六相永磁同步電機驅動控制方式
2019-07-31 09:37:44匡曉霖徐金全黃春蓉李嘉科郭宏
北京航空航天大學學報 2019年7期
關鍵詞:系統
匡曉霖,徐金全,黃春蓉,李嘉科,郭宏
(1.北京機械設備研究所,北京100854; 2.北京航空航天大學 自動化科學與電氣工程學院,北京100083;3.中國人民解放軍駐航天科工集團第二研究院二〇六所軍代室,北京100854)
多電/全電化是未來飛機的重要發展方向,其通過簡化機載二次能源以提高能源利用率,降低飛機的重量成本。隨之,機載多能源作動系統也逐漸被單一電力作動系統替代[1-4]。作為電力作動系統的主要形式之一,機電作動器以其小型化、高效率、高功率密度及良好的動態性能等優點,受到廣泛關注[5-7]。
為提高機電作動器的可靠性,其伺服永磁同步 電 機 (Permanent Magnet Synchronous Motor,PMSM)常采用多相結構以保證系統具有容錯能力。按照驅動控制方式的不同,多相結構的永磁同步電機系統可分為余度永磁同步電機系統和容錯永磁同步電機系統2類[8-11]。余度永磁同步電機系統是基于傳統三相永磁同步電機系統提出的,其定子繞組由多套三相繞組按照一定的空間結構排列構成,采用三相橋逆變器驅動方式,控制策略簡單[12-15]。若某相繞組發生故障,則退出故障所在的整套三相繞組,故障前后電機均保持對稱運行。容錯永磁同步電機系統以每相繞組為基本單元,采用H橋逆變器驅動方式,發生故障時僅需退出故障相,故障后電機系統不再保持對稱運行[16-18]。與余度永磁同步電機系統相比,相同相數的容錯永磁同步電機系統具有更高的容錯能力和繞組利用率,但同時也帶來了驅動控制器體積質量更大、控制策略更復雜的問題。目前,對于2種多相永磁同步電機系統運行性能差異的研究較少,局限在起動性能、輸出轉矩、不平衡磁拉力等方面,而且采用了完全不同的電機系統[19-20]。不同驅動控制方式對多相永磁同步電機運行性能的影響尚不明晰,有必要開展進一步的研究工作。
本文基于一個六相永磁同步電機,分別構建成雙三相余度永磁同步電機和六相容錯永磁同步電機2種電機驅動控制系統。在此基礎上,通過仿真分析和實驗研究了不同驅動控制方式對六相永磁同步電機調速范圍和動態性能的影響機理及影響規律。
1 六相永磁同步電機系統模型
1.1 電機數學模型
本文所研究的六相永磁同步電機為12槽10極結構,如圖1所示。其六相繞組分別為A、B、C、D、E、F,各相繞組依次相差60°機械角度排列。為簡化分析過程,對電機作如下假設:
1)定轉子產生的氣隙磁場均按正弦分布,忽略各次諧波。
2)忽略鐵心磁飽和及磁滯、渦流的影響。
3)定子六相繞組對稱,轉子對直軸和交軸對稱。
4)忽略繞組互感的影響。
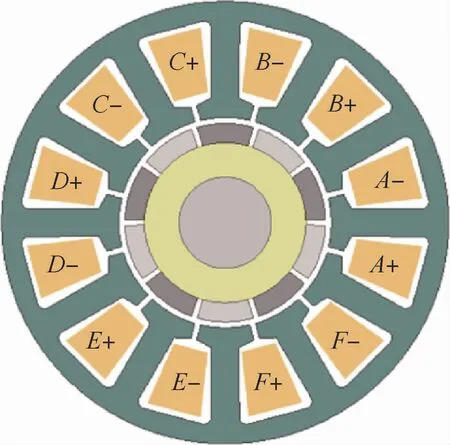
圖1 六相永磁同步電機定轉子結構Fig.1 Stator and rotor structure of six-phase PMSM
根據上述假設條件,利用電路和電磁感應原理可以得到電機定子繞組的電壓方程和磁鏈方程分別為

式中:
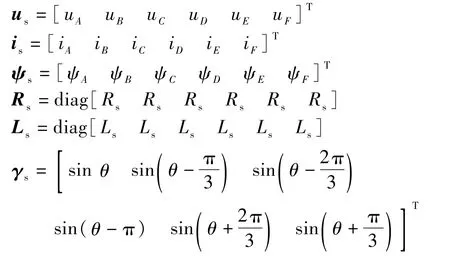
其中:us、is和 ψs分別為六相繞組的相電壓、相電流和相磁鏈矩陣;Rs和Ls分別為六相繞組的電阻和電感系數矩陣;ψf為電機轉子永磁體磁鏈幅值;γs為磁鏈系數矩陣;θ為電機轉子磁極位置和A相繞組軸線之間的電角度差。
由磁共能對機械角度求偏導可以得到電機的電磁轉矩為

式中:θm為電機轉子磁極位置和A相繞組軸線之間的機械角度差。
由于永磁同步電機為隱極電機,氣隙均勻分布,其相繞組電感不隨機械角度變化,則電機電磁轉矩表達式可以改寫為

