基于不同駕駛員特性的汽車防撞安全距離算法研究
2019-08-03 02:52:22于佳
中國新技術新產品 2019年11期
于佳
摘? 要:隨著汽車數量的不斷增加,不僅給道路交通帶來了壓力,也增加了交通安全隱患。為了提高車輛行駛的安全性,目前很多品牌的汽車都加裝了汽車主動防撞安全系統。加裝主動防撞系統后,能夠消除部分隱患,減少交通事故概率,并且盡量不影響車輛行駛的平順性。該文首先研究了作為主動防撞系統的核心的安全距離模型,發現駕駛員反應時間是影響安全距離結果的重要因素。進而分析研究了影響駕駛員反應時間的各種特性,最后將駕駛員特性添加安全距離模型中,為不同駕駛員計算出更貼合其自身特點的反應時間和安全距離。通過仿真實驗,取得了較好的實驗效果。
關鍵詞:駕駛員特性;反應時間;安全距離;模糊算法
中圖分類號:U491? ? ? 文獻標志碼:A
1 現有安全距離模型概述
汽車主動防撞安全系統是由安全距離模型實現的,通過計算安全距離,判斷出汽車是否需要進行緊急制動或何時需要進行緊急制動,以確保汽車在行駛過程中不會與前車相撞。目前現有的安全距離模型都是通過預估前車行進狀態,分析自身車速與前車車速,計算出一個安全距離。現有的安全距離模型有一些已經考慮到駕駛員反應時間因素,具體因素如下。
駕駛員反應時間t,自身車速為v1,前車車速v2,自身車速加速度為a1,前車加速度為a2,當前后兩車保持相對靜止時設需要保持的必要最小間隔距離為d0。
通過上述公式可以看出,駕駛員反應時間在安全距離模型中占據十分重要的地位,而不同的駕駛員必然會具有不同的反應速度,因此安全距離應該因人而異,為不同駕駛員設置不同的安全距離。
2 駕駛員特性
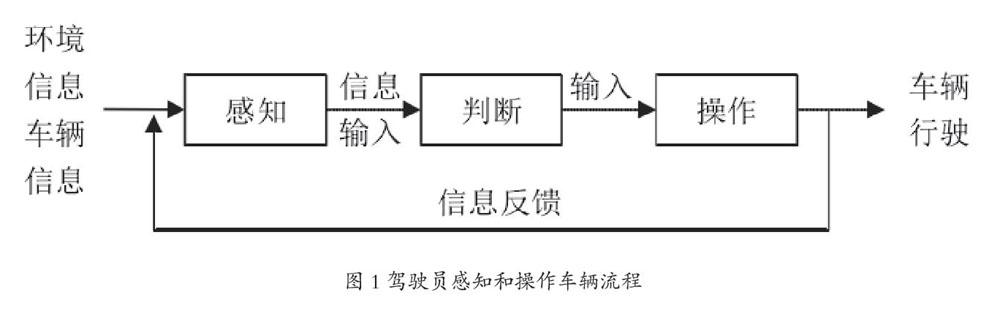
該文研究和分析的駕駛員特性是指能影響到駕駛員反應速度的特性。駕駛員在駕駛車輛過程中,需要不斷感知自身車輛狀態信息和道路環境因素,綜合分析判斷后,大腦做出決策,進而身體執行大腦指令,對車輛進行操控調整,如圖1所示。
結合相關研究資料,決定駕駛員駕車反應速度的主要特性有很多,象生理因素、性格因素、駕駛習慣以及疲勞程度等。通過分析這些因素對駕駛員反應速度影響程度的不同,并考慮到容易得出實驗數據,該文最終采用了3個影響最大的特征,分別是年齡特征、經驗特征和疲勞特征。人會隨著年齡的增長和生理機能下降導致反應速度變慢,隨著駕駛經驗的增加,反應速度會逐漸增快,隨著駕駛員疲勞程度的增加,反應速度也會逐漸下降。
性格差別、心理狀態、血型類型、性別和行為習慣等因素也會對駕駛員遇到緊急狀況時的反應速度造成一定影響,但目前缺乏這些方面的實驗和數據統計,而且實驗樣本數據也較難獲取。雖然這些因素綜合考量后加入模型中進行計算會使最終結果更加精確,但受到實驗條件和數據獲取的困難,該文不予考慮,只考量更便于獲取數據和量化計算的年齡特征、經驗特征和疲勞特征。
3 建立駕駛員反應時間模型
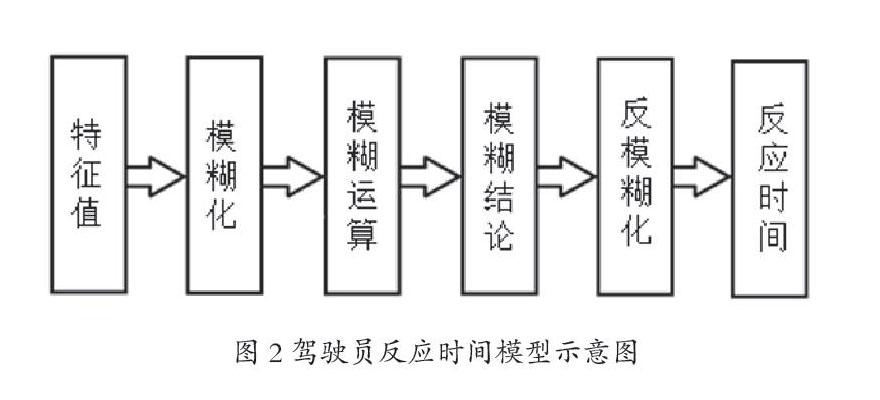
該文根據駕駛員特征的模糊性決定采用模糊算法來計算反應時間。將年齡特征、經驗特征及疲勞情況作為特征值,根據模糊特征值的函數將特征值進行模糊化處理,將具體的數值轉化為可以用語言來描述的模糊值,這個過程就是模糊化。將特征值模糊化處理后輸入模型中進行模糊運算,這個過程需要用到模糊規則。模糊規則是事先根據專家經驗或實際需要制定好的語言規則,適用于模糊集合的推理運算。經過模糊運算后得出駕駛員反應時間的模糊值,這個模糊值是無法精確表達具體時間的,因此最后還要再利用反模糊化計算得出駕駛員反應所需具體時間,這個最后的時間是精確的具體數字時間值,如圖2所示。
3.1 年齡特征
