ROV 水下機器人探測技術在供水管道內部檢測應用實踐及探討
2019-07-20 07:56:56邱晨
建材發展導向 2019年18期
關鍵詞:檢測
邱 晨
1 檢測試驗背景
1.1 檢測對象簡介
本次檢測管道為華南地區某水廠DN1800 輸水管X 村段,檢測長度1700 米。
1.2 檢測地區背景及管道地理位置
X 村總面積約8 平方公里,常住人口7000 余人人,外來人口6 萬多人,月供水量可達70 萬立方米,在冊水量20 萬立方米,產銷差達到65%以上。本次檢測管道期間經過部門民房騎壓段、管道轉角段等,檢測具有一定的難度。
2 檢測方案及結果
此次檢測試驗分為兩次進行。后一次試驗針對第一次試驗中ROV 機器人暴露出的數據傳輸速率慢問題進行改良,并取得了較好效果。
2.1 檢測方案
本次檢測試驗分為A、B、C 三段,其中A 段計劃檢測520 米、B 段計劃檢測720 米、C 段計劃檢測500 米,共計1740 米,根據ROV 機器人單次檢測距離及管道路由確定投放次數為五次,檢測時間為晚十點至次日早八點共10 個小時。
2.2 檢測結果
實際檢測距離為A 段490 米、B 段450 米、C 段因ROV機器故障未開展檢測,共計950 米。此次檢測發現已封堵違規管道接駁口2 個,詳見附表及附圖:
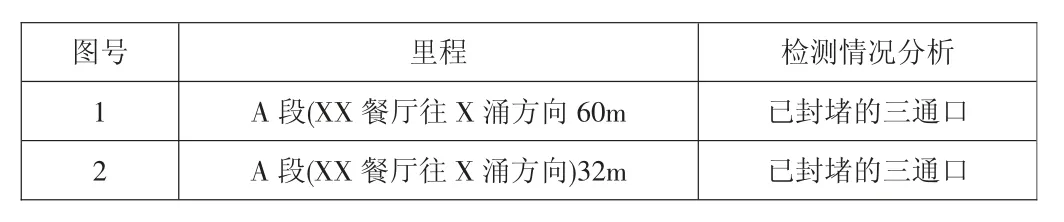
檢測結果匯總表
3 ROV 機器人優缺點分析及后續發展方向進行探討
兩次檢測試驗取得了較好的成果,該水廠DN1800 輸水管運行情況總體良好,管道基本無滲漏情況,但存在數個已封堵的違規叉口,以往可能發生偷盜水的情況。
3.1 ROV 機器人在管道內部檢測時的優缺點分析
檢測試驗結果表明,ROV 基本能夠勝任管道內部的檢測工作,其檢測圖像清晰,檢測距離較遠,動力強勁,技術人員可通過成像技術對管道運行情況、違規開孔情況進行有效分析。但在第一次檢測過程中,ROV 機器人暴露出了檢測距離超200m 時圖像傳輸不穩定的問題,后通過技術分析,得出系原有傳輸線零浮力光纜無法進行遠距離實時數據傳輸,后通過改造升級,將原有零浮力光纜替換為光纖解決了此問題,并在第二次檢測中實現了300m 距離內的穩定圖像傳輸。但此次檢測也暴露處了ROV 機器人在定位功能方面的確實,檢測過程中如發現了違規開孔或疑似滲漏點,需人工開挖進行二次確認,此時ROV 機器人無法給出準確坐標將為后續工作開展帶來一定困難。
3.2 后續發展方向探討
ROV 機器人作為最新科技產品,其無需人工進入管道內部便可進行系統、全面檢測,該技術的其安全性、高效性均是傳統人工檢測無法比擬的,若在傳輸方式、定位功能、帶壓作業即不停水檢測等方面取得突破,其在管道內檢測的應用前景必將更為廣闊。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48