小型消費級無人機在獲取大比例尺地形數據中的應用研究
2019-07-19 06:24:27姬洪亮
價值工程 2019年8期
姬洪亮

摘要:以某測區1:1000地形圖測繪項目為例,介紹了利用小型消費級無人機DJI Phantom 4 Pro和PhotoScan影像處理軟件獲取4D產品的基本流程。通過GNSS RTK實測數據與獲取地形數據進行精度評價,平面中誤差為0.136m,高程中誤差為0.072m,結果滿足規范要求,而且對更大比例尺地形圖測繪也有借鑒意義。
Abstract: Taking a surveying project of 1:1000 topographic map as an example, this article introduced the basic process of acquiring 4D products using small consumer UAV DJI Phantom 4 Pro and PhotoScan image processing software. Through accuracy evaluation by GNSS RTK measured data and acquired topographic data, the mean error is 0.136m in the horizontal direction and 0.072m in the vertical direction. The result meets the specification requirements, and the mapping of larger scale topographic maps is also useful for reference.
關鍵詞:小型消費級無人機;遙感系統;大比例尺;地形數據
Key words: small consumer UAV;remote sensing;large scale;topographic data
中圖分類號:P231.5 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2019)08-0176-04
0 ?引言
隨著社會經濟及科學技術的進步,國土資源及其他各行各業對大比例尺、高分辨率數據的需求也日益增加,以此為契機,無人機低空數字遙感領域也得到飛速發展。在制作成本和操控性方面有了革命性的發展,從而使無人機從傳統的軍事、航測等專業領域步入大眾消費市場,無人機在獲取數據成本低、機動靈活、速度快、空間分辨率高等優點,在國情監測、地質、精準農業、環境監測及城市規劃等領域獲得了廣泛的應用[1]。
根據應用領域的不同可將無人機分為大型專業級和小型消費級。已有學者通過研究表明大型專業級無人機的測量精度可以達到厘米級,但大型專業級無人機工作流程繁瑣,操控難度大,需要專業操控手而且必須申請飛行空域,天氣變化也很容易影響其工作狀態,因此限制了其快速靈活的獲取地形數據。相對而言,小型消費級無人機具有易上手、低成本、高效率及飛行靈活等優勢[2]。然而,目前針對小型消費型無人機獲取大比例尺地形數據和對獲取的數據精度研究不足,亟待進行更加深入的探討。本文以此為出發點,選擇一小面積測區通過小型消費級無人機獲取大比例尺地形數據,并結合RTK實測數據驗證評價獲取地形數據的精度。
1 ?無人機遙感系統
無人機遙感(UAV Remote Sensing, UAVRS)是利用先進的無人機駕駛飛行器技術、遙感傳感器技術、遙測遙控技術、通信技術、POS定位定姿技術、GPS差分定位技術和遙感應用技術,具有自動化、智能化、專業化快速獲取國土、資源、環境、事件等空間遙感信息,并進行實施處理、建模和分析的先進新興航空遙感技術解決方案[3]。
現階段無人機類型主要有無人直升機、固定翼無人機、多旋翼無人機等多種類型,各類型無人機都有不同的應用領域和技術特點。多旋翼無人機飛行速度、飛行高速可以自由調整,可低空飛行且幾乎不受起降場地的限制,操作方便、簡單靈活,更適宜于小面積大比例尺地形數據的獲取,因此筆者選用大疆創新科技精靈系列四旋翼小型消費級無人機(DJI Phantom 4 Pro)。
Phantom 4 Pro由飛行器、遙控器、云臺相機以及配套使用的DJI GO 4 APP組成,飛行器重為1388g,飛行器機身內部集成了飛控系統,具備指南針系統和雙冗余慣性測量單元,機身配備先進的視覺定位以及障礙物感知系統,配備全新24mm低畸變廣角相機、高精度防抖云臺以及1英寸CMOS圖像傳感器,云臺配備精度為±0.02°的影像穩定系統,可以拍攝高質量2000萬像素JPEG以及無損RAW格式像片。最大水平飛行速度為20米/秒,工作時間約為30分鐘。
