基于三相短路的永磁同步電機電感參數測量方法
2019-07-10 07:30:54曹艷玲許菁
汽車技術 2019年4期
關鍵詞:測量
曹艷玲 許菁
(長春工程學院,長春 130012)
主題詞:永磁同步電機 直軸電感 交軸電感 三相短路
1 前言
永磁同步電機效率高、功率密度大、恒功率區寬,且內嵌式永磁同步電機因其磁阻效應產生的磁阻轉矩可大幅提高電機的轉矩密度,得到了越來越廣泛的應用[1-4]。車用永磁同步電機以轉矩控制模式為主,要實現精準的轉矩控制,必須做好基速區和弱磁區的電流軌跡規劃[5-6],電流軌跡與直軸電感Ld、交軸電感Lq密切相關,兩者隨電流的變化而變化,因此,其準確測量是轉矩控制的前提。另外,對于基于磁場定向的矢量控制,需要用Ld和Lq進行直軸和交軸的電壓解耦前饋計算,如果這兩個參數不夠準確,將導致PI調節范圍變大,進而影響電機控制的精度及穩定度。同時,電機參數變化會直接導致凸極率(Lq與Ld的比值)變化,這會使得弱磁擴速和轉矩輸出能力發生改變。基于上述考慮,必須對永磁同步電機電感參數準確測量以確定其變化規律,以便實現更精準的電機控制。
為了考慮磁飽和效應對電感參數的影響,文獻[7]先根據電壓和電流測量數據,計算出不同轉子位置和電流下的磁鏈,再由磁鏈計算出電機自感、互感以及直、交軸電感參數。文獻[8]先固定電機轉子在某個機械位置,然后將A相繞組接到外部工頻電源,測出電流隨時間的變化曲線得到電感,通過改變電機轉子位置測量電感值與轉子位置的關系。文獻[9]采用電壓積分法,其基本原理是電感等于電感中總磁鏈與流過電流的比值,先將電感通過電阻短路,再斷開回路,對電阻兩端的電壓積分得出磁鏈。該方法的難度在于消除電壓測量中的直流偏置,調整轉子直軸與定子合成磁動勢對齊和可靠固定,另外,電橋電阻阻值和功率選擇較難,電橋平衡調整時間長。
從以上文獻分析可以看出,永磁同步電機電感參數測量過程需解決電機轉子機械定位不準、直流偏置導致電壓積分誤差累積以及電橋平衡的問題。本文提出一種基于三相短路狀態下的永磁同步電機電感參數測量方法,使電機三相處于短路狀態,拖動電機到設定轉速,采集三相電流和轉速,根據轉矩公式計算出交軸電感,試驗結果表明,該方法可消除直、交軸磁飽和的影響,能夠準確測量直、交軸電感參數,滿足電機轉矩控制需求。
2 測量原理
2.1 永磁同步電機數學模型
本文的研究對象是三相星形接法的正弦波永磁同步電機,采用d-q軸數學模型,它不僅可以分析電機的穩態運行性能,同樣可用于分析電機的瞬態性能[10]。在建立數學模型之前,先作如下假設:忽略鐵心飽和,不計渦流及磁滯損耗;永磁材料的電導率為零;轉子上無阻尼繞組;相繞組中感應電動勢波形為正弦。
取永磁體基波勵磁磁場軸線為d軸,沿轉子旋轉方向超前d軸90°電角度為q軸,d-q坐標系與轉子同步旋轉,其等效電路如圖1所示。
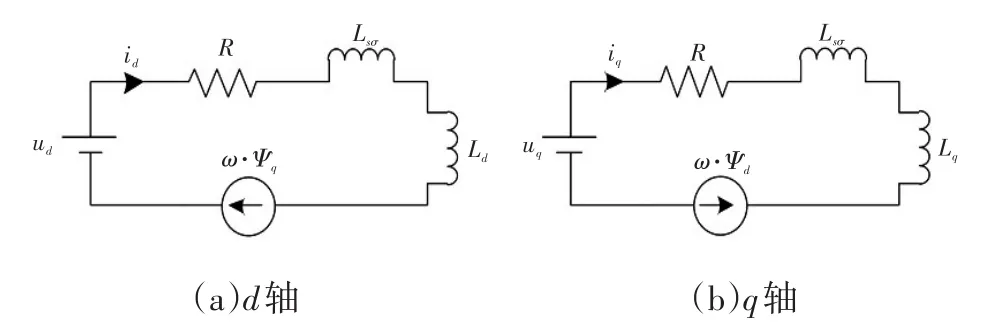
圖1 d-q坐標系下的等效電路
經d-q坐標變換后,其穩態電壓方程為:
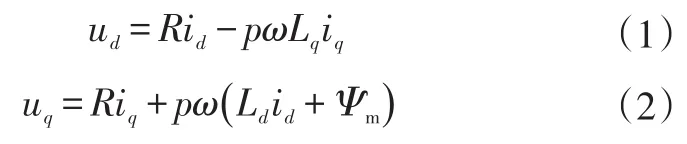
式中,ud、uq分別為d軸、q軸電壓;id、iq分別為d軸、q軸電流;Ld、Lq分別為d軸、q軸電感;R為定子電阻;Ψm為永磁體磁鏈;w為轉子機械轉速;p為電機轉子極對數。
2.2 直軸電感測量原理
在電機三相短路情況下,直交軸電壓為零,則有:
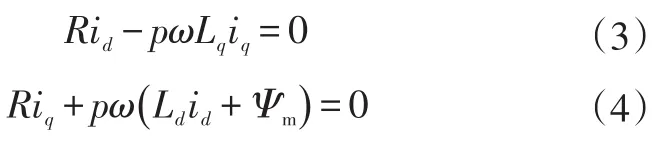
將式(3)帶入式(4),消去交軸電流iq,進一步可得:

