輪轂電機不平衡徑向力導致的整車振動研究進展*
2019-07-10 07:30:54王艷陽楊馥寧商福興
汽車技術 2019年4期
王艷陽 楊馥寧 商福興
(1.西華大學,汽車與交通學院,成都 610039;2.西華大學,汽車工程四川省高校重點實驗室,成都 610039)
主題詞:開關磁阻電機 不平衡徑向力 輪轂驅動 整車振動 振動控制
1 前言
輪轂驅動式電動汽車的驅動電機布置在輪轂內,其結構緊湊、傳動鏈短,方便應用線控技術,在電動汽車的發展中受到越來越多的關注[1-4]。輪轂電機作為輪轂驅動電動汽車的關鍵驅動部件,其性能直接決定了車輛的動力學性能,而開關磁阻電機啟動扭矩大、調速范圍寬、能量轉換效率高,能較好地滿足輪轂電動車的要求,因而在電動車上的應用受到重視[5-8]。然而,由于開關磁阻電機的振動問題使電動車平順性與操縱穩定性的矛盾激化,影響了車輛的舒適性和安全性,這也是其沒有被廣泛接受的主要原因之一[9-10]。造成開關磁阻電機振動的一個主要因素是電機的不平衡徑向力[11-13]。由于不平衡徑向力不經減振而直接作用在車輪上,不但會惡化電機的工作環境、降低其疲勞壽命,而且會增大輪胎動載荷,降低其抓地附著能力,增加汽車的側翻風險。較差的平順性會降低駕駛員的疲勞極限,影響行駛安全,而過大的輪胎動載荷會造成輪胎故障甚至爆胎,另外,汽車側翻也是一種嚴重的交通事故。
針對上述問題,本文通過對國內外開關磁阻電機振動問題的研究進行綜述,重點分析開關磁阻輪轂電機不平衡徑向力導致的整車振動問題,以期進一步明確開關磁阻輪轂電機噪聲和振動的產生機理及其控制方法,為解決開關磁阻電機不平衡徑向力導致的電動汽車平順性與操縱穩定性矛盾惡化的問題提出合理的解決思路,并對有待進一步解決的問題進行討論,對未來的研究方向進行展望。
2 電機振動和噪聲的產生因素及機理
電機振動與噪聲的主要來源包括3個方面:機械噪聲、空氣噪聲和電磁噪聲[14-16]。機械噪聲主要是指軸承噪聲、碳刷與集電環境摩擦產生的噪聲以及轉子不平衡產生的噪聲。針對機械噪聲需要提高軸承加工精度,減小安裝誤差,進行嚴格的動平衡校驗,采用牢固的碳刷座結構等方法予以控制。空氣噪聲主要是由于風扇轉動,使空氣流動、撞擊、摩擦而產生的。