六相永磁同步電機的運動方程為

式中:Ω為角速度;J為轉動慣量;B為阻尼系數;TL為負載轉矩。
1.2 余度永磁同步電機系統模型
分別將六相永磁同步電機的A、C、E和B、D、F三相繞組的接出端相連成中性點,可構成2套三相對稱繞組,2套三相繞組的相位相差60°機械角度。驅動部分采用2套三相橋逆變器即構成雙三相余度永磁同步電機系統,結構如圖2所示。
雙三相余度永磁同步電機系統可視為共用相同轉子的2個三相永磁同步電機子系統,定義為余度1和余度2。由于忽略了電機相間互感,2個三相永磁同步電機之間不存在電磁耦合,因此,可以采用傳統的三相永磁同步電機坐標變換方法,將2個三相永磁同步電機分別由三相靜止坐標系(A-B-C坐標系)變換至兩相旋轉坐標系(d-q坐標系),在d-q坐標系下實現對2個三相永磁同步電機的矢量控制。
將六相永磁同步電機的電壓和磁鏈方程變換到d-q坐標系下,去掉零序分量后,可得到電機的電壓和磁鏈方程分別為
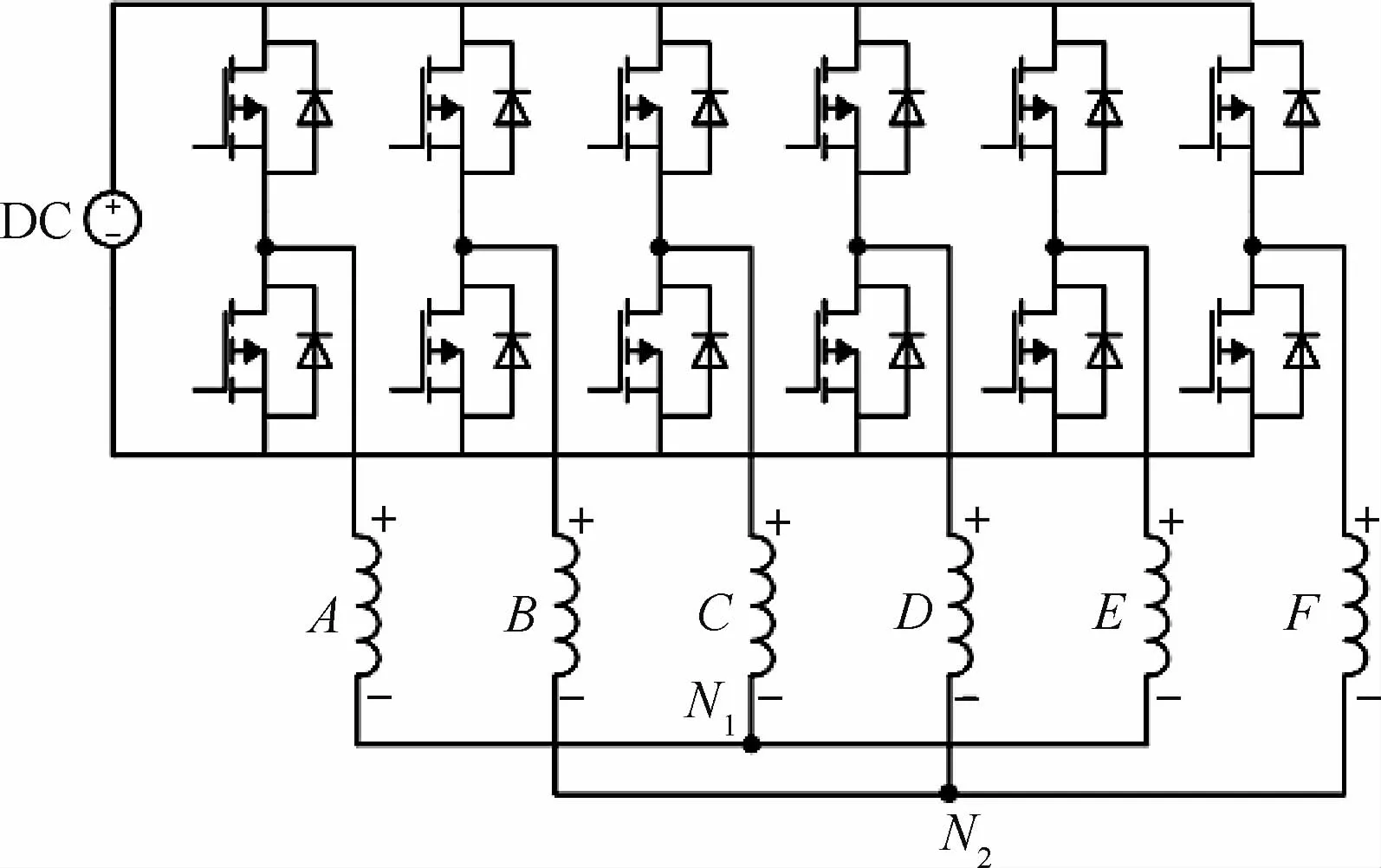
圖2 雙三相余度永磁同步電機逆變器結構Fig.2 Inverter structure of dual three-phase redundant PMSM
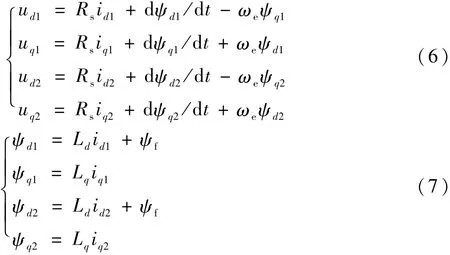
式中:ud1、uq1、ψd1、ψq1、id1和iq1分別為余度1的直軸電壓、交軸電壓、直軸磁鏈、交軸磁鏈、直軸電流和交軸電流;ud2、uq2、ψd2、ψq2、id2和iq2分別為余度2的直軸電壓、交軸電壓、直軸磁鏈、交軸磁鏈、直軸電流和交軸電流;ωe為電角頻率;Ld和Lq分別為直軸和交軸同步電感,對于隱極電機而言,由于氣隙均勻,可近似認為二者相等,則有

