基于Matlab/Simulink船舶電力系統建模與仿真
2019-07-25 01:20:10鄭恒持王孫清
船電技術 2019年7期
鄭恒持,王孫清,招 聰,張 煒
?
基于Matlab/Simulink船舶電力系統建模與仿真
鄭恒持,王孫清,招 聰,張 煒
(中國船舶科學研究中心,江蘇無錫 214082)
為了提高船舶電力系統的可靠性和穩定性,保證船舶在各種狀態下實現功率的最優化配置,利用模塊化的建模方法,建立了柴油機及調速分系統模型、發電機及勵磁分系統模型、同步發電機并車控制模塊模型、發電機組控制模型。在Matlab/Simulink仿真環境中對船舶電力系統的典型運行工況、常見故障工況以及并車操作進行了仿真研究。仿真結果表明,所建立模型能比較準確地反映船舶電力系統實際運行的情況,同時可以避免在實船上進行工況試驗和故障測試的高成本、高危險。其數據結果對船舶電力系統的設計、調試及控制方法的研究具有重要參考意義。
船舶電力 仿真 Matlab/Simulink
0 引言
船舶電力系統由發電系統、配電系統、電力網、電力負載四部分組成[1]。利用模塊化的建模方法,在Matlab/Simulink仿真環境中建立了柴油機及調速分系統模型、發電機及勵磁分系統模型、同步發電機并車控制模塊模型、并將轉速控制模塊和勵磁控制模塊結合起來,構成發電機組控制模塊。通過分析不同擾動下系統狀態參數的變化情況,對船舶電力系統進行研究。
1 船舶電力系統仿真模型建立
1.1 船舶柴油機及其調速系統模型
通過二階模型對船舶柴油機及其調速系統進行組合建模[2]。將實際轉速與設定轉速作差后送入主控制單元,主控制單元與放大單元結合在一起,構成比例微分加二階慣性的控制單元。柴油機的輸出轉速經積分作用變為轉矩,最后將該轉矩與轉速相乘得到功率信號。其傳遞函數如公式(1),在Matlab/Simulink仿真環境中建立仿真模型如圖1所示。

