基于UWB的物流倉儲自動導(dǎo)引車的定位系統(tǒng)研究
2019-07-08 03:44:41姜春生廖穎慧蔡博
計算機時代 2019年5期
姜春生 廖穎慧 蔡博
摘? 要: 針對傳統(tǒng)物流倉儲環(huán)境下自動導(dǎo)引車定位精度低的問題,提出基于UWB的物流倉儲自動導(dǎo)引車定位系統(tǒng)。該定位系統(tǒng)采用改進增量卡爾曼濾波算法對采集到的距離值進行濾波,避免了受非視距(NLOS)及環(huán)境、測量設(shè)備等引起的誤差;與Taylor級數(shù)法對比,采用更適合的Chan算法進行解算獲得目標位置;設(shè)計編寫了基于MATLAB串口通信的上位機程序,實現(xiàn)了實時位置的可視化顯示。仿真試驗結(jié)果表明,該系統(tǒng)定位精度顯著提高,上位機界面為倉儲監(jiān)管提供了信息支撐。
關(guān)鍵詞: UWB; NLOS; 改進增量卡爾曼濾波; Chan算法; MATLAB串口通信; 上位機
中圖分類號:TP242? ? ? ? ? 文獻標志碼:A? ? ?文章編號:1006-8228(2019)05-05-04
Abstract: In order to solve the problem of low positioning precision in traditional logistics storage environment, a UWB positioning system of automatic guidance vehicle for logistics warehousing is proposed. The location system uses the improved incremental Kalman filter algorithm to filter the distance values collected by UWB, which avoids the errors caused by NLOS, measuring equipment and environment; Chan algorithm is adopted, which is more suitable to calculate the positioning result compared with Taylor series method; The host computer program based on MATLAB is designed, which supports the serial communication with automatic guidance vehicle and realizes the visual display of its position in real time. The simulation results show that the proposed system is obviously improved in positioning precision, and the host computer interface provides the information support for warehousing supervision.