因此,可以得到電機的電磁轉矩為

式中:Te1為余度1的電磁轉矩;Te2為余度2的電磁轉矩;pn為電機轉子極對數。
式(6)~式(9)進一步說明,忽略相繞組間互感之后,雙三相余度永磁同步電機完全可以等價為2個三相永磁同步電機,其電磁轉矩為2個三相永磁同步電機的電磁轉矩之和。雙三相余度永磁同步電機系統基于雙d-q變換的矢量控制框圖如圖3所示。圖中:APR、ASR和ACR分別表示位置調節器、速度調節器和電流調節器;uα1和uβ1分別為余度1在靜止坐標系下的α軸和β軸電壓;uα2和uβ2分別為余度2在靜止坐標系下的 α軸和 β軸電壓;SVPWM 為空間矢量脈寬調制;SA,…,SF為各相橋臂開關信號;2r表示2相旋轉坐標系;3s表示3相靜止坐標系。
雙三相余度永磁同步電機系統基于雙d-q變換的矢量控制策略是由傳統三相永磁同步電機d-q變換矢量控制策略擴展而來,其控制結構簡單,且在正常運行或繞組開路、短路故障運行條件下,均能保證電機的對稱運行,電機的相繞組電流始終保持正弦。
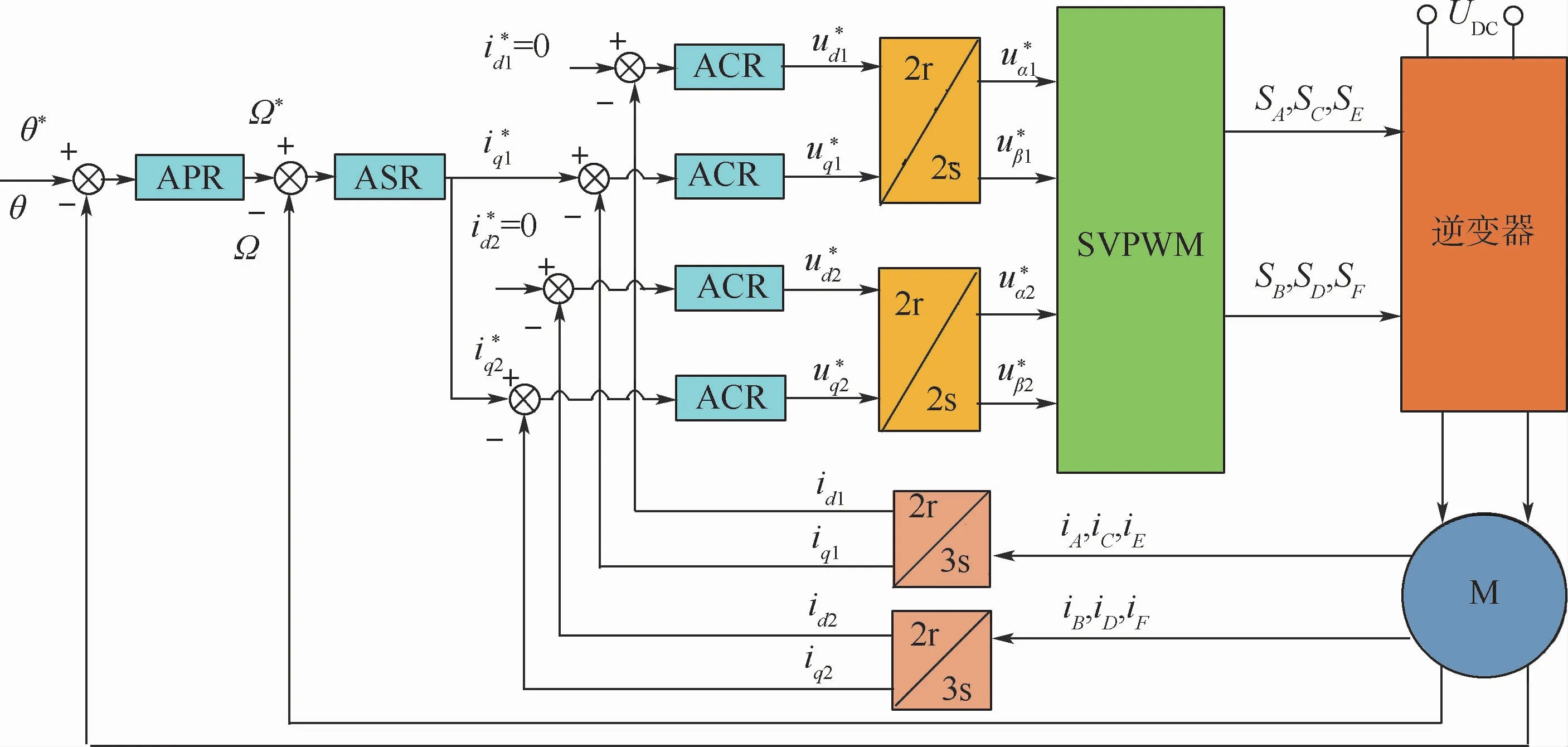
圖3 雙三相余度永磁同步電機雙d-q變換矢量控制框圖Fig.3 Dual d-q transformation vector control diagram of dual three-phase redundant PMSM
1.3 容錯永磁同步電機系統模型
將六相永磁同步電機的六相繞組的兩端分別接出,采用H橋逆變器,可構成六相容錯電機系統,結構如圖4所示。六相容錯永磁同步電機系統采用最優轉矩控制策略,該控制策略以輸出轉矩最優為目標,以電機瞬時銅耗最小為約束條件,通過解算求得電機各相電流,可以保證電機在正常運行或者故障運行狀態下輸出恒定轉矩[21-22]。
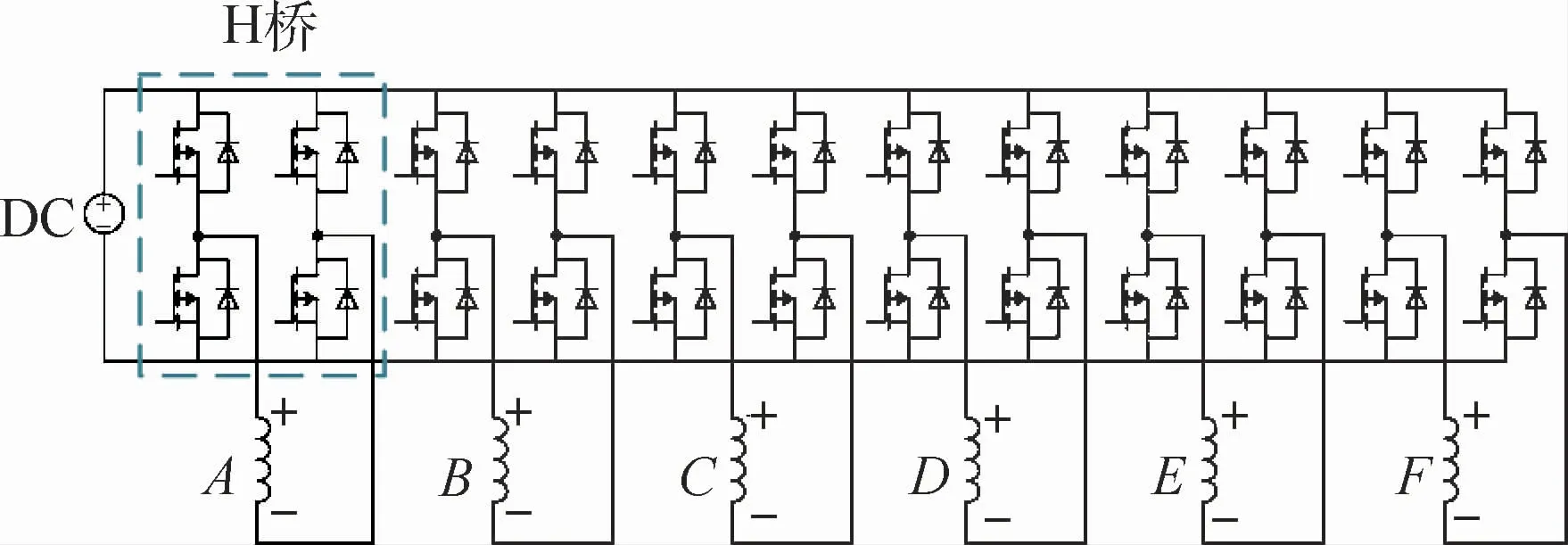
圖4 六相容錯永磁同步電機逆變器結構Fig.4 Inverter structure of six-phase fault-tolerant PMSM
六相容錯永磁同步電機的瞬時電磁轉矩可以表示為