可見,當轉速w→∞時,式(5)第1項趨近于零,則有:

由式(6)可知,直軸電感與永磁體磁鏈成正比,與直軸電流成反比。對于永磁同步電機來說,永磁體磁鏈與電機的空載反電勢成正比,而反電勢是由空載氣隙基波磁通在電樞繞組中感應產生的。因此,測量電機空載相反電勢E0和轉速w即可得到永磁體磁鏈Ψm:

d-q軸電流可以通過測量三相交流電流和電機轉子位置θ得到,其中,克拉克(Clark)變換公式為:

式中,ia、ib和ic分別為U、V和W相電流;iα、iβ分別為靜止兩相直角坐標系下的α軸和β軸電流。
帕克(Park)變換公式為:

由此,直軸電感Ld可通過式(6)計算得出。
2.3 交軸電感測量原理
永磁同步電機轉矩公式為:

由式(11)可得交軸電感Lq為:

其中,電磁轉矩Te可通過測功機的轉矩傳感器直接測量得出。
綜上,由永磁同步電機電壓方程和電磁轉矩公式,在電機三相短路條件下,通過直軸和交軸電流、永磁體磁鏈、電磁轉矩的測量,即可得出直、交軸電感參數的數值。
3 系統設計
電感參數測量系統總體框架如圖2所示,主要由2個部分組成:一部分由測功機、永磁同步電機、電機轉速和轉矩傳感器、相電流傳感器和電壓傳感器構成;另一部分是軟件檢測系統,包括Clark和Park變換單元、永磁體磁鏈檢測單元和直、交軸電感計算單元。
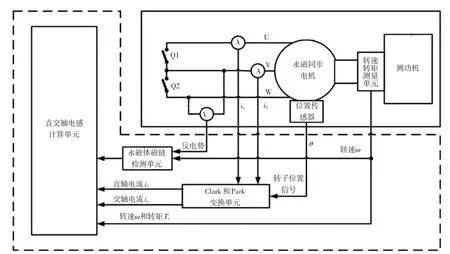
圖2 系統總體框架
測功機主要用于拖動永磁同步電機到設定轉速,并測量電機轉速和輸出轉矩,將信號輸入到軟件計算單元中。電流傳感器測量永磁同步電機任意兩相電流;電壓傳感器用于檢測電機的線反電勢。手動開關Q1和Q2用于改變電機三相開路和短路狀態,便于測量不同狀態下的參數。永磁體磁鏈檢測單元用于根據電機反電勢和轉速計算永磁體磁鏈;Clark和Park變換單元用于將電機靜止三相坐標系電流轉換為兩相旋轉坐標系下的直、交軸電流。
4 試驗驗證
被測電機的參數為:最高轉速5 000 r/min,峰值功率40 kW,最大力矩280N·m,極對數為4。
測試前對交流電流和電壓傳感器的零點進行標定;為避免溫度對測量產生影響,冷卻系統設定為恒溫25℃,且每組試驗均在熱平衡狀態下完成。首先測量永磁體磁鏈,斷開手動開關Q1和Q2,電機處于三相開路狀態,無負載,由測功機拖動永磁同步電機運轉到設定轉速1 000 r/min,無負載,測試時,電機三相呈開路狀態,采用功率分析儀對電機線反電勢測量3次,結果如表1所示。
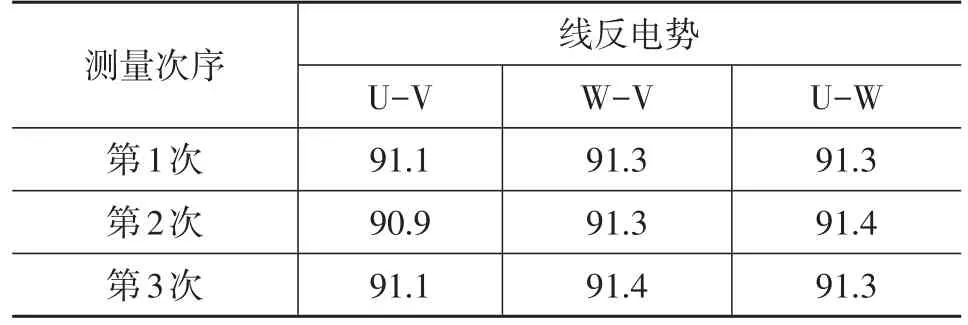
表1 電機線反電勢 V
對表1進行數據處理,得到線反電勢平均值為91.24 V,由式(7)計算可得Ψm=0.131 7Wb。
