一種基于線陣相機(jī)的報靶系統(tǒng)解算模型研究
2019-07-15 07:03:00陳新元張國豪
裝備制造技術(shù) 2019年5期
陳新元,張國豪,羅 齊
(1.空軍勤務(wù)學(xué)院航空彈藥保障系,江蘇 徐州 221000;2.94303部隊,山東 濰坊261000;3.95178部隊,廣西 南寧530028)
0 引言
各類武器射擊中,實(shí)際應(yīng)用的彈著點(diǎn)定位方法有光電探測定位法,聲電探測定位法,基于圖像處理的定位法等[1-3]。光電探測定位法是以光電轉(zhuǎn)換技術(shù)為基礎(chǔ),探測飛行彈丸到達(dá)空間指定位置時刻的方法,通過光電元器件探測到變化的光信號,轉(zhuǎn)換為電信號,然后再傳遞給信號處理系統(tǒng),經(jīng)過計算處理,即可得出彈著點(diǎn)的位置,實(shí)現(xiàn)對彈丸彈著點(diǎn)的探測[4]。聲電探測定位法是各聲音傳感器以一定形式安裝在同一面內(nèi),近似可認(rèn)為激波在靶平面內(nèi)是以恒定速度傳播,當(dāng)彈丸產(chǎn)生的脫體激波傳播到聲音傳感器時,電信號會產(chǎn)生,根據(jù)傳感器的位置和獲取到的各傳感器的信號,通過構(gòu)建空間模型,即可解算出彈著點(diǎn)的位置。基于圖像處理技術(shù)的彈著點(diǎn)定位方法是一種集現(xiàn)代計算機(jī)技術(shù)、網(wǎng)絡(luò)傳輸和數(shù)據(jù)庫設(shè)計技術(shù)、圖像采集和處理技術(shù)于一體的系統(tǒng)集成方案。利用圖像采集系統(tǒng)對靶面進(jìn)行圖像采集,利用閥值規(guī)則對圖像分割,靶面中某點(diǎn)具有最大的灰度值,即唯一確定為靶心,當(dāng)靶面上有彈孔時,其灰度值不同于其他地方的灰度值,從而可以被準(zhǔn)確得判別出來[5,6]。
當(dāng)前幾種對高速小目標(biāo)探測的方法,通過運(yùn)用不同的原理、采用不同的方案,可實(shí)現(xiàn)不同情況下彈丸的探測定位,每種方法都有一定的優(yōu)點(diǎn)。但是,由于機(jī)載火炮對地打靶訓(xùn)練發(fā)射平臺機(jī)動性較大、彈丸散布面積較大、彈丸速度較高和發(fā)射方式較多等,利用上述幾種方法對彈著點(diǎn)的探測比較困難、局限性較大,因此,亟需一種新的探測報靶方案。
鑒于此,基于線陣相機(jī)工作原理,本文提出一種通過相機(jī)拍攝、像素采集、模型建立以及空間解析計算的方法,來實(shí)現(xiàn)機(jī)載火炮對地攻擊訓(xùn)練彈著點(diǎn)的精確報靶。
