基于人體敏感頻率的二自由度動力吸振器研究
2019-08-02 03:20:14周勁松孫文靜夏張輝
鐵道學報 2019年6期
孫 煜,周勁松,宮 島,孫文靜,夏張輝
(同濟大學鐵道與城市軌道交通研究院, 上海 201804)
列車運營速度的提高意味著更嚴重的振動,這就要求鐵路運輸從振動對人體生理影響出發,開展改善舒適度的研究[1]。振動是不舒適的來源,人處于振動環境中,不僅會引起疲勞,還可能發生人體內部器官及全身組織與外界振動共振的可能。為此,諸多學者對車輛振動控制展開研究,文獻[2-3]建立了鐵道車輛路-車-人統一的數學模型,運用協方差算法計算車輛運行平穩性,提出了基于車體模態參數來評估與分析車輛運行品質的方法。文獻[4-5]提出將車下設備設計為車體的動力吸振器,以降低車體彈性振動,從而提高車輛運行平穩性。文獻[6]提出將構架縱向振動設計為車體垂向彎曲振動的動力吸振器,通過數值仿真分析和實驗研究,證明了所提出的方案可以有效降低車體振動。文獻[7]將車體視為均質歐拉-伯努利粱,在車底縱向安裝抗垂彎減振裝置,從而改變一階垂彎頻率,以降低車體垂向彈性振動,但所提出的抗垂彎減振裝置重量較重、長度大,工程運用難度較高。
以往車體振動控制研究中,大多是抑制車體彈性振動,鮮見抑制車體剛性振動的研究。本文基于平穩性指標權重函數,結合高速動車組實測數據,提出采用基于加速度的二自由度動力吸振原理,設計同時抑制車體浮沉與點頭振動的二自由度動力吸振器,建立高速動車組動力學模型,運用虛擬激勵法及運行平穩性協方差算法計算二自由度動力吸振器對高速動車組運行工況下車體振動的影響。