Key words: UWB; NLOS; improved incremental Kalman filter; Chan algorithm; Matlab serial communication; host computer
0 引言
近年來,隨著電子商務(wù)、物流倉儲等行業(yè)的迅速發(fā)展,精準的位置需求已成為提高物流倉儲行業(yè)中物流自動化、智能化程度的關(guān)鍵。受物流倉儲環(huán)境下物料、貨架及倉庫環(huán)境等因素的影響,GPS、WiFi等傳統(tǒng)定位系統(tǒng)及定位方法越來越難以滿足需求[1-2]。超寬帶脈沖(Impulse Radio Ultra Wideband,IR-UWB)技術(shù)以其高分辨率、抗多徑效果好、穿透力強、高傳輸速率及低功耗等優(yōu)點成為當(dāng)前定位技術(shù)應(yīng)用的熱點。
現(xiàn)代物流倉庫種類繁多,倉庫環(huán)境復(fù)雜多變,這給倉儲自動導(dǎo)引車的定位帶來一定困難,單目視覺的定位雖然可行,但離大規(guī)模運用還有段距離[3];傳統(tǒng)的基于里程計、陀螺儀等的慣性導(dǎo)航方法存在累計誤差問題[4];WiFi、RFID等的無線傳感器通過信號強度來測距普遍精度不高[5];UWB技術(shù)是一種新興的基于納秒至微納秒的非正弦波窄脈沖傳輸數(shù)據(jù)而不利用載波搭載信息,帶寬極寬,穿透性能好,由多個接收器接收到參考標簽所發(fā)射的超寬帶脈沖信號進行定位,其結(jié)構(gòu)簡單、成本低、對環(huán)境適應(yīng)性好等突出優(yōu)點,因而適合在物流倉儲等環(huán)境下使用。而多徑干擾、非視距誤差及受環(huán)境、測量設(shè)備干擾或難以自校準帶來的系統(tǒng)量測誤差問題則是影響基于UWB定位精度的主要因素;對于NLOS誤差,兩步卡爾曼濾波雖然取得良好的仿真效果,但只適合其誤差特性已知環(huán)境;自回歸卡爾曼濾波算法則需要確定閾值來抑制NLOS誤差,歸納其統(tǒng)計特性;泰勒級數(shù)法則需要選擇合適的定位初值,否則會帶來更大的誤差甚至發(fā)散[6-8]。
本文首先闡述UWB的測距原理,分析NLOS誤差特性,采用改進增量卡爾曼濾波算法對所獲得的距離值進行濾波;對比Taylor與經(jīng)典Chan定位解算法,采用更適合的Chan算法對濾波后包含距離值得非線性方程進行解算獲得定位的坐標,對比小波去噪、卡爾曼濾波等,顯著提高了定位精度,具有良好的定位仿真效果;運用MALTBA串口通信功能,編寫上位機程序,實現(xiàn)實時距離位置的可視化,為物流倉儲管理提供了可靠的信息支撐。
