基于超站儀的既有線測量方法研究
2019-08-01 06:50:08朱永輝劉成龍高淑照楊雪峰
鐵道勘察 2019年4期
朱永輝 劉成龍 高淑照 楊雪峰
(1.西南交通大學地球科學與環境工程學院,四川成都 611756;2.西南交通大學高速鐵路運營安全空間信息技術國家地方聯合工程實驗室,四川成都 611756)
為了進行既有線軌道測量,首先要建立完整的運營維護測量控制網[1]。關于既有線控制網與軌道測量方法,許多學者與工程技術人員已進行了相關研究。全志強[2]對鐵路有砟軌道CPⅢ網測量方法進行了研究,通過分析自由測站邊角交會法和導線測量的內在聯系,對鐵路有砟軌道CPⅢ控制網自由測站邊角交會法進行探討;覃慶[3]對既有線測量技術的安全性、效率、精度等問題進行研究,提出用坐標法測量既有線的基本思路;陳光金[4]對鐵路既有線測量和設計的一體化模式進行了研究;羅遠剛[5]參照高速鐵路CPⅢ自由測站邊角交會網,提出一種普速鐵路新型軌道控制平面網的建網和施測方法,即單點交錯的自由測站邊角交會網。從已有研究來看,大多數聚焦于其中一種方法的研究與優化,并未全面考慮線下測量與線上軌道控制網測量兩者的關系, 以下將深入研究兩個工序的特點與相互關系,探索一種高效率的測量方法。
1 新型網設計及其測設
1.1 傳統平面控制網
參照《鐵路工程測量規范》(TB10101—2009),對于行車速度160 km/h的鐵路既有線,應分別布設CPⅠ、CPⅡ和CPⅢ控制網。其中,CPⅠ和CPⅡ網沿線路走向布設[6],控制點分別設在距線路中心 50~500 m和50~200 m范圍內(如圖1所示),CPⅠ采用四等GNSS測量,CPⅡ采用五等GNSS或導線測量[7]。
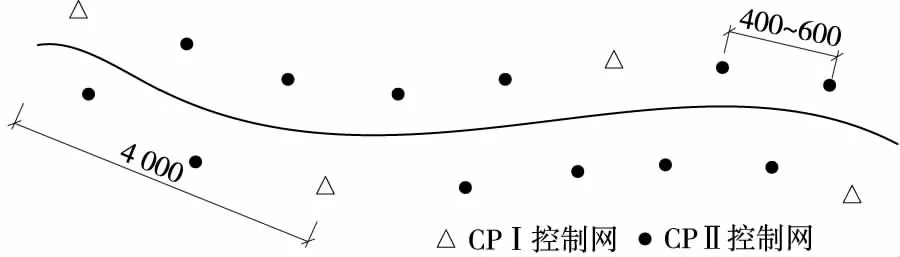
圖1 CPⅠ、CPⅡ點位布設示意(單位:m)
目前,既有線的CPⅢ點都是布置在軌道兩側的接觸網桿、橋梁防撞墻或隧道側壁上[8],每隔100~120 m 布置1對點,采用自由測站邊角交會法進行測量,相鄰自由測站點間隔200~240 m。在自由測站點上對前后各3對CPⅢ點(共12個CPⅢ點)進行邊角觀測,CPⅢ平面控制網應附合在 CPⅠ、CPⅡ或加密的高級控制點上[9],如圖2所示。
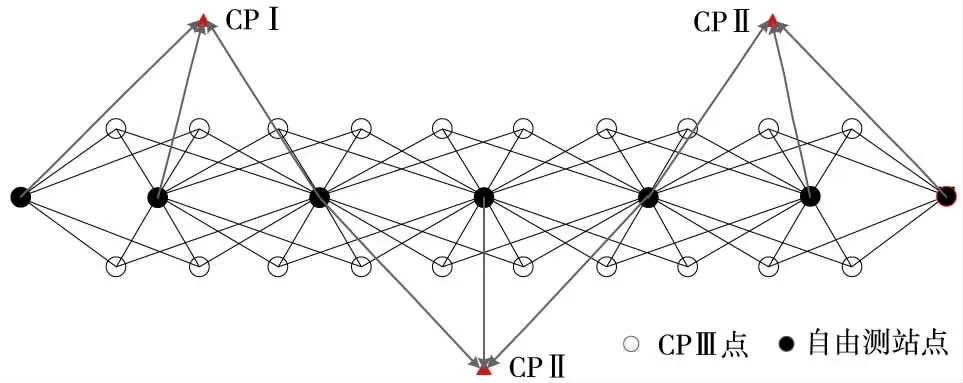
圖2 CPⅢ平面網測量方法示意