研究表明,安裝二自由度動力吸振器后,車體響應功率譜密度峰值明顯降低,車輛運行平穩性提高,二自由度動力吸振器可有效抑制車體浮沉及點頭振動。
1 平穩性指標權重函數
國內某型高速動車組速度為300 km/h時的車體中部垂向加速度功率譜密度如圖1所示。實測結果顯示,車體垂向振動加速度主頻為2.0 Hz,該振動是由于車體浮沉振動所致,除主頻外,在9.25 Hz處也有一個峰值,此峰值是由于車體彈性一階垂向彎曲振型所致。可以看到,彈性振動所致峰值明顯小于剛性振動所致峰值,即彈性振動能量小于剛性振動能量。
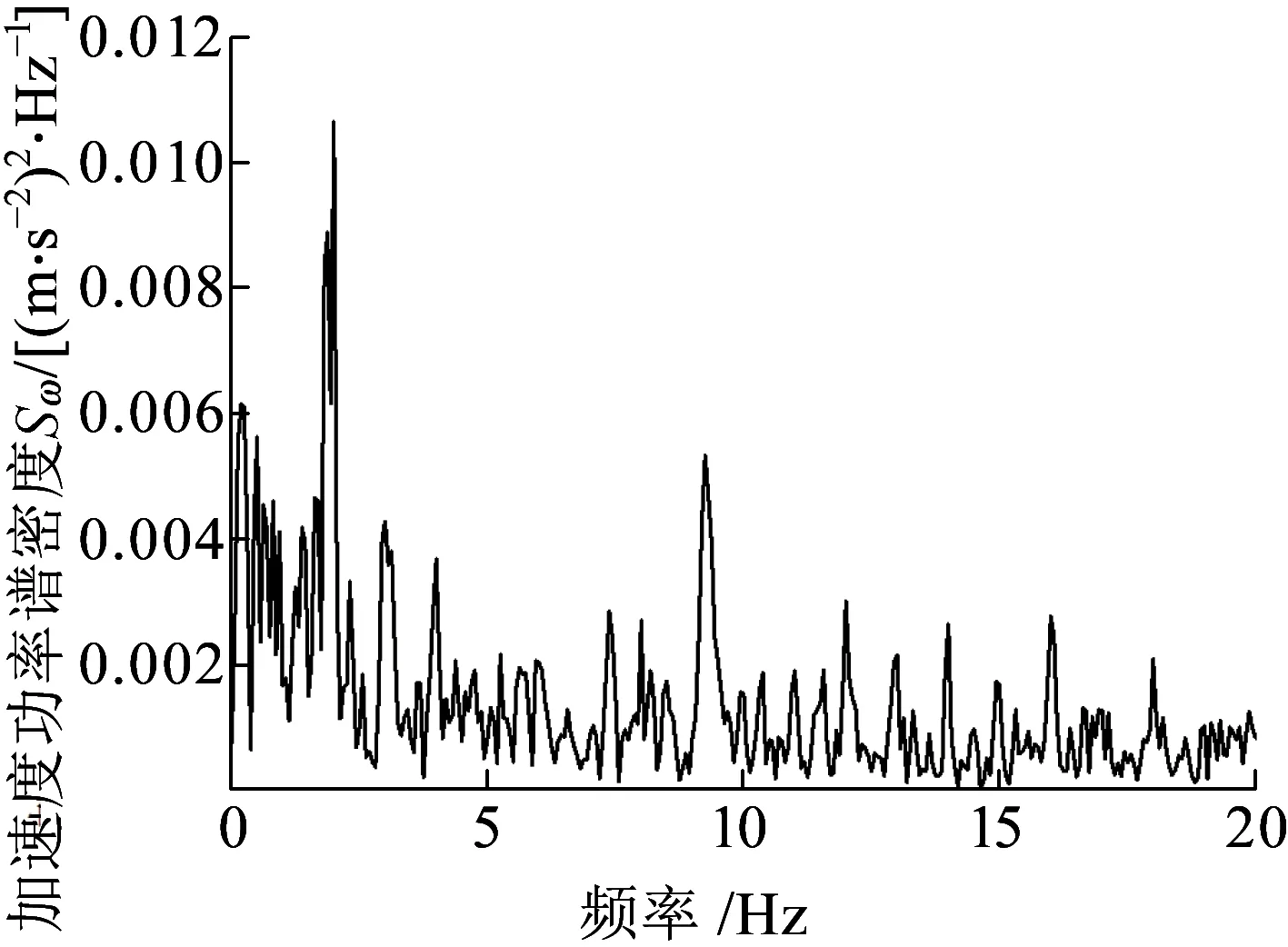
圖1 實測車體中部垂向加速度功率譜
合理的動力學性能評價方法與適當的指標體系是對車輛動力學性能評價的重要依據,目前我國采用GB/T 5599—85《鐵道車輛動力學性能評定和試驗鑒定規范》[8]進行鐵道車輛動力學性能評價,其中對車輛運行品質的評價采用的是平穩性指標Wz,該指標可依據連續單一權重函數和相應積分算法一次性獲得。其中,用于垂向舒適度評價的權重函數Bs為[9]

(1)
式中:f為振動頻率。權重函數反應的是人體對各頻率的敏感程度,權重函數越大,代表人體對該頻率越敏感。根據式(1)繪制其幅頻特性如圖2所示。可以看到,車體剛性振動所在的2.0 Hz處權重函數明顯高于彈性振動所在的9.25 Hz。以往的研究大多是對車體彈性振動進行控制,鮮見對車體剛性振動進行控制。結合圖1與圖2可以發現,從人體感受舒適度的角度出發,對車體剛性振動進行控制具有更加重要意義。
