機載相控陣雷達仿真系統研究與實現
2019-07-08 06:46:17謝衛
計算機時代 2019年6期

摘? 要: 通過對機載相控陣雷達原理、工作流程的研究,對其功能進行分解和融合,轉化為目標檢測、多目標濾波跟蹤和任務資源調度管理等多個數學模型;著重分析研究了機載相控陣雷達的核心模塊,其相關功能、原理和實現流程,以及仿真系統的體系結構,提出了機載雷達仿真軟件系統的實現方法。對提出的方法進行仿真試驗,充分驗證了模型和方法的可行性和有效性。該仿真軟件已成功應用到工程試驗項目。
關鍵詞: 機載雷達; 相控陣; 仿真建模; 數據融合; 目標跟蹤
中圖分類號:TN955? ? ? ? ? 文獻標志碼:A? ? ?文章編號:1006-8228(2019)06-26-05
Abstract: By analyzing airborne phased array radar's function and its decomposition and synchronization, the mathematic models such as target indication by radar, multi-target tracking and resource management are built. Focus on the function, the theory and the realization process of the core model, a realization method of the simulation software system for airborne phased array radar is presented. The result of the simulation has validated the model and the method, the simulation software system has been successfully applied to the test project.
Key words: airborne radar; phased array; simulation modeling; data fusion; target tracking
0 引言
由于現代空戰上各種復雜環境的影響,要求利用多種傳感器組網來采集目標信息并加以融合,充分利用不同目標不同頻段、各個方向的反射特性,最大限度地提取信息,滿足空戰需要[1,2]。對于數據融合來說真實的戰場目標和傳感器探測數據,是檢驗其有效性的最好條件。然而這樣的真實數據很少,而且成本也較高,在融合算法的前期研究和實驗階段,就需要我們真實的模擬不同干擾環境下傳感器的探測數據。
雷達分系統是飛機綜合火控系統的重要傳感器之一,也是研究空戰中綜合信息處理技術至關重要的數據來源之一。本文研究實現機載相控陣雷達的任務調度機制和跟蹤濾波等關鍵技術,構建了能支持任意長仿真時間和包括機載運動平臺及仿真過程中切換雷達工作模式在內的動態仿真環境,同時考慮欺騙干擾環境下雷達的跟蹤處理和不同環境下雷達誤差的在線模擬,為研究機載雷達抗干擾技術以及多傳感器數據融合處理技術提供一個靈活可控、高逼真度的數字仿真試驗平臺。