1.2 新型CPⅡ控制網
(1) 超站儀及快速靜態定位簡介
隨著測量機器人和全球定位系統的不斷發展,超站儀應運而生。超站儀是由全站儀和全球定位系統集成的測繪系統。它既具有全球定位系統的功能,又具有全站儀的功能,是一種超級全站儀或超級全球定位系統。該系統所實現的無加密控制作業模式,是對傳統測繪模式的革命性改造[10]。
超站儀是一種新型的工程測量儀器,集成了GNSS系統和全站儀技術,能夠對超站儀測站位置的空間坐標進行定位[11];定位之后,再利用全站儀對被測物進行自由測站測量。這種新型的測量方法不必設置加密控制點,測量時全站儀不必照準后視點,大大提高了測量效率,同時保證了測量精度[10]。超站儀可以隨意集成與分解,可單獨作為全站儀或GNSS接收機使用,亦可將兩者集成使用。
常規的GNSS靜態相對定位技術通常需進行較長時間的同步觀測(一般需1~2 h),才能確保定位結果的精度和可靠性,即使在短基線測量時也是如此[12]。隨著多星座全球定位系統的建成,對于邊長較短、精度要求又不高的GNSS靜態相對定位,GNSS快速靜態定位技術只需進行短時間觀測便能快速確定整周模糊度,從而獲得高精度的基線向量解[13]。
(2)基于超站儀的新型CPⅡ控制網
CPⅡ網的主要作用就是為CPⅢ平面網提供一個起算基準。新型CPⅡ網是將原來CPⅢ平面網的自由測站點作為CPⅡ控制點,如圖3所示。
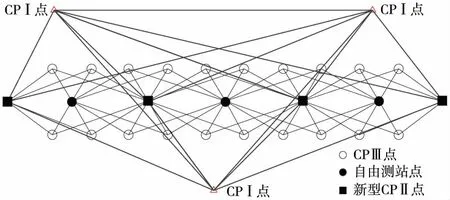
圖3 新型CPⅡ網測量網形示意
新型CPⅡ網測設:在線下的3個CPⅠ點上架設GPS接收機并進行足時測量(選取的CPⅠ點應盡量靠近且能覆蓋所測線路,最遠的兩個CPⅠ點間距不應大于15 km),然后對線上CPⅢ網(使用超站儀)按照自由測站法依次進行測量(參照《鐵路工程測量規范》,相鄰CPⅡ點間距為400~600 m),每隔一個或二個自由測站測量一個新型CPⅡ點,超站儀在自由測站上的快速靜態測量時間應不少于10 min。在后續的數據處理中,新型CPⅡ點與線下的CPⅠ點之間構成同步觀測,經過基線計算和整網平差后,就可以得到新型CPⅡ點的坐標。
進行CPⅢ平面網測量時,在一個測站點上至少測量兩個測回,加上全站儀的學習測量時間,大概需要15 min。新型CPⅡ網以自由測站點作為控制點,既不需要提前埋點,在測量時也沒有對中誤差,提高了測量精度及效率。
2 精度分析與實驗驗證