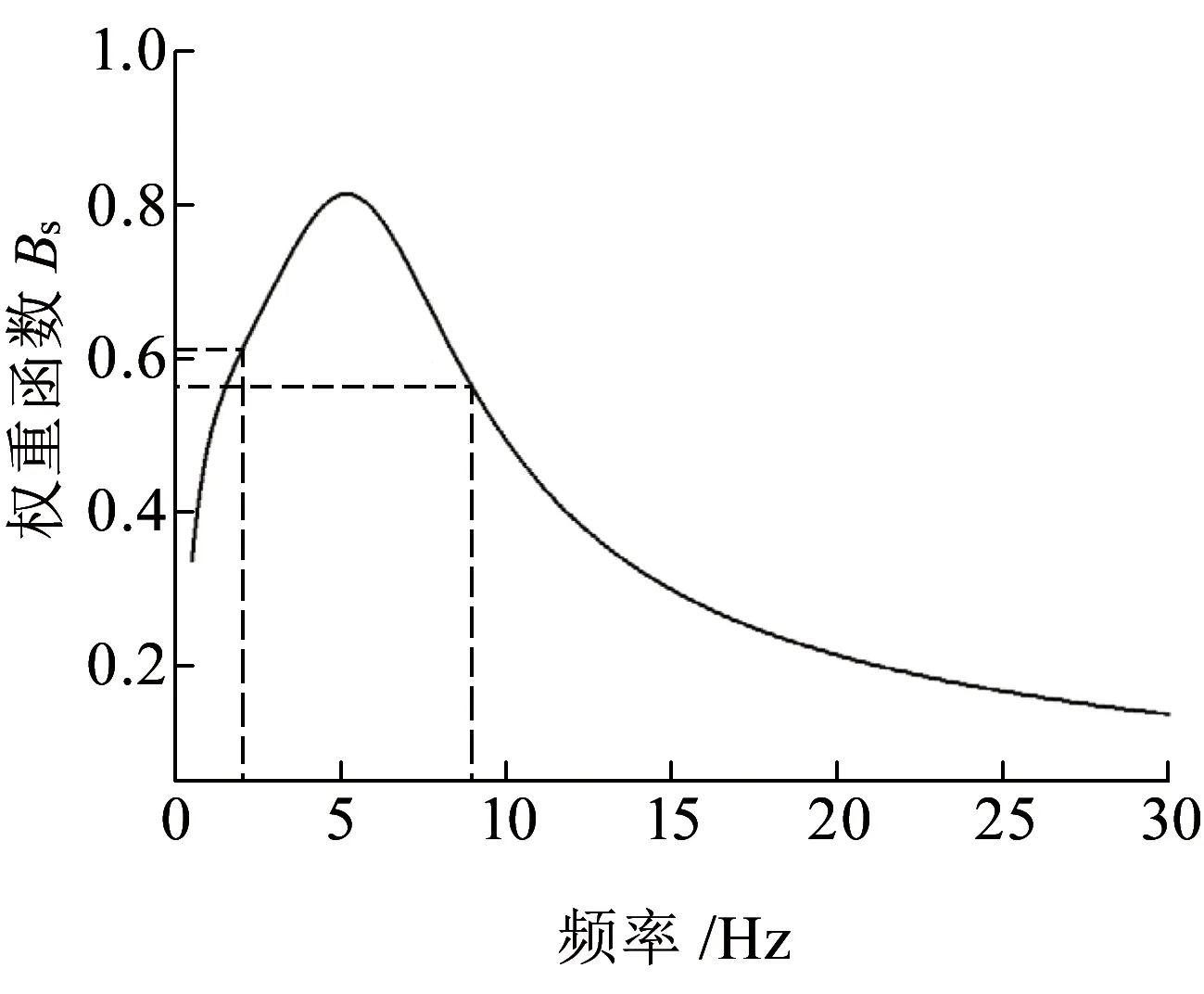
圖2 平穩性指標權重函數
2 基于加速度的二自由度動力吸振原理
動力吸振器是一種被動振動控制方式,在橋梁、航空等工程領域得到廣泛運用。其工作原理是在振動物體上安裝附加質量、彈簧、阻尼系統,使系統在振動時,輔助系統產生與主系統振動方向相反的力,從而降低主系統的振動[10]。
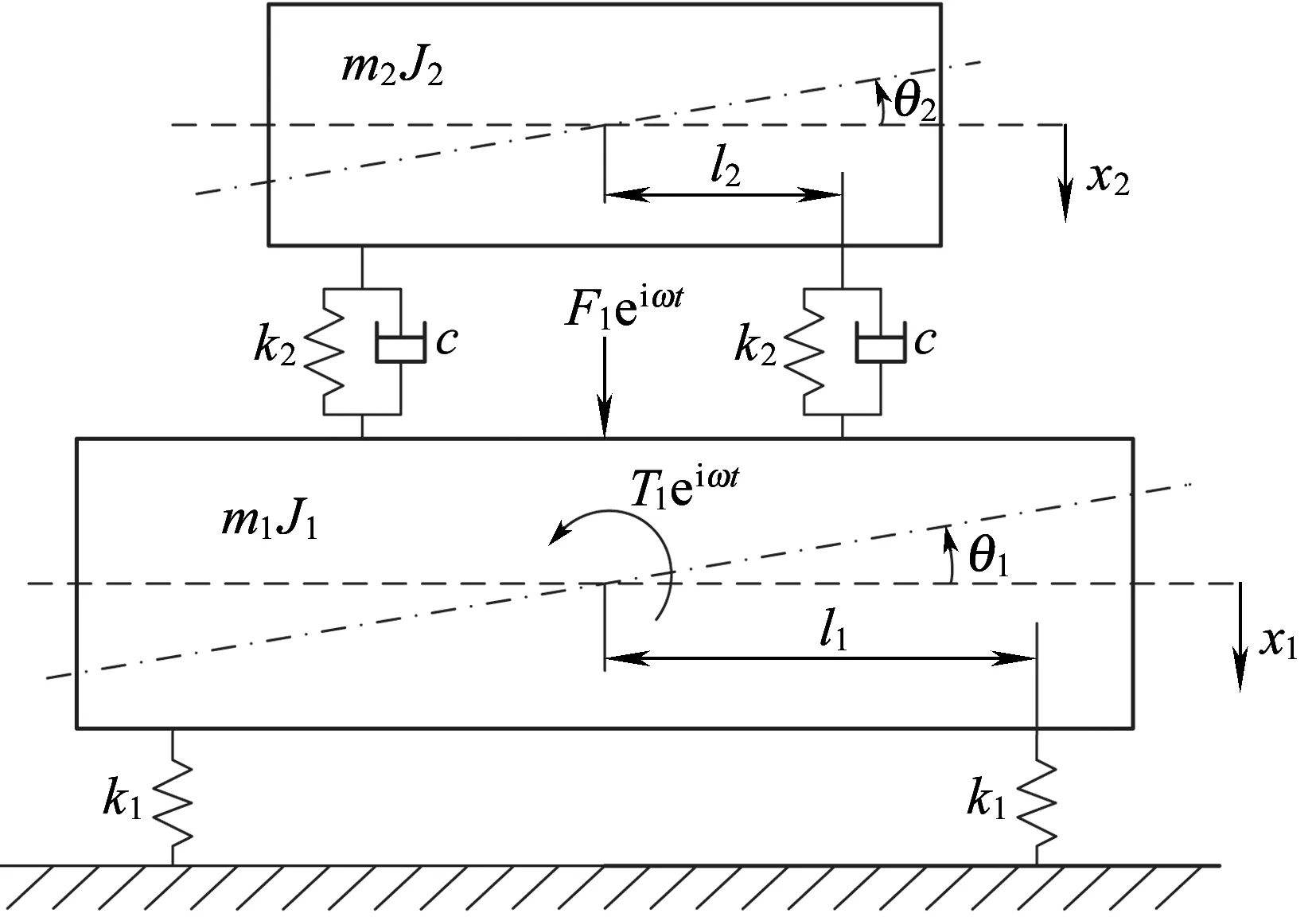
圖3 二自由度動力吸振器原理圖
圖3是二自由度動力吸振原理圖,主振動系統及動力吸振器系統均考慮了浮沉和點頭振動,其動力學方程為

(2)
(3)

(4)
(5)
式中所涉及參數及其意義見表1。
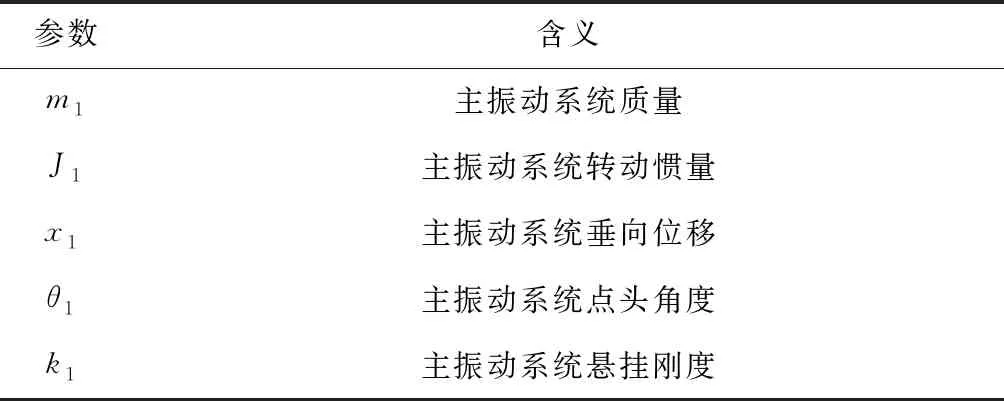
表1 二自由度吸振器參數及其含義
通過觀察模型的振動微分方程可以發現,浮沉振動和點頭振動并不耦合,相互獨立。也就是說,兩種振動可以單獨進行描述。本文以點頭振動為例,推導基于加速度的點頭吸振原理,聯立式(4)與式(5),假設其解為
(6)
式中:Θ1、Θ2分別為主振動系統和動力吸振器的響應幅值;φ為相位。主振動系統的加速度可表示為
(7)

(8)
利用定點理論,令式(8)中ζ=0及ζ=∞的兩式相等,計算可得兩定點的坐標表達式,再令二者等高,可得滿足加速度響應的動力吸振器最優同調條件為