1.2 勵磁系統模型
參照IEEE推薦的勵磁系統模型,建立可控相復勵無刷交流勵磁系統數學模型[3]。
1)相復勵裝置的數學模型

2)電壓差數學模型
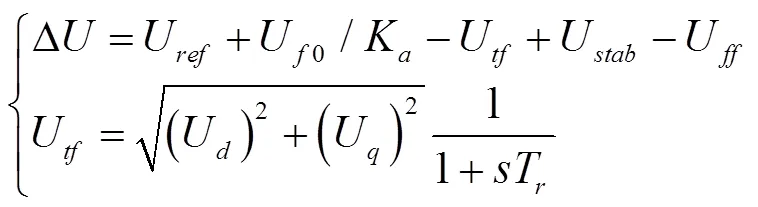
3)補償器的數學模型
外部驗證。對新考察的①萘、②苯甲酸甲酯、③苯甲酸乙酯、④苯乙酮、⑤二苯醚、⑥肉桂醇、⑦溴苯、⑧苯甲酸芐酯8種有機物,使用高效液相色譜實驗測定正辛醇/水分配系數,使用上述軟件計算6項參數。參數計算值、響應預測值、實驗值見表2。
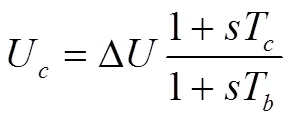
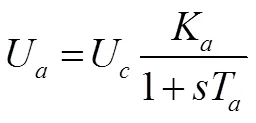
4)放大器的數學模型
5)比例飽和環節的數學模型
6)交流勵磁機的數學模型
7)反饋環節的數學模型
綜上七個環節,在Matlab/Simulink仿真環境中搭建同步發電機可控相復勵無刷交流勵磁系統的仿真模型,如圖2所示。
1.3 同步發電機組模型
柴油機的輸出轉速與同步發電機組的輸出端電壓是一對相互耦合的變量[4]。所以,可以將柴油機的調速系統與同步發電機的勵磁系統耦合起來,組成同步發電機組控制系統仿真模型。
為了更真實的模擬船舶電力系統中同步發電機組單元,采用Matlab/Simulink仿真環境中標幺制下的同步發電機標準模型(Synchronous Machine pu Fundamental)與發電機組控制模型相結合[5],構成船舶電力系統發電機組單元模型。
其中,W為柴油機轉速設定值,V為勵磁電壓參考值,是控制系統的綜合輸入端,P為原動機輸出的機械功率,V為發電機勵磁電壓,V為發電機輸出端電壓,為發電機轉速。
1.4 船舶電力系統整體仿真模型