1 TOF測距原理及誤差分析
1.1 基于TOF的測距方法
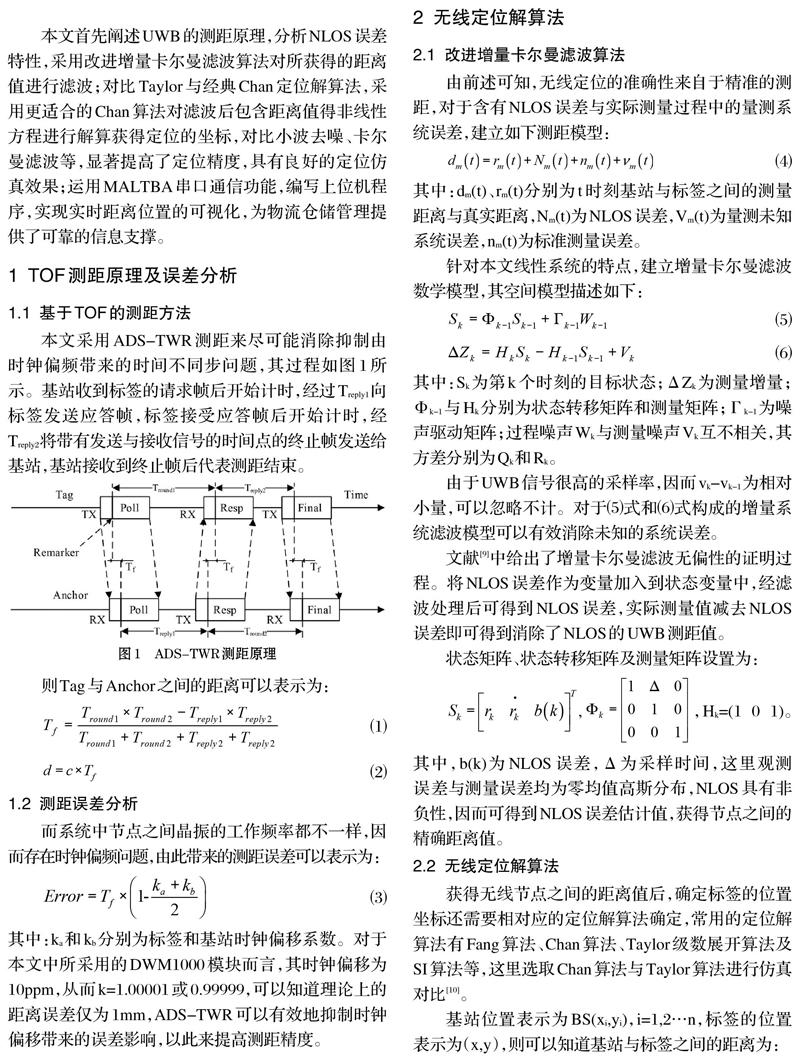
本文采用ADS-TWR測距來盡可能消除抑制由時鐘偏頻帶來的時間不同步問題,其過程如圖1所示。基站收到標簽的請求幀后開始計時,經(jīng)過Treply1向標簽發(fā)送應(yīng)答幀,標簽接受應(yīng)答幀后開始計時,經(jīng)Treply2將帶有發(fā)送與接收信號的時間點的終止幀發(fā)送給基站,基站接收到終止幀后代表測距結(jié)束。
則Tag與Anchor之間的距離可以表示為:
1.2 測距誤差分析
而系統(tǒng)中節(jié)點之間晶振的工作頻率都不一樣,因而存在時鐘偏頻問題,由此帶來的測距誤差可以表示為:
其中:ka和kb分別為標簽和基站時鐘偏移系數(shù)。對于本文中所采用的DWM1000模塊而言,其時鐘偏移為10ppm,從而k=1.00001或0.99999,可以知道理論上的距離誤差僅為1mm,ADS-TWR可以有效地抑制時鐘偏移帶來的誤差影響,以此來提高測距精度。
2 無線定位解算法
2.1 改進增量卡爾曼濾波算法
由前述可知,無線定位的準確性來自于精準的測距,對于含有NLOS誤差與實際測量過程中的量測系統(tǒng)誤差,建立如下測距模型:
其中:dm(t)、rm(t)分別為t時刻基站與標簽之間的測量距離與真實距離,Nm(t)為NLOS誤差,Vm(t)為量測未知系統(tǒng)誤差,nm(t)為標準測量誤差。
針對本文線性系統(tǒng)的特點,建立增量卡爾曼濾波數(shù)學(xué)模型,其空間模型描述如下:
其中:Sk為第k個時刻的目標狀態(tài);ΔZk為測量增量;Φk-1與Hk分別為狀態(tài)轉(zhuǎn)移矩陣和測量矩陣;Γk-1為噪聲驅(qū)動矩陣;過程噪聲Wk與測量噪聲Vk互不相關(guān),其方差分別為Qk和Rk。
由于UWB信號很高的采樣率,因而vk-vk-1為相對小量,可以忽略不計。對于⑸式和⑹式構(gòu)成的增量系統(tǒng)濾波模型可以有效消除未知的系統(tǒng)誤差。
文獻[9]中給出了增量卡爾曼濾波無偏性的證明過程。將NLOS誤差作為變量加入到狀態(tài)變量中,經(jīng)濾波處理后可得到NLOS誤差,實際測量值減去NLOS誤差即可得到消除了NLOS的UWB測距值。
狀態(tài)矩陣、狀態(tài)轉(zhuǎn)移矩陣及測量矩陣設(shè)置為:
2.2 無線定位解算法
獲得無線節(jié)點之間的距離值后,確定標簽的位置坐標還需要相對應(yīng)的定位解算法確定,常用的定位解算法有Fang算法、Chan算法、Taylor級數(shù)展開算法及SI算法等,這里選取Chan算法與Taylor算法進行仿真對比[10]。