(9)
基于加速度響應的最優同調得到滿足時,主振動系統加速度響應與定點P、Q的關系如圖4所示,圖4所示是轉動慣量比μ=0.1的情況,其中ζ=0.18是動力吸振器最優阻尼,此時主振動系統加速度響應振幅比峰值位于定點P、Q附近。
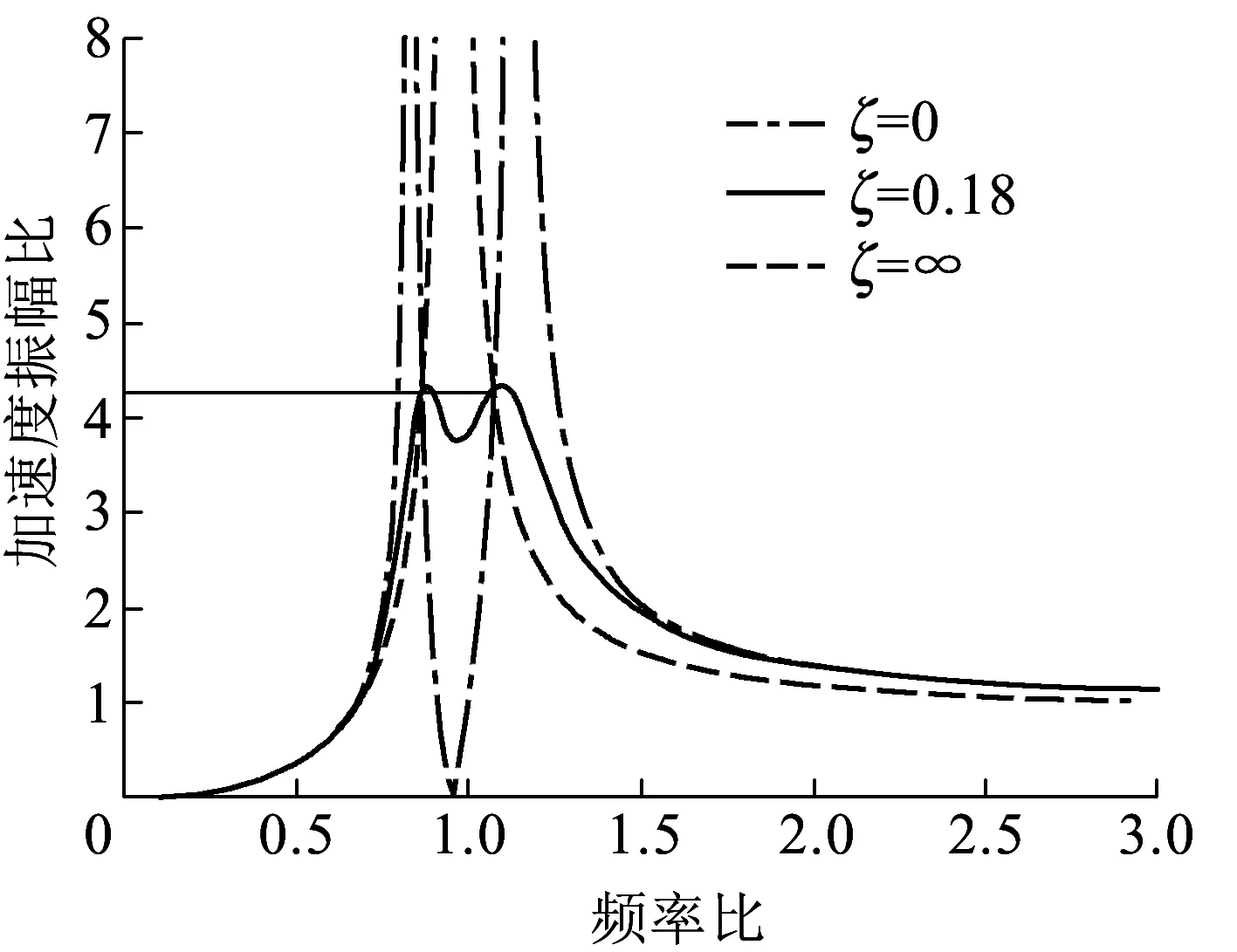
圖4 主振動系統加速度響應曲線
3 車輛垂向動力學模型的建立
由于鐵道車輛垂向和橫向動力學存在弱耦合,所以通常分開建模進行研究。車輛垂向力學模型如圖5所示。建模時,輪對、構架、車體、動力吸振器均假設為剛體,不考慮軌道彈性。車輛運行中,假設車輪始終貼靠鋼軌,也就是說,建模時不考慮輪對的垂向運動方程,這樣車輛垂向動力學模型為8個自由度,分別為車體、動力吸振器及前、后轉向架的浮沉、點頭(2×4)。
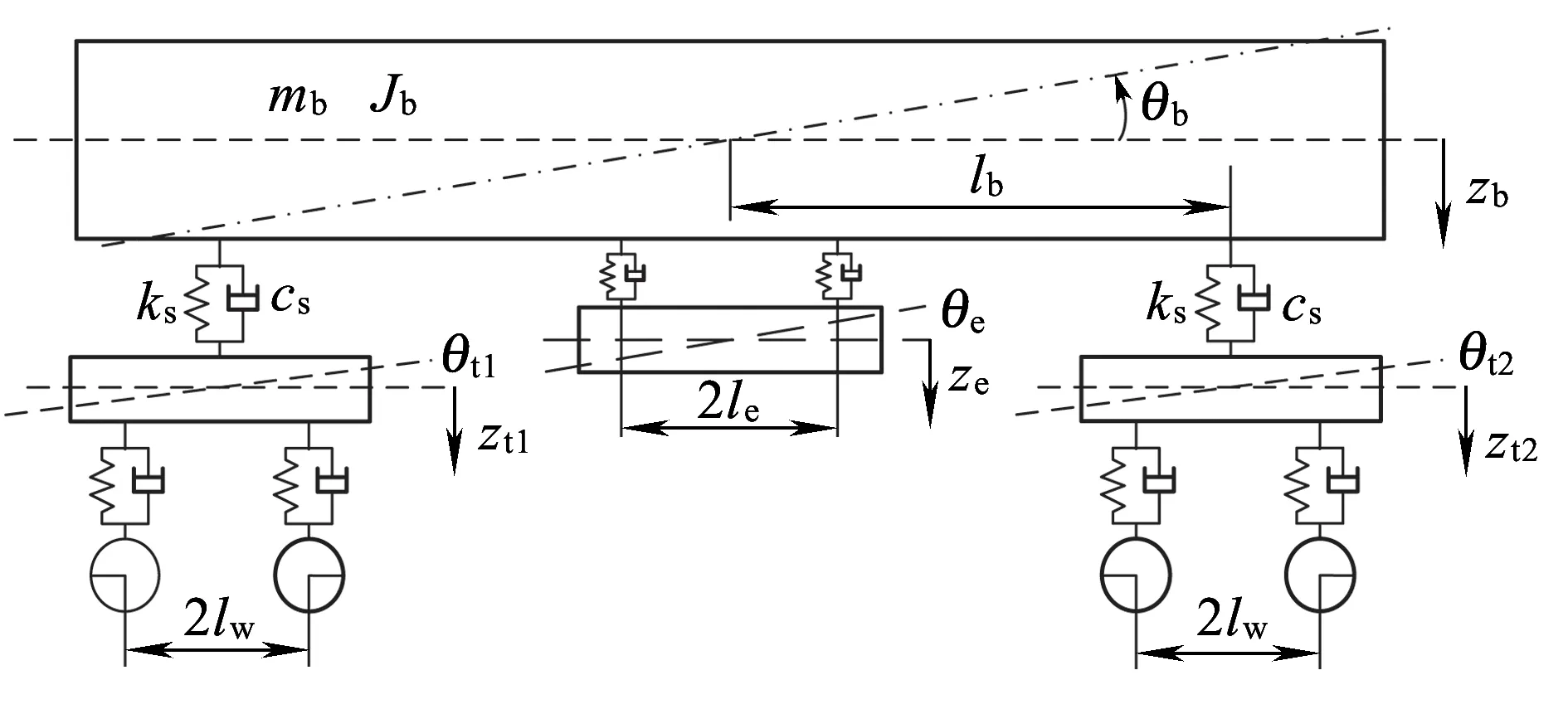
圖5 垂向力學模型
根據圖5所示單車垂向力學模型,列車動力學方程為

(10)

(11)

(12)

(13)

(14)

(15)
(16)
(17)
式中各參數及其意義見表2,參數取自某型高速動車組。
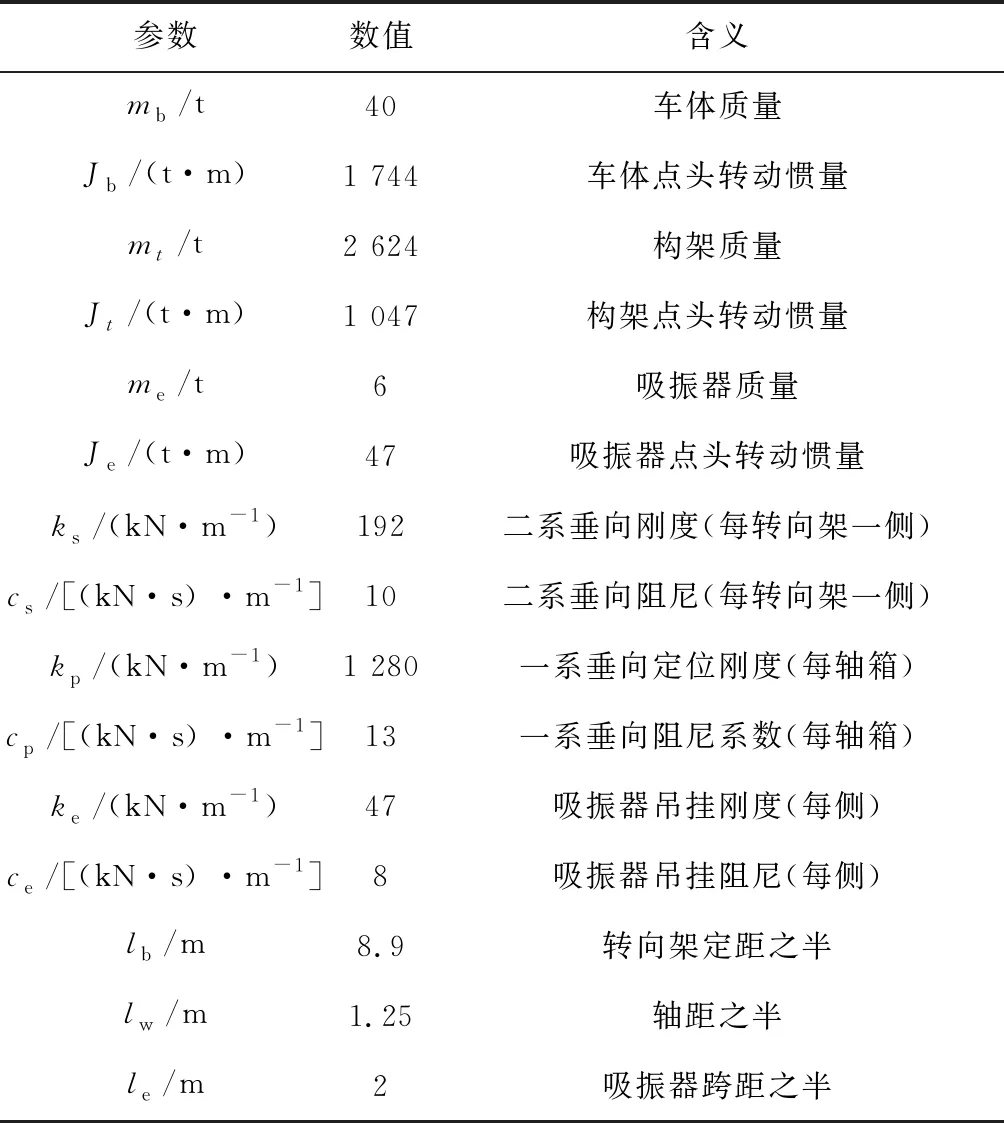
表2 車輛動力學參數及其含義
上述可以表示為
(18)
其中
(19)
(20)
式中:M為質量矩陣;C為阻尼矩陣;K為剛度矩陣;Dw為激勵輸入矩陣。將式(18)寫成狀態方程形式
(21)
