四面體構架式可展天線型面劃分與程序化建模
2019-07-11 11:16:50許允斗郭路瑤姚建濤趙永生
中國機械工程 2019年12期
韓 博 許允斗,2 郭路瑤 張 碩 姚建濤,2 趙永生,2
1.燕山大學河北省并聯機器人與機電系統實驗室,秦皇島,0660042.燕山大學先進鍛壓成形技術與科學教育部重點實驗室,秦皇島,066004
0 引言
隨著航天事業的不斷發展,空間可展機構在深空探測、衛星通信以及軍事偵查等領域得到了廣泛應用[1]。空間可展機構在航天領域的一個重要應用是作為大口徑空間可展天線的支撐機構。大口徑空間可展天線多采用網狀反射面與桁架式支撐背架相結合的形式,具有收攏率高、質量小的特點,目前在軌運行的空間可展天線主要有四面體構架式可展天線、周邊桁架式可展天線,以及徑向肋式可展天線等[2-6]。
四面體構架式可展天線由若干個相似的可展單元組成,具有較大的折疊比和較高的結構剛度,其型面精度也易于控制,已經在國內外獲得了多次在軌應用,如中國的HJ-1-C衛星SAR天線和俄羅斯“聯盟號”飛船、“和平號”空間站[7-9]。四面體構架式可展天線主要包括支撐桁架和金屬反射網,金屬網反射面固定于支撐機構上,通過支撐機構將其張成若干拼合的小平面[10]。小平面主要是三角形、四邊形和六邊形的,而3個節點可以確定一個平面單元,且三角形網格的結構具有較好的穩定性,可以提高結構剛度以及承受非對稱載荷的能力,因此三角形網格在可展天線中應用較多[11]。
已有學者對天線的型面劃分方式進行了深入研究,形成了不同的型面劃分方法。AGRAWAL等[12]以平面單元逼近拋物面為目標,研究了天線反射面型面精度與平面單元尺寸之間的關系,給出了旋轉拋物面天線型面精度與三角形平面單元邊長之間的解析表達式。張京街等[13]將拋物面與三角形平面的關系轉換為數學問題,通過牛頓迭代法求解方程組,最終得到三角形節點的空間位置。李團結等[14]針對環形桁架式索網天線的索網型面劃分,提出了弧長劃分和垂直投影劃分相結合的方法。YANG等[15]根據穹頂結構中常用的三向網格法,提出了一種劃分拋物面索網的改進三向網格方法,并給出了口徑面上正三角形單元邊長與實際反射面和期望反射面之間系統偏差的解析表達式。DENG等[16]則以環形桁架為依托,提出了一種適用于環形桁架可展天線的測地線網格的方法。田大可等[17]以六邊形可展模塊為分析對象,提出了將支撐桁架模塊分為等尺寸、不等尺寸兩種類型的六邊形型面劃分方法。以上方法均可實現拋物面天線型面的網格劃分,但是劃分過程均較為復雜。
