地面合成孔徑雷達(dá)與三維激光掃描集成技術(shù)在大壩監(jiān)測中的應(yīng)用
2019-07-18 08:17:32紀(jì)志剛洪琲琲
天津建設(shè)科技 2019年3期
關(guān)鍵詞:方向
□文/紀(jì)志剛 洪琲琲
近年來,遙感技術(shù)研究不斷深入,兩種典型的遙感技術(shù)——地面合成孔徑雷達(dá)和三維激光掃描技術(shù),各有特點(diǎn):地面合成孔徑雷達(dá)精度高;三維激光掃描是三維視圖,更直觀。大壩一直是我國重要的防洪、發(fā)電和灌溉設(shè)施,需要采用必要的手段對大壩進(jìn)行監(jiān)測,而傳統(tǒng)的監(jiān)測手段已不能適應(yīng)工程發(fā)展的要求,本文旨在將二種技術(shù)相結(jié)合應(yīng)用于大壩變形監(jiān)測,充分利用三維激光掃描技術(shù)三維可視化特性和地面合成孔徑雷達(dá)的高精度特性,使二者相互補(bǔ)充,以達(dá)到三維方式高精度展示工程表面形變的目的。
1 地面合成孔徑雷達(dá)和三維激光雷達(dá)掃描數(shù)據(jù)的配準(zhǔn)
地面合成孔徑雷達(dá)圖像坐標(biāo)系統(tǒng)[1]見圖1。
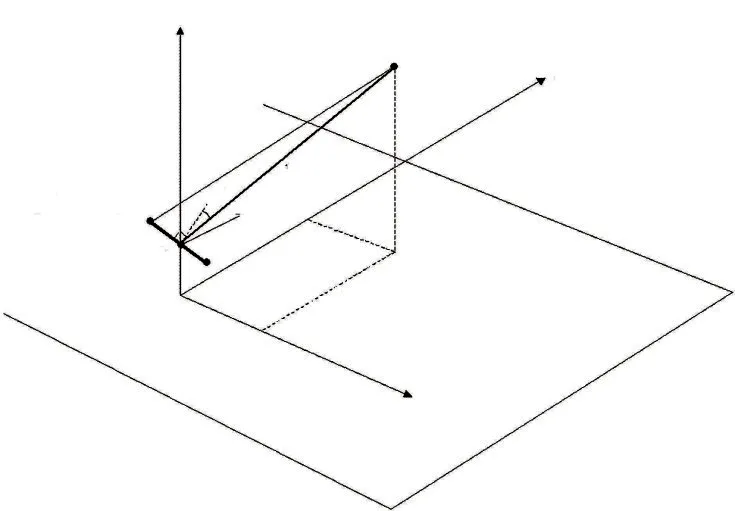
圖1 地面合成孔徑雷達(dá)坐標(biāo)系統(tǒng)
圖1中:P(x,y,z)為目標(biāo)點(diǎn)坐標(biāo);A(xα,0,zα)為接收/發(fā)射天線的坐標(biāo),隨傳感器在軌道上位置的變化而變化,進(jìn)而形成合成孔徑天線;x軸平行于軌道方向;經(jīng)過原點(diǎn)且垂直于軌道方向(距離向)為y軸方向;經(jīng)過原點(diǎn)且垂直于xoy平面方向?yàn)閦軸方向;zα為傳感器中心位置距參考平面的高度;R(r,ψ)為傳感器收發(fā)天線至目標(biāo)點(diǎn)的距離[2]。