對于空氣噪聲的抑制,需要通過風葉和風扇的結構設計降低空氣渦流,使風路暢通,減小空氣的撞擊和摩擦,或者采用隔聲或吸聲材料。電磁噪聲是指作用在電機定、轉子空氣隙中的交變電磁力導致的電機定、轉子振動及噪聲。電磁力包括徑向分量和切向分量兩個部分。電磁力徑向分量在引起電機振動及噪聲方面起主要作用,它使定子鐵心產生徑向振動,徑向振動產生的噪聲為電機電磁噪聲的主要成分。而在電機氣隙存在偏心的情況下,電機不平衡徑向力將會進一步加劇電機振動。在工程應用中,由于軸向載荷、加工誤差等原因,開關磁阻電機的氣隙偏心率可高達10%[17-18]。而在實際運行工況中,受外界激勵、摩擦力等因素影響,電機的相對偏心率甚至可達30%~60%[19-20]。因此,本文重點研究開關磁阻電機不平衡徑向力所導致的電機與輪轂驅動電動車的耦合振動及其抑制方法。
美國學者Cameron D E及其研究團隊于1992年系統研究了開關磁阻電機的振動和噪聲產生機理,明確指出由電機的定子與轉子間的徑向磁拉力導致的定子徑向形變是電機振動和噪聲的主要來源。而且,當定子徑向形變頻率與定子固有頻率接近一致時會導致非常嚴重的振動和噪聲[11]。同時,文獻[21]、文獻[22]的研究也表明,由氣隙偏心造成的開關磁阻電機不平衡徑向力和扭矩波動是導致電機振動和噪聲的主要因素。
為了研究氣隙偏心導致的不平衡徑向力,美國學者Iqbal Husain等人采用解析的方法推導出一種開關磁阻電機不平衡徑向力的計算公式[23]。文獻[9]、文獻[24]則預測了開關磁阻輪轂電機的噪聲輻射。韓國學者Ha K H、Hong JP等人采用有限元分析方法從轉子-軸承系統的角度分析了開關磁阻電機不平衡徑向力導致的轉子振動軌跡,并對轉子振動的穩定性進行了估計[25]。研究結果表明,在電機氣隙靜態偏心為10μm、不平衡力矩為10 g·mm的工況下,開關磁阻電機不平衡徑向力作用下電機轉子的徑向運動軌跡長度最高可達60μm,軸向振動最高可達40μm。
上述工作以研究電機本身的振動機理為主,對開關磁阻電機作為輪轂電機的振動特性研究較少。在車輛實際運行工況中,路面激勵會導致電機定子和轉子的振動,從而導致氣隙偏心。而氣隙偏心會產生電機不平衡徑向力,不平衡徑向力又加劇了定子和轉子的振動,從而使氣隙偏心惡化。因此,路面激勵、氣隙偏心和電機不平衡徑向力相互耦合。