在機構的程序化建模方面,陳雨等[18]研究了變速箱的參數化設計問題,基于VC編程語言對Pro/E 5.0軟件進行了二次開發,開發了相應的工具包來方便快捷地設計出需要的變速箱;郭旭偉等[19]研究了虛擬環境下Stewart型并聯機床的參數化建模問題,實現了工作空間計算的參數化和三維仿真;俞高紅等[20]基于MATLAB和VB.NET混合編程技術,研究了齒輪分插機構的三維參數化設計問題;趙振宙等[21]、劉博林等[22]分別研究了風力渦流發生器和一種沖壓驅動橋殼的參數化建模方法;葛曉波等[23]基于框架模型,提出了一種通過腳本對產品建模規則進行描述的語義模型,以及一種產品整機參數化建模的方法;關富玲等[24]研究了可展天線結構設計的程序實現問題;夏鴻建等[25]提出了一種工程約束推理求解和模型元素更新機制相結合的參數化方法。雖然科研人員對不同機構的程序化建模方法進行了探索,但是對大口徑空間可展天線的程序化設計建模的研究較少。四面體構架式可展天線由多個四面體可展單元連接組成,不同尺寸的構件較多,手工建模較為復雜,亟需研究其程序化建模方法。
本文針對四面體構架式可展天線進行研究,分析了其機構構型及機構單元組網方式,提取出了基本組合單元機構,提出了一種較為簡單的包含中心節點的六邊形型面劃分方法。基于MATLAB和SOLIDWORKS提出了一種程序化建模的方法,采用VBA編程語言對SOLIDWORKS進行二次開發,編制了插件,并通過兩個實例驗證了所提出的型面劃分方法以及程序化建模方法的正確性。
1 四面體構架式可展天線機構構型
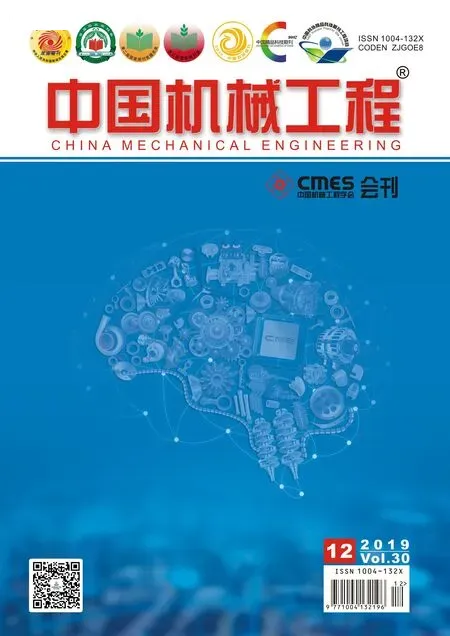
四面體構架式可展天線整體如圖1所示,其支撐機構是由多個四面體可展機構單元,通過共用節點花盤或連桿組合而成的。支撐機構的型面包括反射面和支撐面。支撐面用來提升整體機構的剛度,整體天線依靠支撐機構反射面(多為拋物面)上鋪設的金屬反射網進行信號的接收與傳遞。
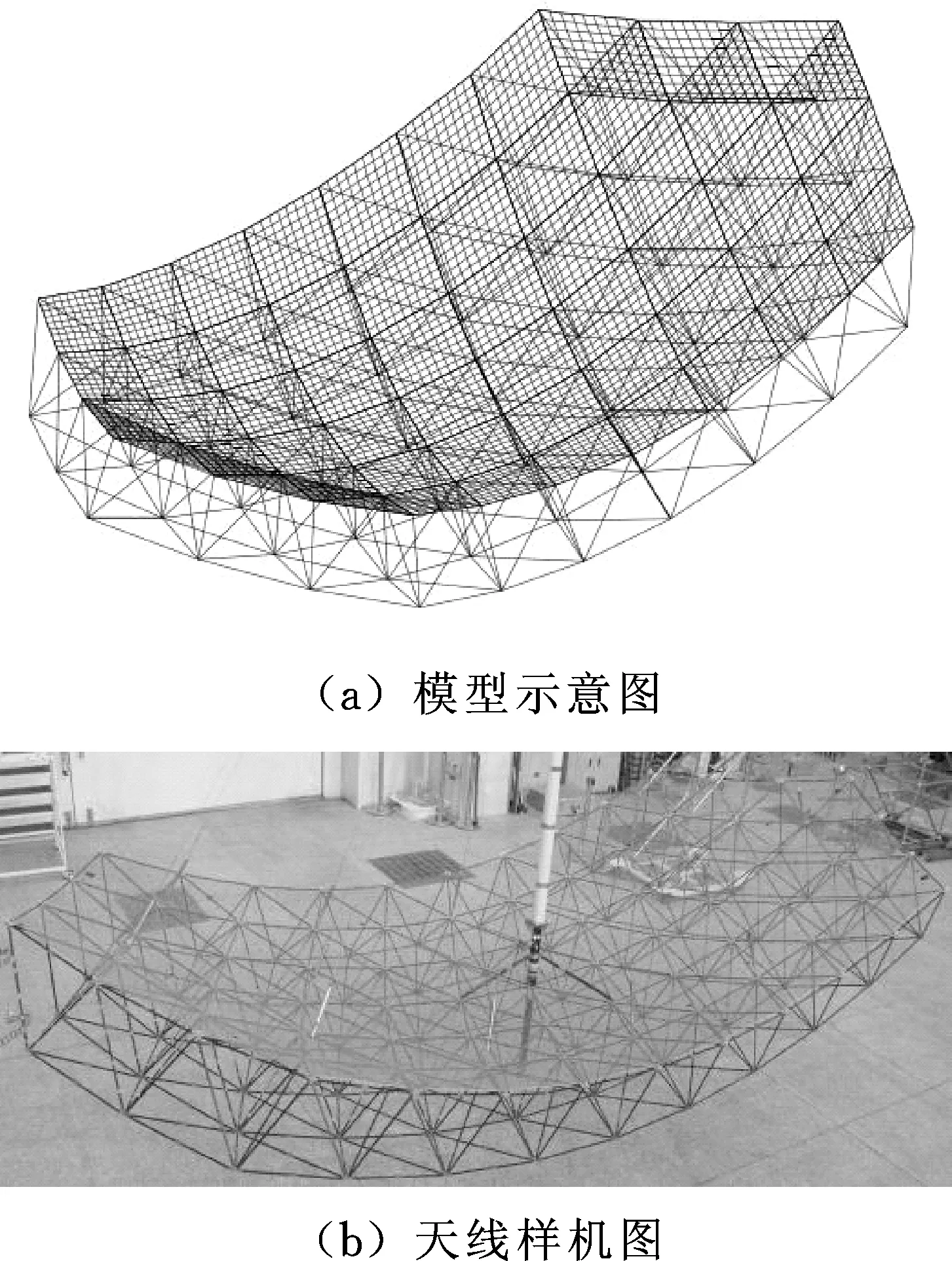
圖1 四面體構架式可展天線Fig.1 Tetrahedral truss deployable antenna
根據拋物面位置的不同,四面體構架式可展天線可分為正饋式和偏饋式,如圖2所示,其主要差別如下:正饋形式天線的圓柱切面的旋轉軸線與拋物面的旋轉軸線重合,偏饋形式天線的圓柱切面的旋轉軸線與拋物面的旋轉軸線有一定偏距。拋物面的外輪廓為橢球面,正饋式和偏饋式的四面體構架式可展天線在結構上并無較大不同,僅在天線型面形狀上有所不同。