其中
(22)
無動力吸振器車體振型頻率及阻尼比見表3。
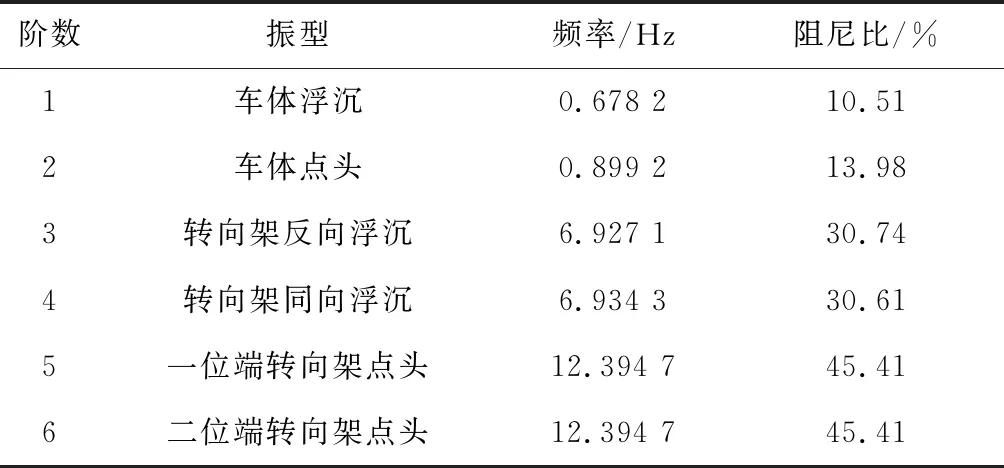
表3 車體振型頻率及阻尼比
4 虛擬激勵分析方法及運行平穩性協方差算法
運用虛擬激勵分析方法[11-13]可以快速獲得鐵道車輛系統的響應幅值譜。對于軌道車輛系統而言,第2~4位輪對的輸入可視為第1位輪對輸入的時延,將f(t)視為廣義的單激勵,設F(t)的自譜密度為SFF(ω),則對于4點異相位平穩隨機過程的虛擬激勵為
(23)
將式(23)帶入式(18)可得
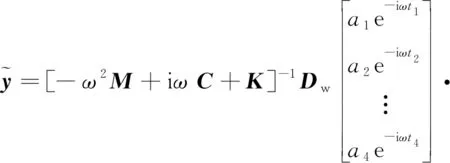
(24)
于是可得響應功率譜Syy為
(25)

平穩性協方差算法沒有時域積分過程,只通過矩陣運算就可以獲得線性模型的平穩性指標[14-15],計算速度快,效率高。對于式(21)的鐵道車輛動力學狀態方程,當輸出為
Y(t)=CX(t)
(26)
系統狀態向量的協方差矩陣為
Xxx(t)=E[X(t)X(t)T]
(27)
該矩陣為穩態值,為Liapunov方程的解
AXxx+XxxAT+Q=0
(28)
式中:Q為B和Zww的函數。輸出變量的協方差矩陣為
Yyy=E[(Y(t)Y(t)T)]=CXxxCT
(29)
采用協方差法計算平穩性時,需要經過圖6所示的幾個環節,其中,成型濾波器用于將白噪聲信號濾波,生成軌道不平順信號;感覺濾波器根據平穩性指標對輸出信號進行權重濾波,本文采用式(1)所示權重函數進行計算。