這種復雜的機電磁耦合作用會產生較大的電機不平衡徑向力。不平衡徑向力不經減振直接作用在車輪上,會導致車輪和車身的振動,車輪和車身的振動又直接影響輪轂電機的振動,三者相互耦合。把開關磁阻電機從車輛行駛工況中孤立出來,單獨研究其振動機理,無法準確反映電機的實際振動特性,更無法進一步探求電機、車輪和車身系統間的機電耦合振動機理。
3 車輪與電機耦合振動的關系及其頻率特性
汽車在行駛時,開關磁阻電機不平衡徑向力直接作用在輪轂上,影響整車的舒適性和安全性。文獻[26]、文獻[27]分析了開關磁阻電機不平衡徑向力對車輛舒適性的影響,明確了路面激勵、電機氣隙偏心、不平衡徑向力與車輪振動的耦合關系,如圖1所示。
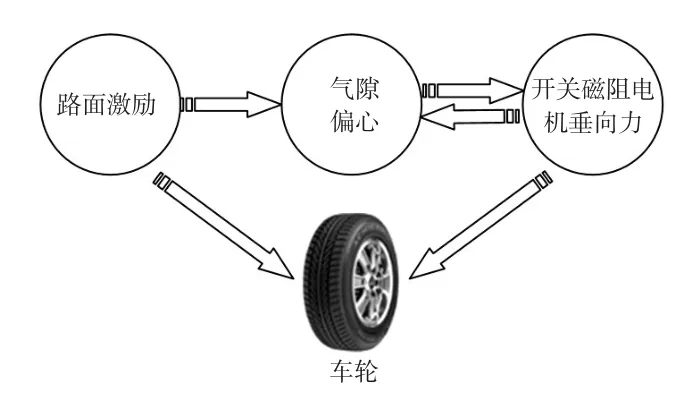
圖1 路面、車輪與電機的耦合振動關系[26]
文獻[26]建立了包含車輪、懸架和轉向子系統的輪轂驅動電動汽車整車動力學模型,初步探索了開關磁阻電機不平衡徑向力對車輛舒適性和穩定性的影響。其模型原理如圖2所示。考慮到電機不平衡徑向力Fv作用于電機轉子和定子之間,根據車輪各部件與轉子和定子的機械連接關系,將其簡化為兩部分質量:旋轉組件質量mu(轉子、輪胎、輪轂和制動盤等)和非旋轉組件質量mus(定子、電機殼體、支撐軸和制動鉗等),中間由輪轂軸承相連接,建立車輪質量-彈簧模型。電機定、轉子之間的氣隙偏心則為旋轉組件和非旋轉組件之間的相對位移,由此產生的電機不平衡徑向力作用在車輪旋轉組件和非旋轉組件之間,其車輛頻率響應如圖3所示。由圖3可見,在開關磁阻電機垂向激勵下,整車的簧載質量、側傾角和俯仰角的響應峰值約在1.2 Hz處,而輪胎跳動的響應峰值約在6.5Hz處。因此,電機垂向激勵可以導致車身側傾運動和輪胎跳動的共振,整車的穩定性和安全性降低。由開關磁阻電機垂向激勵引起的共振問題有必要深入研究。
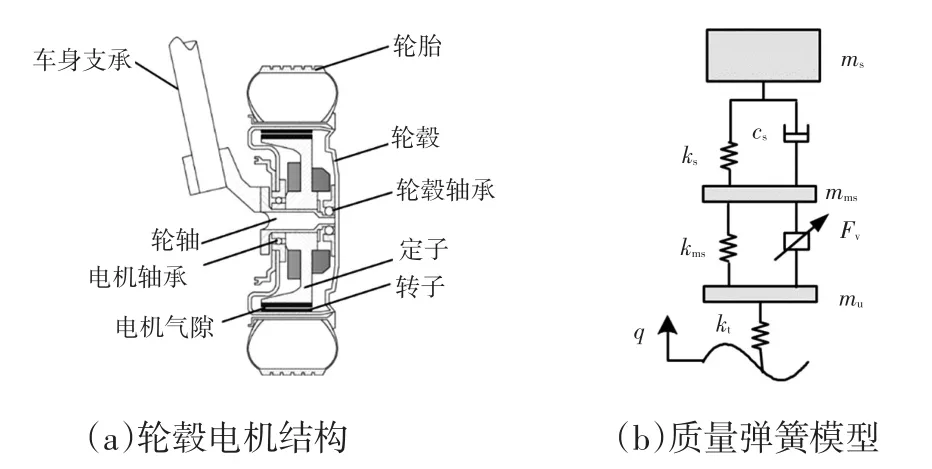
圖2 輪轂電機及其質量彈簧模型[26]
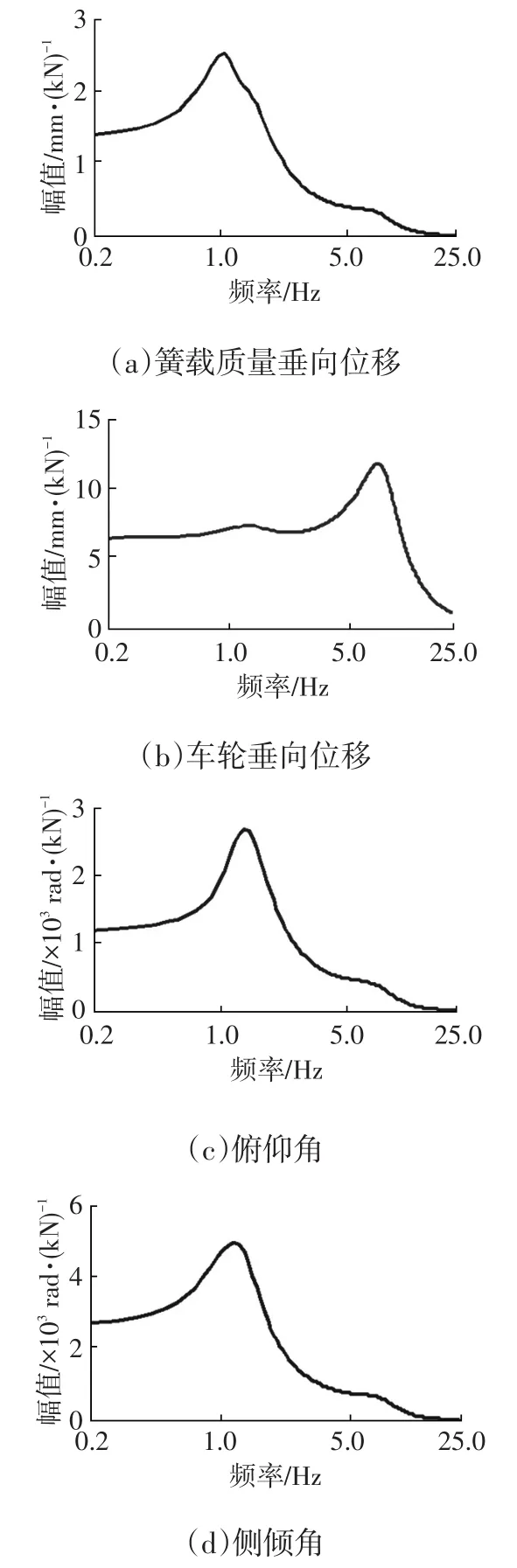
圖3 車輛在電機垂向激勵下的幅值響應[26]
4 車輪與電機耦合振動對整車性能的影響