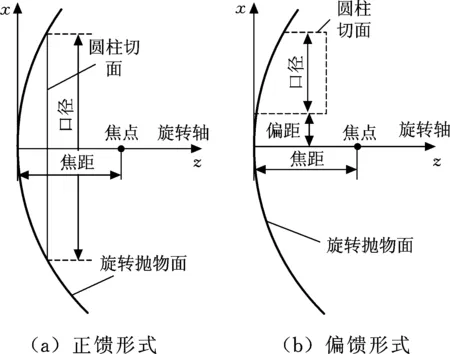
圖2 四面體構架式可展天線分類Fig.2 Classification of tetrahedral truss deployable antennas
如圖3所示,四面體可展機構單元包括節點O、A、B、C及連接節點的6根桿件,其中,底部節點間的連接桿件稱為同步桿,底部節點與頂部節點之間的連接桿件稱為腹桿。四面體可展機構單元通過節點間連接桿件的折疊運動實現機構的收展。
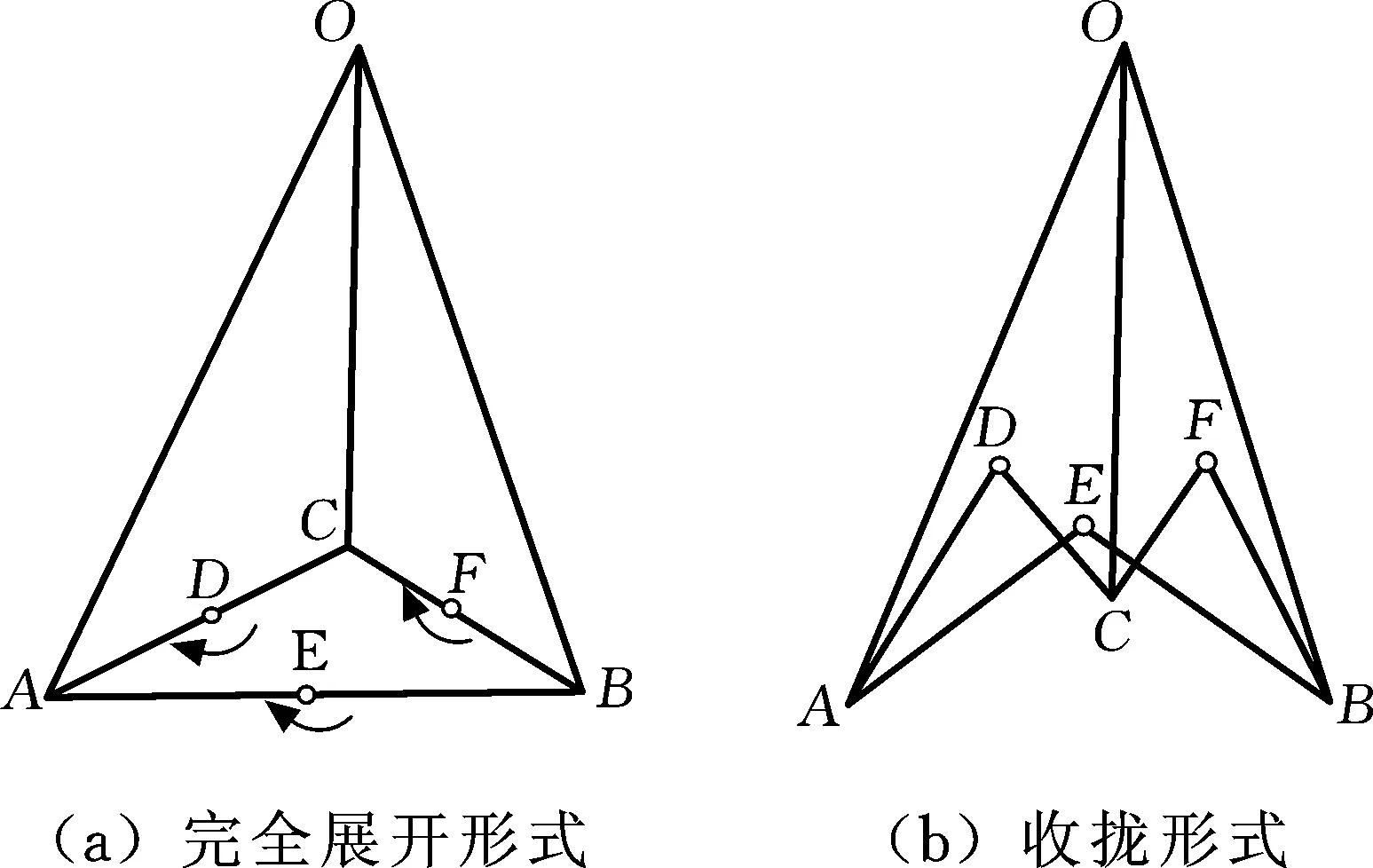
圖3 四面體可展機構單元Fig.3 Tetrahedral deployable mechanism unit
四面體可展機構單元組網時,通過反射面節點花盤所在的三角形平面組合來逼近旋轉拋物面,為減輕機構復雜程度,同時減小天線整體質量,四面體可展機構單元在可展天線拋物面上采用間隔式分布,如圖4a所示。為了增加整體桁架機構的剛度,在四面體可展機構單元的頂部節點花盤之間需要添加相應的連接支鏈,如圖4b所示。

圖4 四面體可展機構單元組Fig.4 Group of tetrahedral deployable mechanisms units
由圖4b可以發現,在四面體可展機構單元的頂部節點花盤之間添加相應的連接支鏈后,頂花盤連接支鏈也組合成了多個三角形網格單元,且頂部的3個頂花盤連接形成的三角形平面也為間隔式分布。對于有腹桿連接的單元,3個四面體可展機構單元的頂花盤(位于支撐面上)和3個單元共用的底花盤(位于反射面上)共同組成了一個倒置的四面體可展機構單元。對組網后的四面體構架式可展天線機構進行模塊劃分,可以得到其四面體可展機構的基本組合單元,如圖5所示,整個天線機構由多個基本組合單元連接組成。
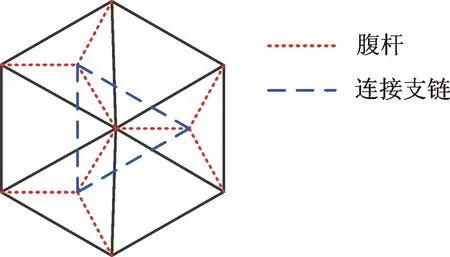
圖5 基本組合單元機構Fig.5 Basic combination units mechanism
2 四面體構架式可展天線型面劃分
通過天線反射面的型面劃分可以確定實際反射面型面中各節點的合理位置,是索網天線結構設計的首要任務。現有的天線型面劃分方法適用于包括四面體可展機構單元的各種型面的組網方式,但計算過程較為復雜。對于四面體構架式可展天線的三角形網格型面,由于位于型面中心位置處的基本組合單元機構具有旋轉對稱性,因此連接反射面上7個花盤的中心將形成正六棱錐,如圖6所示,其中,QA=QB=QC=QD=QE=QF,對于天線型面上其他位置的基本組合單元,則具有棱邊兩兩相等的特點。基于四面體構架式可展天線型面的中心六邊形棱邊均相等,其他位置六邊形棱邊兩兩相等這一特征,這里提出一種較為簡單的包含中心節點的六邊形型面劃分方法。

