li-1。
將式(4)連續(xù)積分兩次,并且利用插值條件Si(Li-1)=Bi-1,Si(Li)=Bi求取積分常數(shù),整理后得式(5)。
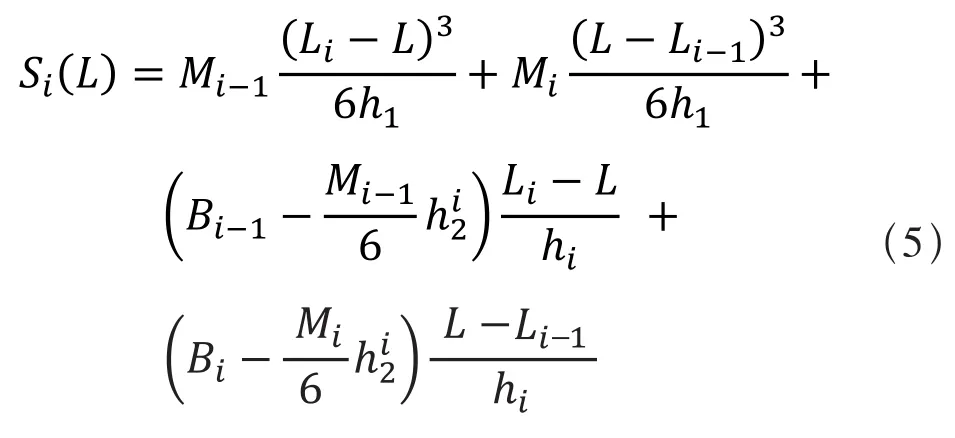
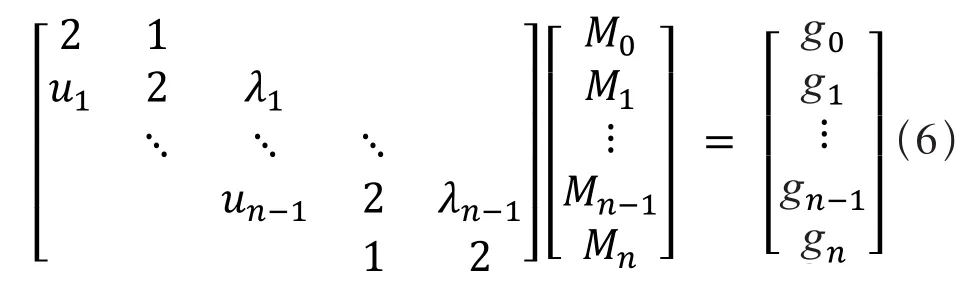
從式(5)中可以看出,只要求解出Mi的值,即可確定三次樣條插值函數(shù)Si(L),由連續(xù)條件與邊界條件可知,Mi可通過線性方程組(6)求解。
式(9)中,由曲線光滑邊界條件可得g0與gn的求解方法為式(10):
3 實(shí)驗(yàn)
3.1 實(shí)驗(yàn)準(zhǔn)備
本文選取的實(shí)驗(yàn)場地為廣州貨運(yùn)段凝霞基地某車輛較少的路段,實(shí)驗(yàn)環(huán)境如表3。實(shí)驗(yàn)線路長度為1 km;軌道為軌距為1 435 mm;現(xiàn)場最高的障礙物高8 m(接觸網(wǎng)中心柱);線路上布置了巖石、紙箱、行人、泡沫塑料等物體,用于模擬鐵路線路的異常情況。
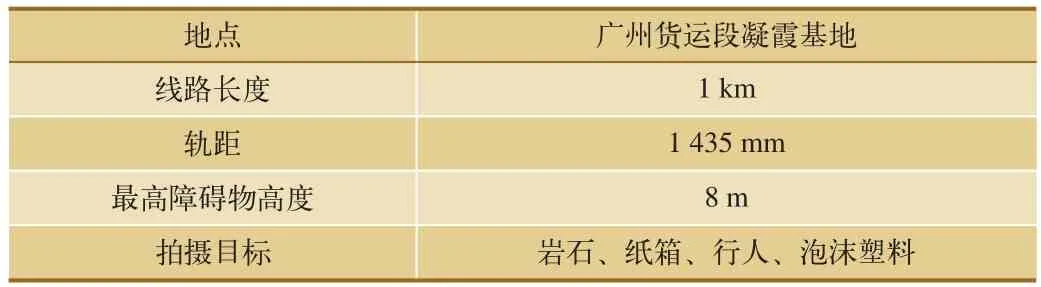
表3 實(shí)驗(yàn)環(huán)境
在MATLAB中建立了基于三次樣條插值法的無人機(jī)飛行路徑模型,并使用模型生成無人機(jī)飛行路徑。同時,選用DJI GSPRO無人機(jī)控制軟件來讀取生成的無人機(jī)飛行路徑,并對無人機(jī)進(jìn)行控制。
3.2 實(shí)驗(yàn)過程