在上述研究的基礎上,文獻[26]在假定開關磁阻輪轂電機偏心率為10%的情況下,研究了不平衡徑向力對車輛安全性的影響。車速為60 km/h時,開關磁阻電機不平衡徑向力超過3 kN,如圖4所示。圖5所示為車輛側翻因子(Rollover Critical Factor,RCF)在考慮和不考慮電機不平衡徑向力兩種工況下,對魚鉤轉向的時域響應。由圖5可見,在不平衡徑向力激勵下,車輛的側翻因子增大17.80%。該結果表明,開關磁阻電機不平衡力降低了車輛的側向穩定性和防側翻特性。
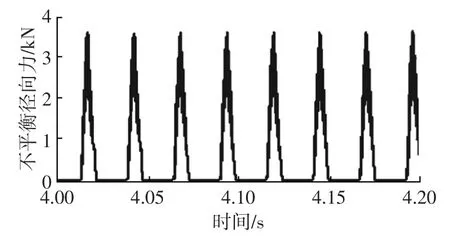
圖4 開關磁阻電機不平衡徑向力[26]
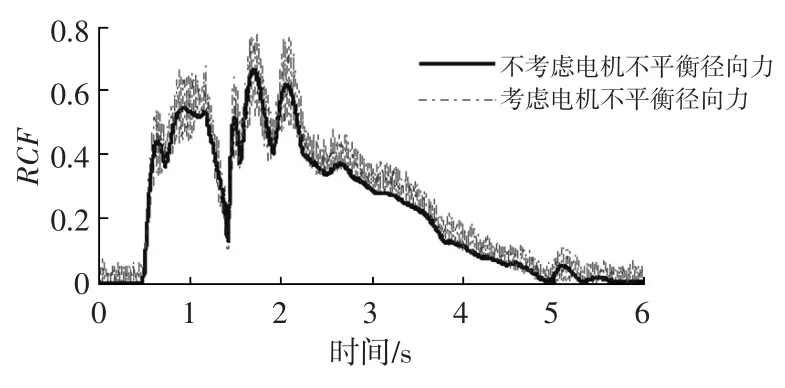
圖5 車輛側翻因子對魚鉤轉向的時域響應[26]
文獻[27]在隨機路面工況下,研究了開關磁阻電機不平衡徑向力對車輛舒適性、行駛安全性和電機安全性的影響,如表1所示。研究表明,在考慮電機不平衡徑向力的情況下(Case2、Case4)電機氣隙、車身垂向加速度和輪胎動載荷都有一定程度的提高。該結果表明電機不平衡徑向力會降低車輛的舒適性、行車安全性和電機的安全性。
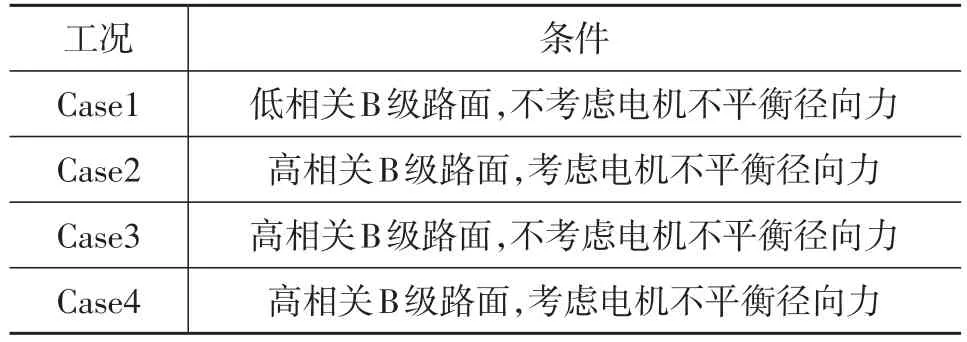
表1 車輛振動分析工況表[27]
5 不平衡徑向力導致的電機振動和噪聲的控制
5.1 傳統控制方法
傳統的電機振動和噪聲控制研究主要包括電機本體結構的測試、優化及電機控制器的優化兩個方面。
在電機本體結構的測試、優化方面,主要借助于理論計算和試驗分析,研究電機的結構參數對其振動特性的影響,明確電機的結構參數,降低電機本體的振動和噪聲。美國學者Garrigan及其研究團隊,深入分析了開關磁阻電機徑向力的靜態特性,給出了電機徑向力的預測模型[28]。研究結果表明,并聯繞組下電機徑向力遠低于串聯繞組下的徑向力,因此,可以通過改變繞組方式控制電機振動和噪聲。韓國學者Yang H Y等人通過改變轉子的幾何結構來降低扭矩波動[29]。文獻[30]~文獻[32]也針對電機的振動在電機本體結構的優化上開展了相關研究。東北大學張義民教授的科研團隊在不考慮路面激勵的情況下分析了開關磁阻電機徑向力對電動車舒適性和安全性的影響[33-34]。清華大學馬噢、李建秋教授的研究團隊對評定開關磁阻電機振動特性的兩種激勵方法進行了比較研究。同時,香港理工大學的Xue X D和Cheng KW E等學者、哈爾濱工業大學趙桂范教授和江蘇大學的江暉、趙德安教授的研究團隊也在這方面開展了大量的研究工作,取得了豐碩的成果[35-38]。
