一種基于JPDA算法的多目標數據互聯方法研究
2019-08-06 13:48:19楊佳義
無線互聯科技 2019年10期
楊佳義

摘? ?要:文章研究了目標跟蹤時常出現的航跡相交情況下的波門內數據互聯。由于傳統數據互聯采取最近鄰算法,常常導致濾波發散、跟蹤丟失等嚴重情況出現。因此,文章針對此種現象,防止因數據互聯錯誤而導致的嚴重錯誤,提出一種避免數據互聯出現嚴重錯誤的最優算法—JPDA算法。此種算法考慮了波門內所有回波的所有可能的來源情況,是一種最優算法,具有很好的實際意義。
關鍵詞:JPDA算法;多目標跟蹤;波門
1? ? JPDA算法簡介
聯合概率數據關聯(Joint Probabilistic Data Association,JPDA)算法源于單目標數據互聯算法。當多目標情況下,跟蹤波門不相交時可以采單目標數據互聯算法逐一計算。當波門相交且有點跡落入波門相交區域時,此時問題很復雜,需要考慮多種可能的情況。
2? ? JPDA算法模型
確認矩陣的引入,確認矩陣的作用是表示有效回波和各跟蹤門之間的關系。
wjT表示量測J落入目標T的跟蹤,1為落入,0為沒有落入。
當有回波落入相關波門的相交區域內時,通過確認矩陣的拆分得到所有互聯事件的互聯矩陣,計算得到互聯概率,再用互聯概率得到狀態協方差和狀態更新值。
對于確認矩陣的拆分可以使用以下方式。
(1)每個量測只能有一個源,即量測不是來源于目標就是來源于雜波和虛警。
(2)每個量測最多與一個目標源進行匹配。
因此,確認矩陣必須滿足除第一當目標j位于跟蹤門t內時,Wjt=1,否則為0。特別的,當t=0時,表示跟蹤門內沒有目標存在。確認矩陣Wjt=0,表示全部量測都來源于雜波或虛警。
除第一列以外(每個量測均有可能來自于雜波),每行每列有且僅有一個不為0的分量,以此來保證量測來源的唯一性。
3? ? 算法流程
由于JPDA法是基于相位檢測自動對焦(Phase Detection Auto Focus,PDAF)推廣來的方法,因此,根據單目標PDAF算法可以推出JPDA算法。對于目標狀態更新值,要得到目標狀態值之前必須計算量測與目標之間的互聯概率。
式(3)表示某目標所有互聯概率之和為1,即所有量測均為雜波或存在某量測與預測值互聯。
θik取值為1,0,該值表示在事件i中量測數據j來自于目標t的判斷。若來源于目標,則為1,來源非目標t,則為0。
當求得確認矩陣后,還需知道聯合事件概率,該概率反映了在k時刻接收到n個量測的條件下,某一量測與該目標的互聯概率。先引入描述互聯事件的兩個變量。
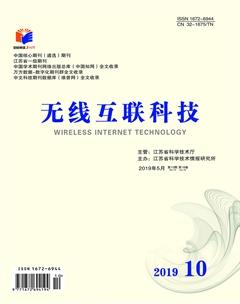
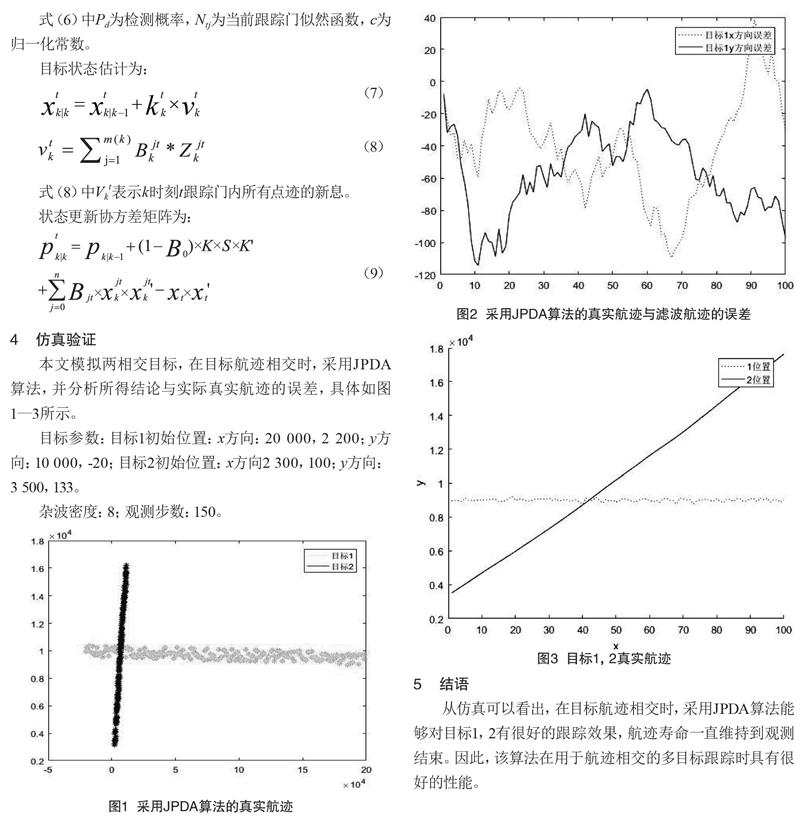
4? ? 仿真驗證
本文模擬兩相交目標,在目標航跡相交時,采用JPDA算法,并分析所得結論與實際真實航跡的誤差,具體如圖1—3所示。
目標參數:目標1初始位置:x方向:20 000,2 200;y方向:10 000,-20;目標2初始位置:x方向2 300,100;y方向:3 500,133。
雜波密度:8;觀測步數:150。
5? ? 結語
從仿真可以看出,在目標航跡相交時,采用JPDA算法能夠對目標1,2有很好的跟蹤效果,航跡壽命一直維持到觀測結束。因此,該算法在用于航跡相交的多目標跟蹤時具有很好的性能。