圖6 六棱錐示意圖Fig.6 Schematic diagram of hexagonal pyramid
采用包含中心節點的六邊形型面劃分方法對四面體構架式可展天線機構進行型面劃分時,首先得到拋物面上六邊形模塊的拓撲規律,在天線的口徑面上劃分出正六邊形的組合,如圖7所示;然后繪制出每個六邊形單元的中心,各個六邊形單元的中心相連后,呈現出三角形分布的規律,設定六邊形邊長為lA,三角形邊長為lB。
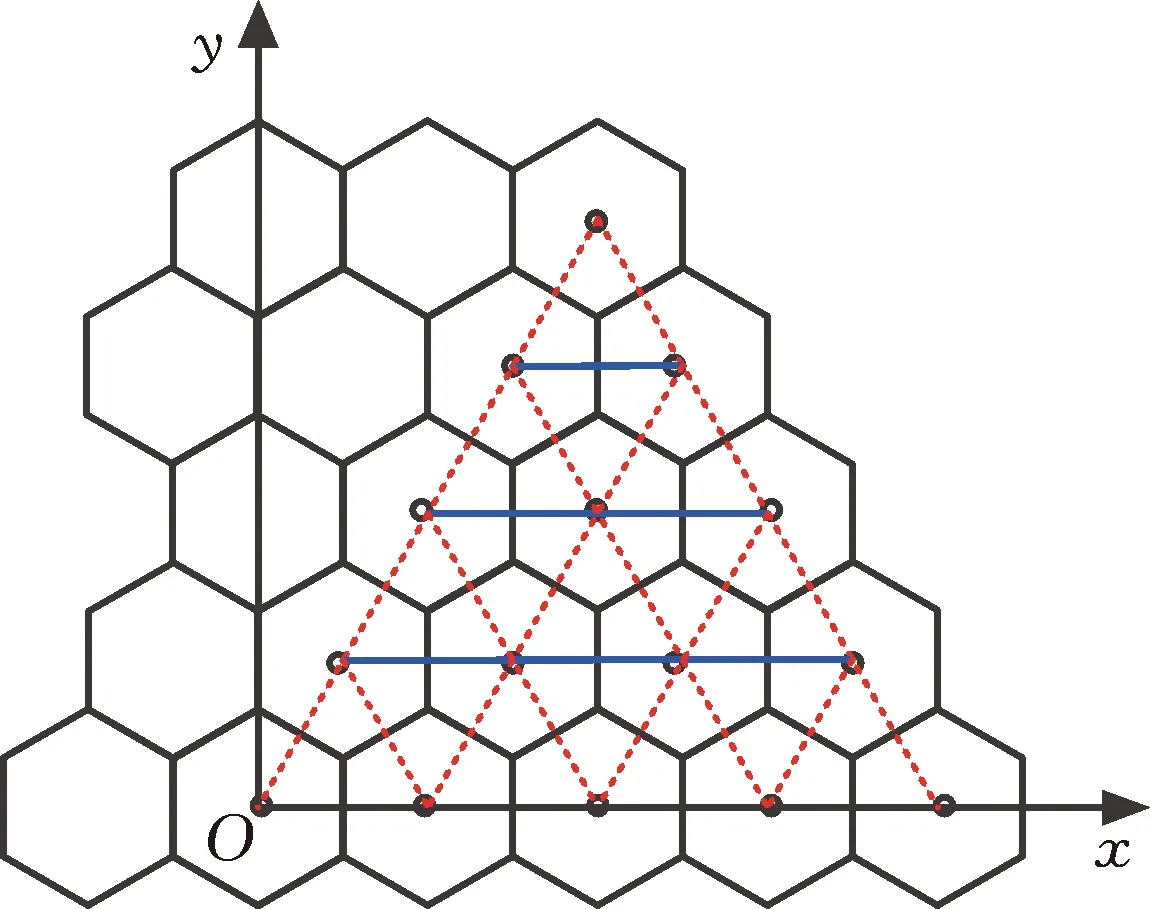
圖7 天線口徑面上的六邊形分布規律Fig.7 Hexagon distribution on antenna aperture surface
包含中心節點的六邊形型面劃分方法的具體步驟如下。
(1)給定型面誤差δrms,按照下式[13]:
(1)
式中,f為天線型面焦距。

(2)依照口徑面的直徑D和三角形邊長得到細分數N,N為大于D/lB的最小整數,進而通過N進一步獲得圓整后的三角形邊長l′B。
(3)將口徑面的內接正六邊形劃分為多個邊長為l′B的正三角形,三角形頂點的位置為對應的正六邊形的中心位置,利用坐標變換得到各個正六邊形的節點坐標。
(4)將口徑面上的正六邊形沿拋物面的旋轉軸方向映射至旋轉拋物面。
(5)根據拋物面上的六邊形單元確定基本模塊中心節點的位置,進而利用坐標變換得到所有節點的坐標,從而完成整個拋物面的型面劃分。
對于正六邊形,依據旋轉變換矩陣很容易得到其中心節點和6個頂點之間的變換關系,如圖8所示,設定六邊形的邊長為l′A,則依據坐標變換很容易得到節點P1~P6的坐標。
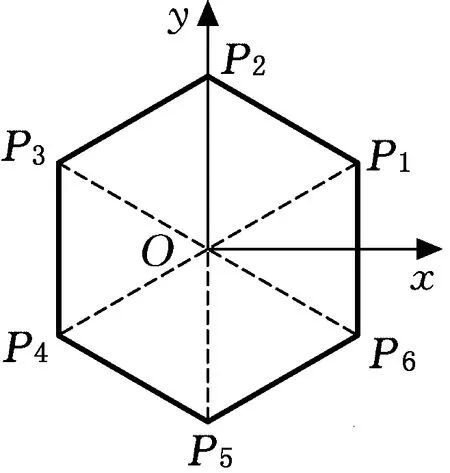
圖8 六邊形頂點的分布Fig.8 Distribution of hexagon vertices
依據幾何關系首先得到點P1的坐標:
p1=(l′Acos30°,l′Asin30°,0)
(2)
依據坐標變換得到其余點的坐標:
pi+1=l′A(cos(φi+30°),sin(φi-30°),0)
φi=i×60°i=1,2,…,5
(3)
得到平面上六邊形單元的分布規律之后,由于給定拋物面上的六邊形是平面六邊形單元沿旋轉軸投影得到的,因而按照拋物面的方程可以容易得到拋物面上對應點的坐標,如圖9所示。