為了獲取規(guī)劃無人機(jī)飛行路徑的原始數(shù)據(jù),首先手動操控本文搭建的基于無人機(jī)的鐵路線路巡檢平臺沿鐵路線路巡航,并基于RTK的厘米級定位記錄了鐵路線路的5個坐標(biāo)點(diǎn),如表4示所,為了保證飛行路徑的精度,將坐標(biāo)點(diǎn)取至小數(shù)點(diǎn)后9位。
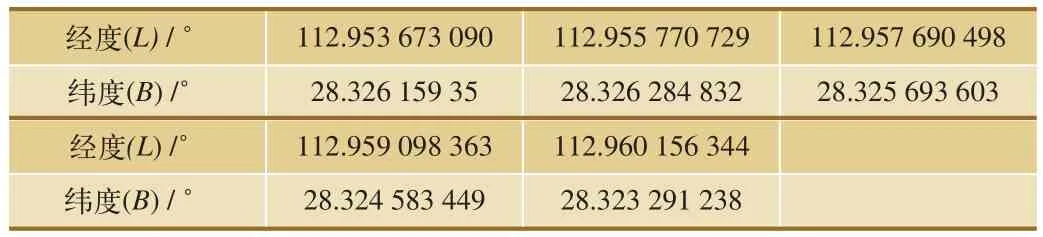
表4 實(shí)驗(yàn)線路坐標(biāo)點(diǎn)樣本集
將這5個點(diǎn)制作成KML文件導(dǎo)入無人機(jī)控制軟件DJI GSPRO,生成的無人機(jī)飛行路徑如圖2a。此時無人機(jī)飛行路徑由折線組成,與鐵路線路的貼合度較差。在MATLAB中使用提出的無人機(jī)飛行路徑模型對5個點(diǎn)坐標(biāo)進(jìn)行處理,生成的無人機(jī)飛行路徑的三次樣條曲線如圖2b。由圖可見,生成的飛行路徑較為光滑,且曲線輪廓與鐵路線路貼合度較高。
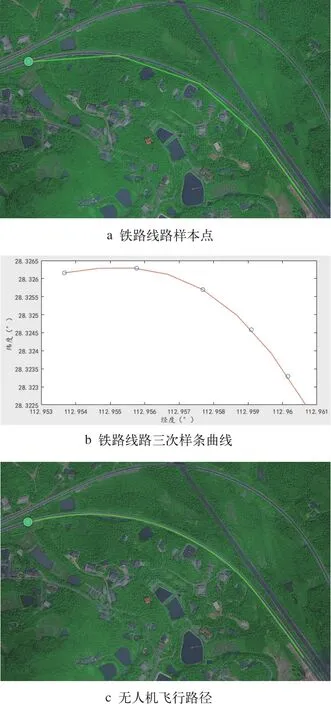
圖2 無人機(jī)飛行路徑規(guī)劃
對圖2b中的曲線進(jìn)行密集間隔取樣,獲得一系列鐵路線路坐標(biāo)點(diǎn),如表5,將所得的坐標(biāo)點(diǎn)制作成KML文件后導(dǎo)入無人機(jī)控制軟件,生成無人機(jī)飛行路徑如圖2c。比較圖2a與圖2c可知,鐵路線路的坐標(biāo)點(diǎn)經(jīng)過無人機(jī)飛行路徑模型處理后,生成的無人機(jī)飛行路徑與鐵路線路貼合效果很好。
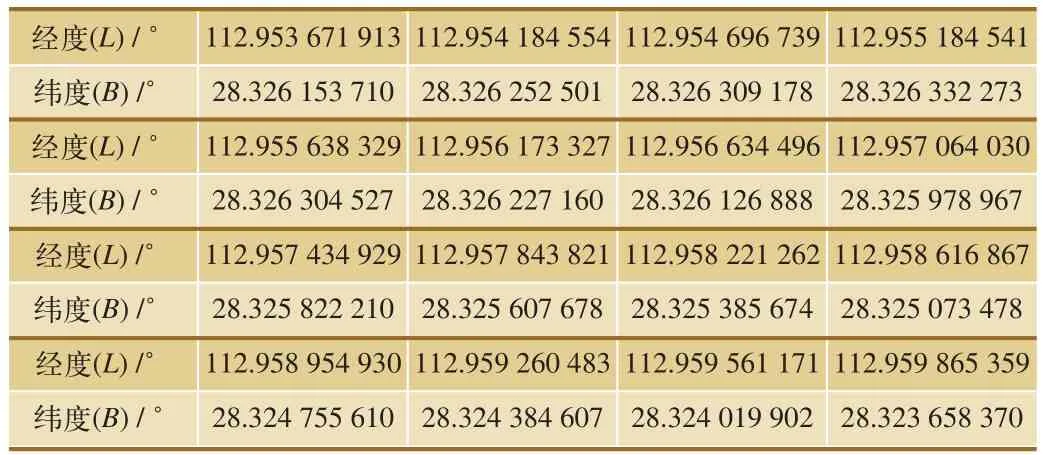
表5 實(shí)驗(yàn)線路間隔取樣集
3.3 實(shí)驗(yàn)結(jié)果
