CAN通信終端電阻匹配試驗研究*
2019-07-08 01:54:40
艦船電子工程 2019年6期
關鍵詞:信號
(海軍工程大學 武漢 430032)
1 引言
CAN(Controller Area Network)總線通信是一種具有高可靠性、實時性強、傳輸距離遠的雙線串行通信網絡,檢錯能力強,在汽車中控系統、船舶控制系統等領域廣泛使用。
CAN通信拓撲結構主要有總線型與星型結構等,實際工程中,根據環境不同要靈活采用總線型或者星型等布線方式,拓撲結構不同,其終端電阻的配置也不相同,并且終端電阻是否合理配置直接影響信號傳輸質量。
本文為研究不同拓撲結構下,不同終端電阻配置對CAN差分信號的影響,搭建CAN通訊試驗平臺,采用STM32105VCT6芯片,其內部帶有CAN控制器,使用TJA1040作為總線驅動器,其主要性能如下:1)TJA1040是PCA82C250/251高速CAN驅動器的后繼產品,完全兼容ISO/DIS11898標準;2)最高速率可達1Mbps;3)具有優秀的EMC性能;4)理想的無源性能;5)溫度保護;6)低功耗管理模式;7)支持遠程喚醒功能;8)總線及電源及地之間的短路保護[1]。
2 CAN信號位數值表示與邏輯識別范圍
CAN能夠使用多種物理介質,例如雙絞線、同軸電纜、光纖等。最常用的是雙絞線,信號使用差分電壓傳送,如圖1所示,兩條信號線被稱為CAN_H與CAN_L,靜態時兩線之間的差分電平Vdiff約為0,此時狀態表示為邏輯1,稱為隱性;用CAN_H比CAN_L高表示邏輯0,稱為顯性[2],CAN協議規定,顯性與隱性差分電平的識別要在一定閾值范圍內,如表1所示。

圖1 雙絞線CAN總線的電平表示

表1 差分電平邏輯識別范圍
3 總線型拓撲結構終端電阻配置研究
3.1 終端電阻為120Ω時差分信號質量研究
由于雙絞線特征阻抗約為120Ω,為了避免信號反射影響,CAN協議約定在總線終端上跨接一個120Ω的終端電阻保持阻抗連續,但在長距離通信情況下,由于線纜直流電阻阻值較大,如果繼續保持120Ω大小的終端電阻,雖然能避免信號反射帶來的影響,但實際上接收節點的收發器接收到的顯性差分電壓幅值較低,可能不在差分電平邏輯識別范圍內,導致節點接收失敗。

圖2 總線型拓撲結構通信試驗平臺
圖2為總線型拓撲結構通信試驗平臺,兩個節點處于總線首尾兩端,均跨接一個終端電阻,傳輸線纜為超五類非屏蔽雙絞線,線規AWG24,線纜直流電阻為133 mΩ/m,將終端電阻值固定為120Ω,改變傳輸距離,差分信號幅值變化如表2所示。

表2 終端電阻為120Ω時接收節點顯性差分信號幅值
由表2數據可知:終端電阻固定為120Ω時,不同距離下接收節點的顯性差分信號幅值不同,距離越長,線纜直流電阻越大,接收節點接收到的差分信號幅值越小,當傳輸距離至900m時,接收節點的收發器接收到的顯性差分電壓幅值為1V,此時差分電壓幅值的抗干擾能力極差,通訊呈現為時好時壞的現象,通訊失敗,其波形如圖3所示,故在遠距離通信中,為了保證信號穩定可靠,不應將終端電阻限制在120Ω。


圖3 雙節點900 m通信收發波形圖(終端電阻120Ω)
3.2 總線型拓撲結構等效電路分析
上一節得出結論:CAN通信總線型結構,其終端電阻配置不應固定在120Ω,通過等效電路來分析終端電阻及線纜電阻對差分信號幅值的影響。圖4是總線型網絡物理層等效電路圖,Vdiff.out是差動輸出電壓,在發送數據幀時節點可視為一個電壓源,幅值為Vdiff.out,標準值為2V。節點接收總線上的消息時,接收節點視為一個差動輸入電阻Rdiff,TJA1040的差動輸入電阻約為30kΩ,Vdiff.in為接收節點的差動輸入電壓,RT為終端電阻,RW為線纜電阻。

圖4 雙節點總線型結構物理層等效電路圖
在靜態條件下,接收節點的差動輸入電壓等于差動輸入電阻與通過該節點的電流的乘積。接收節點的差動輸入電壓取決于以下幾個因素:發送節點的差動輸出電壓Vdiff.out,總線線纜的電阻Rw以及接收節點的差動輸入電阻Rdiff和兩個終端電阻的阻值,接收節點的差動輸入電壓可由下式計算[4]:
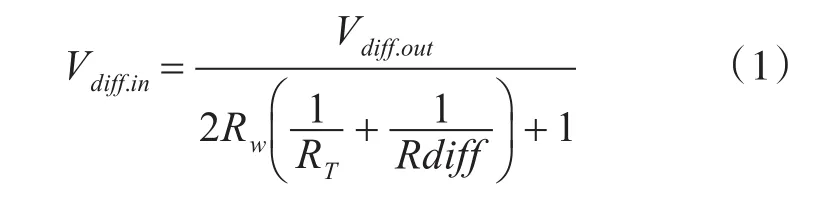
由式(1)看出,接收節點的差動輸入電壓與總線線纜電阻成反比,與終端電阻阻值成正比,為了接收節點正確檢測到顯性位,接收節點的差動輸入電壓必須大于閾值電壓Vth,即