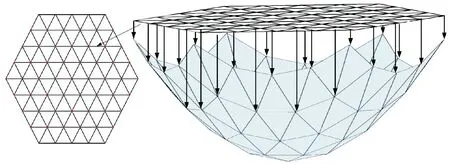
圖9 口徑面網格單元向拋物面投影Fig.9 Projection of mesh units of aperture surface to paraboloid
平面上的任意一點K的坐標為(x,y,0),假設拋物面方程為
x2+y2=nfz
(4)
式中,n為正整數。
點K向拋物面投影映射后,對應于拋物面上的點K1,其坐標為(x1,y1,z1),兩點的坐標滿足如下關系:
(5)
天線口徑面上的六邊形中心點Q向拋物面映射后的坐標可通過如下方式獲得。設Q在拋物面上對應節點Q1的坐標為(xQ1,yQ1,zQ1),中心點Q1所在基本組合單元的頂點在拋物面上的投影點P1j的坐標為(xP1,j,yP1,j,zP1,j),j=1,2,…,6,則各坐標量滿足如下的關系:
(6)
k=1,3,5
由于拋物面上的6個頂點P1j同屬于一個基本組合單元,所以它們在天線口徑面上的投影為正六邊形,因而其坐標值均滿足式(3)。
基于以上分析得到了滿足映射規律的拋物面六邊形劃分方法,以六邊形單元為基本組合單元,利用其中心點及各個頂點的分布規律進行坐標運算,得到各個節點坐標,連接各個節點可以得到三角形網格劃分后的天線型面。這種天線網格劃分方法過程簡單直觀,且是以中心對稱六棱錐為基礎進行網格劃分的,劃分后的三角形網格的桿件長度一致性較好,整體網格質量較高。
3 四面體構架式可展天線程序化建模
四面體構架式可展天線機構所含四面體單元較多,且各個四面體單元機構連接組合后需要使天線反射面為拋物面,這會導致不同四面體單元機構中的構件尺寸不同,設計者手工建模的工作量較大、設計周期較長、修改較為繁瑣,應用程序化設計可以大大縮短設計者的建模時間,提升工作效率,同時模型易于修改,可有效提高設計質量。
3.1 傳統手動建模關鍵步驟
四面體構架式可展天線機構設計步驟較為復雜,手動建模的關鍵步驟(圖10)如下:
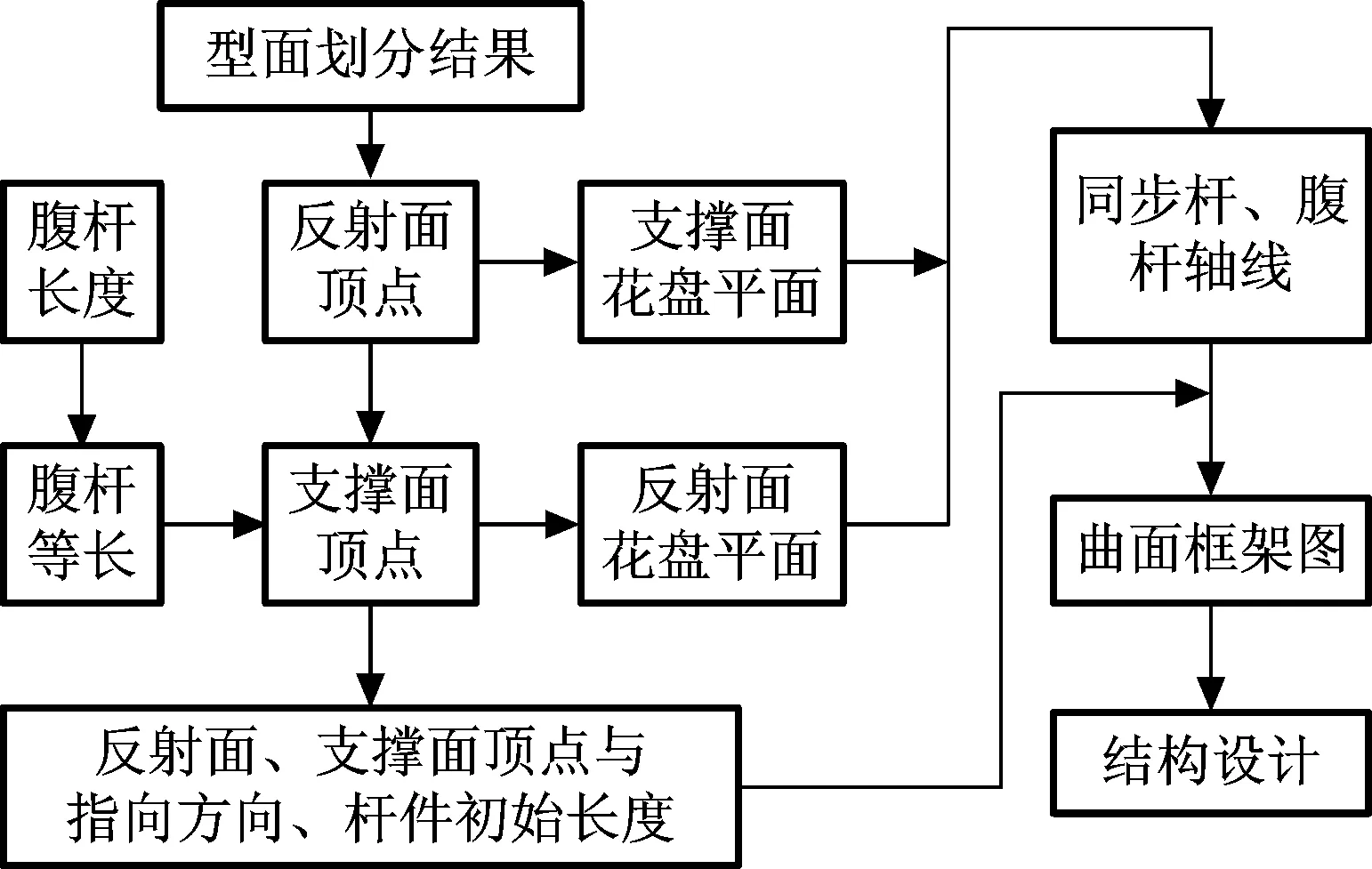
圖10 建模關鍵步驟Fig.10 Key steps of modeling
(1)設定天線口徑與拋物面型面曲率、焦距等關鍵參數,采用型面網格劃分方法進行型面劃分,得到天線反射面上各個節點的空間位置,在建模軟件中輸入坐標繪制反射面上的各個節點;
(2)設定四面體可展機構單元腹桿的桿長,利用反射面各三角形網格節點,計算得出各個支撐面節點的空間位置,在建模軟件中輸入坐標繪制支撐面上的各個節點;