控制網的精度估算是控制網設計的一項重要工作,即由所設計的網形和網的觀測值精度推算出邊長中誤差、方位角中誤差以及點位中誤差等精度指標。只有估算出的精度指標滿足規范或工程的相應要求,其測量方案才是可行的[14]。
為驗證新型CPⅡ網的可行性及精度,首先對GNSS快速靜態測量得到的基線質量進行驗證,分析其能否達到規范要求的CPⅡ網精度要求;其次,新型CPⅡ網相鄰兩個CPⅡ點之間沒有直接的基線觀測量,不能按傳統的平差方法直接計算出相鄰CPⅡ點之間的相關精度指標。因此,需推導新型CPⅡ網中相鄰點的方位角中誤差、邊長中誤差和邊長相對中誤差等精度指標,并進行觀測驗證。
2.1 基線質量
根據規范要求,基線觀測數據質量應符合下列規定:①同一時段觀測值的數據剔除率不宜大于10%。②同步環閉合差、獨立環閉合差、重復觀測基線長度較差應符合參考文獻[6]的相關規定。
為了驗證快速靜態測量的基線精度,在某既有鐵路線上進行了觀測實驗。首先在線下選取了三個相距較遠的CPⅠ點,架設雙頻多星GNSS接收機,然后在線上三個相鄰的CPⅡ點上進行快速靜態測量實驗,每個時段觀測10 min,共觀測了6個時段,按照規范要求進行基線解算和網平差,得到各個時段獨立閉合環的閉合差,以及三維無約束平差后各基線向量的改正數,各個時段獨立閉合環的最大閉合差和基線向量改正數的最大值,上述各項指標的統計結果如表1和表2所示。
由表1和表2可見,6個時段閉合環的閉合差和三維無約束平差后基線向量的改正數都滿足限差要求,即按照GNSS快速靜態方法測得的基線可以達到規范中160 km/h既有線CPⅡ網的精度要求。由該方法所建立的新型CPⅡ網的精度還需進行進一步的研究和驗證。
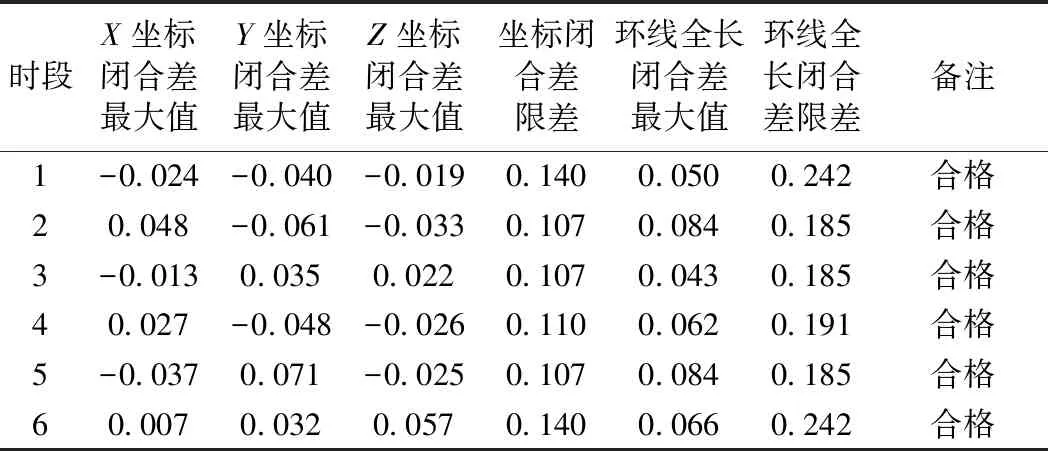
表1 不同時段獨立環最大閉合差統計 m
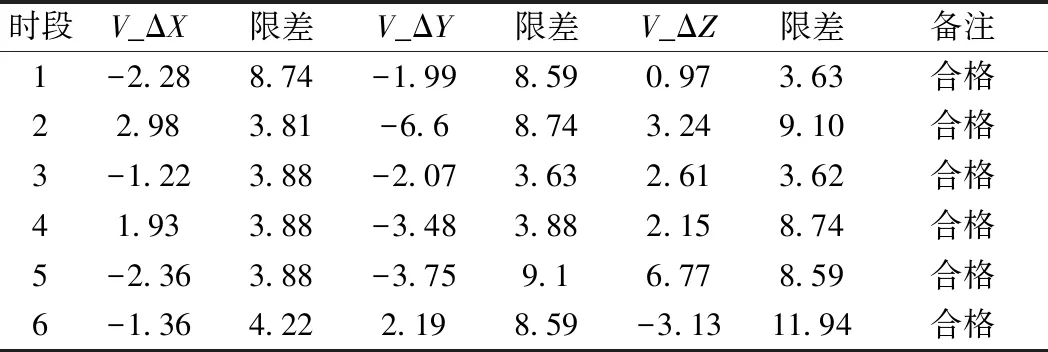
表2 不同時段三維無約束平差后基線向量改正數最大值統計 cm
2.2 新型CPⅡ網相鄰點間的精度
相鄰新型CPⅡ點之間沒有直接的觀測量,在平差中不能直接計算出相鄰點之間的精度,而規范中對于CPⅡ網精度的評價指標主要是相鄰點的精度信息。因此,需要對相鄰新型CPⅡ點之間方位角中誤差、邊長中誤差和邊長相對中誤差的計算公式進行推導,并通過實驗進行驗證。
首先,相鄰兩個CPⅡ點A、B之間的方位角計算公式為