在電機控制器的優化方面,可運用合適的控制算法,優化電機控制電流、導通角度等控制參數,以抑制開關磁阻電機不平衡徑向力及其電機振動。美國學者Iqbal Husain等人早在1996年就提出通過脈沖寬度調制(PulseWidth Modulation,PWM)方法實現開關磁阻電機的最小扭矩波動控制[39]。日本Aisin Seiki公司的Hiroyuki Inagaki等人采用2自由度的H∞控制算法設計開關磁阻電機控制器,用于抑制電機扭矩波動和不平衡徑向力引起的電動車傳動系統的振動[40],控制框圖如圖6所示。

圖6 開關磁阻電機2自由度H∞控制框圖[40]
華中科技大學詹瓊華教授及其科研團隊較早研究了電動車用開關磁阻電機的設計及控制系統的關鍵技術,取得了一系列的研究成果,如文獻[41]研究了開關磁阻電機的定子振動模態,指出加固繞組和采用周向散熱筋結構有利于降低電機噪聲,文獻[42]則對低轉矩脈動、低噪聲的開關磁阻電機控制器進行了研究,文獻[43]~文獻[45]也針對電機的振動對控制器進行了優化設計。圖7所示為詹瓊華團隊研制的開關磁阻電機驅動的電動汽車。
上述工作主要通過改進電機的本體結構和優化電機控制器來抑制電機的振動,而把開關磁阻電機作為輪轂電機納入整車系統,從整車系統的角度考慮電機振動的影響及其控制的研究較少。開關磁阻電機作為電動車的關鍵驅動部件直接安裝在車輪上,電機和車輪一體轉動,不僅受到路面激勵和不平衡載荷等因素的影響,而且怠速運行以及啟停工況頻繁,運行工況復雜。電機的振動一方面會直接引起車輪的振動,增大輪胎動載荷,降低附著能力,增加汽車側翻風險,另一方面會直接通過懸架系統傳遞給車身,影響行駛平順性。而割裂電機與車身和車輪的耦合振動關系,單獨研究電機的振動影響及控制方法,無法從整車系統層面提高輪轂驅動電動汽車的平順性和操縱穩定性。
圖7 開關磁阻電機驅動電動車[41]
5.2 針對電機驅動系統的特殊減振系統