1 基于線陣相機(jī)的報靶系統(tǒng)解算模型
在進(jìn)行機(jī)載火炮對地攻擊訓(xùn)練時,靶場上要事先設(shè)置靶環(huán)供飛行員瞄準(zhǔn)射擊。該解算模型為,在距離靶環(huán)一定位置布置四臺性能相同的線陣相機(jī),建立靶場坐標(biāo)系和相機(jī)坐標(biāo)系。在進(jìn)行打靶訓(xùn)練時,用線陣相機(jī)拍攝彈丸彈道,然后通過像素采集和空間解析計算的方法解算出理論彈著點(diǎn)。
1.1 坐標(biāo)系的建立
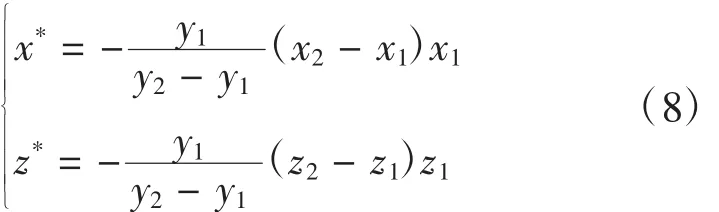
以靶心為坐標(biāo)原點(diǎn)o,過o點(diǎn)中心彈道在靶平面(可以是水平面或一定坡度的斜平面)的投影為ox軸,且與中心攻擊方向一致為正;oy軸過o點(diǎn)垂直于靶平面,方向朝上;oz軸垂直于oxy平面,方向由右手法則確定,見圖1。在離靶心一定距離的位置上布置四臺性能相同的線陣相機(jī)。相機(jī)1、2的位置點(diǎn)對稱分布在中心彈道在水平面投影的兩邊。相機(jī)1、2組成的相機(jī)坐標(biāo)系相對地面坐標(biāo)系的偏航角為y12=0°,俯仰角為 J12,相機(jī) 1、2 分別按照順時針、逆時針轉(zhuǎn)動角度g1、g2。由于線陣相機(jī)的探測區(qū)域?yàn)橥ㄟ^相機(jī)光軸線的一個平面,所以相機(jī)1的探測面和相機(jī)2的探測面重合。其中a為中心彈道入射角,當(dāng)俯仰角J12=90°時,探測面為鉛垂面。當(dāng)俯仰角J12=90°-a時,在一定探測距離下,探測范圍最大,如圖1所示。
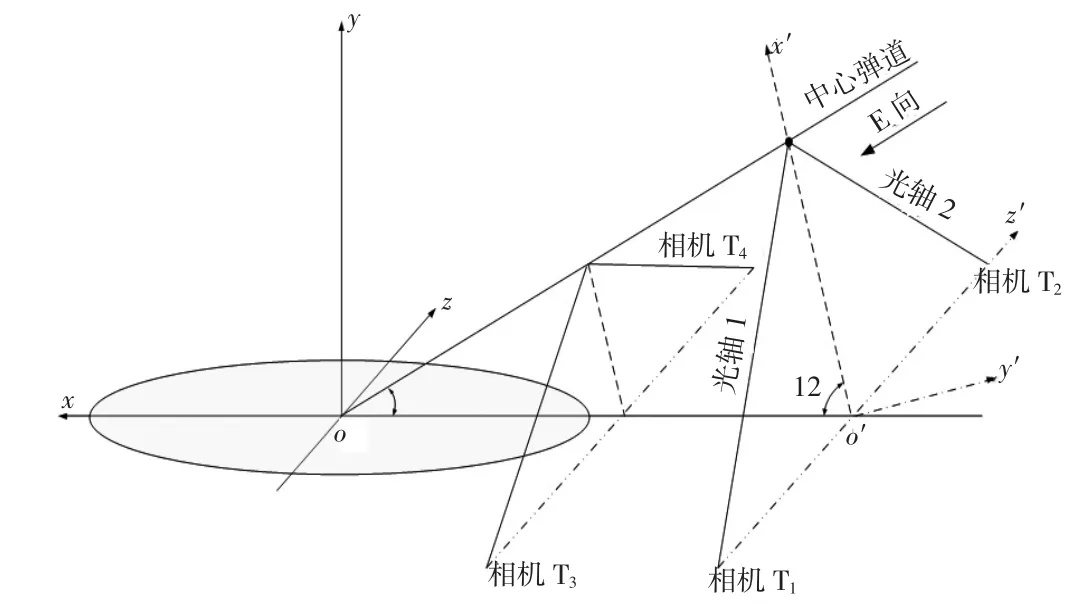
圖1 靶場坐標(biāo)系示意圖
1.2 相機(jī)坐標(biāo)系與靶場坐標(biāo)系的轉(zhuǎn)換
圖2 為相機(jī)坐標(biāo)系角度關(guān)系示意圖。相機(jī)T12坐標(biāo)系 o′x′y′z′:設(shè)相機(jī) T1、T2的探測面共面,相機(jī) T1、T2位置中心為坐標(biāo)原點(diǎn) o′,過原點(diǎn) o′相機(jī) T1、T2位置的連線 o′z′為軸,在共面內(nèi)垂直于 o′z′軸的為 o′x′軸,o′y′軸由右手法則決定。設(shè)相機(jī)T12的中心在oxyz坐標(biāo)系中坐標(biāo)為o′(x*12,y*12,z*12)。相機(jī)坐標(biāo)系o′x′y′z′相對坐標(biāo)系oxyz的姿態(tài)關(guān)系:
俯仰角 J12:o′x′軸與靶平面 oxz 的夾角,o′x′軸從下向上穿過靶平面為正,反之為負(fù);
偏航角y12:o′x′軸在靶平面 oxyz上的投影與 ox軸的夾角,由ox軸逆時針方向轉(zhuǎn)至投影線方向時為正,反之為負(fù);
滾轉(zhuǎn)角 g12:o′x′軸與包含 o′y′軸的垂直平面的夾角,沿o′y′軸方向看,相機(jī)由垂直平面右轉(zhuǎn)為正,反之為負(fù)。
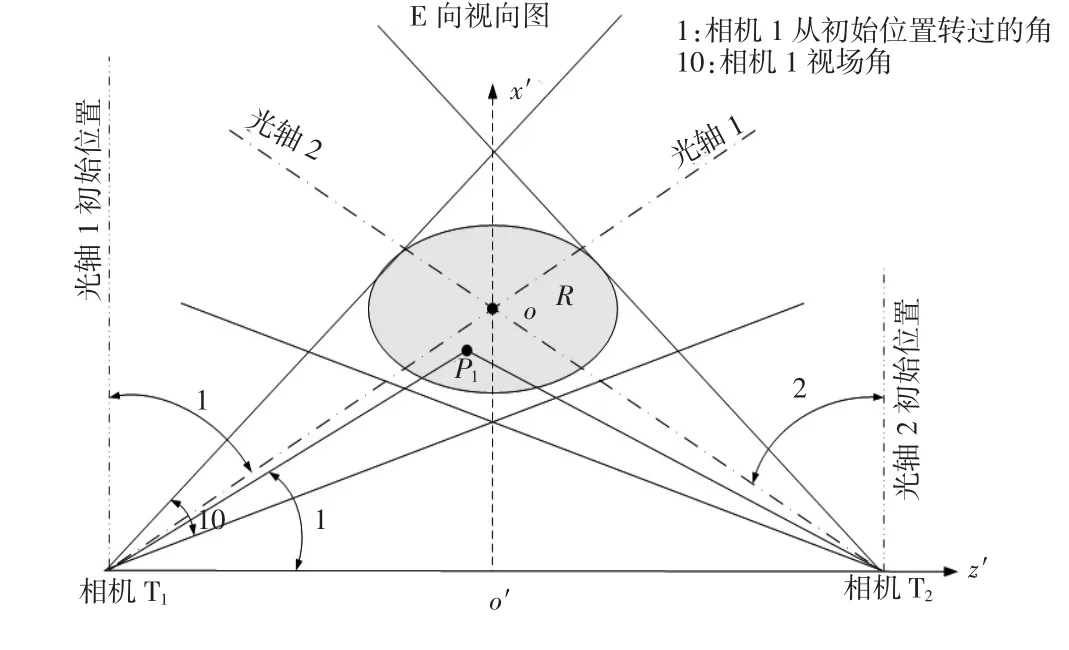
圖2 相機(jī)坐標(biāo)系角度關(guān)系示意圖
如圖3為相機(jī)內(nèi)部結(jié)構(gòu)簡圖,AB為相機(jī)內(nèi)部成像面,C為相機(jī)鏡頭中心,虛線CD為相機(jī)光軸,光線CA,CB通過鏡頭中心,P*為探測點(diǎn)P1在相機(jī)成像面上的像。

圖3 相機(jī)內(nèi)部結(jié)構(gòu)簡圖
鑒于位置量對彈丸定位不是很敏感,將位置量作為常量,故在相機(jī) T12坐標(biāo)系 o′x′y′z′的探測面 o′x′y′上,彈道與探測面的交點(diǎn)P1(即探測點(diǎn))在相機(jī)T1中形成的射線方向傾角a1為:
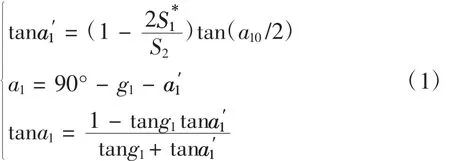
其中,S*為探測面上的彈著點(diǎn)在相機(jī)1中的像素大小,S1為相機(jī)T1的分辨率,a10為相機(jī)1的視場角,為光線 P1P*與光軸的夾角。
則射線 T1P1在相機(jī) T12坐標(biāo)系 o′x′y′z′中的方程為:

其中,T12為相機(jī)T1、相機(jī)T2之間的間距。
同理,可得射線 T2P1在相機(jī) T12標(biāo)系 o′x′y′z′中的方程為:

解方程(2)與(3),可得探測點(diǎn) P1在坐標(biāo)系o′x′y′z′中的坐標(biāo)為:
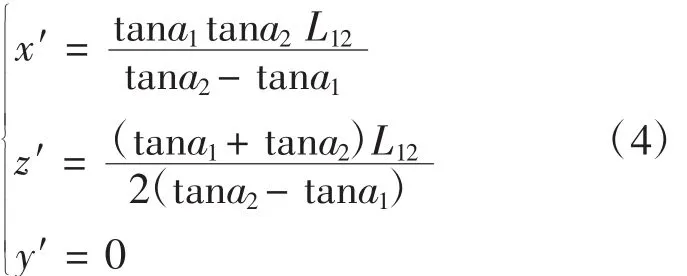
探測點(diǎn)P1在坐標(biāo)系o′x′y′z′中的坐標(biāo))與靶場坐標(biāo)系oxyz中的坐標(biāo)P1(x1,y1,z1)的轉(zhuǎn)換
關(guān)系為:

式(5)中,當(dāng)相機(jī)1、2與靶心處于同一水平面上,并且相機(jī)1、2的位置點(diǎn)對稱分布在中心彈道在水平面投影的兩邊,則相機(jī)T1、T2的對稱中心在靶場坐標(biāo)系oxyz中的坐標(biāo)。其中轉(zhuǎn)換矩陣如下:

L 式(6)中,當(dāng)相機(jī)為 T1、T2時,i=1,2;當(dāng)相機(jī)為T3、T4時,i=3,4。
同理,可得相機(jī)T3,T4決定的探測點(diǎn)P2(x2,y2,z2)。那么,彈道方程為:

在式(7)中令y=0,可得彈著點(diǎn)坐標(biāo)為
2 實(shí)驗(yàn)驗(yàn)證及系統(tǒng)誤差分析
2.1 實(shí)驗(yàn)驗(yàn)證
本實(shí)驗(yàn)利用面陣相機(jī)模擬線陣相機(jī)進(jìn)行探測,圖4為該模擬實(shí)驗(yàn)示意圖。實(shí)驗(yàn)準(zhǔn)備工作如下:(1)選取六組模擬彈著點(diǎn),用繩子模擬彈道;(2)標(biāo)定4臺相機(jī)最大視場角;(3)建立地面坐標(biāo)系:oxyz;(4)建立中心彈道:使中心彈道在地面的投影與ox軸重合。使4臺相機(jī)沿ox軸對稱分布,記錄4臺相機(jī)的坐標(biāo)值;(5)調(diào)整相機(jī)的滾動角為0°。在俯仰上調(diào)整相機(jī),使中心彈道上的對稱點(diǎn)分別在對稱相機(jī)的圖像中心,通過相機(jī)的坐標(biāo)和中心彈道上對稱點(diǎn)的坐標(biāo)推算出相機(jī)的俯仰角。整理記錄:通過測量得出4臺相機(jī)的視場角,坐標(biāo)值以及相機(jī)坐標(biāo)系相對地面坐標(biāo)系的俯仰角、偏航角、滾動角。實(shí)驗(yàn)過程:四臺線陣相機(jī)姿態(tài)和位置標(biāo)定后,選取六組彈著點(diǎn),每組彈著點(diǎn)對應(yīng)一條模擬彈道,通過相機(jī)拍攝、像素采集、模型計算處理每組數(shù)據(jù),得到每組實(shí)際彈著點(diǎn)對應(yīng)的理論彈著點(diǎn),如表1所示。
圖4 模擬實(shí)驗(yàn)示意圖

表1 理論彈著點(diǎn)計算結(jié)果
通過六組實(shí)驗(yàn)中,實(shí)際彈著點(diǎn)和理論彈著點(diǎn)的比較,可以得出:通過模型計算出的理論彈著點(diǎn)與預(yù)先選定的實(shí)際彈著點(diǎn)存在偏差,但在一定誤差范圍內(nèi),可認(rèn)為實(shí)際彈著點(diǎn)與理論彈著點(diǎn)相對一致,能夠滿足精度要求,通過一定的誤差處理方法即可減小誤差。
2.2 誤差分析