圖6 采用協方差法計算平穩性的流程
5 計算研究
采用表2所給參數,軌道不平順采用高速高激擾譜,運用虛擬激勵分析法對上述所建模型進行動力學分析。圖7、圖8分別為無動力吸振器車體與采用二自由度動力吸振器的車體浮沉、點頭加速度響應功率譜,車輛運行速度為300km/h。從圖7可以看出,采用二自由度動力吸振器后,車體浮沉振動主頻從原來的單峰值變成了雙峰值,原浮沉振型頻率0.6782Hz處峰值大幅減小。圖8顯示,采用二自由度動力吸振器后,車體點頭振動主頻率處峰值得到小幅抑制,但抑制作用不如浮沉明顯。
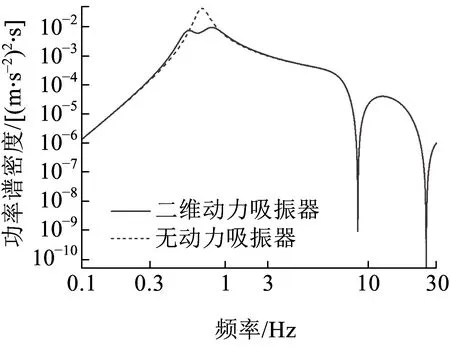
圖7 浮沉加速度功率譜密度
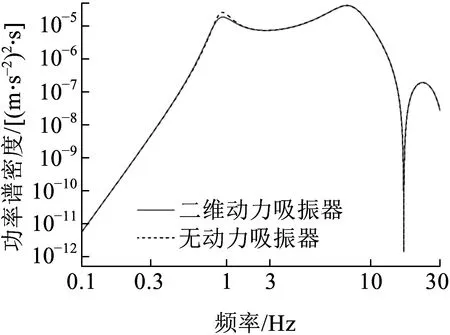
圖8 點頭加速度功率譜密度
圖9、圖10分別為無動力吸振器車體與采用二自由度動力吸振器車體在前、后轉向架處的垂向加速度響應功率譜。無論是前轉向架處還是后轉向架處,采用二自由度動力吸振器后,車體低頻處共振峰均從單峰值變為雙峰值,且振動峰值明顯降低,這是由于采用二自由度動力吸振器后,車體浮沉振動、點頭振動同時受到抑制的結果。
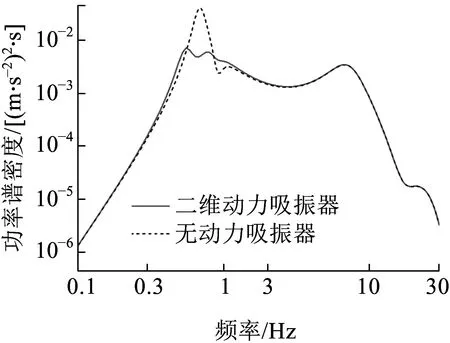
圖9 車體前轉向架處加速度功率譜密度

圖10 車體后轉向架處加速度功率譜密度
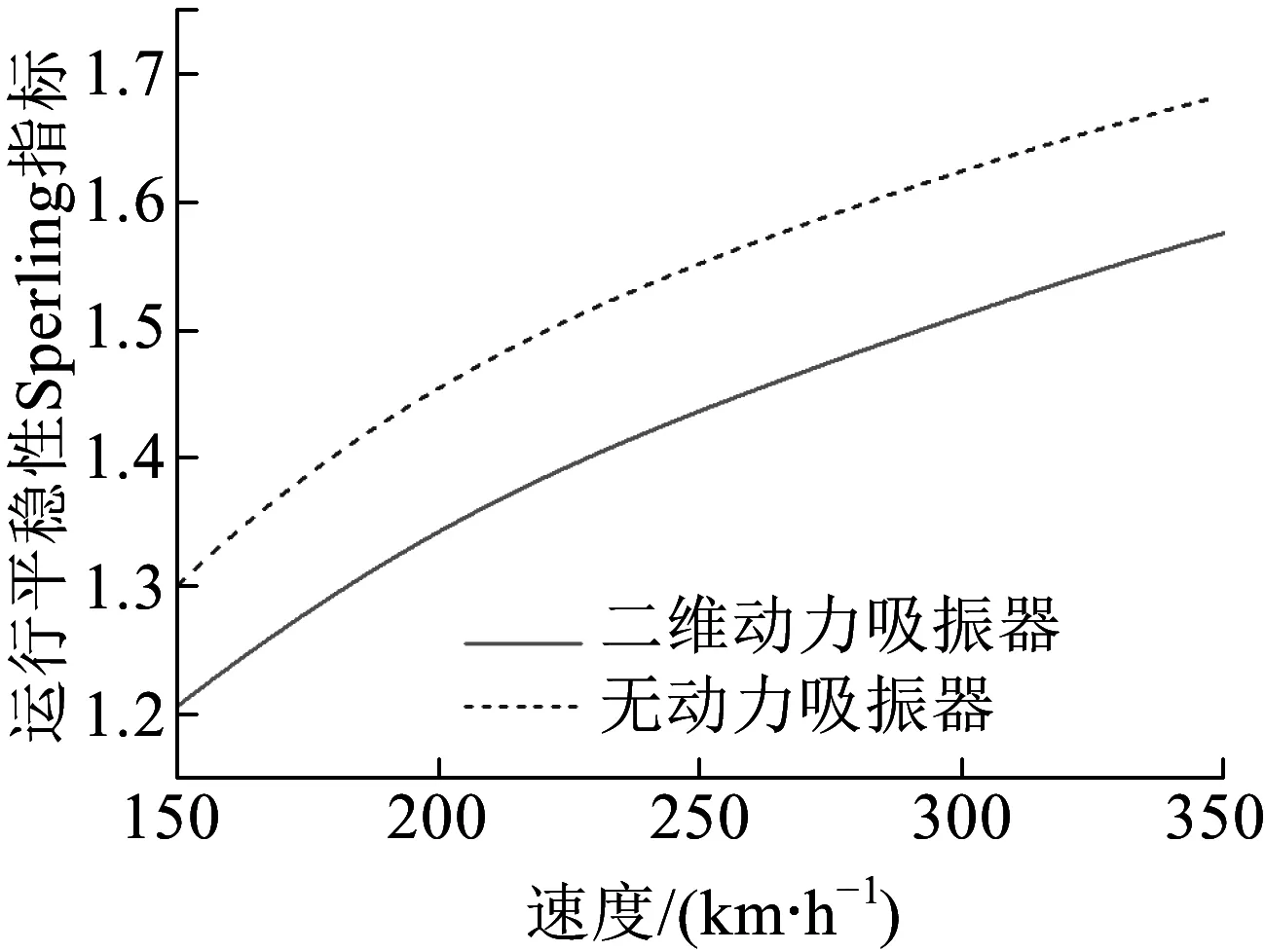
圖11 車體中部平穩性指標
