基于滑模控制理論的前向追蹤制導(dǎo)律研究
2019-07-24 09:49:06李慧
商品與質(zhì)量 2019年8期
李慧
中興通訊股份有限公司天津分公司 天津 300300
三相永磁同步電機(以下簡稱PMSM)是一個強耦合、多變量的非線性復(fù)雜系統(tǒng),具有體積小、效率高、可靠性強等優(yōu)點,在許多高精度控制場合被廣泛應(yīng)用。目前PMSM調(diào)速大都采用PI調(diào)節(jié)器進(jìn)行控制,但是當(dāng)電機內(nèi)部參數(shù)發(fā)生變化或者有外部擾動時,傳統(tǒng)的PI控制算法難以實現(xiàn)理想的高精度的調(diào)速要求。因此,PMSM的控制系統(tǒng)中應(yīng)用了許多效果優(yōu)異的非線性控制方法,其中包括滑模控制、預(yù)測控制、魯棒控制、自抗擾控制等。
1 前向追蹤攔截模型
圖1是前向追蹤攔截方式的彈目運動關(guān)系圖。圖中T和M分別為目標(biāo)和導(dǎo)彈,vt和vm分別為目標(biāo)和導(dǎo)彈的速度,α和β分別是vt和vm與水平線的夾角,r是彈目距離矢量,方向從T到M,q是彈目視線角,θ和δ分別是vt和vm與彈目視線的夾角。
2 模糊自適應(yīng)滑模控制器
2.1 改進(jìn)的冪次指數(shù)趨近律滑模控制性能分析
以形如式(10)的控制系統(tǒng)為例,對改進(jìn)的冪次指數(shù)趨近律滑模控制性能進(jìn)行分析,設(shè)系統(tǒng)狀態(tài)方程為{x?1=x2x?2=-25x2+133u+0.1sint(18)選取系統(tǒng)參數(shù)ε=5,k=10,α=0.3,β=1。分別選取距離平衡點較近的初始狀態(tài)[0.5,-0.5]T和較遠(yuǎn)的初始狀態(tài)[10,-10]T2種情況,將指數(shù)趨近律(EALSMC)與改進(jìn)的冪次指數(shù)趨近律(IPEALSMC)仿真對比。仿真結(jié)果如圖2和圖3所示。仿真結(jié)果表明:1)在距離平衡點較近的初始條件下采用改進(jìn)的冪次指數(shù)趨近律,控制信號輸入抖振降低約80%,滑模運動軌跡更平滑,控制性能提升明顯。2)在距離平衡點較遠(yuǎn)的初始條件下,后者控制信號輸入抖振也能明顯降低。因此,改進(jìn)的冪次指數(shù)趨近律滑模控制策略能保證系統(tǒng)有限時間內(nèi)到達(dá),克服距離平衡點較近時,指數(shù)趨近律作用下系統(tǒng)運動點呈帶狀滑模運行的缺點,降低控制器負(fù)擔(dān),提高系統(tǒng)性能[1]。
2.2 模糊自適應(yīng)滑模控制器的設(shè)計