(3)連接四面體構架式可展天線反射面及支撐面的各個節點,形成整體線框模型;
(5)在確定的位形下,對整體模型中的節點花盤、同步桿及腹桿進行結構設計。
在四面體構架式可展天線機構的設計階段,需要對整體機構進行運動仿真,并對桿件及節點進行尺度優化,最后進行結構設計。運動仿真及尺度優化均通過天線的整體線框模型來實現,因此,這里主要研究四面體構架式可展天線機構整體線框模型的程序化建模。
3.2 程序化建模
程序化建模主要步驟與手動建模步驟相同,利用MATLAB的計算功能和SOLIDWORKS的繪圖功能進行程序化建模,具體建模方法及過程如下。
3.2.1MATLAB軟件計算與存儲
設定四面體構架式可展天線口徑與拋物面型面曲率、焦距等關鍵參數,采用包含中心節點的六邊形型面劃分方法,對四面體構架式可展天線進行型面劃分,計算得到四面體構架式可展天線機構上各個節點坐標,用MATLAB編寫的可視化操作界面如圖11所示。
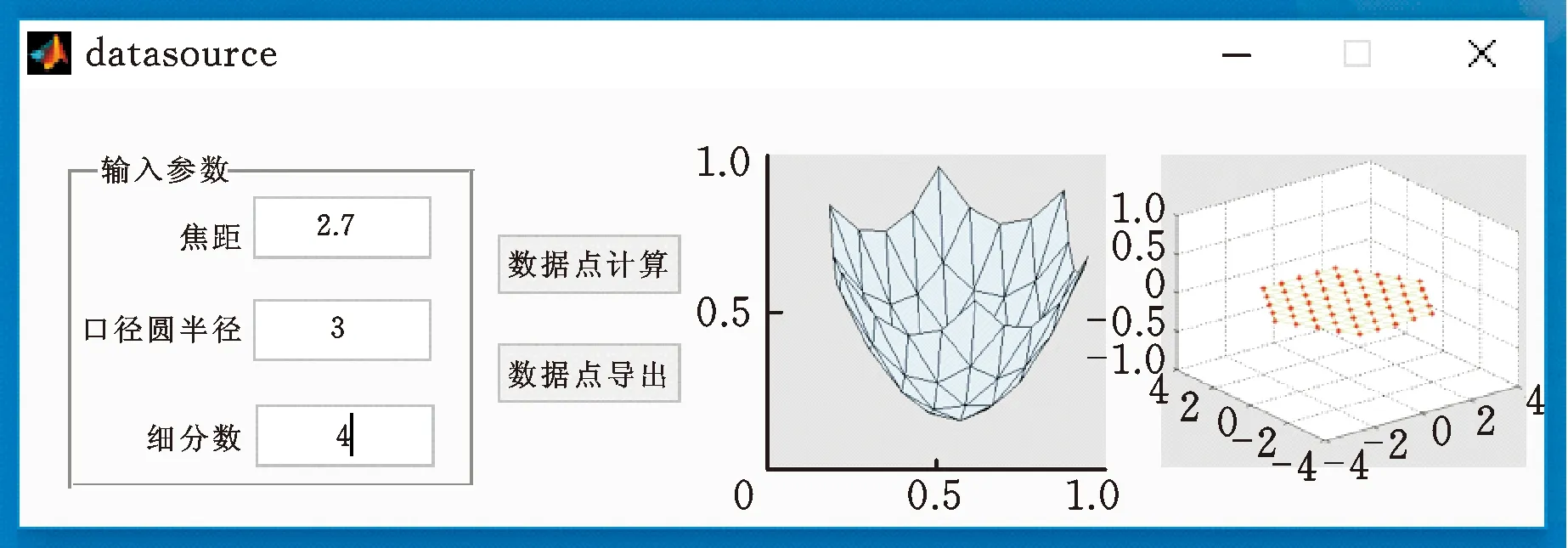
圖11 可視化操作界面Fig.11 Visual operating interface
利用天線型面劃分方法對天線型面進行劃分,編制的MATLAB計算程序的主體程序代碼較多,主要接口及賦值程序如下:
function pushbutton1_Callback (hObject,eventdata,handles)
說起酒,許多文人士大夫都和它結下了不解之緣。這其中就有浪漫主義詩人屈原“蕙肴烝兮蘭藉,奠桂酒兮椒漿”,唐朝詩仙李白“人生得意須盡歡,莫使金樽空對月”,田園詩人陶淵明“歡言酌春酒,摘我園中疏”……但是,酒到了宋朝遇見蘇東坡,擦出了不一樣的火花。蘇軾一生愛酒,但與許多文人不同,他愛酒卻不溺酒。他雖一生仕途跌巖起伏,但不論順境還是逆境,都淡泊從容。閑暇時親自釀酒,率真豪放地約二三好友赴宴,飲酒賦詩。
shujudianlaiyuan(str2num(f),str2num(r1),str2num(N),str2num(L))
計算完成后,采用MATLAB中的xlswrite函數指令,將計算所得的各個節點坐標保存在Excel文件,供SOLIDWORKS調用,部分程序如下:
sheet=1;
xlswrite(filename,t,sheet);
采用以上命令即可將各個節點坐標存入到D盤目錄下名為xkuang的Excel文件的表單1,其他數據文件亦可以按照此方法存入同一個Excel文件的不同表單。
3.2.2SOLIDWORKS軟件程序化建模