式中:ej(t)為j相瞬時反電動勢;ij(t)為j相瞬時相電流。
當發生相繞組故障時,六相容錯永磁同步電機的瞬時電磁轉矩可以表示為

式中:Tn(t)為電機故障后正常相產生的電磁轉矩;Tf(t)為電機故障后故障相產生的電磁轉矩,其表達式分別為


其中:ki表示故障所在相。
為了保證電機能夠輸出恒定轉矩,給定如下約束條件:

式中:Tc為電機的恒定輸出轉矩。
為確定各相電流的唯一解,引入電機瞬時銅耗最小為約束條件:

則各相電流的求解變為多元函數求極值的最優解問題,因此可建立拉格朗日價值函數:

式中:λ為拉格朗日乘數。
由式(16)可求得各相電流表達式為

通過電流環實時控制電流跟蹤其解算值,便可以保證電機輸出恒定轉矩。
最優轉矩控制策略通過在靜止坐標系下直接控制各相電流瞬時值,以達到恒定轉矩輸出的目的,其算法簡單,避免了復雜的坐標變化,且不受電機相數的限制。最優轉矩控制策略的控制框圖如圖5所示。
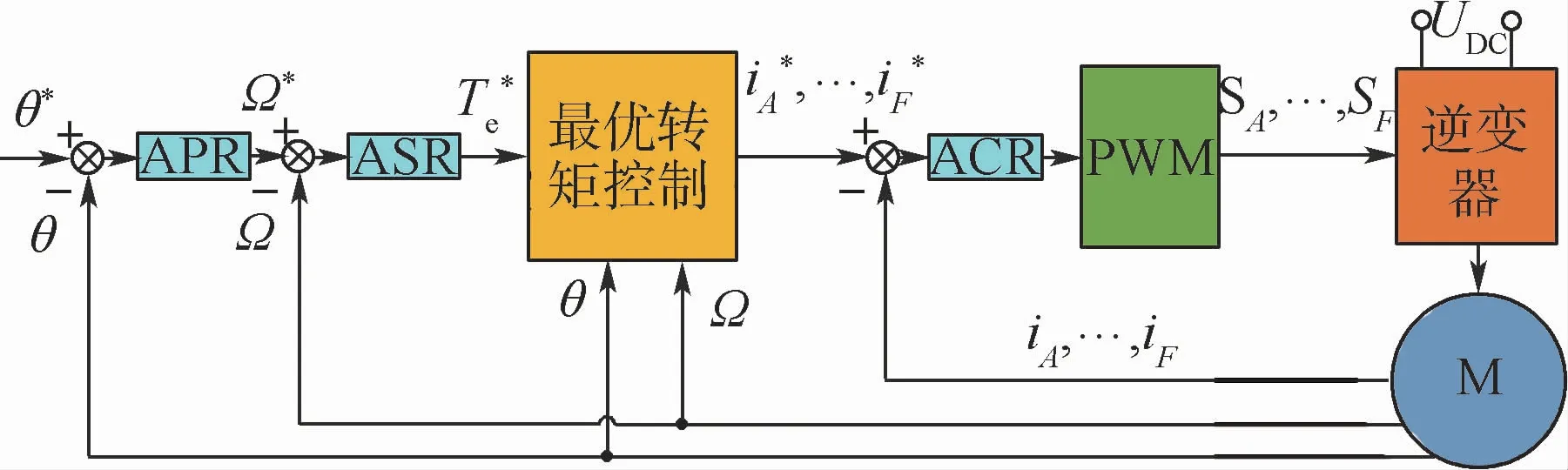
圖5 六相容錯永磁同步電機最優轉矩控制框圖Fig.5 Optimal torque control diagram of six-phase fault-tolerant PMSM
2 調速范圍分析
在直流母線電壓相同的條件下,六相永磁同步電機采用余度和容錯2種驅動控制方式時,具有不同的相電壓。由圖2和圖4可以看出,雙三相余度永磁同步電機的相繞組采用三相星型接法,直流母線電壓約束繞組的線電壓;而六相容錯永磁同步電機采用了單相繞組結構,直流母線電壓約束繞組的相電壓。由于星型接法三相繞組的線電壓是相電壓的倍,則對于相同的直流母線電壓,六相容錯永磁同步電機的相電壓約是雙三相余度永磁同步電機相電壓的倍。電機的相電壓直接影響其相繞組反電動勢,進而影響其調速范圍。
采用相繞組反電動勢和電流同相位的控制方式,可得到六相永磁同步電機單相繞組的相量圖和等效電路,如圖6所示。圖中:δ為電機功角。電機的相電壓可以表示為