由于輪轂電機的引入,整車的非簧載質量會顯著增加,進而使車輪轉動慣量顯著增加。輪胎載荷增大,一方面會降低整車的行駛安全性,另一方面會影響整車的加速性能。針對非簧載質量增加這一問題,文獻[46]~文獻[49]分析了懸架結構的非線性特性對輪邊驅動電動車的影響。研究結果表明,輪轂電機的引入會增加整車非簧載質量(約15 kg),不僅影響車輪行駛安全性,而且會降低整車平順性。為了降低整車非簧載質量,文獻[48]提出了一種動態吸振形式的輪邊驅動系統,通過在轉向節上加裝動力吸振器,將電機質量轉換為吸振器質量,不僅可以直接降低非簧載質量,還可以利用分離出來的電機質量進行吸振。文獻[50]將定子做成中空,通過減振裝置分別與輪軸和車身相連,使輪轂電機的定子質量由非簧載質量轉移至簧載質量,同時通過系統參數優化,降低輪胎動載荷的同時提高了車輛的平順性。文獻[51]通過引入萬向節,也達到降低非簧載質量的目的。上述工作的基本思路是將輪轂電機的一部份質量抽離出來作為減振器的質量,從而降低整車非簧載質量。
5.3 借助新型懸架的控制方法
隨著輪轂電機和新型懸架技術的發展,輪邊驅動結構集成了越來越多的功能。法國米其林公司率先提出了“主動輪”技術。該技術將轉向、制動和懸架功能集成到輪轂電機中(見圖8),用車輪內置懸架代替傳統車上的機械懸架,為有效解決輪轂電機振動導致的汽車舒適性、安全性問題提供了新思路。

圖8 米其林主動輪系統
文獻[52]提出了一種由雙電機構成的特殊輪邊驅動結構,如圖9所示。當兩個電機驅動力方向不同時,雙電機結構會產生垂直分量,直接用于驅動懸架降低或者升高,從而實現懸架的主動控制;當兩個電機驅動力方向相同時,其輸出直接用于車輛驅動。
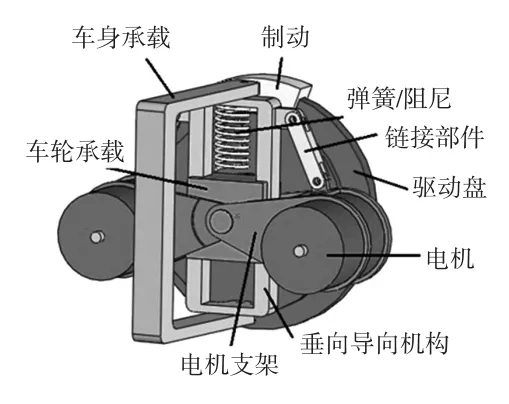
圖9 克萊姆森大學的主動輪原理方案[52]
Mingchun Liu及其研究團隊采用主動懸架結合電機可調阻尼器的方法,通過模糊PID和最優控制實現電機和整車的振動主動控制[53]。圖10所示為其輪轂電機可調阻尼器及懸架結構,圖11所示為其相應的控制策略框圖。
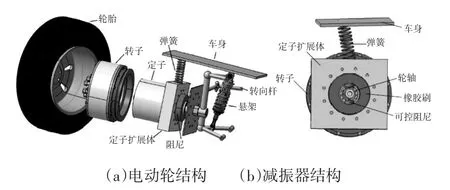
圖10 輪轂電機可調阻尼器及懸架結構[53]
