基于 Arduino 的直升機動平衡輔助計算設備開發
2019-07-20 13:24:35徐盟
電子技術與軟件工程 2019年10期
徐盟


摘要:根據直升機旋翼錐體和動平衡維護工作的重要性,錐體的調整比較直觀,而動平衡的調整比較復雜,依據多年來外場的手工畫圖調整經驗,總結出了一套計算方法,因此創建了某型直升機的槳葉動平衡調整算法;節省了動平衡調整的時間與次數,同時也節省了人力資源與直升機的損耗;提高了調整的精度,使振動值降至允許范圍的50%以內(小于0.1IPS)。同時為了滿足外場調整需要,將調整步驟以及算法加載到4.8寸工業觸摸屏與AVR單片機內,無任何調整經驗的操作者均可將旋翼動平衡值快速準確的調整至允許范圍。
[關鍵詞]旋翼動平衡配重Arduino
1前言
無人直升機沒有駕駛員,無法通過人體感受機身的振動,如果忽視了旋翼動平衡調整,.會造成無人直升機大部分附件呈現疲勞狀態,縮短了部件的使用壽命,增大了能耗,從而提升了維修成本,甚至可能激發共振;因此每次進行旋翼和傳動系統的改裝后必須進行旋翼的動平衡值檢查。AV500系列無人直升機主旋翼為2片槳葉,尾旋翼為2片槳葉,其旋翼動平衡調整分為錐體調整和動平衡調整。錐體調整則通過調整對應槳葉的變距拉桿來完成。動平衡調整則通過在槳葉上增減配重片的方法來實現,需要進行計算。根據測試設備得出的振動值與相位,再利用初始振動、試重和加重后振動組成的矢量關系算法,并結合4.8寸工業觸摸屏的簡單界面操作即可完成動平衡調整。
2動平衡調整原理及步驟
近年來無人機直升機飛速發展,但國產的動平衡調整設備仍然比較欠缺,在測量振動情況的基礎上如何給出高效準確的調整方法仍是有待進一步研究的課題。目前以Vibrex2000為代表的通用型動平衡測量儀只能得到動平衡的幅值和相位,無法給出調整建議,維護人員一般根據工作經驗,得到相應槳葉的配重增減的情況,具有一定的盲目性。
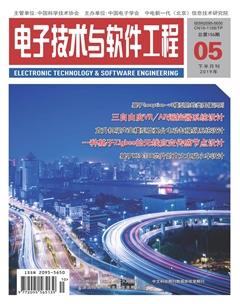
動平衡調整的實質是矢量問題,需要將測得的振動值降到0.2IPS以下,實際計算中一般將目標振動值設為0來計算,因為其它各方面因素的影響,要達到0幾乎是不可能的。由于配重只能在槳葉,上增加,則有了配重質量的方向限制,因此需要引入矢量的概念,需要在槳葉方向上進行矢量分解,分解的矢量大小可利用三角函數計算方法以及列出二元二次方程進行求解得到。主旋翼的動平衡調整如下圖1所示,從下往上看旋翼為順時針旋轉方向。由于主槳葉為2片且只有4個點加載配重,而且其中的2點之間的夾角很小,為了方便矢量分解,建立的槳葉十字盤模型,分別為目、目左、非目、目右,如圖1所示。
以某次主槳動平衡調整為例進行說明,首次開車測得動平衡值為圖2中A點,在目標槳葉上增加質量為m的配重片之后,再次開車測得動平衡值為圖2中B點,將A點與B點連接得到線段AB。如圖2所示。
由于在目標槳葉上增加了質量為m的配重片導致了振動點A轉移到了點B,且線段AB的長短正比于質量m的大小,經過計算可以得到單位長度IPS對應配重片質量的關系,如式(1)所示:
因為我們只在目標槳進行了加載,由此可以得出目標槳葉的坐標系,目標槳平行于線段AB;由于其它的槳葉與目標槳的關系已知,則可建立十字盤槳葉坐標系。
在實際調整過程中,如圖3所示,第一次測得振動值為A點,我們的調整目標是沿著線段AO來調整的,由于圖中槳葉坐標系可知直接使振動方向走AO是無法做到的,因此將AO線段相對于槳葉坐標系進行矢量分解為Aj與Ak,則需要在目左與目標槳葉上增加相應的質量:
對于尾槳為2片槳葉的動平衡調整原理和上述2片主槳葉坐標系的建立方法一樣,由于槳葉只有2片,旋翼質量小且轉速高,但是加載點有4個,4個加載點為對稱布置,因此我們建立的與主槳葉相同的坐標系,矢量分析計算方法與主槳葉一樣。
在1號和2號點上增加相同的配重時可以實現沿著目標槳方向的調整,在2號和3號點上增加相同的配重時可以實現沿著目右槳方向的調整,接下來的矢量分解調整方法就可以參考主槳的旋翼平衡調整方法了。現在算法已經清楚了,接下來就是用軟件來實現了。
3Arduino開發板與Nextion工業觸摸屏