式中:Um為相電壓幅值;Em為相繞組反電動勢幅值;Im為相電流幅值。
定義如下常數:
式中:n為轉速;Tout為輸出轉矩;T0為空載轉矩。
將式(20)~式(22)代入式(19)可得

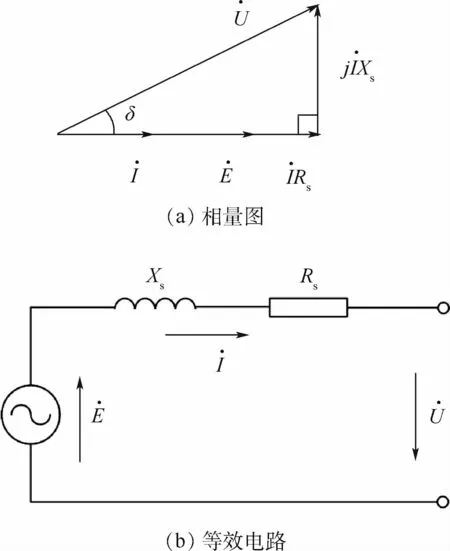
圖6 六相永磁同步電機相繞組相量圖和等效電路Fig.6 Phasor diagram and equivalent circuit of six-phase PMSM phase winding
式(23)描述了電機轉速和輸出轉矩之間的關系。與傳統永磁同步電機相比,一方面由于所設計的六相永磁同步電機相繞組感抗較大,對電機的相電壓有較大影響,不可以被忽略。另一方面,由于電機相繞組的熱約束限制了最大相電流,從而制約了輸出轉矩的最大值。由式(21)可知,相電流與輸出轉矩成線性關系,對相電流值的約束可以直接轉化為對輸出轉矩的約束條件。同時,規定電機轉速為正,由此可以得到增加約束條件后電機的轉速和轉矩的關系表達式為
式中:Tmax為輸出轉矩最大值。
根據1.2節和1.3節分析,六相容錯永磁同步電機相電壓即為母線電壓UDC,雙三相余度永磁同步電機相電壓為,根據式(24)和六相永磁同步電機設計參數,可以得到2種永磁同步電機系統的轉速-轉矩特性曲線,如圖7所示。由此可以得知,在相同轉矩條件下,相比于余度驅動控制方式,六相永磁同步電機采用容錯驅動控制方式時具有更寬的調速范圍,在不同輸出轉矩下的調速范圍提高了73%以上。
在Ansoft/Simplorer仿真環境中,分別建立雙三相余度永磁同步電機系統和六相容錯永磁同步電機系統仿真模型,對2種永磁同步電機系統的調速范圍進行了仿真研究。圖8為2種永磁同步電機系統的轉速-轉矩特性曲線仿真結果,與理論分析結果基本一致。
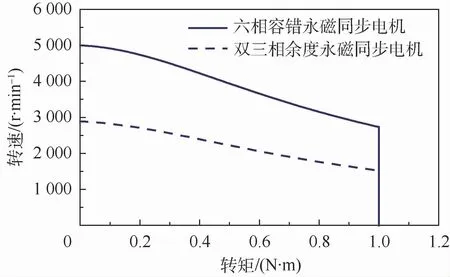
圖7 雙三相余度永磁同步電機和六相容錯永磁同步電機的轉速-轉矩特性曲線Fig.7 Speed-torque curves of dual three-phase redundant PMSM and six-phase fault-tolerant PMSM
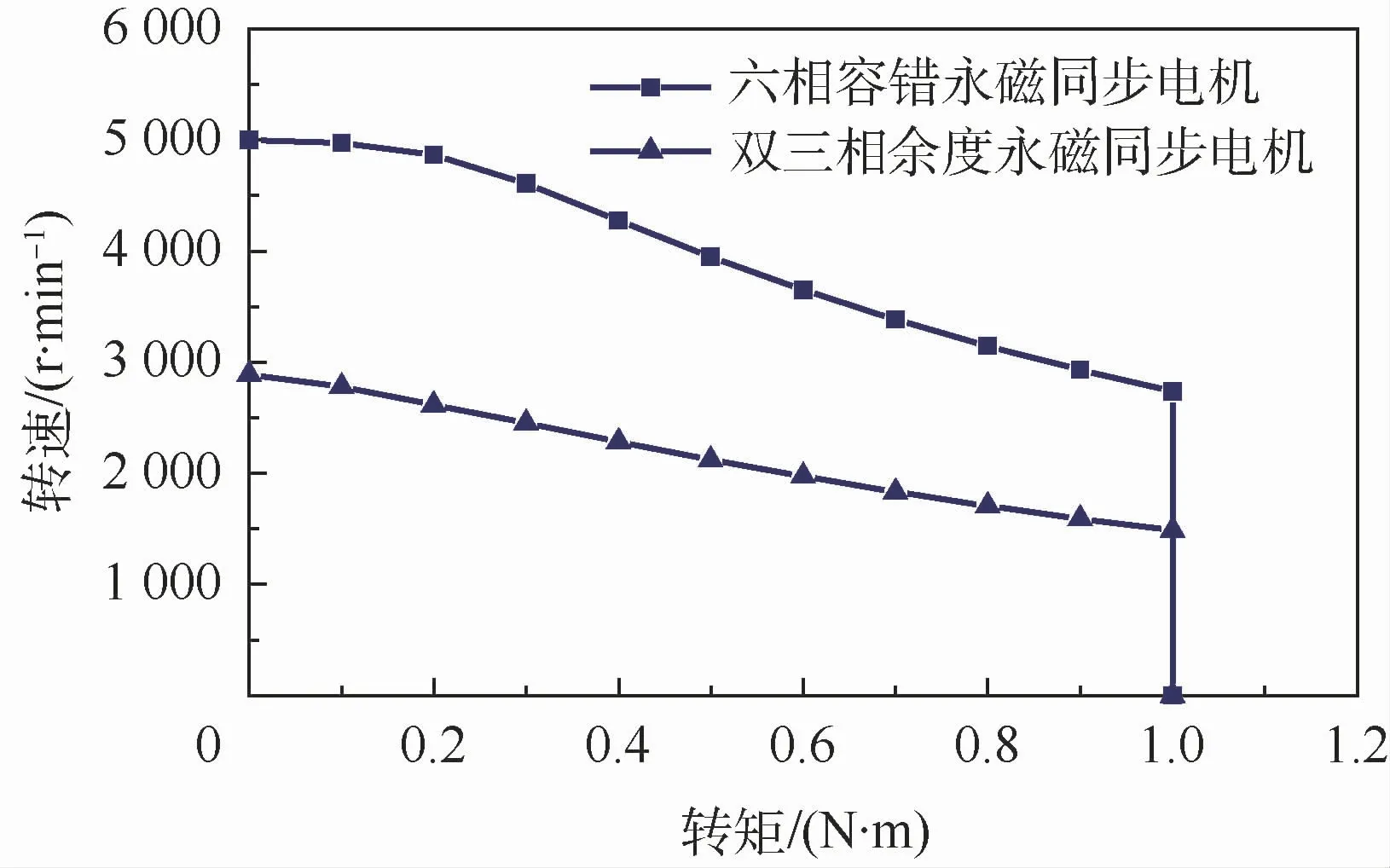
圖8 雙三相余度永磁同步電機和六相容錯永磁同步電機的轉速-轉矩特性曲線仿真結果Fig.8 Speed-torque simulation curves of dual three-phase redundant PMSM and six-phase fault-tolerant PMSM
3 動態性能分析
六相永磁同步電機每相繞組的瞬態電壓方程可表示為