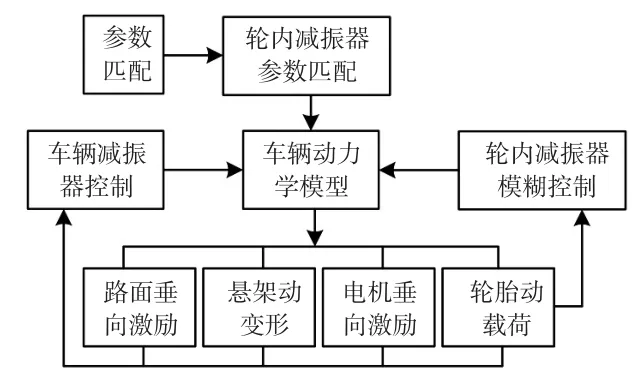
圖11 整車綜合控制策略[53]
此外,Massimo C及其研究團隊針對輪轂電機的跳動問題,進行了懸架匹配設計和電機應力強度方面的研究[54]。文獻[55]、文獻[56]從電機、車輪和車身的機電耦合方面分析了開關磁阻輪轂電機不平衡徑向力對車輛舒適性和安全性的影響,并借助電磁主動懸架抑制電機不平衡徑向力,提高車輛的舒適性和安全性。
綜上所述,新型懸架技術是一種從電機、車輪和車身耦合振動的全新角度系統考慮電機振動對車輛平順性和操縱穩定性的影響及控制的新方法,為解決由電機不平衡徑向力導致的整車平順性和操縱穩定性惡化的問題提供了新思路。在車輛實際運行工況中,由于電機和輪胎的非線性特性及路面激勵的隨機特性,電機、車輪和車身系統表現出復雜的耦合關系,使得這類機電振動問題的研究相對困難,因此研究者較少。
6 存在的問題及發展趨勢
開關磁阻電機在輪轂驅動電動車上有著廣闊的應用前景,盡管國內外對開關磁阻電機的振動和噪聲產生機理及其控制的研究取得了很大的進展,但目前尚存在幾個方面的問題有待進一步解決:
a.開關磁阻電機不平衡徑向力的計算研究。開關磁阻電機具有機電磁多場強耦合特性,其不平衡徑向力受電機氣隙偏心、定轉子重合角、磁場飽和特性以及扭矩波動等多種非線性因素的影響。而開關磁阻電機作為輪轂電機時,路面激勵及頻繁的怠速、啟動工況又加劇了上述因素的影響。
b.不平衡徑向力對電動汽車平順性和操縱穩定性的影響特性分析。如何明確不平衡徑向力與路面激勵、氣隙偏心等關鍵參數的耦合度和相互影響關系,探求電機、車輪和車身耦合振動機理,是開關磁阻輪轂電機研究的關鍵問題。
c.借助新型懸架技術抑制電機不平衡徑向力、控制電機振動的研究。通過本體結構和控制器的優化進行電機振動控制,是目前電機控制領域普遍采用的方式。而從電機、車輪和車身這一機電耦合系統出發,以提高輪轂驅動電動汽車各工況下的綜合性能為目標,研究新型懸架的車身姿態控制,抑制電機不平衡徑向力,修正氣隙偏心,在保證車身平穩的同時實現輪胎的良好接地性,提高輪轂驅動電動汽車的平順性和操縱穩定性,是開關磁阻輪轂電機振動控制的發展趨勢。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40