基于機器視覺的新型降噪水下生態調查機器人
2019-07-20 13:24:35馬鳳瑞曾奕淇楊帆王憶麟魯奇欣
電子技術與軟件工程 2019年10期
關鍵詞:設計
馬鳳瑞 曾奕淇 楊帆 王憶麟 魯奇欣

摘要:本文研究設計了一種新型微降噪水下生態調查機器人,以水滴型流線設計為運載器艙體,通過六個螺旋槳推進器協作運行實現航行器在水下的全自由度運動。本文使用機器視覺來獲取目標信息,基于自動白平衡的視頻去霧算法與目標識別技術,經試驗驗證,該方法能夠減小水下可視圖像退化的影響,識別被觀測物種。
[關鍵詞]水下機器人平衡閉環控制算法機器視覺
為了保證水下跟拍機器人的穩定性,本文采用了類似四旋翼空中無人機的推進器布局來保持水下機器人的姿態穩定性,并采用平衡閉環控制算法,樹莓派將傳感器測得的信號和反饋信號經過控制器處理后,與上位機給出的命令疊加,并進行動力分配,通過向電機傳送PWM信號來調節各個電機的轉速,以此讓機器人能夠進行對外界干擾的補償,且實現水下機器人航向、姿態、深度的穩定調節,保證水下拍攝的穩定性。
1艙體設計
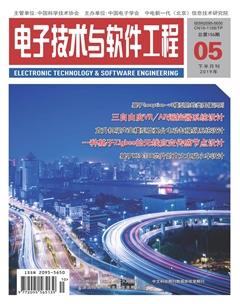
本文使用ICEMCFD進行模型建模,在計算機中建立水滴模型后,再使用Fluent18.0進行流場仿真。選用Laminar層流模型模擬小雷諾數下水滴形相較于圓形對于流場速度分布,以及壓強分布的影響,并在2Dspace下進行靜態分析處理。如圖1所示。
根據上述仿真結果,發現選用水滴形將受到更小的流體阻力,故該設計可行。
在驗證水滴模型的可行性后,本文使用Proe設計水滴形艙體。設計水深為淺水,最深下淺深度10m,根據水深壓強公式:
P=pgh(p=l000kg/m,g=10m/s",h=10m)可知,水下10m內的相對壓強為0.1MPa,絕對壓強為2atm。壓強不算大,結構體受力不大的情況下,主要考慮艙體密封問題。考慮成本以及密封效果,選用法蘭連接配合O型圈密封的方案。
為了便于控制,選擇使用類似無人機的四旋翼結構,用來控制機體的水平以及機體的穩定性;同時配合兩個水平推進器為艙體提供水平方向更強的推動力。
2動力驅動
針對水下航拍器的動力驅動問題,考慮到在識別水下生物的同時不打擾到其正常作息,固對螺旋槳進行了一定的降噪設計。由于螺旋槳是在非均勻流場中工作,所以不可避免的會出現非定常空泡現象。空泡不僅會引起機器人尾部的震動,而且會引發噪音,是水下機器人最主要的噪音源之一,它還會造成槳葉空泡剝蝕,降低螺旋槳的使用壽命。
針對螺旋槳噪音產生的主要來源一空泡,并且采用的螺旋槳尺寸較小是B型,我們確定了B系列螺旋槳空泡校核的方法.對該系列的螺旋槳,要求伸展盤面比EAR要滿足以下公式:
結合設計參數,對其進行3D建模過程,確定二維坐標到三維坐標的轉換方法:
3圖像處理
水下圖像由于低對比度、紋理模糊、色彩失真、光照不均,視野較小等原因難以利用,這種現象叫做圖像退化。首先進行圖像預處理:
第一步,讀取視頻流,并逐幀對其進行操作。在圖像處理時,為了消除圖像中的噪聲,通常對其進行開運算,即先進行圖像腐蝕再進行圖像膨脹。因為腐蝕雖然會去掉噪聲點,但也會使前景對象變小,所以再對其做膨脹處理。
第二步,在完成開運算操作后,使用雙邊濾波來在減少噪聲,平滑圖像的同時保持物體的邊緣。
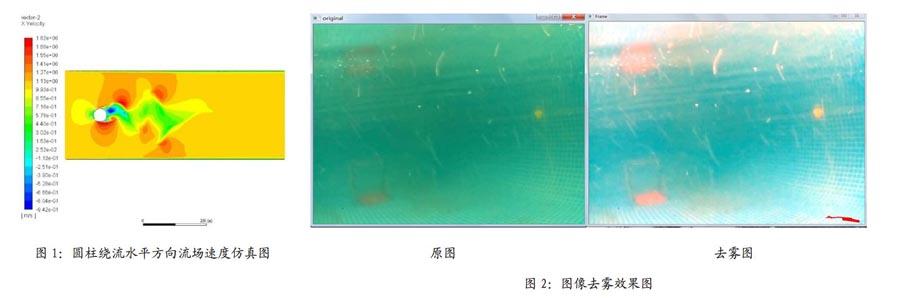
預處理結束后,利用自動白平衡算法對圖像進行去霧處理。為了讓測試結果更直觀,本文設計了旨在識別紅色物體并畫出其軌跡的功能試驗,其結果如圖2。
4結論
本研究外形設計基于流體流動基本方程原理,利用流體連續方程及流體動量方程進行計算。運用層流不可壓縮流體理論,使用Laminar層流模型,在2DSpace進行靜態分析,分析外形設計的可行性。上述過程的建模部分通過ICEMCFD18.0實現,流體仿真運用Fluent18.0實現,并將可行的方案使用Proe進行三維建模。
參考文獻
[1]王奉明.水滴形擾流元的設計和性能研究[D].南京:南京航空航天大學,2005.
[2]吳丙偉.淺水觀察級ROV結構設計與仿真[D].青島:中國海洋大學,2013.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04