動平衡輔助計算程序采用Arduino平臺開發,Arduino是一款便捷靈活、方便上手的開源電子原型平臺。它構建于開放原始碼simpleI/O介面版,并且具有使用類似Java、C語言的Processing/Wiring開發環境。主要包含兩個的部分:硬件部分是可以用來做電路連接的Arduino電路板;另外一個則是ArduinoIDE,你的計算機中的程序開發環境。你只要在IDE中編寫程序代碼,將程序上傳到Arduino電路板后,程序便會告訴Arduino電路板要做些什么了。
Nextion工業觸摸屏是一套由單片機或HMI帶控制器的顯示方案,顯示方案中的通訊部分由串口通訊,TTL和RS232等通訊接口;它由顯示驅動板、外殼、電容觸摸顯示屏三部分構成。發送與接收用戶單片機串口間的指令。選擇Nextion具有以下優點:
(1)使用字符串指令;用于與單片機發送與接收動平衡值中的IPS與相位值。
(2)數據結構精簡;字符串指令加上結束符即可實現。
(3)產品使用C語言指令;Arduino開發板使用同樣的C語言,開發更方便。
(4)支持控件屬性賦值支持簡易運算;部分計算可以在觸摸屏內完成,節省了Arduino開發板的內存空間。
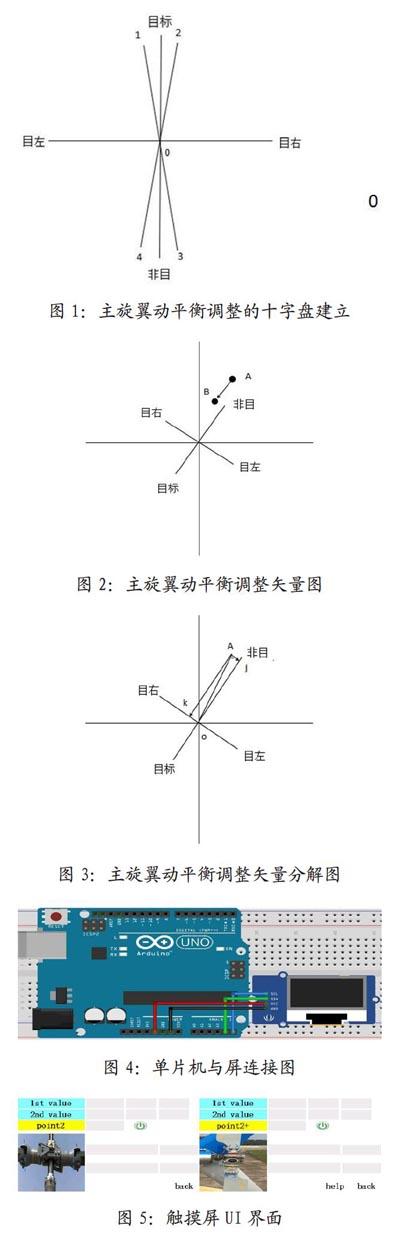
(5)支持各類通訊接口;與單片機通訊只需2根引線,將觸摸屏的接收與發送連接至單片機的發送與接收端。如圖4所示。
(6)供電方式采用5伏直流電源即可驅動,與單片機供電相同,可共用一個電源。
如圖5所示,觸摸屏界面的設計,不僅僅是創造漂亮的圖像;站在用戶的角度對目標和行為有了更好的理解后,將UI界面設計得簡潔,減小占用的內存空間,點擊圖標直接進入主程序,操作簡便,用戶只需輸入2次測得值和一次加載值后,點擊按鈕事件,結果便顯示在標簽上。
4試驗驗證
(1)在某型直升機在試驗改裝后需進行動平衡檢查與調整,第一次測得初始值為0.12,在黃色槳葉上加了99.1g配重后,第二次測得值0.13,操作人員打開手機APP,把值輸入相應文本框中,點擊按鈕,即可得到調整結果為0.01,滿足試驗要求;此次驗證了該算法在低振動值狀態下的準確性。如圖6所示。
(2)AV500無人直升機在某次改裝后需進行尾槳動平衡檢查。
如表1所示,在每次開車測值過程中,均測試三次值,取相位適中的那個值作為計算值,由于各種規格配重片質量的限制,導致實際所加載的配重質量無法和計算給出的質量相一致,在配重在加載時盡量保證差值小于0.2g。
若槳葉上有超過2個加載點有配重的情況下,按如下例子所示操作:
例如:1號點10g,2號點8g,3號點4g,4號點2g,如圖7(上)所示;1號點和3號點可以同增減配重,2號點和4號點可以同增減配重。進行增減后如圖7(下)所示。1號點8g,2號點4g,3號點0g,4號點0g。
錯誤是可以避免的,誤差不可以避免,做得再精確的動平衡測量設備都是有誤差的,因此我們在測值時盡可能保證以下幾點:
(1)外場風速小于7m/s,直升機迎風停放。
(2)兩次測得值的相位時鐘差距在10分鐘以內。
(3)兩次測值之間如有錐體調整情況,該振動值不在程序計算要求范圍內。
如上述原理及操作步驟,使得動平衡調整難度大大降低,即使新手也能操作完成,同時提高了調整精度,減少了調整時間,節省人力物力財力;為直升機后續執行任務爭取了寶貴的時間。
5總結
本文將動平衡調整算法集中在單片機與觸摸屏實現,應用在AV500無人直升機平臺上,充分驗證了算法的可靠性、準確性;并且操作簡單,有效降低動平衡調整的盲目性,提高工作效率,有效的降低了直升機的開車次數,節省系統壽命。對于裝載三片,五片槳葉直升機的動平衡調整都具有很大的發展空間。
參考文獻
[1]AV500無人直升機維護手冊.
[2]APPinventorII使用手冊。
[3]Chadwick-HelmuthCompany,Inc.VIBREX2000USERGUIDE,August31,1998[EB/0L].
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
電子制作(2017年19期)2017-02-02 07:08:27