如圖2 所示,將傳感器在不同位置時(shí)的天線看為主輔天線。
主輔天線至P 點(diǎn)距離之差Δr 為
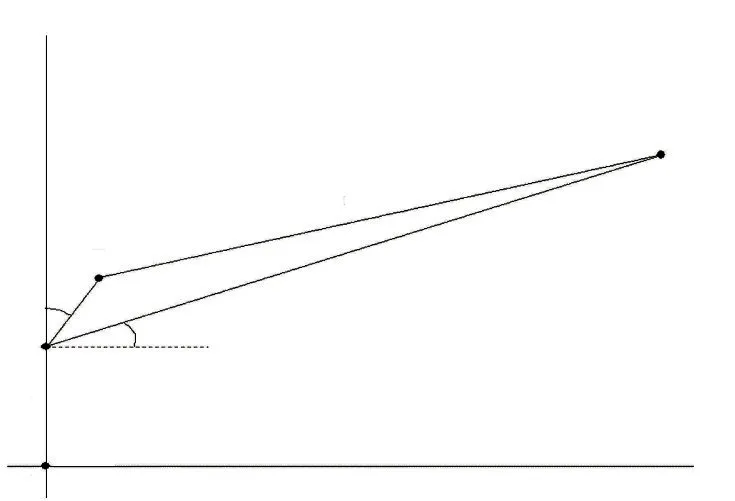
圖2 地面合成孔徑雷達(dá)成像

其中有效基線長度B和傾角ε的求解公式


有效基線的水平分量與ψ有關(guān),其關(guān)系表達(dá)式

對于ψ方向的點(diǎn),有效水平基線即為初始水平基線在ψ方向的投影,可以得到地形高度z與干涉相位φ和Δr之間的關(guān)系
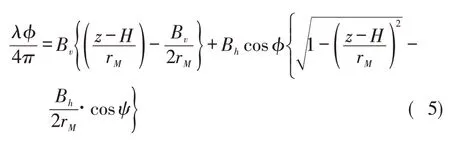
地面合成孔徑雷達(dá)系統(tǒng)通過高程與相位的關(guān)系實(shí)現(xiàn)地形測量,(x,y)坐標(biāo)的計(jì)算公式[2]

地面合成孔徑雷達(dá)與三維激光掃描掃描數(shù)據(jù)之間的配準(zhǔn)實(shí)際上就是兩個(gè)空間直角坐標(biāo)系之間的轉(zhuǎn)換問題。三維激光掃描所需點(diǎn)云數(shù)據(jù)可以從導(dǎo)出的txt文件中經(jīng)篩選得到,表示為xTLS、yTLS、zTLS;地面合成孔徑雷達(dá)相應(yīng)點(diǎn)平面坐標(biāo)可通過matlab 的抓取功能,由gpick()函數(shù)從位移圖中獲得。然后根據(jù)式(1)~(7)反推,可得到地面點(diǎn)相對于參考面的高程(即z 坐標(biāo))和角度ψ,從而得到所需點(diǎn)的三維坐標(biāo)(x,y,z)。這里地面合成孔徑雷達(dá)空間坐標(biāo)系表示為xSAR、ySAR、zSAR。