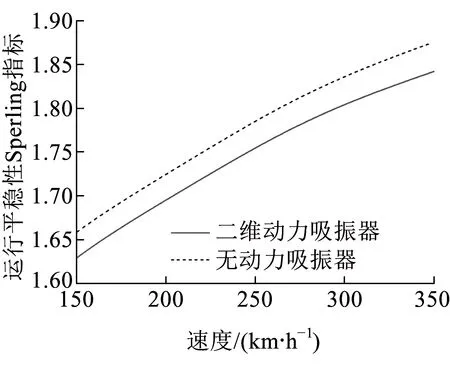
圖12 車體前轉向架處平穩性指標
圖11~圖13分別為無動力吸振器車體與采用二自由度動力吸振器車體中部、前轉向架、后轉向架處的平穩性指標。采用動力吸振器后車體中部、前轉向架、后轉向架處運行平穩性指標均降低,其中,車體中部降低幅度最大,這是由于采用二自由度動力吸振器后,車體浮沉、點頭振動被動力吸振器所抑制,以致車體低頻振動加速度幅值降低,從而使運行平穩性得到改善。
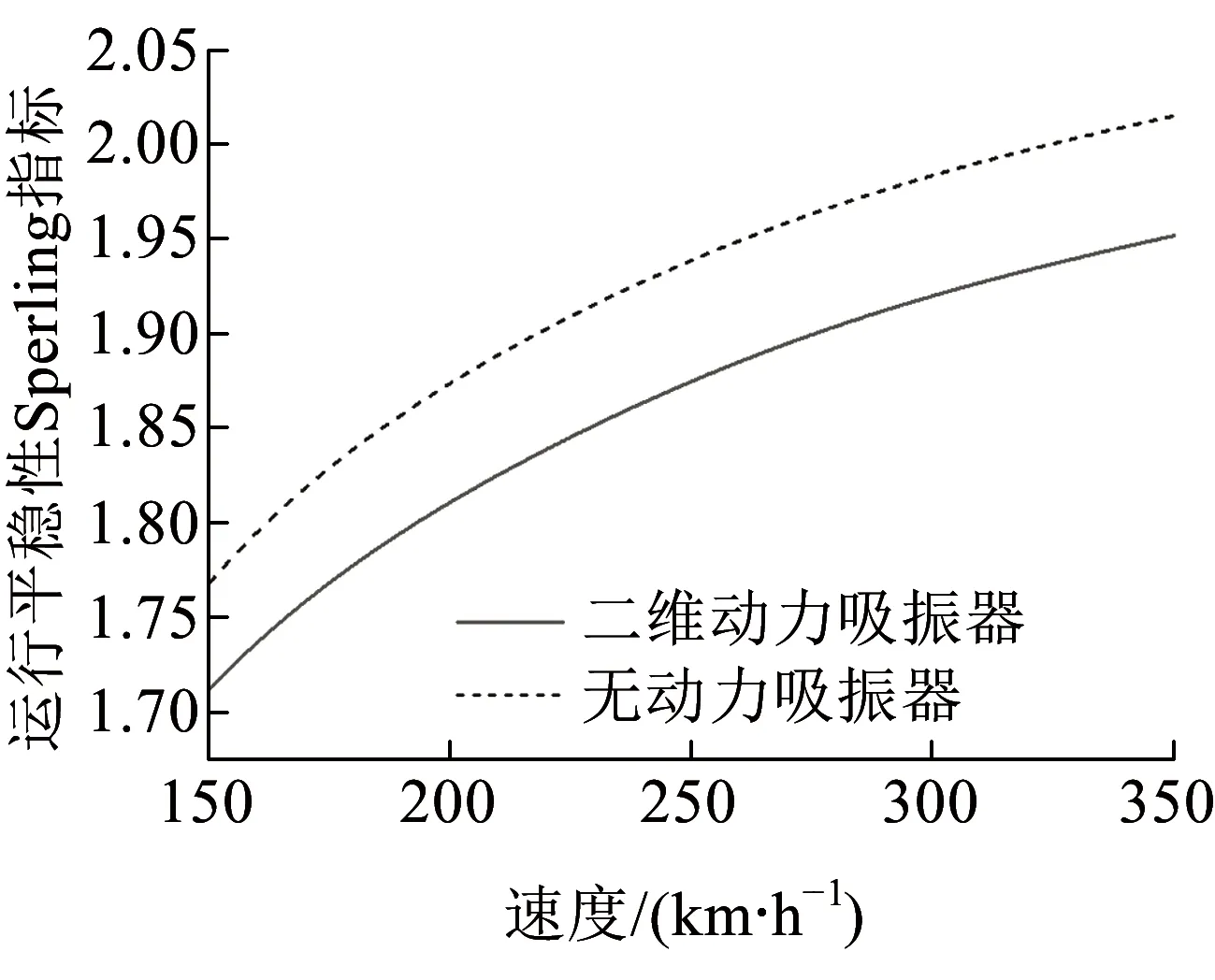
圖13 車體后轉向架處平穩性指標
將車體視為主振動系統,車下設備視為動力吸振器,對于給定的高速動車組而言,其車下設備質量及轉動慣量已經確定,可通過吊掛剛度、阻尼比、吊掛跨距對吸振器浮沉、點頭頻率、阻尼比進行優化。圖14為車下設備與車體質量比μm=0.1時,不同吊掛剛度對車體浮沉振動加速度功率譜的影響,其中吊掛剛度為59kN/m時,車下設備實現浮沉振動最優同調,可以看出,此時車體浮沉振動加速度幅值最小,浮沉振型頻率附近的兩個峰值基本等高。圖15為不同吊掛阻尼比對車體浮沉振動加速度功率的影響,其中吊掛阻尼比為0.22時,車下設備實現浮沉振動最優阻尼,此時車體振動加速度幅值最小。圖16為車下設備與車體慣量比μJ=0.1時,吊掛跨距之半對點頭功率譜的影響,其中吊掛跨距之半為6.5m時,車體設備實現點頭振動最優同調,可以看到,此時車體點頭振型頻率附近峰值最小。