建立船舶電力系統整體仿真模型,如圖1所示。這是一個雙機帶負載并聯運行的仿真模型,由主開關(Switch)控制每臺發電機組并網或脫網,通過主配電板向電動機及靜態負載供電。模型中同時設有電壓、電流檢測模塊,對需要的電壓、電流進行檢測,并通過示波器進行顯示;還有故障設置模塊(Three-phase Fault),可對常見的故障進行設置。
2 電力系統典型運行工況仿真
為確保航行的安全性,需要電力系統具有良好的穩定性。為了驗證所建模型的正確性,對發電機組空載啟動、單機投切靜態負載以及單機投切電動機三種典型工況進行仿真試驗。
2.1 發電機組空載啟動仿真
通過一號發電機組的空載啟動試驗,來檢測柴油機的調速性能。
仿真過程:斷開主開關Switch1、Switch2,當啟動條件具備,發電機組空載啟動。由圖2可以看出,隨著柴油機的輸出機械轉矩P的增加,發電機轉速逐漸上升并開始建立電壓,4s左右發電機轉速達到額定值,其額定空載轉速略高于其額定轉速,符合實際情況。勵磁電壓V在端電壓V為零時很大,隨著電壓的逐漸升高而慢慢減小,最終穩定在一個定值。

圖1 船舶電力系統整體仿真模型

圖2 空載啟動過程中發電機參數
2.2 單機投切靜態負載仿真
單臺發電機組帶1/3的額定靜態負載穩定運行,然后依次加1/3額定靜態負載,滿負荷穩定運行后卸掉新加的負載,觀察發電機組參數變化。
由圖3知,開始時電力系統穩定運行,2 s時突加負載,電網電流增大,發電機輸出功率加大,轉速降低,勵磁系統進行調節,加大勵磁電壓,使得發電機端電壓逐漸回升,調速系統也開始工作,轉速逐漸恢復;同理8 s時繼續加負載,勵磁電壓、端電壓以及速度調節過程上個過程相同;14 s時切除新加的兩個負載,發電機組及電網各參數的變化與加載時相反。
2.3 單機投切異步電動機仿真
異步電動機是重要的動力負載,其投切過程也直接影響著電力系統的穩定性。尤其是當異步電動機的功率與同步發電機容量相當時,其影響更加顯著[5]。