由測功機帶動永磁同步電機將轉速降為零,閉合手動開關Q1和Q2,電機處于三相短路狀態,測功機拖動電機以一定的間隔將轉速從0提高到3 000 r/min,測量永磁同步電機任意兩相電流和位置信號,輸入Clark和Park變換單元,輸出為永磁同步電機直、交軸電流;由轉速轉矩測量單元測量轉速和轉矩,并輸入到直、交軸電感參數計算單元,通過式(6)和式(12)計算出直軸和交軸電感參數。圖3所示為電機短路特性,永磁同步電機的短路力矩為與電機轉速相反的阻力矩,因此,電機正向旋轉的情況下其短路力矩為負值。從圖3可以看出,在較低速段,隨著轉速升高,短路力矩絕對值快速增加并在120 r/min達到峰值140 N·m,然后隨著轉速升高,其短路力矩絕對值緩慢減小,并且逐漸趨于零。
將采集的三相電流和位置信號經過坐標變換轉換成直、交軸電流后,作出直、交軸電流幅值與轉速的關系圖,如圖4所示。由圖4可見:交軸電流幅值呈現出與短路力矩相似的變化趨勢,隨著電機轉速升高,其絕對值先增加后減小,并且逐漸趨于零,原因在于交軸電流主要用于產生力矩;直軸電流絕對值隨著電機轉速的升高而逐漸升高,在轉速為2 000 r/min時趨于其最大值,在2 000~3 000 r/min轉速范圍內等間隔測試6個點,直軸電流變化相對其平均值(524.44 A)的占比僅為0.1%,說明直軸電流已經達到穩定狀態,該電流值即為永磁同步電機的特征電流,利用式(6)計算可得,直軸電感為0.025mH。
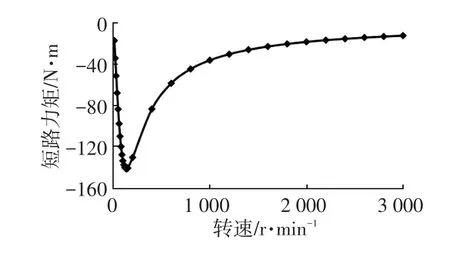
圖3 電機短路特性
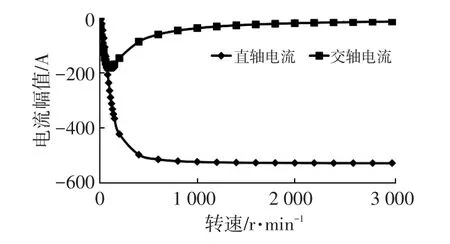
圖4 直交軸電流與轉速的關系
圖5所示為交軸電感仿真結果、實測值與交軸電流的關系。從整體上看,交軸電感在電流全域內變化相對較大,且隨著交軸電流增大而減小,這是因為電樞電流較小時,交軸磁路還未飽和,但隨著電樞電流的增加,交軸磁路逐漸飽和,相應地,交軸磁阻越來越大,交軸電感逐漸減小,因此,交軸電感與電機的磁飽和程度有關,電機飽和程度越高,交軸電感越小。以仿真曲線為標準作±5%誤差線,可以看到實測值均在該誤差帶內,實測值與理論值一致性較好。

圖5 交軸電感仿真結果、實測值與交軸電流的關系
5 結束語
本文論述了直、交軸電感對永磁同步電機設計、性能和應用方面的影響,分析了直、交軸電感常用測試方法的優、缺點,提出了基于三相短路的永磁同步電機電感測試方法,電感計算中用到的參數均可直接測量,且該方法充分考慮了磁飽和對直、交軸電感測量的影響。實際測試結果表明,直、交軸電感實測值均在仿真值±5%的誤差帶內,說明該方法實際應用與理論的一致性較好,能夠滿足應用要求。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00