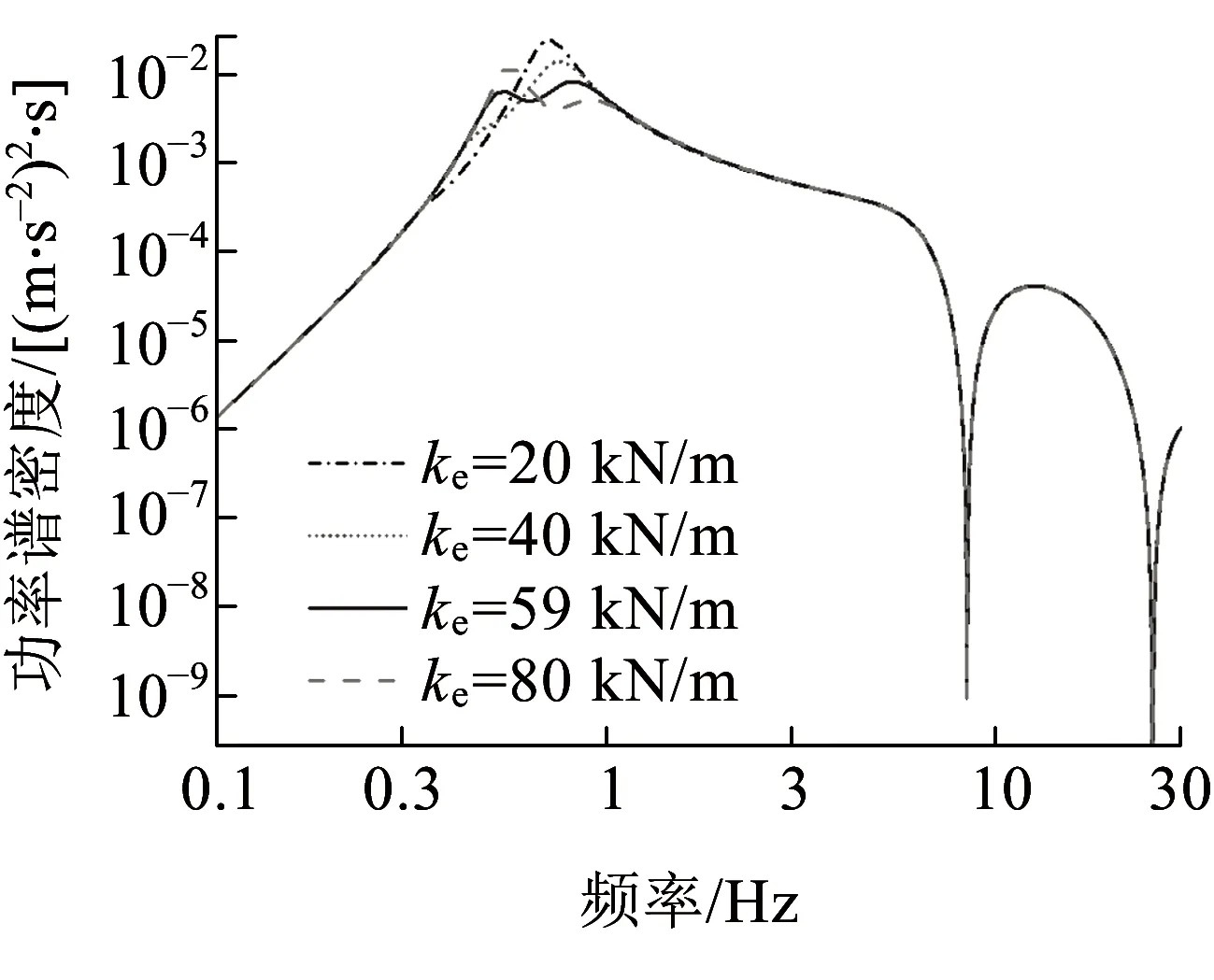
圖14 吊掛剛度對車體浮沉功率譜的影響
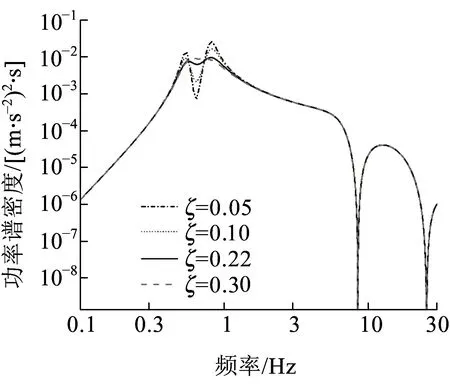
圖15 吊掛阻尼比對車體浮沉功率譜的影響
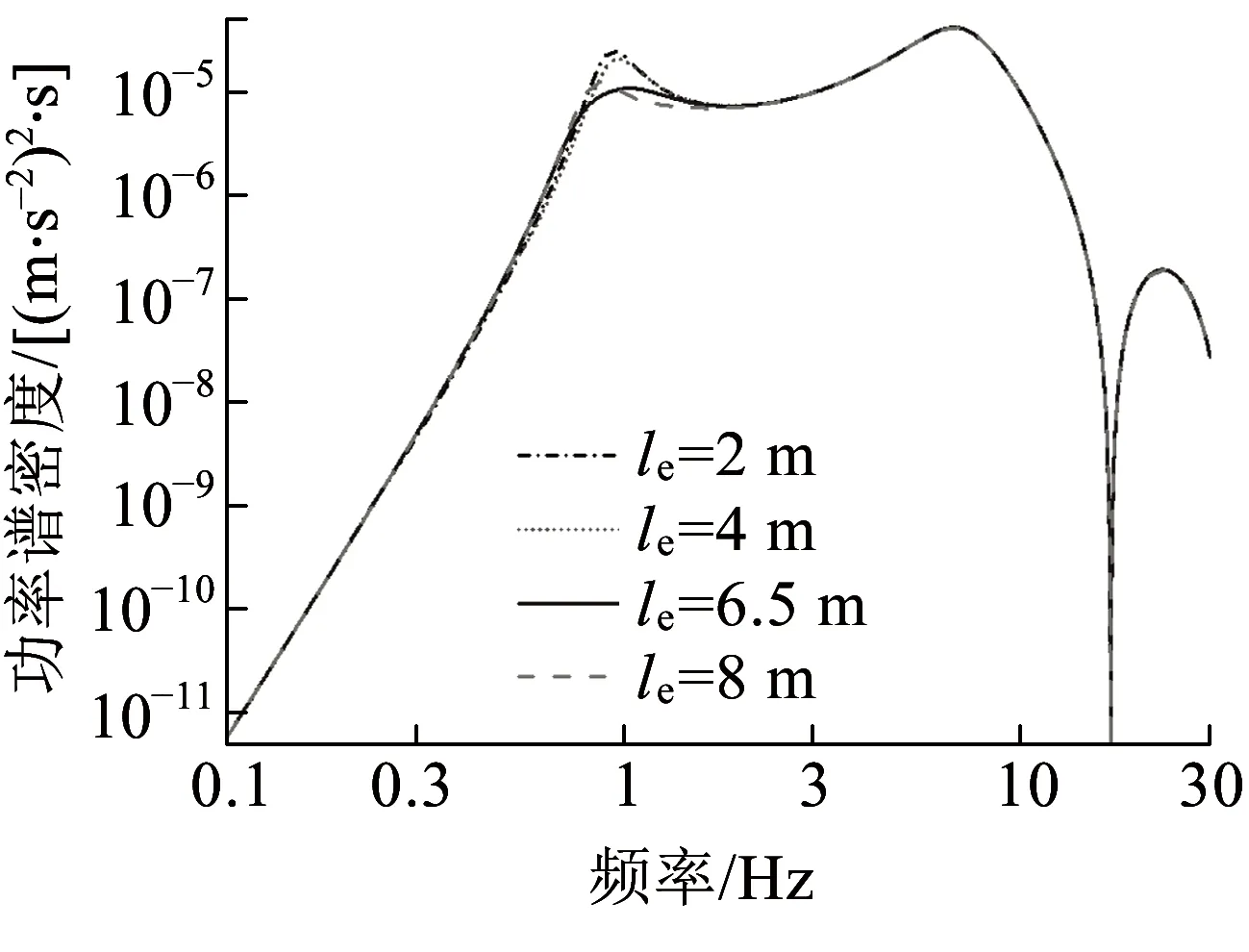
圖16 吊掛跨距之半對點頭功率譜的影響
6 結論
基于反應人體敏感頻率的平穩性指標權重函數,結合實測高速動車組垂向振動加速度功率譜密度,指出對車體剛性振動進行控制的重要性。建立高速動車組垂向動力學模型,采用基于加速度的二自由度動力吸振原理,對車體浮沉及點頭振動進行控制,采用虛擬激勵法及平穩性快速算法分別計算車體響應加速度功率譜密度及運行平穩性,研究結果表明:
(1)采用二自由度動力吸振器后,車體浮沉振動主頻從原來的單峰值變成了雙峰值,原浮沉振型頻率處峰值大幅減小。
(2)當二自由度動力吸振器實現最優同調、最優阻尼時,對點頭及浮沉振動的抑制效果最佳。
(3)二自由度動力吸振器能夠有效降低車體浮沉及點頭振動,提高車輛運行平穩性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
裝備制造技術(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
制造技術與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38