為準(zhǔn)確地將地面合成孔徑雷達(dá)影像配準(zhǔn)到由三維激光數(shù)據(jù)建成的DEM(坐標(biāo)定義為xDEM、yEM、zDEM)上,需要確定地面合成孔徑雷達(dá)坐標(biāo)系統(tǒng)和DEM 坐標(biāo)系統(tǒng)之間的轉(zhuǎn)換關(guān)系。
地面合成孔徑雷達(dá)坐標(biāo)系和DEM 坐標(biāo)系統(tǒng)的轉(zhuǎn)換存在7 個(gè)參數(shù),分別為3 個(gè)平移參數(shù)、3 個(gè)旋轉(zhuǎn)參數(shù)和1個(gè)尺度參數(shù),相應(yīng)的坐標(biāo)變換公式
式中:△x0、△y0、△z0為平移參數(shù);εx、εy、εz為旋轉(zhuǎn)參數(shù),m為尺度變化參數(shù)。
誤差方程
根據(jù)最小二乘法VTPV=min的原則,利用至少3個(gè)已知控制點(diǎn)求得7個(gè)參數(shù)值[3],最后利用求得的轉(zhuǎn)換參數(shù)實(shí)現(xiàn)兩坐標(biāo)系之間的轉(zhuǎn)換。
2 工程實(shí)例
隔河巖大壩位于中國湖北長陽縣長江支流的清江干流上,下距清江河口62 km、距長陽縣城9 km,屬于混凝土重力拱壩,最大壩高151 m。水庫總庫容34 億m3。
2.1 數(shù)據(jù)獲取
2.1.1 地面合成孔徑雷達(dá)數(shù)據(jù)
試驗(yàn)進(jìn)行期間天氣狀況良好,將地面合成孔徑雷達(dá)設(shè)備安置在距離大壩300 m 的正前方,保證地面合成孔徑雷達(dá)的視線方向與大壩形變方向一致,所獲結(jié)果能直接反應(yīng)大壩的形變情況。采樣頻率為20 min,對大壩進(jìn)行持續(xù)觀測,共維持8 h,獲取28景影像。見圖3。