Taylor算法式將⑺式在(x,y)的微小擾動處進行Taylor級數(shù)展開并去除高于二次項,最后設(shè)定閾值,對測量誤差矢量進行加權(quán)最小二乘法進行迭代,直到獲得滿足要求的估計定位值;Taylor算法無法給出具體的解析解,設(shè)置合理的初始值,在一定的噪聲程度下也可以給出較高的定位精度。
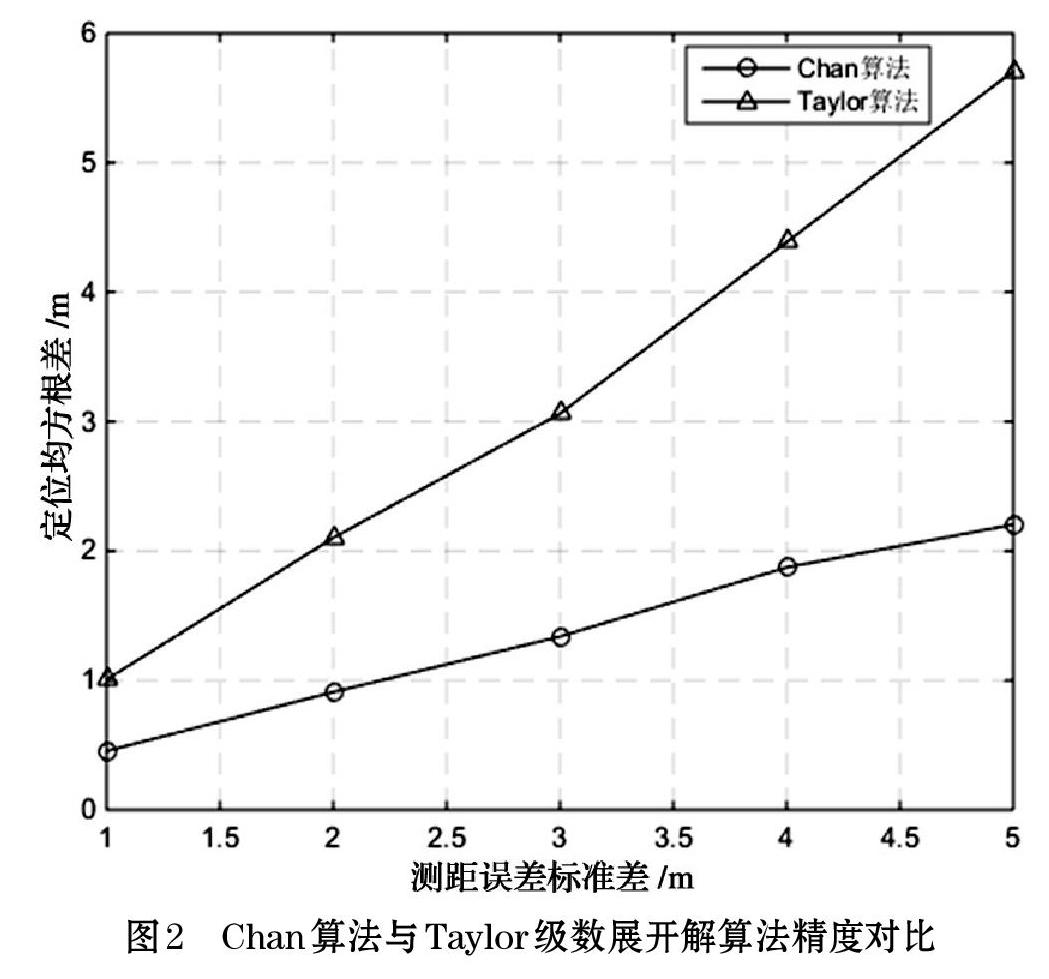
手動生成基站節(jié)點與標簽節(jié)點的坐標,仿真區(qū)域選定為基站兩兩之間的距離為100m的正方形區(qū)域。對于Taylor級數(shù)展開法,隨機生成其初始值(37,53),門限值設(shè)為0.01;基站與標簽之間的距離為基站與標簽之間的計算距離,加上服從高斯分布的測距誤差,其標準差分別取1m、2m、3m、4m、5m,通過多次計算取平均的算法得到其誤差均方根值,得到的仿真結(jié)果對比如圖2所示。
兩種定位解算法在一定的條件下都可以達到較好的定位解算效果,但Taylor解算法無法給出具體的表達式解,其解算精度受定位初值影響太大,若初始估計值與實際位置相差太大,其算法的收斂性可能受到影響;Chan算法不需要初值,僅進行兩次迭代就可得到最終結(jié)果,且在消除了NLOS誤差或在LOS環(huán)境條件下。從圖3中可以看出,相同測距誤差標準差下,Chan算法的定位均方根誤差要小得多,具有良好的定位性能[11]。
3 基于MALTAB串口通信的上位機
MATLAB中的設(shè)備控制箱支持MATLAB與儀器儀表進行通信,從而支持對串口通信。
設(shè)計其上位機程序時,首先需要對進行需求分析,針對倉儲物流自動導(dǎo)引車的定位系統(tǒng),所設(shè)計的上位機程序功能框圖如圖3所示。
4 仿真試驗與分析
采用DW1000定位模塊作為系統(tǒng)硬件的基礎(chǔ)單元,為了更加精確的在倉庫中搭建定位系統(tǒng),布置四個基站,搭建物流倉儲環(huán)境如圖4所示。
在倉儲倉庫環(huán)境下設(shè)置四個基站,選取一組點進行定位測試試驗,采集到的測試數(shù)據(jù)整理后如圖5。從圖5中可以知道,與傳統(tǒng)小波去噪、卡爾曼濾波相比,經(jīng)過本文濾波算法后的距離值穩(wěn)定性顯著提高,與真實值偏離程度減小,提高了測距精度;試驗場景中的定位平均誤差在95mm左右,定位精度高,能滿足試驗的要求。
運行MATLAB中的上位機程序,得到的某一刻的目標標簽的位置在MATLAB中如圖6所示。
5 結(jié)論