式中:u為瞬時相電壓;e為瞬時反電動勢;i為瞬時相電流。
由式(25)可知,相電壓將影響電機相繞組反電動勢和相電流,即影響電機的轉速和轉矩性能。由式(5)可知,電機的轉速和轉矩性能會影響電機的位置伺服動態性能。因此,余度和容錯永磁同步電機相電壓的不同將引起兩者位置伺服動態性能的差異。
在Ansoft/Simplorer仿真環境中,對2種永磁同步電機系統的位置伺服動態性能進行了仿真分析。給定位置指令為60°機械角度的階躍信號,2種永磁同步電機系統的位置、轉速和電磁轉矩仿真波形如圖9所示。可以看出,六相容錯永磁同步電機在電磁轉矩快速性上稍優于雙三相余度永磁同步電機,其轉速峰值也稍高于雙三相余度永磁同步電機,從而六相容錯永磁同步電機的位置跟蹤性能略好于雙三相余度永磁同步電機,如圖9(a)所示,其中雙三相余度永磁同步電機響應曲線的上升時間為11.03 ms,而六相容錯永磁同步電機的上升時間為10.74 ms,減少了2.6%。給定位置指令為360°機械角度的階躍信號時,2種永磁同步電機系統的位置、轉速和電磁轉矩仿真波形如圖10所示。由于給定的階躍位置指令值較大,2種永磁同步電機系統均到達了其轉速限幅值,相比于雙三相余度永磁同步電機,由于六相容錯永磁同步電機具有更寬的調速范圍,其位置伺服動態性能更優。在該指令下,雙三相余度永磁同步電機響應曲線的上升時間為20.94 ms,六相容錯永磁同步電機的上升時間為14.73 ms,減少了29.7%。可以得知,與余度驅動控制方式相比,六相永磁同步電機采用容錯驅動控制方式在電磁轉矩動態性能和調速范圍上的優勢可以提升其位置伺服動態性能。
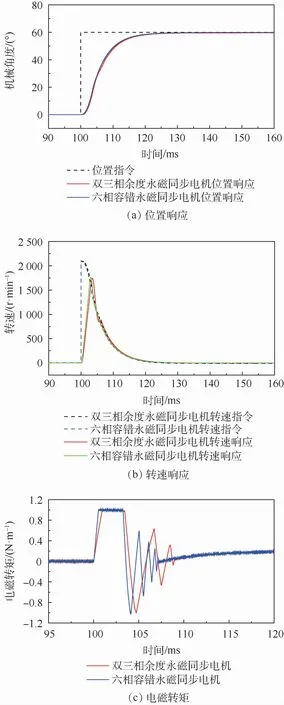
圖9 雙三相余度永磁同步電機和六相容錯永磁同步電機在60°階躍指令下的位置、轉速和電磁轉矩仿真曲線Fig.9 Simulation curves of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 60°step instruction