2 ?應用實例
2.1 外業數據獲取
研究以某測區1:1000地形圖基礎測繪項目為例,測區面積約為2km2,地形為丘陵,海拔最高1911m,最低為1717m,測區地物為草地,有少量道路和房屋,房屋多為平房。測區像片控制點(以下簡稱像控點)采用統一的區域網布設方案,要求所有的像控點為平高控制點,一個飛行架次內不得少于3個像控制點,在測區范圍內均勻布設9個像控點,像控點的平面及高程測量均采用GPS RTK測量技術進行測量,平面控制點相對臨近基礎控制點的平面位置中誤差不應超過地物點平面位置中誤差的1/5,高程控制點相對臨近基礎控制點的高程中誤差不應超過基本等高距的1/10[4]。
工作過程中選用大疆創新科技研發的DJI GS PRO地面站,它是一款強大的無人機操作及綜合管理的iPad端應用程序。通過直觀簡易的交互設計,只需要簡單的屏幕操作就可以完成規劃復雜的航線任務,實現全自動航點飛行作業。可以通過自主設計飛行航線、飛行速度、拍照間隔、拍照模式、航向旁向重疊度等參數,實例中航攝設計航高為200m相對航高,設計20條航線,分兩個架次完成,共拍攝512張像片。航向重疊度為80%,旁向重疊度為65%,攝區邊界覆蓋一般不少于像幅的30%;每條航線首尾位置按超出攝區所在圖幅邊界外至少各一條基線。航攝比例尺為1:1000,拍攝得到的像片地面分辨率為7.6cm。外業作業流程嚴格執行《低空數字航空攝影規范》要求,既要保證具有充足的光照度,又要避免過大的陰影,航攝時間限制在上午11時至下午17時之間,從而保證飛行質量,在完成攝影后,要仔細進行質量檢查,質量檢查內容包括:①影像清晰度;②重疊度及航攝漏洞;③航攝區域與成圖區域覆蓋情況;④航片的傾角、旋偏角、航線的彎曲度符合技術要求。如有不符合要求的情況,需要及時進行補飛,務必最終檢查原始航片圖像清晰、曝光準確、無航攝漏洞、重疊度和圖像質量達到規范要求。
2.2 內業數據處理
無人機遙感影像數據處理原理同數字攝影測量原理一樣,也是對在兩點拍攝的具有規定重疊度的2張影像,建立攝影瞬間投影中心、地物和影像之間的共線方程,根據地面控制點(ground control point,GCP)的實際坐標,算出與影像連接點(tie point,TP)對應的地物三維坐標[5]。
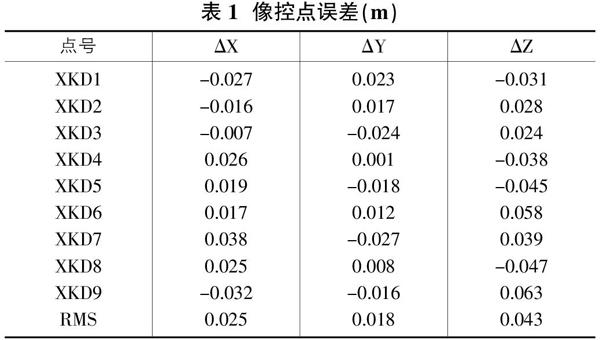
本次選用的影像處理軟件是PhotoScan,PhotoScan可以從一組具有相關參考信息、并且具有一定重疊度的圖像中聲稱地理參考密集點云,紋理多邊形模型,數字高程模型以及數字正射影像圖。首先將獲得的各項原始數據進行收集整理及預處理,導入影像處理軟件PhotoScan中,通過POS數據及相應相機參數可計算出照片姿態及位置;對齊照片,PhotoScan可以在此階段找到重疊相片之間的匹配點,計算每張相片的相機位置并構建稀疏點云模型;放置標記(刺點),標記用于優化攝像機位置和方向數據,從而可以獲得更好的模型參考結果,將9個均勻分布在測區內的地面控制點(GCP)坐標準確的標記在含有GCP的相片上;檢查每張相關相片上的標記點位置,并在需要時優化位置從而提高精度,為了在計算相機外部和內部參數以及校正可能的失真時獲得更高的準確度,應該運行優化相機對齊程序,像控點殘差如表1所示;從工作流程菜單中選擇“建立密集點云”命令,基于估計的相機位置,程序計算出每個相機的深度信息,以組合成單個密集點云;在建立密集點云之后,基于密集點運數據生成多邊形網絡模型;基于密集點云或網絡模型生成數字高程模型;從工作流程菜單中選擇“Build Orthomosaic”命令生成正射影像,最后便可導出DEM、DOM[6]。
地形數據獲取采用全數字立體測圖技術方法,采用“由內業至外業”的作業流程。依據“內業定位,外業定性”的宗旨,通過無人機遙感影像數據和空中三角測量成果,利用全數字攝影測量工作站進行高自動化的數據處理,極大的減少人工干預,獲取地形圖地貌、地物要素,然后通過外業對地形數據進行全面的修測補測和屬性調查。最終通過數字正射影像圖和野外調繪完成數字線劃圖的制作。本次數字處理流程如圖1所示。
3 ?結果分析
3.1 誤差來源分析