本文以物流倉儲環(huán)境下自動導(dǎo)引車的定位系統(tǒng)為研究背景,采用當(dāng)前定位研究熱點的UWB定位方式,對于倉儲環(huán)境下存在的NLOS誤差、環(huán)境或測量設(shè)備的引起的系統(tǒng)量測誤差,采用改進增量卡爾曼濾波算法對其去噪濾波,運用經(jīng)典Chan算法解算獲得其位置坐標,設(shè)計了基于倉儲環(huán)境下的MATLAB上位機顯示系統(tǒng),在倉儲倉庫環(huán)境下導(dǎo)引車的定位取得良好的應(yīng)用效果,在物流倉儲迅猛發(fā)展的大環(huán)境下有廣闊的應(yīng)用前景。當(dāng)然,本文在定位算法方面還有待進一步改進與優(yōu)化。
參考文獻(References):
[1] 孫小文,張小超,趙博等.農(nóng)資倉儲脈沖超寬帶室內(nèi)定位系統(tǒng)設(shè)計與試驗及誤差分析[J].農(nóng)業(yè)工程學(xué)報,2017.33(1):23-29
[2] 朱士光,張帆,張聰.基于慣導(dǎo)和視覺定位的AGV倉儲機器人[J].中國新技術(shù)新產(chǎn)品,2018.3:21-22
[3] 劉麗軍.基于單目視覺的倉儲物流機器人定位方法探討[J].電子制作,2018.12:63-64
[4] 張濤,馬磊,梅玲玉.基于單目視覺的倉儲物流機器人定位方法[J].計算機應(yīng)用,2017.37(9):2491-2495
[5] 王紹丹,王宜懷,劉鍇.基于射頻識別和無線傳感網(wǎng)融合技術(shù)的倉儲定位方法研究[J].計算機應(yīng)用研究,2018.35(1):195-198
[6] 徐英凱,曹浩,陳曉群.一種抑制非視距傳播誤差的混合定位算法[J].計算機工程,2013.39(7):119-122
[7] He Jie, Geng Yi-shuang, Liu Fei, Xu Cheng. CC-KF:Enhanced TOA performance in multipath and NLOS indoor extreme environment [J].IEEE Sensors Journal,2014.14(11):3766-3774
[8] 張恒.基于UWB的室內(nèi)高精度定位方法研究與應(yīng)用[D].遼寧工程技術(shù)大學(xué),2015.
[9] 傅惠民,吳云章,婁泰山.欠觀測條件下的增量Kalman濾波方法[J].機械強度,2012.34(1):43-47
[10] 蔡博.基于UWB的AGV高精度室內(nèi)定位系統(tǒng)研究[D].西南交通大學(xué),2018.
[11] Shuai He, Xiao-dai Dong, Wu-Sheng Lu. Localization algorithms for asynchronous time difference of arrival positioning systems[J]. EURASIP Journal on Wireless Communications and Networking,2017.1:1