1 仿真系統模塊與流程設計
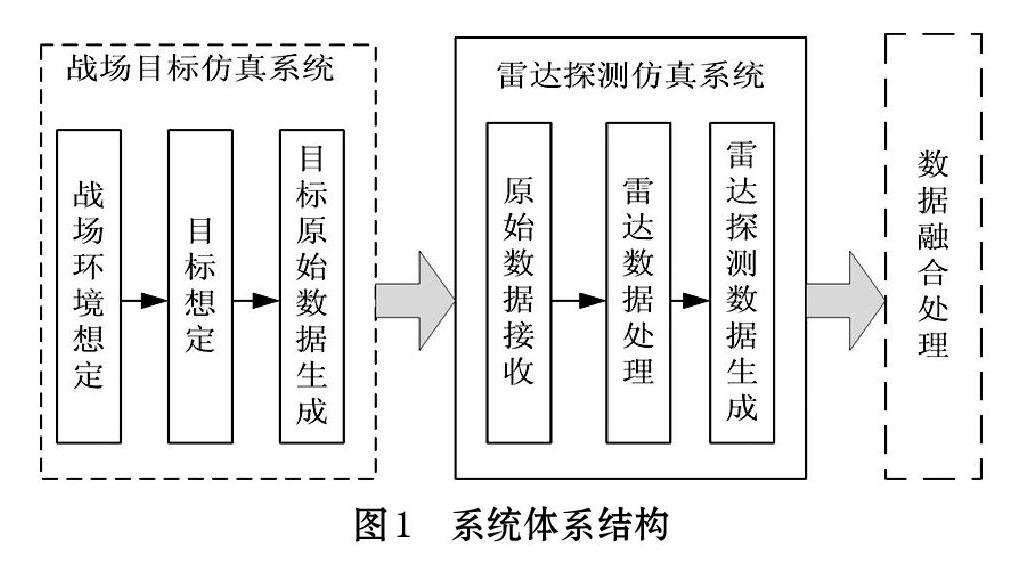
仿真系統按組成結構分為戰場虛擬目標及狀態仿真軟件和雷達動態探測仿真軟件兩大部分。其中,戰場目標仿真軟件用于制作想定,對目標進行布站,以及提供目標速度、位置、航跡、型號以及目標所搭載的輻射源信息等。雷達探測仿真軟件接收目標仿真軟件產生的目標原始數據,并進行相關雷達數據處理,如計算信噪比、交匯計算等,模擬雷達對目標的探測處理,產生雷達探測目標的相關數據,成為后端融合處理系統的輸入,軟件結構及相互關系如圖1所示[3]。
雷達探測功能仿真是通過仿真目標回波、接收機噪聲、干擾、雜波等信號的幅度信息來復現雷達的檢測過程,一般采用基于Monte Carlo的方法來實現[4]。主要是根據目標與雷達的交會幾何關系計算信號及干擾的功率。因此,需要對目標與雷達交會的幾何關系、目標與環境、雷達檢測過程、雷達測量精度等建立數學模型。
2 核心模塊的分析與建模
2.1 雷達檢測模塊
雷達檢測模塊主要功能就是獲取目標的點跡和檢測信息,主要完成坐標系轉換、交會計算、檢測計算等任務。設置雷達天線的方位、俯仰范圍,天線增益、波束寬度、發射功率等參數等計算雷達的探測范圍,通過與目標的交會判斷,目標回波功率、噪聲功率、信噪比、檢測及虛警概率的計算完成雷達對目標的檢測功能。
⑴ 坐標系轉換
由于目標和雷達平臺的位置參數都是在大地坐標系下給出的,為了得到目標相對于雷達平臺的位置和速度信息,需要將目在標大地坐標系下的位置和速度轉換到天線陣面直角坐標系。
⑵ 交會判斷
搜索時,利用俯仰和方位波束信息來判斷;當目標已被跟蹤上時,可以預測到目標的距離和速度時,就可以利用距離波門、速度波門、俯仰及方位波束信息來判斷。
假定目標在天線陣面方位坐標系下的位置(),雷達波束中心在天線方位坐標下的坐標(),方位和俯仰的波束寬度分別為,則交會成功的判斷條件為
⑶ 檢測計算
檢測計算是在計算目標回波功率、干擾功率、噪聲功率的基礎上,設定合適的門限電平通過雷達檢測方程得到檢測概率和虛警概率。
2.2 數據處理模塊
雷達數據處理模塊主要是進行多目標的跟蹤處理,具體包括航跡起始、航跡關聯,航跡質量管理,以及航跡的濾波預測。
⑴ 航跡起始以及航跡管理
航跡起始方法:對于每一幀中,沒有與任何航跡相關的點跡,均起始一條暫時航跡,其航跡質量為1(航跡質量共有0,1,2,3四等級,質量為0時航跡終止)。①以暫時航跡的第一點為中心P1,VmaxT(T為雷達的掃描周期)為相關門的半徑,如果下一個掃描周期雷達在此區域觀測到新的點跡P2,則形成暫時航跡的第二點,航跡質量升為2。②在獲得P1,P2兩點后,利用兩點的數據,形成暫時航跡的狀態估計,并對第三點進行預測,以預測點P3'為中心。新的點跡落入此關聯門,航跡質量升為3,轉化為可靠航跡。③如果沒有點跡落入,則外推一個點再做預測,關聯邏輯同上,若有觀測值滿足要求,則該航跡得到確認,轉化為可靠航跡,否則刪除該航跡[5]。
⑵ 航跡關聯
這里采用計算量少的最近鄰域相關法,即比較相關門內各個回波的更新向量v(k+1),使g(k+1)達到最小者被看作是真實目標的回波。其中
最近鄰域相關法按以下四條判別準則進行關聯。