仿真過程:電機帶功率因數為0.8的阻感性負載穩定運行,4 s時突加異步電動機,10 s切掉異步電動機負載。仿真結果如圖4所示。
由圖4可知,異步電動機投入運行時,原動機輸出功率大幅增加,發電機轉速稍有下降,端電壓出現波動,勵磁系統迅速投入調節,切除異步電動機調節過程相反。
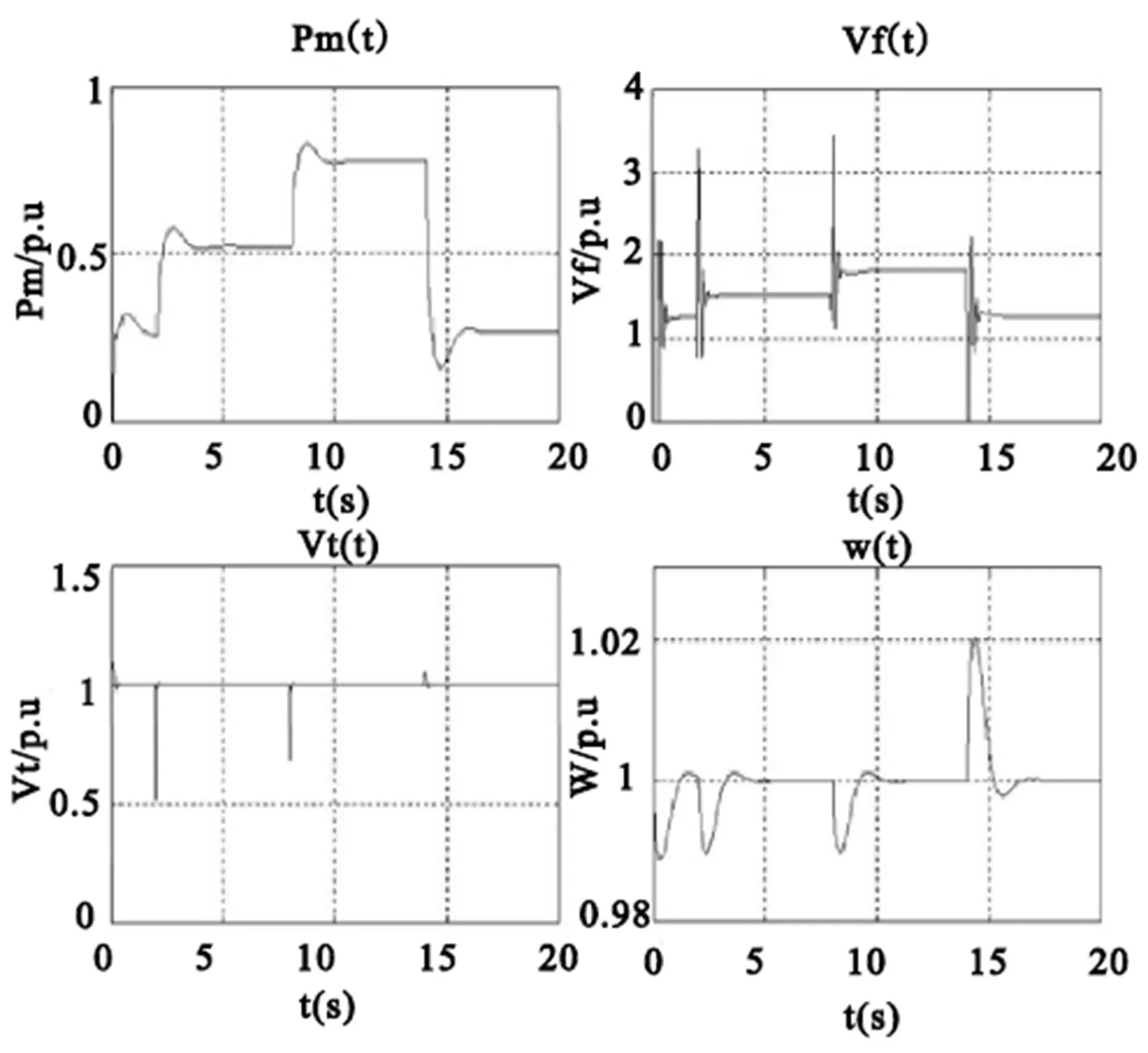
圖3 電站投切靜態負載時發電機參數
3 典型故障仿真試驗
船舶電力系統的故障一般包括兩種:電網故障和發電機組故障[6]。
3.1 電網故障仿真
電網A相發生接地故障時,電網電阻劇減,電網電流突增;因為電磁功率正比于電流與電壓的乘積[7],所以發電機輸出的電磁功率會增加,導致其電磁力矩也增加。
圖4 電站投切異步電動機時發電機參數
在t=4 s時A相發生短路故障,原動機輸出的機械功率突增,發電機轉速下降,發電機端電壓會產生波動,勵磁系統為了保持端電壓恒定會進行自動調節。故障期間電網A相電流大幅增加,B、C兩相電流也有所上升;A相電壓接近0,B、C兩相電壓增大。0.5 s后,發電機主開關跳閘,發電機空載運行,發電機輸出端電壓為空載電壓,電網電壓為零,整個過程結束。
3.2 發電機組故障跳閘仿真
發電機組故障跳閘最容易導致全船失電。一旦出現故障跳閘,電力系統必須及時作出響應。而柴油機的反應時間相對較長,因此,在研究發電機組跳閘時,要著重考慮柴油機的加載特性和反應時間[8]。
1)發電機組低負荷運行
圖5為發電機組低負荷運行時單機跳閘的仿真結果。故障前:1、2號發電機組并聯運行,各帶55%的額定負荷。在第4 s的時候,2號發電機組故障跳閘,1號發電機組迅速升到110%額定負荷而過載。此時,1號發電機組頻率開始減小,在6.4 s時,頻率減少到規定的最低值54 Hz[9]。此刻切除2號發電機組跳閘前所承擔的全部負載量,從而降低1號發電機所承擔的負載,使其頻率逐漸回升。