按照無人機(jī)飛行路徑模型,將無人機(jī)飛行的海拔高度設(shè)置為64 m,使用搭建的鐵路線路巡檢平臺對生成的無人機(jī)飛行路徑進(jìn)行了測試,鐵路線路巡檢平臺在鐵路上方的左右偏差為±3 m。平臺采集到的視頻數(shù)據(jù)的畫面能囊括鐵路范圍,且清晰度良好,如圖3。證明了本文提出的無人機(jī)飛行路徑規(guī)劃方法的有效性。

圖3 鐵路巡檢效果
4 結(jié)束語
為了提高鐵路線路巡檢效率,滿足地質(zhì)災(zāi)害發(fā)生處、橋梁、懸崖等特殊環(huán)境下的鐵路線路巡檢的特殊需求,本文搭建了基于無人機(jī)的鐵路線路巡檢平臺,并基于三次樣條插值法建立了無人機(jī)飛行路徑數(shù)學(xué)模型,在MATLAB中對提出的數(shù)學(xué)模型進(jìn)行了驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,所提出的方法能較好地指導(dǎo)無人機(jī)沿鐵路線路的自動巡航,可以滿足特殊條件下鐵路巡檢的需求并保證巡航安全,具有較高的實(shí)用價值。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
云南畫報(bào)(2021年12期)2021-03-08 00:50:54
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
鐵道通信信號(2018年7期)2018-08-29 01:17:04
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
通信電源技術(shù)(2016年4期)2016-04-04 02:58:04