圖3 地面合成孔徑雷達(dá)
2.1.2 點(diǎn)云數(shù)據(jù)
采用RIGEL 公司的VZ-400 型號(hào)三維激光掃描儀及用于控制和數(shù)據(jù)處理的RISCAN PRO 軟件包,利用三維激光掃描儀進(jìn)行掃描。先對大壩周圍環(huán)境進(jìn)行全景掃描,所用采樣率為系統(tǒng)自動(dòng)采樣率;掃描完成后,重新設(shè)定采樣率為10 mm,對大壩進(jìn)行精掃,時(shí)間共持續(xù)20 min。見圖4。

圖4 地面三維激光掃描
2.2 數(shù)據(jù)處理
2.2.1 預(yù)處理
分別對采集的地面合成孔徑雷達(dá)和三維激光掃描數(shù)據(jù)進(jìn)行濾波和去噪處理。見圖5和圖6。
圖5 大壩表面位移
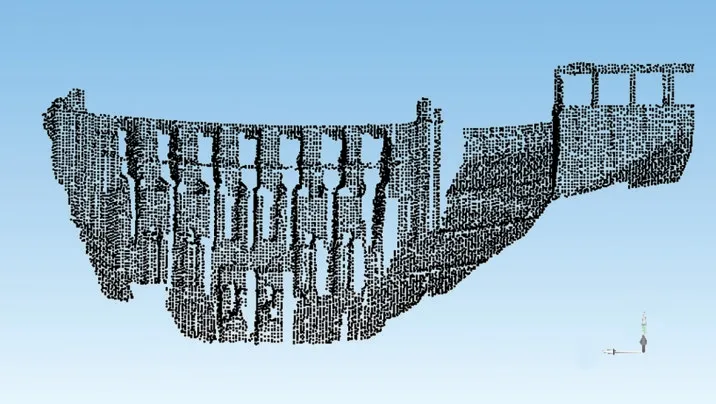
圖6 大壩表面點(diǎn)云
圖5中正值表示目標(biāo)與儀器直接視線向距離的增加,負(fù)值表示目標(biāo)與儀器直接視線向距離的減少。由圖5可以看出,在整個(gè)觀測時(shí)間段內(nèi),壩體的大部分位移在2 mm以內(nèi),大壩整體處于相對穩(wěn)定狀態(tài)。
2.2.2 三維干涉雷達(dá)點(diǎn)云的生成
基于matlab 的多維可視化功能,三維干涉雷達(dá)點(diǎn)云的生成通過matlab程序?qū)崿F(xiàn)。
首先,從IBIS_DV 軟件和RISCAN PRO 軟件中提取合成孔徑雷達(dá)和三維激光掃描處理后的位移圖數(shù)據(jù)和點(diǎn)云數(shù)據(jù)。
在 matlab 中分別利用 gpick()函數(shù)從圖 5 和圖 6 中分別選擇7 個(gè)公共控制點(diǎn),獲取公共控制點(diǎn)的圖上坐標(biāo),見表1。