在SOLIDWORKS中進行程序化建模時,需要針對SOLIDWORKS進行二次開發,通過SOLIDWORKS API接口,編制能夠嵌入SOLIDWORKS的插件,通過調用插件進行程序化繪圖。設計變量與編程結合的程序化建模方案如圖12所示。
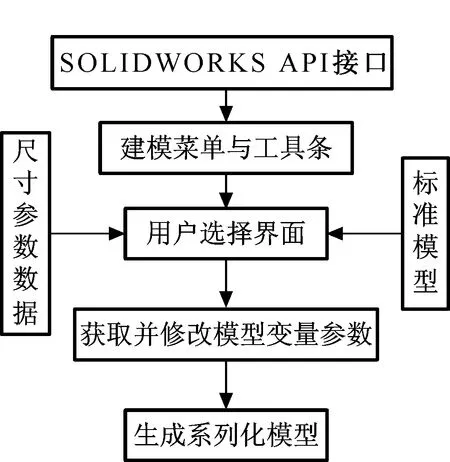
圖12 程序化建模方案圖Fig.12 Schematic diagram of programmatic modeling
具體開發步驟如下:
(1)通過SOLIDWORKS軟件“工具”選項中“宏”模塊中的“宏錄制”命令,提取出手工繪圖所用的操作指令的程序源代碼,程序采用SOLIDWORKS自帶的編程語言VBA(與語言VB兼容);
(2)在SOLIDWORKS中,利用“新建宏”命令,建立能在SOLIDWORKS中打開的插件;
(3)在新建的插件中,采用VBA編程設計可視化界面;
(4)在新建的插件中,采用VBA調用MATLAB生成的數據文件表格,利用提取的繪圖指令代碼編寫繪圖程序;
(5)設定花盤尺寸,在新建的插件中,采用VBA通過每個四面體可展機構單元位于反射面上的3個節點建立基準面,并通過基準面的平移,建立支撐面花盤基準面;
(6)在新建的插件中,采用VBA在新建的基準面上編程繪制花盤和運動副的軸線,完成整體繪制。
典型指令操作程序VBA代碼如下:
xlsApp.Workbooks.Open ("D: ianxian.xlsx");
%導入Excel表格數據命令
xlsApp.Application.ActiveWorkbook.Sheets("Sheet1").Range("A" & CStr(i)).Value
%給點賦值命令
Part.SketchManager.CreatePoint(a,b,c);
%生成坐標點命令
Part.SketchManager.CreateLine(Ax,Ay,Az,Bx,By,Bz);
%利用兩點繪制直線命令
SetmyRefPlane=Part.FeatureManager.InsertRefPlane(1,0,4,0,0,0);
%建立基準面命令
4 型面劃分與程序化建模驗證
4.1 包含中心節點的六邊形型面劃分方法驗證
采用包含中心節點的六邊形型面劃分方法對四面體構架式可展天線口徑面進行網格劃分,使用SOLIDWORKS繪制旋轉拋物面,設定天線反射面截面拋物線的表達式為x2=8z,取天線口徑面直徑為4 m,六邊形細分數N=4,按照步驟進行劃分后,得到的結果如圖13所示。使用包含中心節點的六邊形劃分方法對四面體構架式可展天線進行型面劃分的過程較普通拋物面天線型面劃分方法更為簡潔直觀,劃分后的可展天線型面網格也較為均勻,天線反射面型面質量較好。