任何系統(tǒng)在探測過程中總會存在著誤差,本系統(tǒng)也不例外。本報靶系統(tǒng)定位誤差的大小由系統(tǒng)固定誤差和隨機(jī)誤差引起的。
2.2.1 系統(tǒng)固定誤差來源
本報靶系統(tǒng)的固定誤差主要由打靶訓(xùn)練時,彈丸爆炸對相機(jī)姿態(tài)的影響。由于彈丸爆炸時,相機(jī)震動在一定程度上會影響相機(jī)的姿態(tài)參數(shù),從而造成誤差。此誤差是固定的,即在系統(tǒng)狀態(tài)正常、不出現(xiàn)任何故障以及外界環(huán)境良好的情況下,系統(tǒng)一旦固定,可以采取系統(tǒng)標(biāo)定的方法對誤差進(jìn)行修正;系統(tǒng)安裝位置誤差可以根據(jù)靶場特點(diǎn)尋求最佳安裝位置,在對系統(tǒng)元器件安裝位置確定后,通過多次校準(zhǔn)可以減小。在實(shí)際靶場打靶訓(xùn)練時,該報靶系統(tǒng)需要在相機(jī)周圍采取減震措施,來減小誤差。在采取減震措施之后,系統(tǒng)固定誤差對系統(tǒng)造成的影響很小且?guī)缀跏枪潭ú蛔兊摹R虼耍瑸榱颂岣呦到y(tǒng)測距定位精度,減小隨機(jī)誤差的影響是研究的重點(diǎn)。
2.2.2 系統(tǒng)隨機(jī)誤差來源
系統(tǒng)隨機(jī)誤差即每次探測定位中,大小都會隨距離等因素而變化的誤差,主要包括測量誤差和定位誤差。定位誤差即對測量數(shù)據(jù)進(jìn)行處理的數(shù)據(jù)處理方法引起的誤差,根據(jù)數(shù)據(jù)特征采取相適應(yīng)的數(shù)據(jù)處理方法可減小定位誤差。方法處理得當(dāng),則定位精確,誤差較小,一般采用特異值數(shù)據(jù)處理和線性回歸數(shù)據(jù)處理等方法來減小隨機(jī)誤差。
3 結(jié)語
本文介紹了一種基于線陣相機(jī)工作原理的打靶訓(xùn)練報靶系統(tǒng)彈著點(diǎn)解算模型,通過一定的靶場布置、線陣相機(jī)拍攝模擬彈道、像素采集,空間解析計算等方法推算出理論彈道,并與實(shí)際模擬彈著點(diǎn)比較。通過多組模擬實(shí)驗(yàn),分析計算結(jié)果,可得該模型能夠客觀反映彈著點(diǎn)規(guī)律,采取一定的誤差處理方法可提高系統(tǒng)精度。該解算模型為報靶系統(tǒng)的實(shí)現(xiàn)提供了理論依據(jù)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12