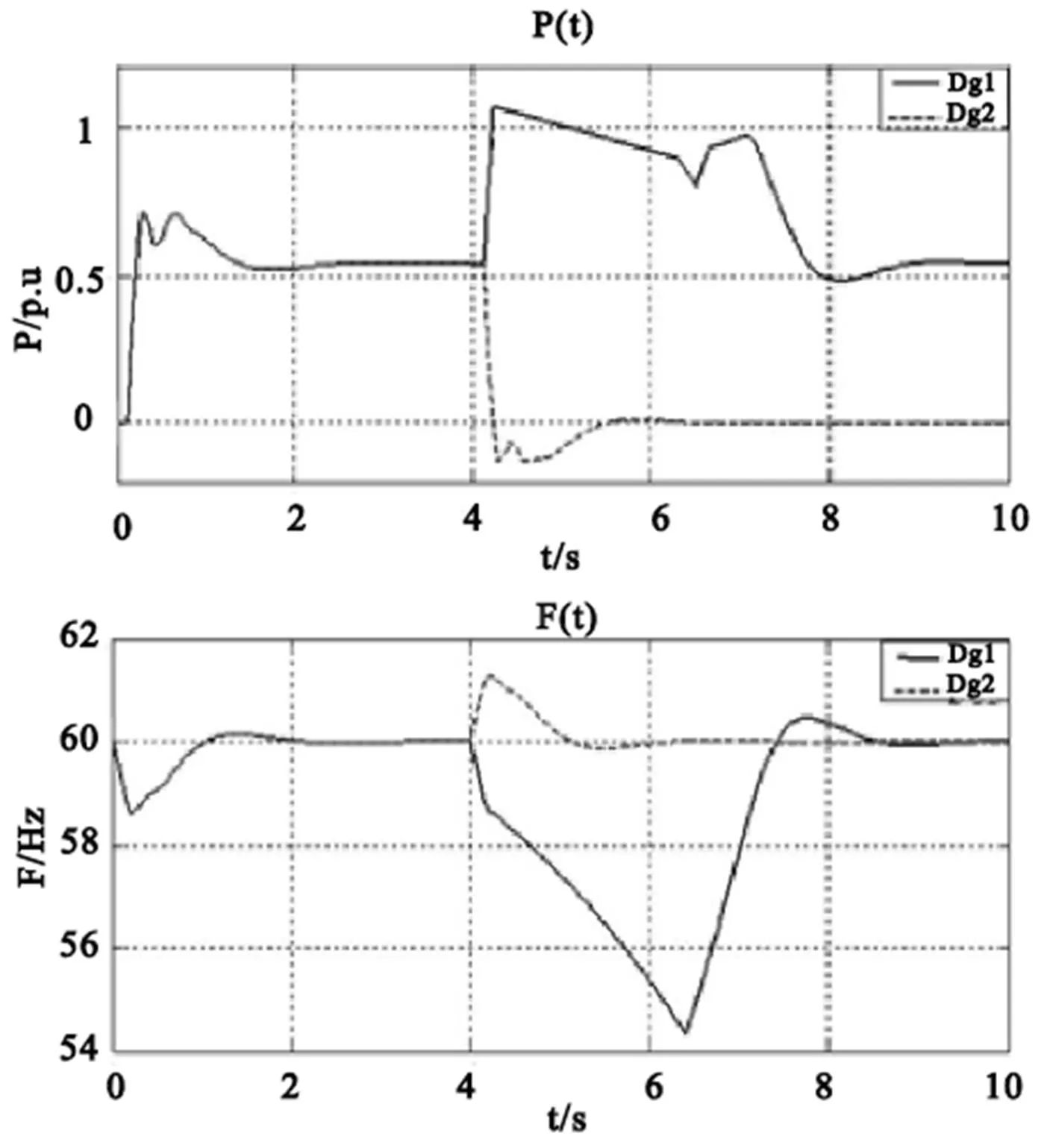
圖5 低負荷時發電機組跳閘功率及頻率變化曲線
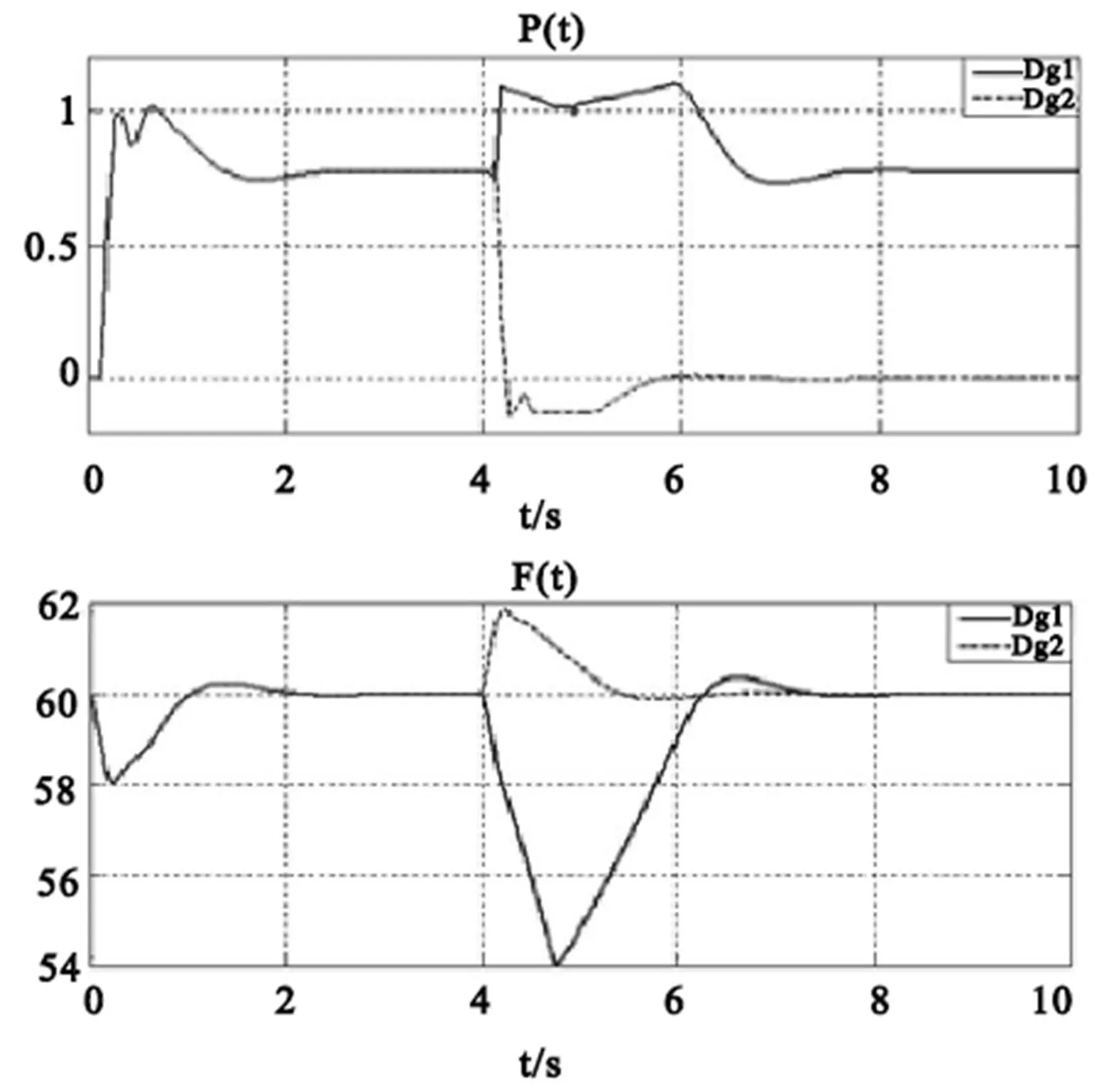
圖6 高負荷時發電機組跳閘功率及頻率變化曲線
2)發電機組高負荷運行
圖6為兩臺機組高負荷運行時,1號發電機組突然跳閘的仿真結果。故障前:雙機并網運行,各帶80%的額定負荷,在第4 s的時候,2號發電機組突然跳閘,1號發電機組所承擔的負荷迅速上升,達到110%的負荷時過載。此時電網頻率急劇下降,大約0.75 s后,降低到最低值54 Hz。除去故障前2號發電機組所承擔的全部負載量,從而使得1號發電機承擔的負載有所減少,進而使其頻率回升。
將圖5和圖6中曲線進行對比,可以看出,當雙機并聯運行時,發電機組的負荷越高,一臺機組發生跳閘故障時,另一臺機組頻率下降的越快,安全反應時間越短,對電力系統的故障反應要求越高。
4 結語
在MATLAB/Simulink環境下建立了某船舶電力系統仿真模型,對幾個典型工況及故障進行了仿真研究。結果表明,工況及故障仿真可以獲得電力系統電氣參數的變化,通過對結果進行分析,對于提高船舶電力系統供電可靠性及系統的設計、調試及控制方法的研究具有重要參考意義。
[1] 王滿, 王浩亮. 船舶電力系統仿真[J]. 大連海事大學學報(自然科學版), 2011, 37(1): 35-38.
[2] 鄭恒持. 船舶中壓電力系統建模與仿真[D]. 大連: 大連海事大學, 2017.
[3] 李宗澤, 史成軍. 基于二維云模型同步發電機PID勵磁系統仿真[J]. 電力系統保護與控制, 2016, 44(7): 19-24.