在航空攝影理論中,對于產品結果精度的分析可通過像點的精度、定向點的精度以及檢查點的精度來考慮,而且通常來說,外業飛行質量、相片獲取質量、相片地面分辨率、空三加密精度都會對最終數字產品的精度產生影響[8]。一般來說,影響空中三角測量精度的原因主要包含兩大類:一個是對原始觀測數據精度產生直接影響的因素,例如航攝儀參數(像元數、像元尺寸、像元角、焦距、像移補償等)、航攝比例尺、空中三角測量作用過程中使用的測量儀器和攝影材料的穩定性以及像片系統誤差的改正等;另一個是影響區域網幾何強度的要素,包括布設區域網像控點的采集精度、像控點數量和分布情況、航線設計的規律及重疊度的大小、輔助數據(GPS/POS)的使用情況、空中三角測量數據處理過程中控制點權值大小的設置等。結合本次實驗發現外業像控點標記時產生了較大的誤差,產生的原因主要是外業像控點的的布設位置不夠合理(布設像控點位置不夠平坦)、像控點標記不夠明顯,不易判讀。造成在內業處理時進行像控點標記時目標點不明確,刺點精度低;像控點布設位置不夠平坦會帶來較大的高程殘差。同時在以后的研究過程中可以考慮多種像片控制點的布設方案,從而來比較區域網布設方案對空中三角測量精度的影響。
3.2 數據產品精度評估
通過PhotoScan軟件處理生成的測區正射影像和數字高程模型如圖2圖3所示,該影像沒有經過后期處理,通過目視判讀可以初步看出DOM數據拼接效果較好,無錯縫,色調也較均勻,明暗反差適宜,地物判讀比較容易。
為評估地形數據測繪產品的幾何精度,采集像控點階段,在測區范圍內按照均勻分布的原則,依照像控點測量的要求同時采集一定數量的平高檢查點用來進行精度檢測。實際工作中通過GNSS RTK測量一定數量的檢查點,以真實坐標作為參考值來評定最終地形數據的精度,可以在外業布設控制點時直接布設平高檢查點,也可以在外業調繪過程中采用全野外解析法,測取一些特征明顯的地物點作為檢查點,如房屋角點、構筑物拐點作為平面檢查點,在高程變化較小的地方設置高程檢查點。研究中在測區通過GNSS RTK實測了29個平高檢查點,將這些檢查點的數值與數字線劃圖和點云數據進行對比,檢查點的平面中誤差和高程中誤差可按照公式(1)計算[7],誤差統計結果見表2、表3。
式中,m1為檢查點中誤差,Δ為檢查點野外實測值與解算值的誤差,n為參與評定精度的檢查點數。
從表2、表3中可以看出,無人機遙感影像處理結果最大平面誤差為0.267m,平面中誤差為0.136m,平面誤差在5-10cm的占比28%,平面誤差在10-15cm的占比52%,平面誤差在15-20cm的占比10%,平面誤差在20cm以上的占比10%;最大高程誤差為0.187m,高程中誤差為0.072m,高程誤差在5cm以內的占比66%,高程誤差在5-10cm的占比21%,高程誤差在10-15cm的占比10%,高程中誤差在15-20cm的占比3%,誤差沒有大于20cm的檢查點。平面精度和高程精度都比較好,而且誤差分布規律符合標準正態分布。根據《GB/T 23236-2009 數字航空攝影測量空中三角測量規范》要求,1:1000比例尺在檢查點平面和高程誤差最大限值分別為0.50m和0.28m,本次結果遠高于限差要求,且檢查點中有86%的平面誤差和90%的高程誤差值滿足1:500比例尺檢查點平面和高程最大限值0.175m和0.150m的要求,因此小型消費級無人機在獲取更大比例尺地形數據中的應用前景依然廣闊。
4 ?結束語
本文對小型消費級無人機在獲取大比例尺地形數據應用技術進行了探索,以某小面積測區項目進行實驗,獲取了測繪4D產品。通過此次實驗我們可以了解到小型消費級無人機獲取數據的整個流程,通過PhotoScan對無人機影像數據進行處理,得到了高質量的地形數據,平面中誤差為0.136m,高程中誤差為0.072m,可滿足1:1000地形圖的精度要求,數據處理結果精度明顯優于項目精度要求,而且對于更大比例尺的測量項目也可采用該方案。小型消費級無人機低空攝影測量技術的優勢在研究中得到了充分的體現,既可以快速、高效的完成工作任務,又節約了大量的人力和物力成本,小型消費級無人機在今后的應用前景將更加廣闊。
參考文獻:
[1]畢凱,李英成,丁曉波,等.輕小型無人機航攝技術現狀及發展趨勢[J].測繪通報,2015(3):27-31,48.
[2]張純斌,楊勝天,趙長森,等.小型消費級無人機地形數據精度驗證[J].遙感學報,2018,22(1):185-195.
[3]李德仁,李明.無人機遙感系統的進展與應用前景[J].武漢大學學報·信息科學版,2014,39(5):505-513,540.
[4]國家測繪局測繪標準化研究所.GB/T 7931-2008 1:500 1:1000 1:2000地形圖航空攝影測量外業規范[S].北京:中國標準出版社,2008.
[5]張祖勛,張劍清.數字攝影測量學[M].武漢大學出版社,2012.
[6]鄒長慧,周忠發.喀斯特高原山區無人機低空遙感影像數據的獲取與處理[J].測繪通報,2012(S1):421-423.
[7]國家測繪地理信息局.GB/T 23236-2009 數字航空攝影測量空中三角測量規范[S].北京:中國標準出版社,2009.
[8]劉元慶,徐柳華,沈彩蓮,等.基于無人機飛行器遙感影像的數字攝影測量關鍵技術研究[J].測繪科學,2010,35(1):28-30.