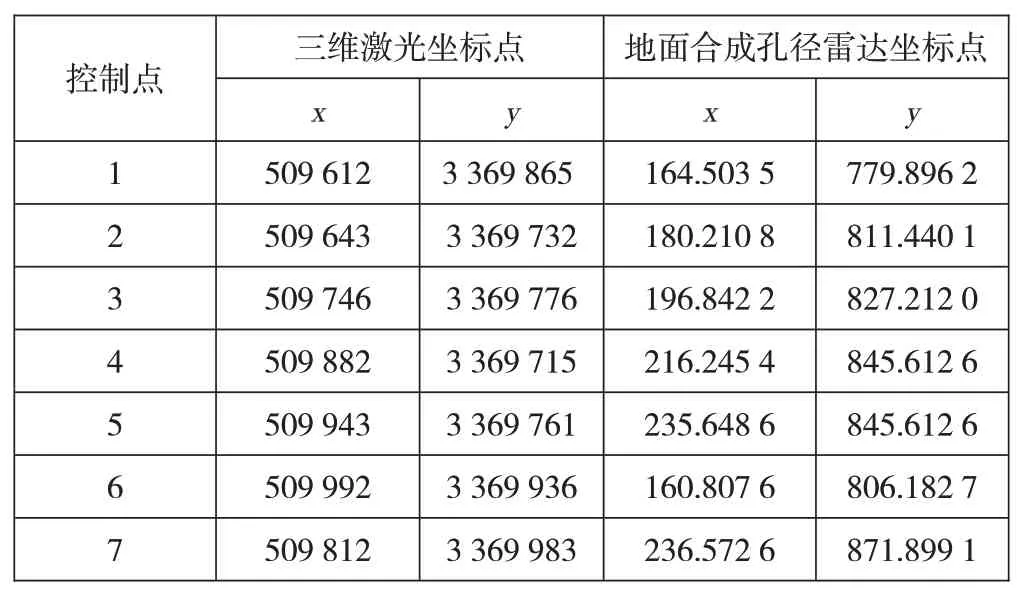
表1 公共控制點(diǎn)坐標(biāo) m
對三維激光掃描點(diǎn),利用已知的平面坐標(biāo),通過循環(huán)結(jié)構(gòu),找到點(diǎn)1~7在局部坐標(biāo)系中的三維坐標(biāo);對地面合成孔徑雷達(dá)點(diǎn),首先利用已知平面坐標(biāo),結(jié)合式(1)~(8)反求出平面點(diǎn)對應(yīng)的高程坐標(biāo)。見表2。
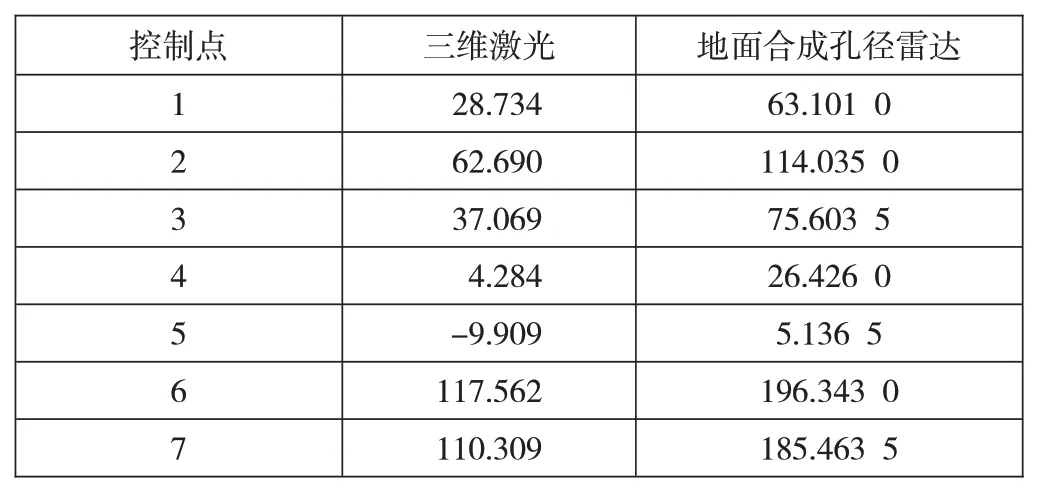
表2 所選控制點(diǎn)高程坐標(biāo) m
然后進(jìn)行坐標(biāo)轉(zhuǎn)換,獲得最終配準(zhǔn)結(jié)果,見圖7。
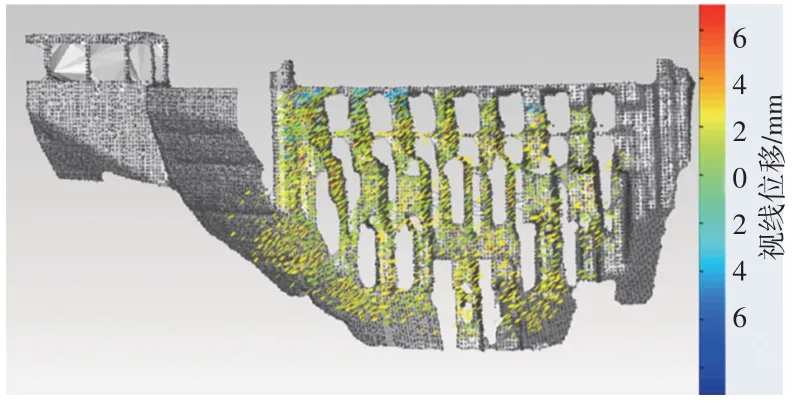
圖7 三維干涉雷達(dá)點(diǎn)云
圖7是高精度位移信息和三維可視化空間信息的集成,保留了合成孔徑雷達(dá)和三維激光掃描兩者的優(yōu)點(diǎn)。
準(zhǔn)確的雷達(dá)位置信息是配準(zhǔn)進(jìn)行的前提,配準(zhǔn)連同校準(zhǔn)階段一同進(jìn)行,是一個(gè)迭代循環(huán)的過程。當(dāng)目標(biāo)發(fā)生顯著位移變化時(shí),需要重新采集數(shù)據(jù)并重復(fù)上述步驟,通過不斷計(jì)算兩者的相關(guān)系數(shù),最終完成配準(zhǔn)。
2.3 結(jié)果分析
為了看大壩表面點(diǎn)具體的位移情況,從大壩上下位置各取5個(gè)點(diǎn)進(jìn)行分析,見圖8。