(1)
(2)

(3)
其中,k0為常數項,按照式(4)計算,有
(4)

(5)

(6)
(7)
由誤差傳播定律可得

(8)
如此便得到了新型CPⅡ網中相鄰點方位角中誤差的計算公式。
同理,根據邊長的計算公式

(9)
將其用泰勒公式展開,全微分后略去二次以上各項,有

(10)
(11)
由誤差傳播定律可得邊長中誤差

(12)
則邊長相對中誤差為
(13)
為了探究新型CPⅡ網所能達到的精度,在一段既有鐵路上建立如圖3所示的新型CPⅡ實驗網。按照上文所述方法對實驗網進行測量,并在二維約束平差后計算新型CPⅡ網中相鄰點之間的各項精度指標,結果如表3所示。
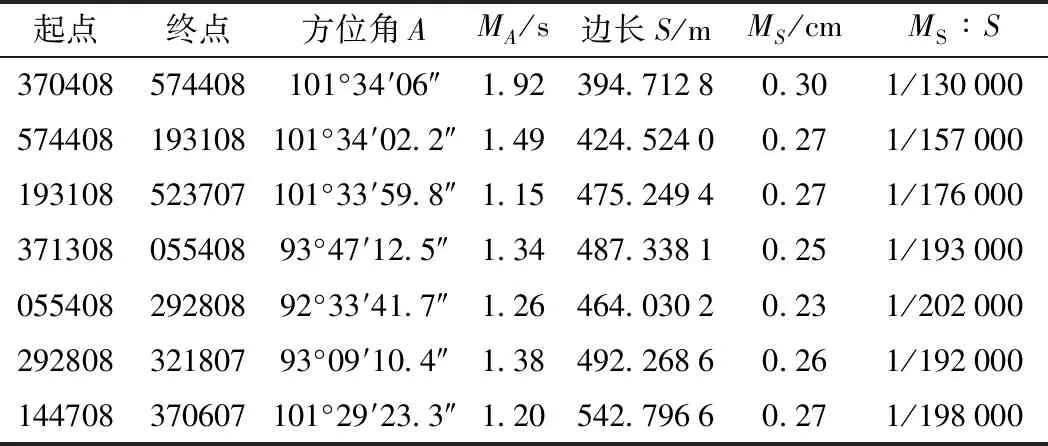
表3 二維約束平差后新型CPⅡ網中相鄰點的精度信息統計
由表3可見,二維約束平差后,新型CPⅡ網相鄰點的方位角中誤差均不大于2″,邊長相對中誤差均不大于1/100 000,滿足《鐵路工程測量規范》線路CPⅡ網的精度要求,即相鄰點的方位角中誤差不超過3″,邊長相對中誤差不超過1/40 000[15]。
3 結束語
(1)基于超站儀和GNSS快速靜態測量技術所建立的新型CPⅡ網能夠達到規范中160 km/h鐵路CPⅡ網的精度要求,可以取代傳統既有線測量中的CPⅡ網。
(2)新型CPⅡ網和CPⅢ平面網可以同時進行測量,也可與CPⅢ平面網同時進行復測更新。
(3)新型CPⅡ網與CPⅢ平面網的自由測站點共點,既不需要提前埋點,在測量時也沒有對中誤差,能夠有效地節省費用,提高測量效率。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08