圖10 雙三相余度永磁同步電機和六相容錯永磁同步電機在360°階躍指令下的位置、轉速和電磁轉矩仿真曲線Fig.10 Simulation curves of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 360°step instruction
4 實 驗
為驗證理論和仿真分析的有效性,對六相永磁同步電機不同驅動控制方式下的位置伺服動態性能進行了實驗研究,系統實驗平臺如圖11所示,其由六相永磁同步電機、驅動控制系統、供電電源和CAN演示平臺組成。
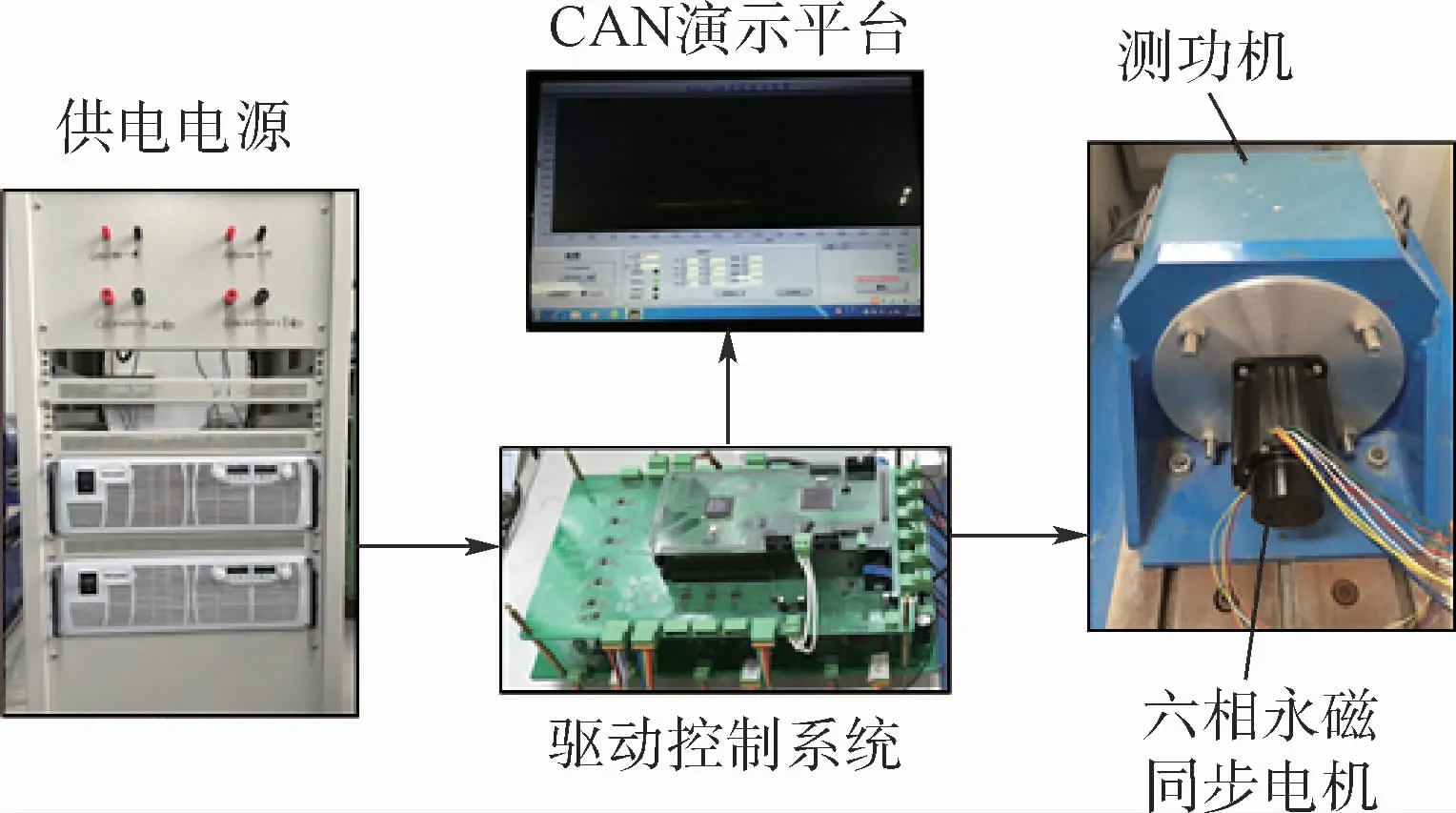
圖11 六相永磁同步電機系統實驗平臺Fig.11 Experimental platform of six-phase PMSM system
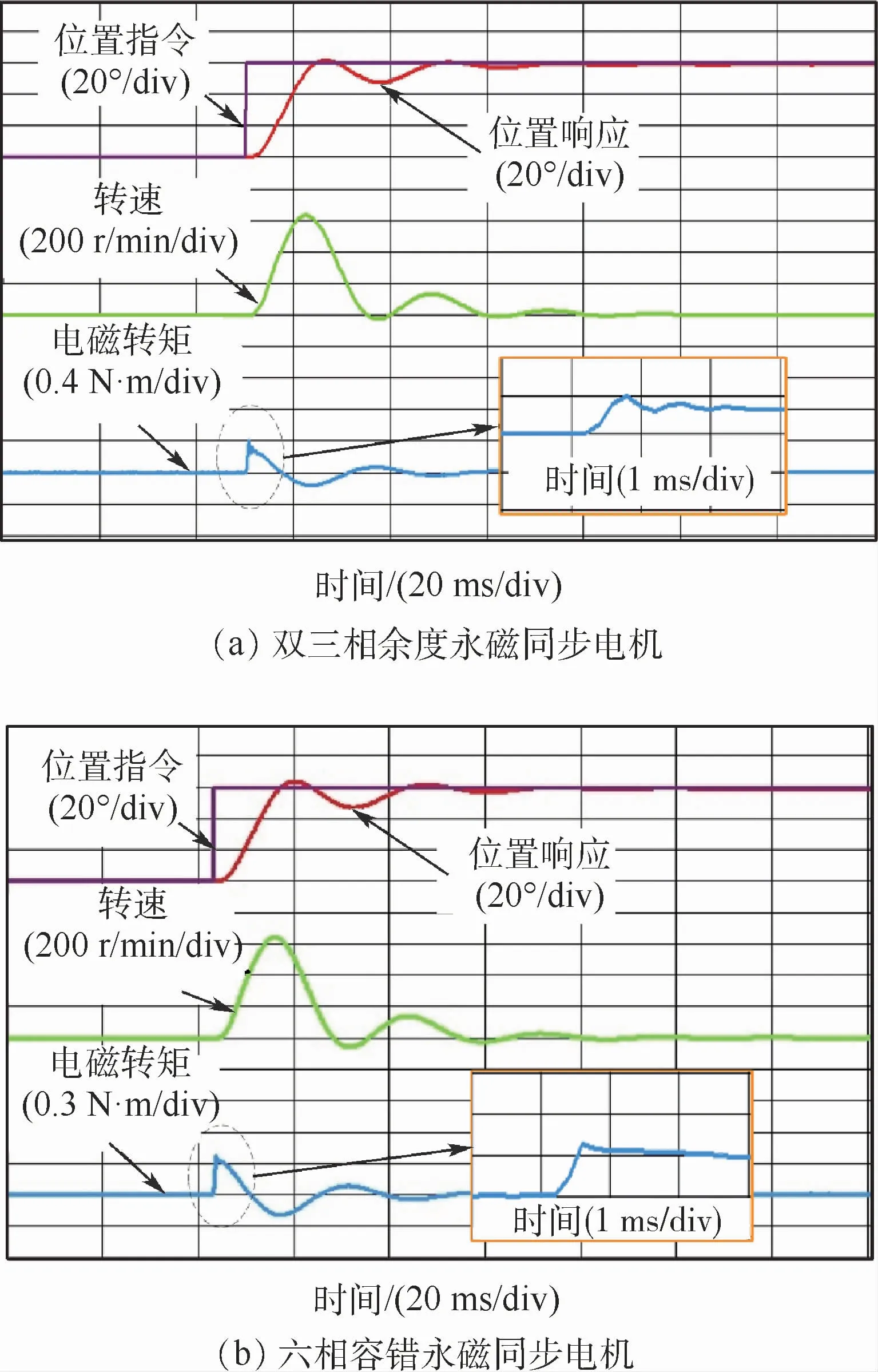
圖12 雙三相余度永磁同步電機和六相容錯永磁同步電機在60°階躍指令下的位置、轉速和電磁轉矩實驗波形Fig.12 Experimental waveforms of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 60°step instruction
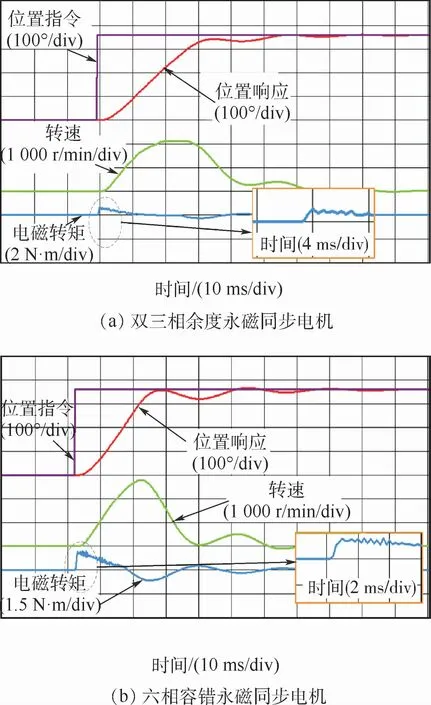
圖13 雙三相余度永磁同步電機和六相容錯永磁同步電機在360°階躍指令下的位置、轉速和電磁轉矩實驗波形Fig.13 Experimental waveforms of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 360°step instruction