① 若某個航跡門內只有一個觀測量,則該航跡與此觀測量相關,而不考慮其他。
② 若某個觀測量已落入一個航跡門內,則該觀測量與此航跡相關,而不考慮其他。
③ 當某航跡門內含有多個測量時,該航跡與最近的觀測量相關。
④ 當某觀測量落入多個航跡的門內時,該觀測量與最近的航跡相關。
⑤ 在航跡關聯時,當建立濾波器之后,采用橢球形相關門進行相關。
設γ為橢球跟蹤門的門限大小,當回波Z(k+1)的范數滿足關系式g(k+1)≤γ時,稱Z(k+1)為候選回波。
⑶ 濾波預測
考慮到目標可能會機動飛行,因此采用當前比較有效的機動目標跟蹤算法交互式多模型(IMM)算法,IMM算法包含了多個濾波器(各自對應著相應的模型)、一個模型概率估計器、一個交互式作用器(在濾波器的輸入端)和一個估計混合器(在濾波器的輸出端),多模型通過交互作用跟蹤一個目標的機動運動[6,7]。
本系統中濾波器采用三個模型,第一個為非機動(勻速運動)模型,第二個和第三個都為機動(勻加速運動)模型,狀態矢量和觀測值均在地心直角坐標系下表示。子濾波器采用Kalman濾波器。
2.3 資源管理模塊
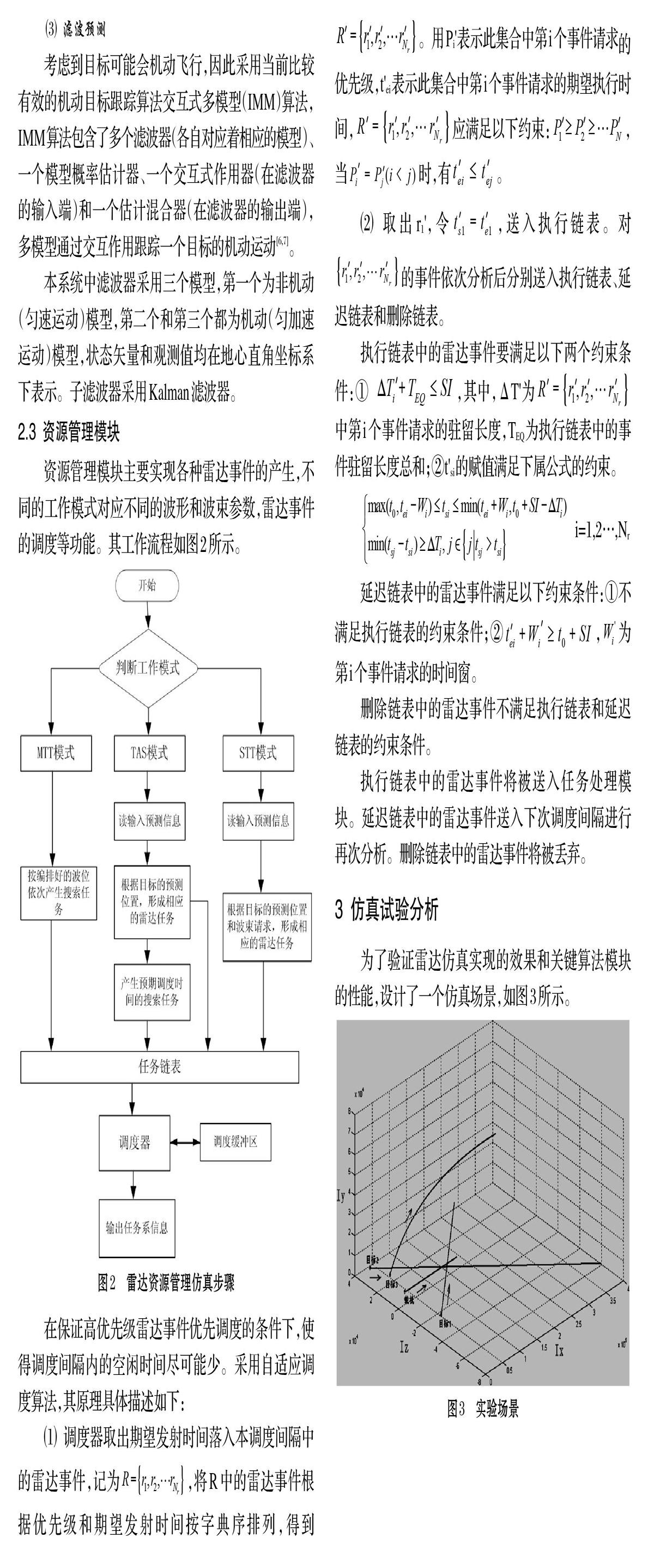
資源管理模塊主要實現各種雷達事件的產生,不同的工作模式對應不同的波形和波束參數,雷達事件的調度等功能。其工作流程如圖2所示。
在保證高優先級雷達事件優先調度的條件下,使得調度間隔內的空閑時間盡可能少。采用自適應調度算法,其原理具體描述如下:
⑴ 調度器取出期望發射時間落入本調度間隔中的雷達事件,記為,將R中的雷達事件根據優先級和期望發射時間按字典序排列,得到。用Pi'表示此集合中第i個事件請求的優先級,t'ei表示此集合中第i個事件請求的期望執行時間,應滿足以下約束:,當時,有。
⑵ 取出r1',令,送入執行鏈表。對的事件依次分析后分別送入執行鏈表、延遲鏈表和刪除鏈表。
執行鏈表中的雷達事件要滿足以下兩個約束條件:① ,其中,ΔT'為中第i個事件請求的駐留長度,TEQ為執行鏈表中的事件駐留長度總和;②t'si的賦值滿足下屬公式的約束。
延遲鏈表中的雷達事件滿足以下約束條件:①不滿足執行鏈表的約束條件;②,為第i個事件請求的時間窗。
刪除鏈表中的雷達事件不滿足執行鏈表和延遲鏈表的約束條件。
執行鏈表中的雷達事件將被送入任務處理模塊。延遲鏈表中的雷達事件送入下次調度間隔進行再次分析。刪除鏈表中的雷達事件將被丟棄。
3 仿真試驗分析
為了驗證雷達仿真實現的效果和關鍵算法模塊的性能,設計了一個仿真場景,如圖3所示。
載機勻速直線運動,初始位置(20000m,6000m,0m),飛行速度200m/s;目標1勻速直線運動,與載機飛行方向夾角方位-15度,俯仰0度,初始位置(30000m,6000m,-30000m),飛行速度340m/s;目標2勻速直線運動,與載機飛行方向夾角方位15度,俯仰0度,初始位置(15000m,6000m,30000m),飛行速度500m/s;目標3拋物運動,與載機飛行方向夾角方位0度,俯仰30度,初始位置(40000m,5000m,20000m),飛行速度200m/s。
選擇1號目標進行分析,在默認系統誤差(由目標RCS、信噪比和距離相互作用產生)下,測試雷達處理效果。從圖4可以看出,在濾波器作用下,目標1的跟蹤誤差小于檢測誤差,平滑濾波效果良好。檢測誤差變化范圍在一百米左右,跟蹤誤差變化范圍在幾十米以內。