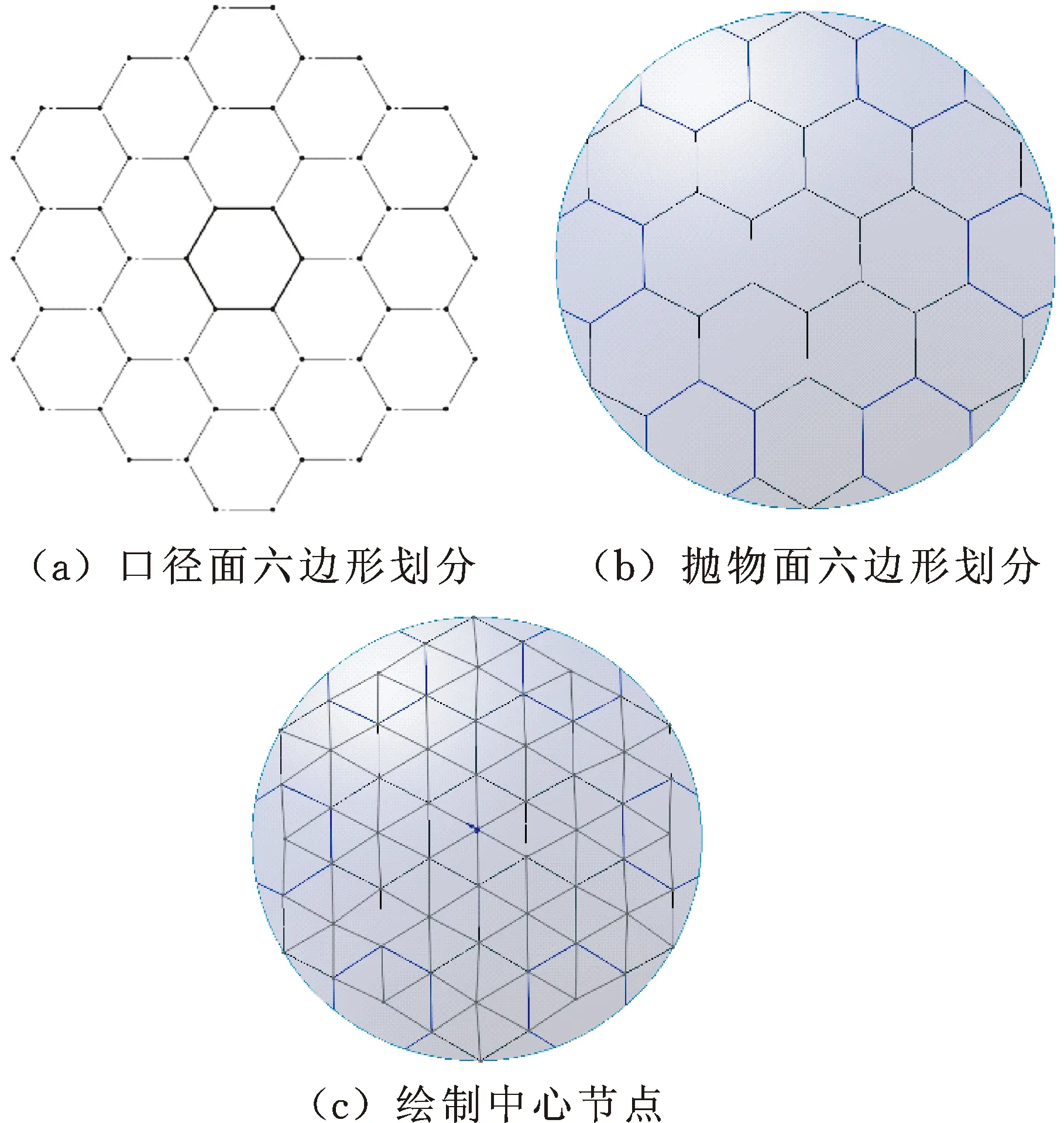
圖13 網格劃分后的型面Fig.13 Profile after the mesh division
4.2 四面體構架式可展天線程序化建模驗證
以口徑6 m、焦距2.7 m、細分數為4的對稱拋物面為例,采用提出的六邊形型面劃分方法,用MATLAB和SOLIDWORKS進行程序化建模,天線反射面型面網格劃分結果如圖14所示。
網格劃分完成后,將節點坐標數據存入Excel文檔,利用SOLIDWORKS進行程序化建模,其建模過程如圖15所示。
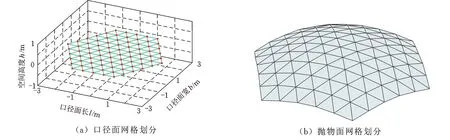
圖14 四面體可展天線型面網格劃分Fig.14 Mesh division of tetrahedral deployable antenna surface
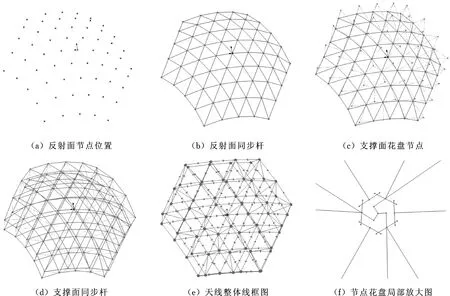
圖15 程序化建模關鍵步驟圖Fig.15 Diagrams of the key steps of procedural modeling
程序化建模的耗時為5 min,人工建模時間為5~7 d,可見對四面體構架式可展天線采用程序化建模可以大大縮短建模時間,提升工作效率。同時,建模程序可以多次使用,天線模型易于修改(只需修改程序參數即可);人工建模時,若要修改天線參數,則需要重新從頭開始繪制模型,工作量較大。
5 結論
(1)對四面體構架式可展天線機構構型及組網方式進行了分析,提取出一種由四面體可展機構單元組成的基本組合單元。整個可展天線機構可由多個基本組合單元組合而成。
(2)針對四面體構架式可展天線機構的反射面型面劃分問題,根據其中心位置處基本組合單元具有旋轉對稱性的特點,提出一種包含中心節點的六邊形型面劃分方法,詳細列出了利用該方法進行可展天線型面網格劃分的步驟。
(3)針對此類可展天線機構建模較為復雜的問題,基于MATLAB和SOLIDWORKS,提出了一種程序化建模方法,并設計了可視化操作界面。
(4)采用2個可展天線機構實例,驗證了所提出的型面劃分方法與程序化建模方法的正確性,結果表明,采用此方法劃分型面的過程較為簡單且型面網格質量較好。對天線機構進行程序化建模方便快捷,可大大提升建模工作效率,且建模參數易于修改,通用性較好。