給定60°和360°機械角度的位置階躍指令,圖12和圖13分別為雙三相余度永磁同步電機系統和六相容錯永磁同步電機系統的位置、轉速和電磁轉矩波形。從圖12可以看出,在60°位置階躍指令下,2種永磁同步電機系統的電磁轉矩和轉速波形類似,但六相容錯永磁同步電機的電磁轉矩上升速率較快,六相容錯永磁同步電機和雙三相余度永磁同步電機電磁轉矩到達峰值時間分別為0.61 ms和0.8 ms,六相容錯永磁同步電機的轉速峰值也稍高于雙三相余度永磁同步電機,從而,六相容錯永磁同步電機位置伺服性能稍優于雙三相余度永磁同步電機,兩者位置響應的上升時間分別為8.8 ms和9 ms。從圖13可以看出,在360°位置階躍指令下,雙三相余度永磁同步電機轉速到達限幅值,出現平頂段,而六相容錯永磁同步電機由于調速范圍較寬,可以到達較高的轉速峰值,因此,其位置伺服性能更優,六相容錯永磁同步電機和雙三相余度永磁同步電機的位置響應上升時間分別為16 ms和24.8 ms。實驗結果表明,與雙三相余度永磁同步電機相比,六相容錯永磁同步電機的位置伺服動態性能更優,其在60°和360°位置階躍指令下的響應曲線上升時間分別減小了2.2%和35%。
5 結 論
本文研究了不同驅動控制方式對六相永磁同步電機性能的影響。六相永磁同步電機采用余度和容錯2種驅動控制方式,可分別構建成雙三相余度永磁同步電機系統和六相容錯永磁同步電機系統,通過建立2種永磁同步電機系統的驅動控制模型,研究了兩者在調速范圍和動態性能的優劣,結論如下:
1)在調速范圍方面,對于相同的直流母線電壓,相比于余度驅動控制方式,六相永磁同步電機采用容錯驅動控制方式時具有更高的相電壓,因此其調速范圍更寬,在不同輸出轉矩下的調速范圍提高了73%以上。
2)在動態性能方面,相比于余度驅動控制方式,六相永磁同步電機采用容錯驅動控制方式時具有更好的轉矩控制性能和更寬的調速范圍,因此其位置伺服動態性能更為優越。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32