Rw=ρL,ρ為電阻率,L為線纜長度,總線距離越長,線纜直流電阻越大,要使接收節點正確檢測到顯性位,終端電阻應更大。

3.3 終端電阻調整后差分信號質量研究
在上節理論推導基礎上,調整終端電阻阻值,不同傳輸距離下差分信號幅值變化見表3。從表中數據看出:傳輸距離900m時,調整終端電阻后,接收節點接收到的顯性差分信號幅值為1.7V。此時信號傳輸穩定,通訊正常,收發波形見圖5,與終端電阻120Ω時的信號波形相比,差分信號電壓幅值提高,雖然會因為終端電阻較大引起放電時間變長,在波形上表現為下降沿變緩,但由于采樣點處于每個位時間的80%左右,不影響接收節點正確接收。

表3 終端電阻調整后接收節點顯性差分信號幅值
4 星型拓撲結構終端電阻配置研究
總線型拓撲結構在CAN通信布線時最為常見[5],只在總線兩端配置終端電阻,為了避免分支節點處支線過長引起的信號反射導致信號失真,CAN協議要求支線長度不超過6m,在一些復雜領域中,如果繼續使用總線型拓撲結構,由于系統本身的復雜性,會帶來布線困難問題,采用星型拓撲結構一方面可減少布線困難問題,另一方面還可對中心節點進行設計實現對網絡智能化管理,因此需要研究星型拓撲結構及其終端電阻配置方案[6~7]。

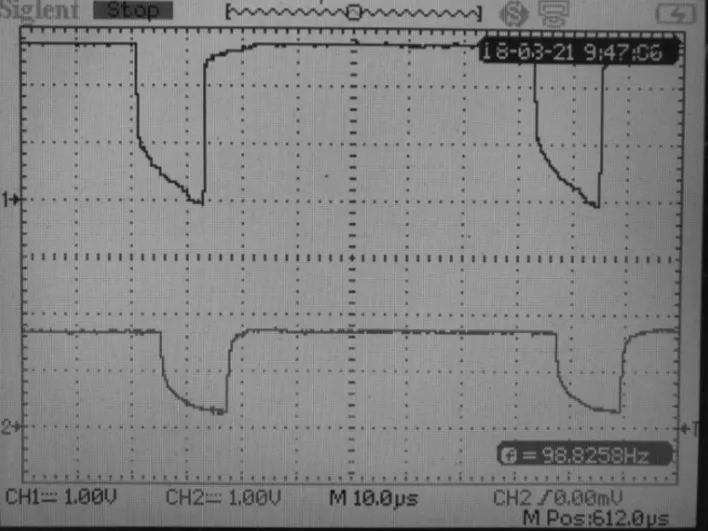
圖5 終端電阻調整后雙節點900m通信收發波形圖

圖6 星型拓撲結構試驗平臺
星型拓撲結構,在分支基本等長的情況下,可以不適用集線器等設備,調節節點的終端電阻阻值便可實現系統通信[8]。終端電阻對信號傳輸的影響在于匹配線纜的特征阻抗避免信號反射以及影響差分信號幅值。試驗拓撲結構如6所示,傳輸線纜為超五類非屏蔽雙絞線,線規AWG24,線纜直流電阻為133mΩ/m,中心節點與各分支節點相距300m,節點1發送,節點2、3、4接收,試驗結果如表4及圖7~10所示。

表4 星型拓撲結構終端電阻試驗結果


圖7 星型拓撲1、4節點收發波形(終端電阻120Ω)


圖8 星型拓撲1、4節點收發波形(終端電阻180Ω)
從表中數據可以看出,當終端電阻過小時,導致接收節點的差分電壓幅值較低未達到閾值識別范圍導致系統通信失敗。當終端電阻過大,如圖10所示,終端電阻與線纜特征阻抗不匹配引發信號反射,并且在下降沿,由于終端電阻過大導致傳輸線纜分布電容放電時間延長,影響采樣的正確性。因此星型拓撲結構終端電阻的匹配要考慮信號反射與差分信號幅值這兩個因素,從圖中可以看出,3個分支節點試驗時,分支節點終端電阻為180Ω時,信號反射不嚴重,幅值達到閾值識別范圍,試驗效果最好。本文未進行4節點以上的星型拓撲結構通信試驗,在更多節點的星型拓撲結構通信系統中,其終端電阻配置思路可參考本試驗。


圖9 星型拓撲1、4節點收發波形(終端電阻240Ω)


圖10 星型拓撲1、4節點收發波形(終端電阻440Ω)
5 結語
本文通過電路等效的方法推導出總線型網絡拓撲結構終端電阻與線纜直流電阻的關系,得出總線型拓撲結構終端電阻配置方案為RT=max{120Ω,2Rw},并進行了試驗驗證,證明推論的合理性。搭建3分支節點星型拓撲通信試驗平臺,并調節終端電阻觀察信號波形,發現在每個分支節點均跨接適當終端電阻能得到較好的通信效果。總之,根據實際情況可按不同拓撲結構進行布線及終端電阻匹配,有利于提高CAN的通信效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