(a) 默認系統誤差水平
(b) 人工干預誤差
手動修改跟蹤誤差水平(測距誤差100m,測速誤差20m/s,俯仰測角誤差0.005rad,方位測角誤差0.005rad),模擬不同環境下雷達的跟蹤效果。從圖4可以看出,檢測誤差變化范圍在一千米以內,跟蹤誤差變化范圍在幾百米以內,平滑濾波效果良好。
輸入欺騙干擾,距離拖引干擾(拖引速度:1000m/s,拖引時間:5s),速度拖引干擾(拖引速度:100m/s,拖引時間:5s)。同時切換雷達的工作模式TAS/STT/MTT。
(a) 目標1檢測跟蹤誤差
(b) 目標2檢測跟蹤誤差
雷達在TAS模式下運行,在400s時對1號目標進行STT變換(拖引欺騙干擾效果從圖5(a)可知),拖引期結束后仍按照TAS模式工作,雷達仍然能穩定跟蹤1號目標;550s之后,由于對2號目標進行單目標跟蹤(拖引欺騙干擾效果從圖5(b)可知),所以1號目標在這段時間內沒有檢測和跟蹤點跡;650s之后,由于角度原因,目標2未能交會和檢測。此后雷達傳感器轉入MTT工作模式,對1號目標進行搜索。
TAS工作模式下,采樣時間間隔為0.05s,MTT采樣時間間隔為8s,對單個目標TAS的跟蹤效果好于MTT模式。通過分析可知,建立的模型符合機載相控陣雷達的工作原理和性能要求。
4 結論
本文闡述了機載相控陣雷達動態探測目標的主要處理過程,對雷達數據處理的關鍵環節和相關模型給出了分析,并進行了仿真試驗。在仿真系統中,對目標回波、接收機噪聲、干擾、雜波等信號進行了模擬仿真,提出了機載相控陣雷達系統仿真的詳細流程,同時提供了系統在線實時修改雷達性能參數和不同工作模式的切換,使得可以方便的模擬不同場景和質量的探測數據。仿真結果說明了系統通用模型的可行性和有效性,其軟件系統已成功應用于某大型空戰仿真系統,為空戰系統的仿真研究提供了支撐平臺和分析評估依據。目前,針對通用模型進行功能、流程仿真研究,對其不同型號的相控陣雷達模型有待作進一步差異性分析,研究其參數特征進行調優試驗。
參考文獻(References):
[1] 喬向東,李濤.多傳感器航跡融合綜述[J].系統工程與電子技術,2009.31(2):245-250
[2] HeYou, PengYingning, LuDajin. Survey of multisensor?data fusion models[J]. Journal of Tsinghua University(Sci&Tech),1996.36(9):14-20
[3] 謝衛,彭鳴,陳懷新.基于MGIS的雷達探測模型仿真實現[J].信號與信息處理技術學術年會,2010:59-63
[4] 童維健,蔡桂友.相控陣雷達仿真技術研究[J].現代雷達,2008.30(4):45-49
[5] 何友,修建娟,張晶煒,關欣等.雷達數據處理及應用[M].電子工業出版社,2009.
[6] 丁鷺飛,耿富錄.雷達原理(第三版)[M].西安電子科技大學出版社,2003.
[7] 曹正林,楊向忠,劉衛華.機載相控陣雷達TAS方式的實現[J].電子與信息學報,2009.31(5):1136-1139