把年齡特征設為論域,將模糊集劃分為3個子集,分別為青年N1、中年N2和老年N3。結合駕駛車輛的年齡要求,論域取值范圍為 [18,70]。3個模糊子集相對應的隸屬度函數設為n1、n2和n3,根據年齡逐年遞增的特點采用梯形函數。在18歲和70歲之間,大概平均將年齡等分成5個部分,將30歲、40歲、50歲和60歲設為梯形函數的幾個關鍵節點,可以列舉出梯形的隸屬度公式。為了便于計算,隸屬度函數取值均為0~1。
這里將駕駛經驗用駕駛里程數來代替,可以更加直觀和數字化地表現出駕駛經驗是否豐富,而且易于統計和獲取具體里程數值。根據駕駛里程數量增長變化的特點,將模糊集論域取值定為0到+∞,并劃為3個子集,分別為S1、S2和S3,代表短、中、長。對應的隸屬度函數同樣采用梯形函數,將5 000 km、10 000km、15 000 km和20 000 km設為梯形函數幾個關鍵節點。
3.2 疲勞特征
疲勞特征的描述是個模糊概念,為了便于用數字進行描述,因此把取值定為 [0,10]。將根據疲勞特征的輕重程度定義模糊子集分別為P1、P2和P3。對應的隸屬度函數選取為高斯型隸屬度函數。σ是高斯函數曲線的寬度,取值設為2,c為各子集中心點。
3.3 反應時間
反應時間一般用長短來衡量,這依然是一個模糊概念。經過綜合分析,決定使用4個模糊子集來描述時間的長短。分別設為短T1、較短T2、較長T3和長T4,對應的隸屬度函數也采用高斯型函數。根據已有文獻的統計結果,將反應時間的取值范圍定為[0.2,3]。隸屬度函數中c的值分別取為各子集中心,σ取值為2。
3.4 模糊規則
該文模糊規則使用if-and-and-then形式,根據3個輸入特征值的不同模糊值,窮舉法列出模糊規則表,根據模糊規則表進行模糊運算。限于篇幅僅列出兩條模糊規則為例。
3.5 反模糊化
根據模糊規則計算出的反應時間是一個模糊值,需要通過反模糊化計算將模糊值轉換成一個精確的時間值。該文采用加權的方式進行反模糊化運算。年齡特征、經驗特征及疲勞特征對應的加權值為ω1、ω2、ω3,加權和為1。根據已有的統計結果,疲勞特征對駕駛行為影響最深,其余兩個特征次之,因此ω1取值0.3,ω2取值0.3,ω3取值0.4,該取值可在實際實驗中逐步微調以達到算法最優。
將年齡特征、經驗特征和疲勞特征的隸屬度進行加權計算,得出反應時間的隸屬度取值。之前根據模糊運算已經得出反應時間的模糊值。根據加權后隸屬度值和模糊值對應的模糊子集隸屬度函數,可以反向計算出精確的反應時間值。這個時間值就是駕駛員反應時間模型的最終結果,將其加入安全距離模型中,進而計算出安全距離。
4 結論
利用MATLAB軟件進行仿真計算,對多個駕駛員樣本的年齡特征、經驗特征和疲勞特征進行了統計和計算,對不同駕駛員的模型計算結果進行分析。年齡特征和反應所需時間成正比,經驗特征與反應所需時間成反比,疲勞特征與反應時間成正比,同時年齡特征通常與經驗特征也成正比。因此對突發事件所需反應時間應對上述特征予以綜合考量,結合不同駕駛員的不同特征制定動態的反應時間和安全距離,從而切實有效的提供交通安全保障。
隨著大數據的統計搜集和分析應用越來越普及,駕駛員除年齡特征、經驗特征和疲勞特征之外的其余特征也會逐漸被全面統計和分析。象建立駕駛員特征庫,綜合分析駕駛員的特征因素,從而建立更精準的數學模型。
參考文獻
[1]中國道路交通安全協會.2017年一季度全國機動車和駕駛人數據公布[J].道路交通管理,2017(5):10.
[2]夏道華.基于駕駛員特性的汽車防撞安全距離模型研究[D].錦州:遼寧工業大學, 2016.
[3]王博宇, 李杰偉.中國交通事故的統計分析及對策[J].當代經濟, 2015(7):116-119.
[4]張立存.高速汽車彎道前方碰撞預警算法的研究[D].長春:吉林大學,2004.
[5]張廣祥.基于駕駛行為的汽車主動防撞預警系統的安全車距研究[D].長春:吉林大學,2011.
[6]邊明遠.考慮駕駛員個體特性的汽車安全行駛間距模型[J].中國機械工程, 2010, 21(12):1502-1506.