[4] Yi Ming Li, Yue Bin Wang, Quan Feng Yan, et al. Modeling and simulation of asynchronous motor in αβ coordinate system based on Matlab. Advanced Materials Research, 2013.
[5] 施偉鋒, 許曉彥. 船舶電力系統建模與仿真[M]. 北京: 電子工業出版社, 2012.
[6] 孫才勤. 船舶電力系統建模仿真及動態穩定性研究[D].大連: 大連海事大學, 2010.
[7] 劉雨, 郭晨, 孫建波等. 船舶電力系統的動態過程仿真研究[J]. 系統仿真學報, 2009, 21(9): 2791-2795.
[8] 王勇. 電力系統運行可靠性分析與評價理論研究[D]. 濟南: 山東大學, 2012.
[9] 中國船級社.鋼制海船入級規范[S]. 北京: 人民交通出版社, 2009.
Modeling and Simulation of Marine Voltage Power System Based on Matlab/Simulink
Zheng Hengchi, Wang Sunqing, Zhao Cong, Zhang Wei
(China Ship Scientific Research Centre, Wuxi 214082, Jiangsu, China)
U665
A
1003-4862(2019)07-0020-05
2019-01-07
鄭恒持(1990-)男,工程師。研究方向:船舶電力系統設計。E-mail: 602242643@qq.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
電力工程技術(2014年1期)2014-03-20 14:19:06