模糊滑模控制器能柔化控制信號,對控制對象參數(shù)變化適應(yīng)力強,能實現(xiàn)參數(shù)的自適應(yīng)調(diào)節(jié)。在保證滑模存在和到達(dá)條件的情況下,本文實現(xiàn)對改進(jìn)的冪次指數(shù)趨近律參數(shù)ε和k在線調(diào)整。為滿足運行期間電機參數(shù)變化及干擾作用存在條件下對系統(tǒng)穩(wěn)定性的要求,本文設(shè)計二維模糊控制器,設(shè)模糊自適應(yīng)滑模控制器的輸入信號為轉(zhuǎn)速誤差e及其導(dǎo)數(shù)de/dt,輸出信號為趨近律參數(shù)ε和k。輸入變量與輸出變量的模糊子集為{負(fù)大,負(fù)中,負(fù)小,不變,正小,正中,正大},即{NB,NM,NS,ZO,PS,PM,PB},并量化在(-3,3)區(qū)域內(nèi)。隸屬度函數(shù)選取為高斯函數(shù),且模糊子集的每個值所取的范圍寬度相等。
3 仿真與分析
基于機動目標(biāo)攔截設(shè)計的制導(dǎo)律必須能攔截非機動目標(biāo)。在目標(biāo)機動情況下,正弦機動是目標(biāo)常見的逃逸方式,本文設(shè)定目標(biāo)以非機動飛行和以5g的最大機動能力做正弦機動逃逸2種情況,利用上文所設(shè)計的制導(dǎo)律進(jìn)行攔截,并分析其導(dǎo)引品質(zhì)。設(shè)置初始條件:攔截彈位置(2000,800),速率1200m/s,俯仰角60°;目標(biāo)位置(0,0),速率1600m/s,俯仰角30°。圖2~3顯示了目標(biāo)非機動和機動情況下的視線角變化率。從圖2可以看出,當(dāng)目標(biāo)非機動飛行時,視線角變化率逐漸變小,最終趨近為0。而在攔截機動目標(biāo)時,視線角變化率會產(chǎn)生震蕩,這是因為目標(biāo)的周期性機動變化;圖3顯示,視線角變化率的震蕩幅度逐漸變大,這是因為在攔截過程中,彈目距離逐漸變小。
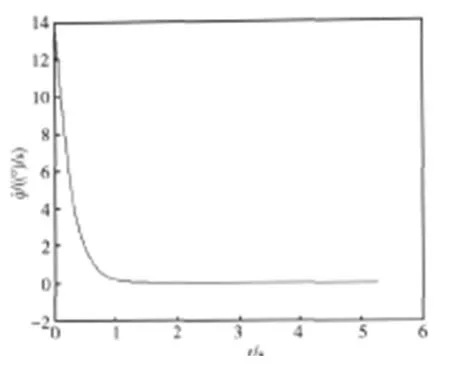
圖2 視角角速度變化(目標(biāo)非機動)
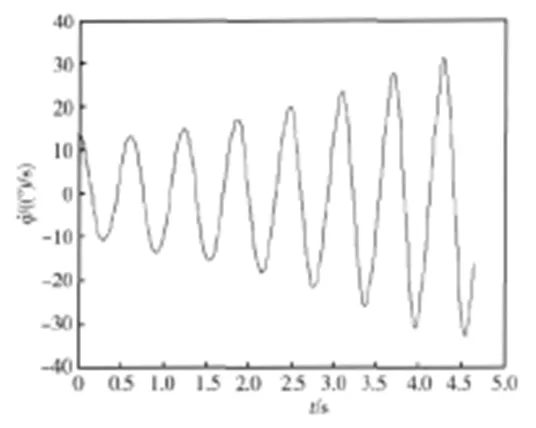
圖3 視角角速度變化(目標(biāo)機動)
4 結(jié)語
前向追蹤攔截制導(dǎo)律能用低速攔截彈攔截高速目標(biāo),由此解決了攔截高超音速目標(biāo)的攔截彈能量、紅外導(dǎo)引頭精度等問題。本文從脫靶量的角度出發(fā),研究了前向追蹤攔截方式的一種制導(dǎo)方法,即以脫靶量為滑模面,使系統(tǒng)逐漸趨近于零脫靶量,這樣就克服了其它前向追蹤攔截制導(dǎo)律對目標(biāo)速度矢量變化的敏感性。由于對目標(biāo)的機動加速度及其變化率進(jìn)行了估計,該制導(dǎo)律適合攔截作復(fù)雜機動目標(biāo)的攔截。仿真表明,該制導(dǎo)律不只在攔截非機動目標(biāo)時能取得理想的攔截效果,也能對機動目標(biāo)的攔截具有高精度、低過載等良好品質(zhì)[2-3]。