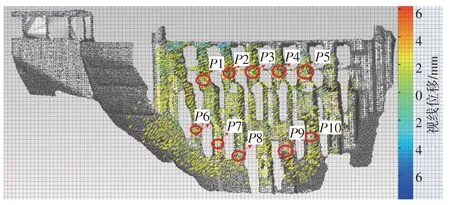
圖8 所選控制點(diǎn)標(biāo)識(shí)
提取10個(gè)所選點(diǎn)的位移數(shù)據(jù),計(jì)算兩兩之間的相關(guān)系數(shù)[3]
式中:xi和yi為兩組不同的位移-時(shí)間序列;rxy即為序列xi和yi之間的相關(guān)系數(shù)且|rxy|≤1,在這個(gè)范圍內(nèi),相關(guān)系數(shù)越大,代表兩組序列的相關(guān)性越大。
經(jīng)計(jì)算,所選10個(gè)點(diǎn)的相關(guān)系數(shù)見表3。
由表3 可知,10 個(gè)點(diǎn)的相關(guān)系數(shù)均在0.88 以上,相關(guān)性較高。另外,7~9 點(diǎn)與其他點(diǎn)的相關(guān)性相對較低,可能是因?yàn)檫@3 個(gè)點(diǎn)位置較低,受到的水壓較大。
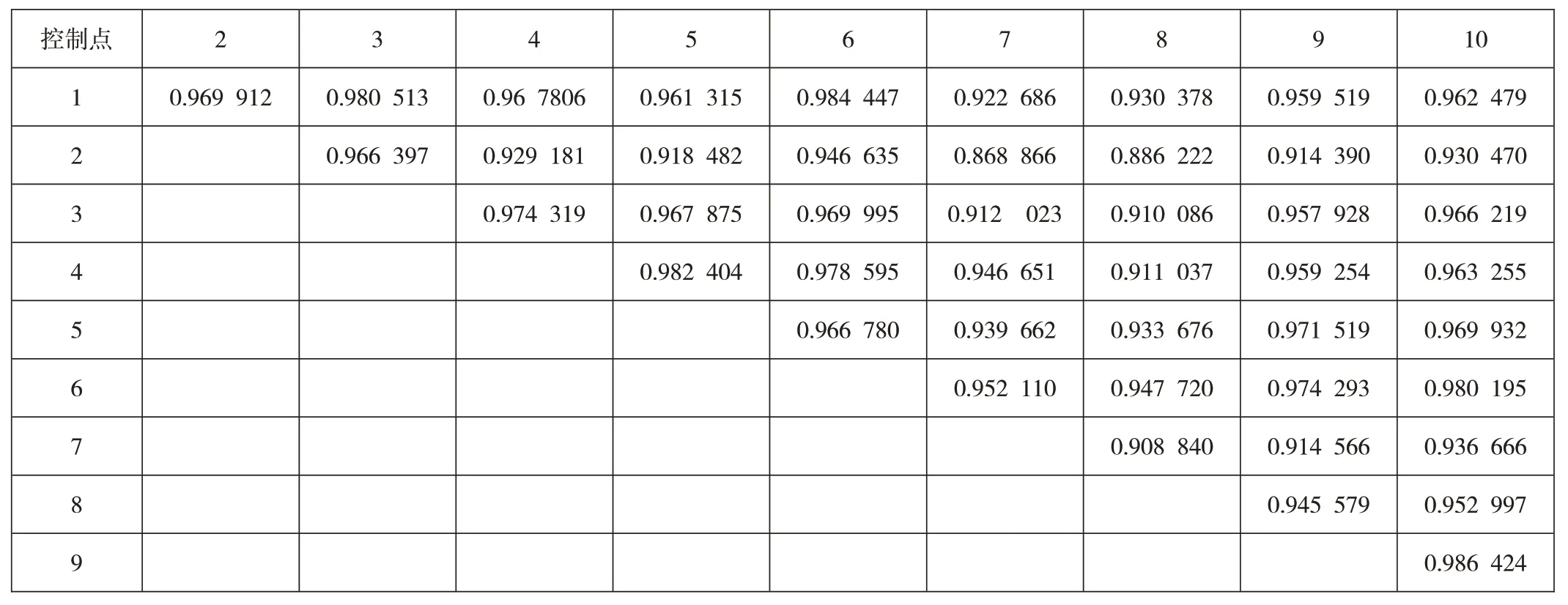
表3 控制點(diǎn)相關(guān)系數(shù)
3 結(jié)語
來源于地面合成孔徑雷達(dá)的結(jié)構(gòu)形變數(shù)據(jù)與來源于地面三維激光掃描的點(diǎn)云數(shù)據(jù)可以共同應(yīng)用于大壩結(jié)構(gòu)的穩(wěn)定性分析。地面合成孔徑雷達(dá)與地面三維激光掃描各具特性,將兩者結(jié)合使用,提供了一種全新的大壩形變監(jiān)測方法和應(yīng)急手段,克服了傳統(tǒng)二維視圖所帶來的不便。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(2017年11期)2017-11-29 01:35:50